
Design and Control of a Modular Integrated On-Board Battery Charger for EV Applications with Cell Balancing




Abstract
1. Introduction
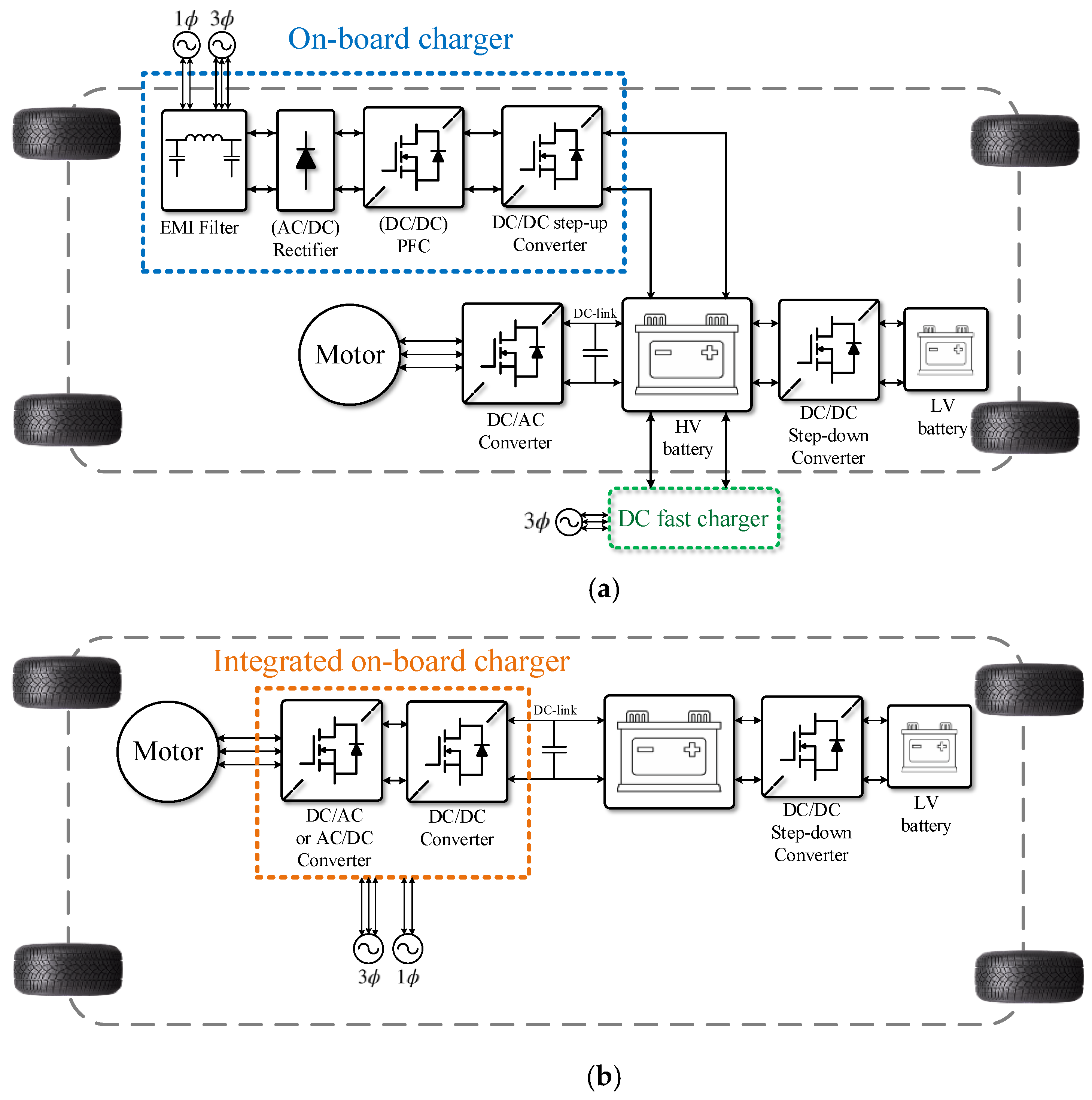
- Normal driving mode, from individual battery segments to the electrical motor;
- Regenerative braking mode, from the vehicle’s kinetic energy to charge the battery segments via the electrical generator;
- Charging mode, from the AC grid to the battery segments.
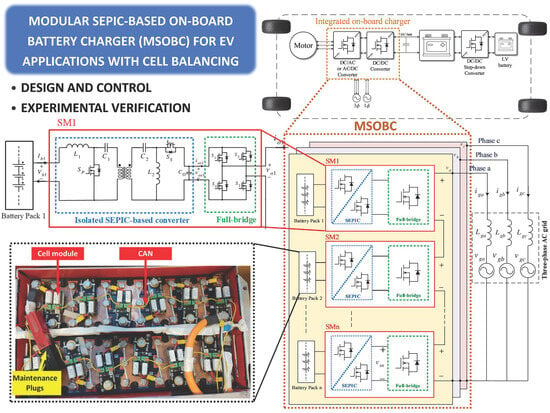
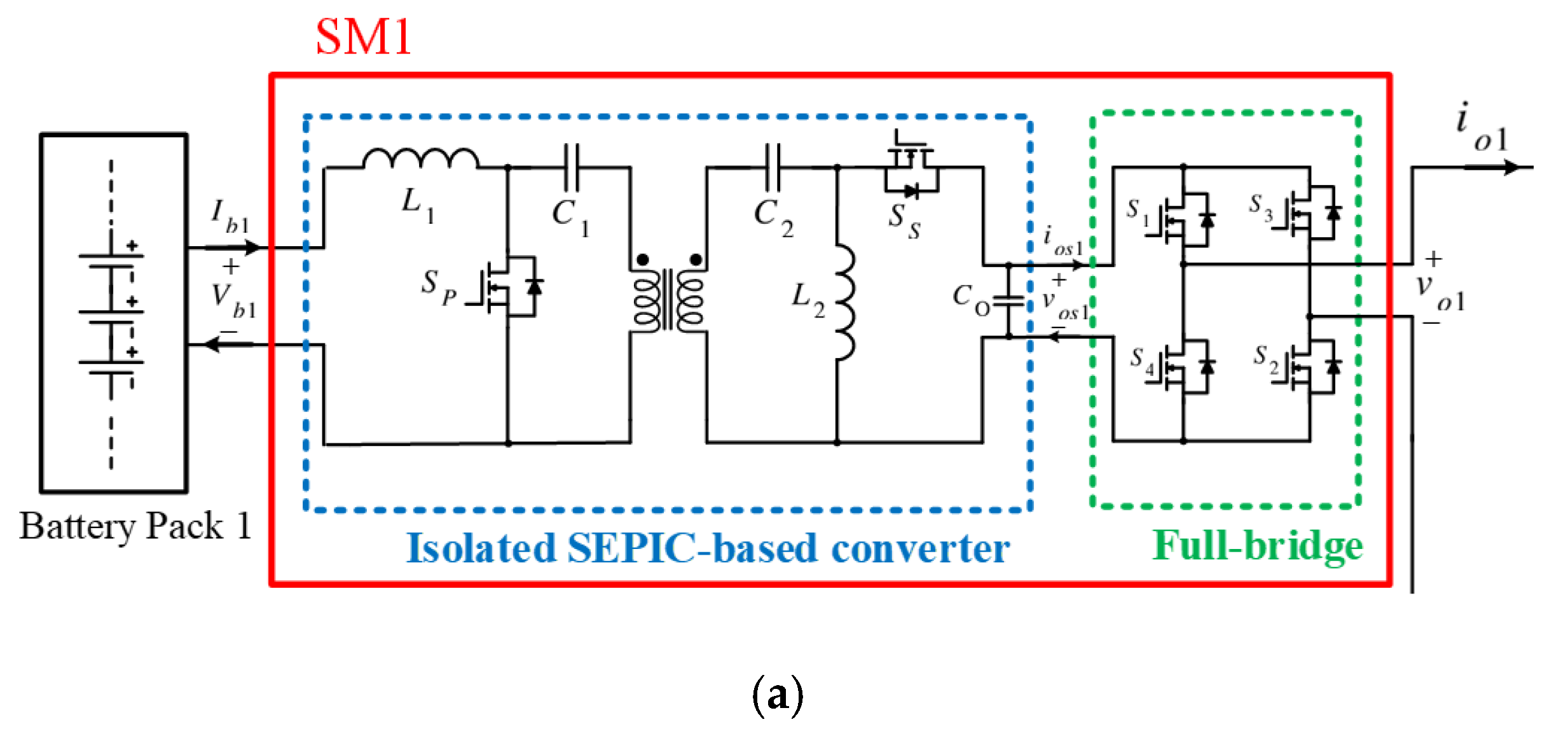
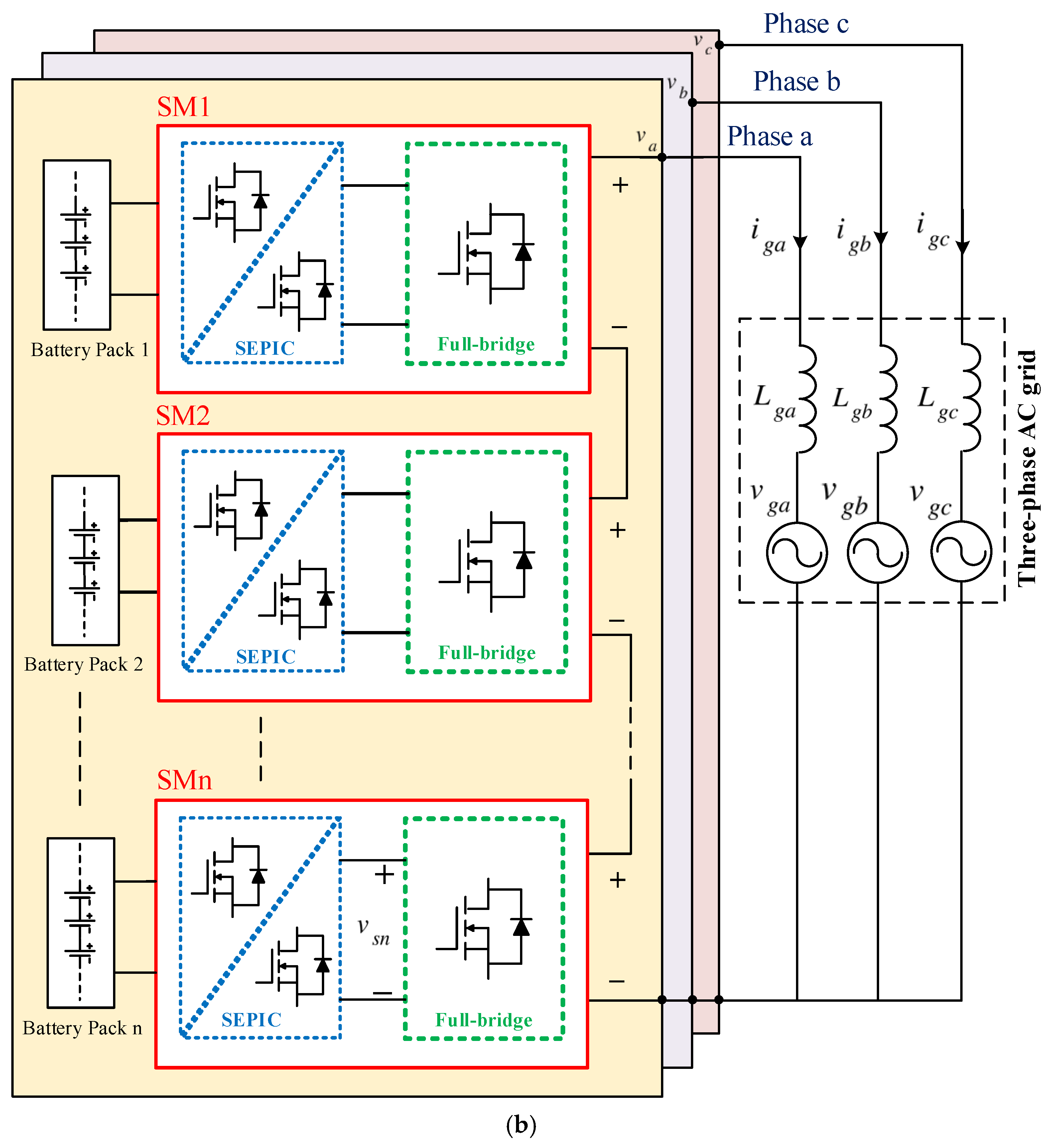
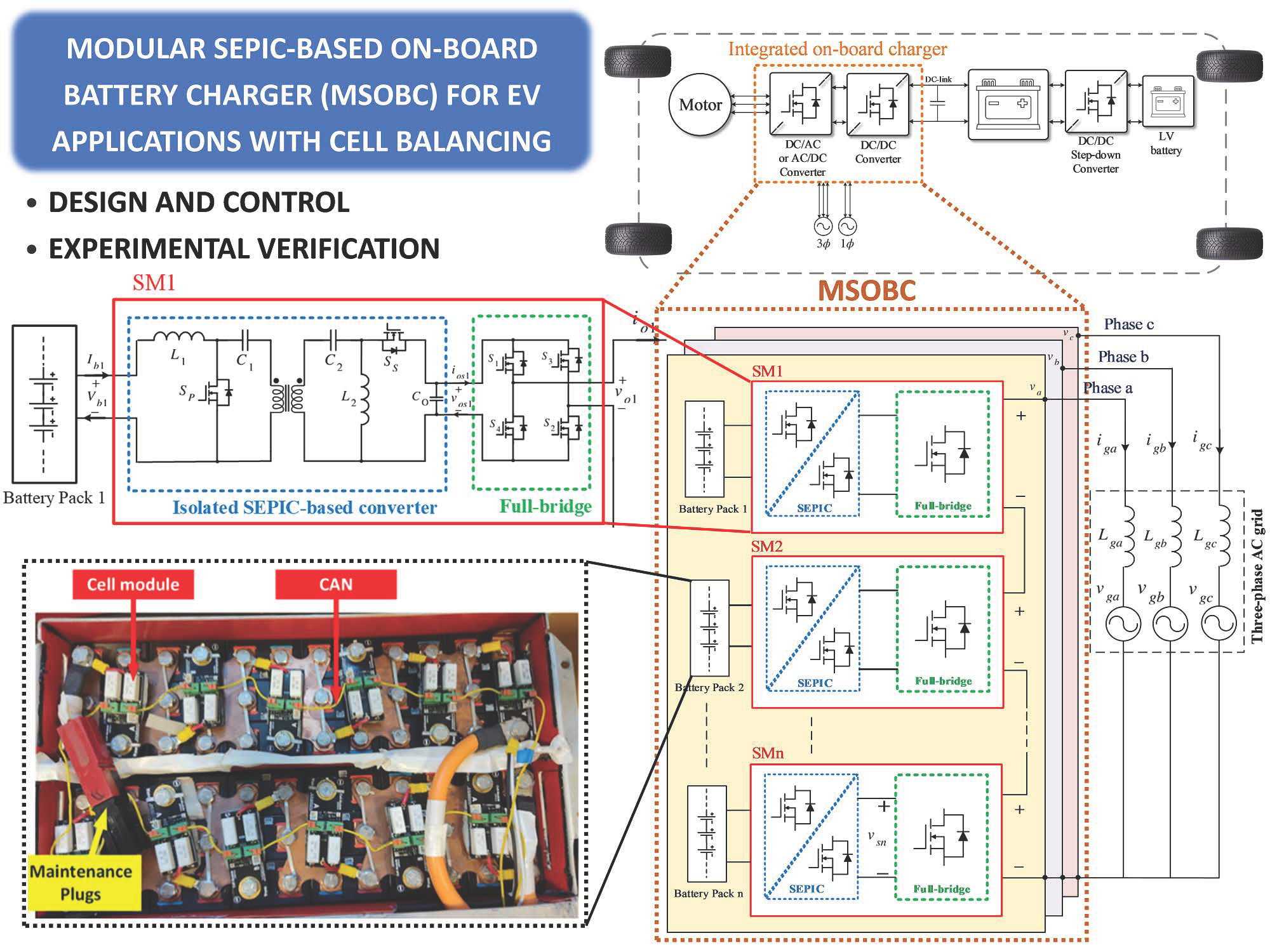
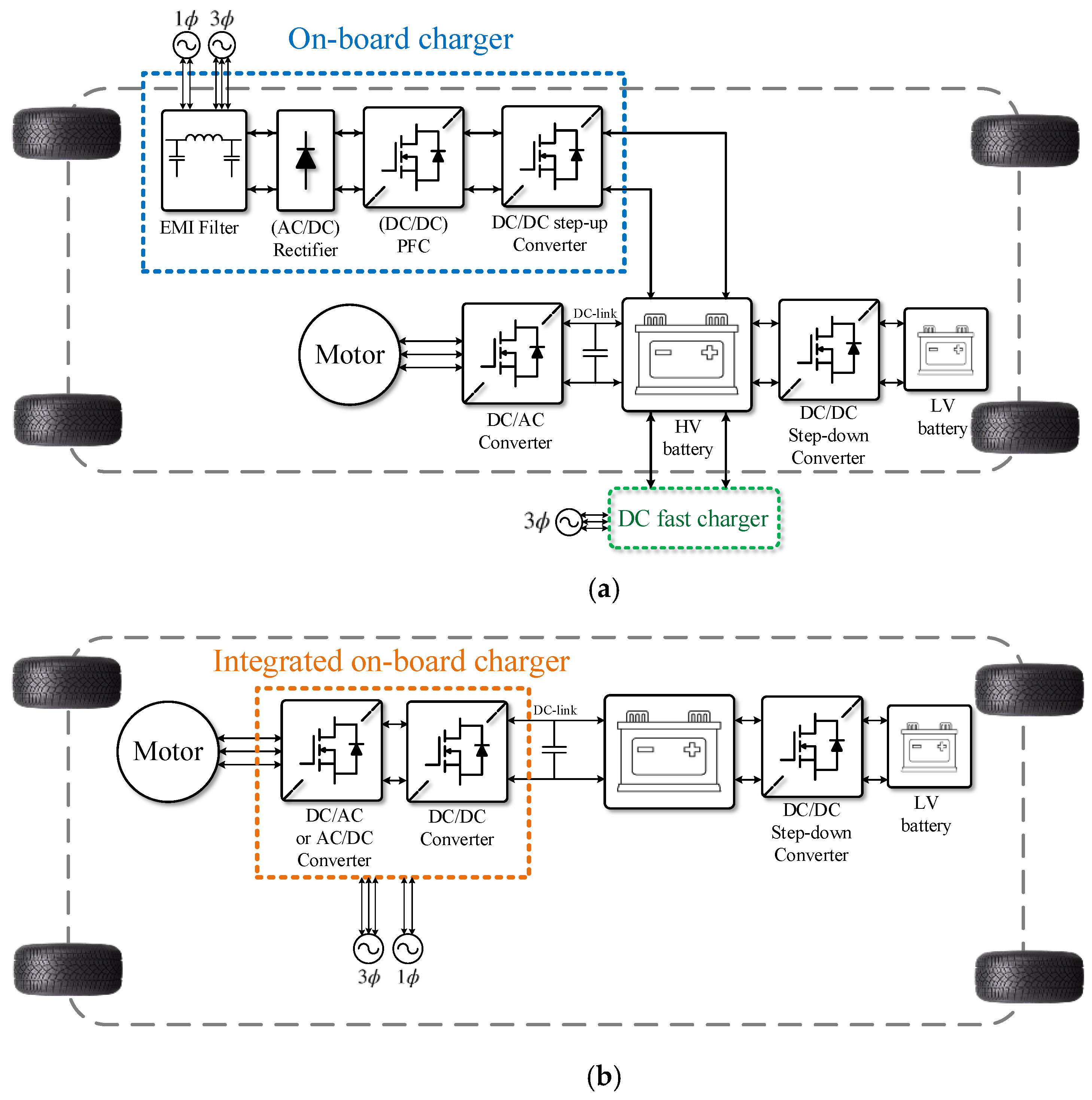
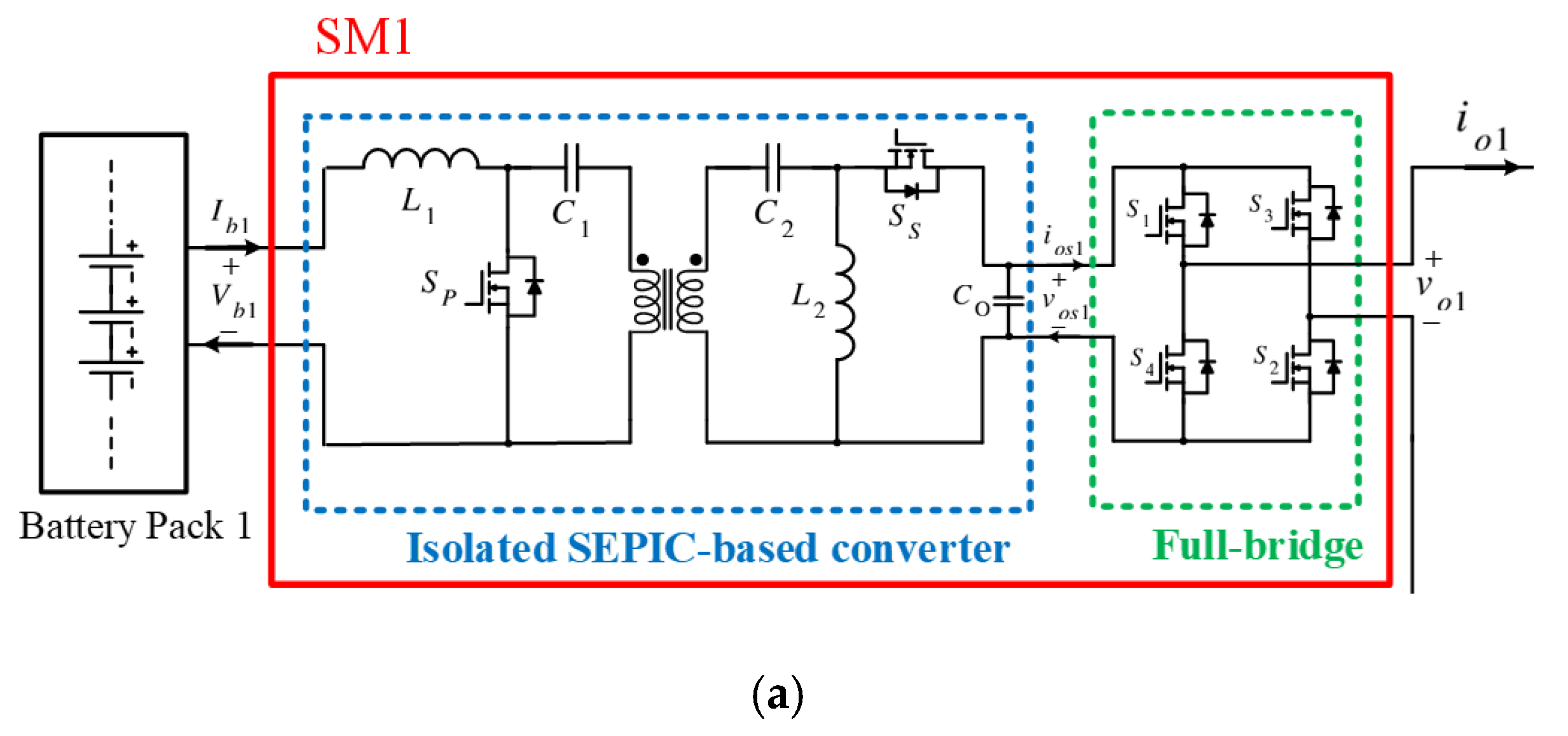
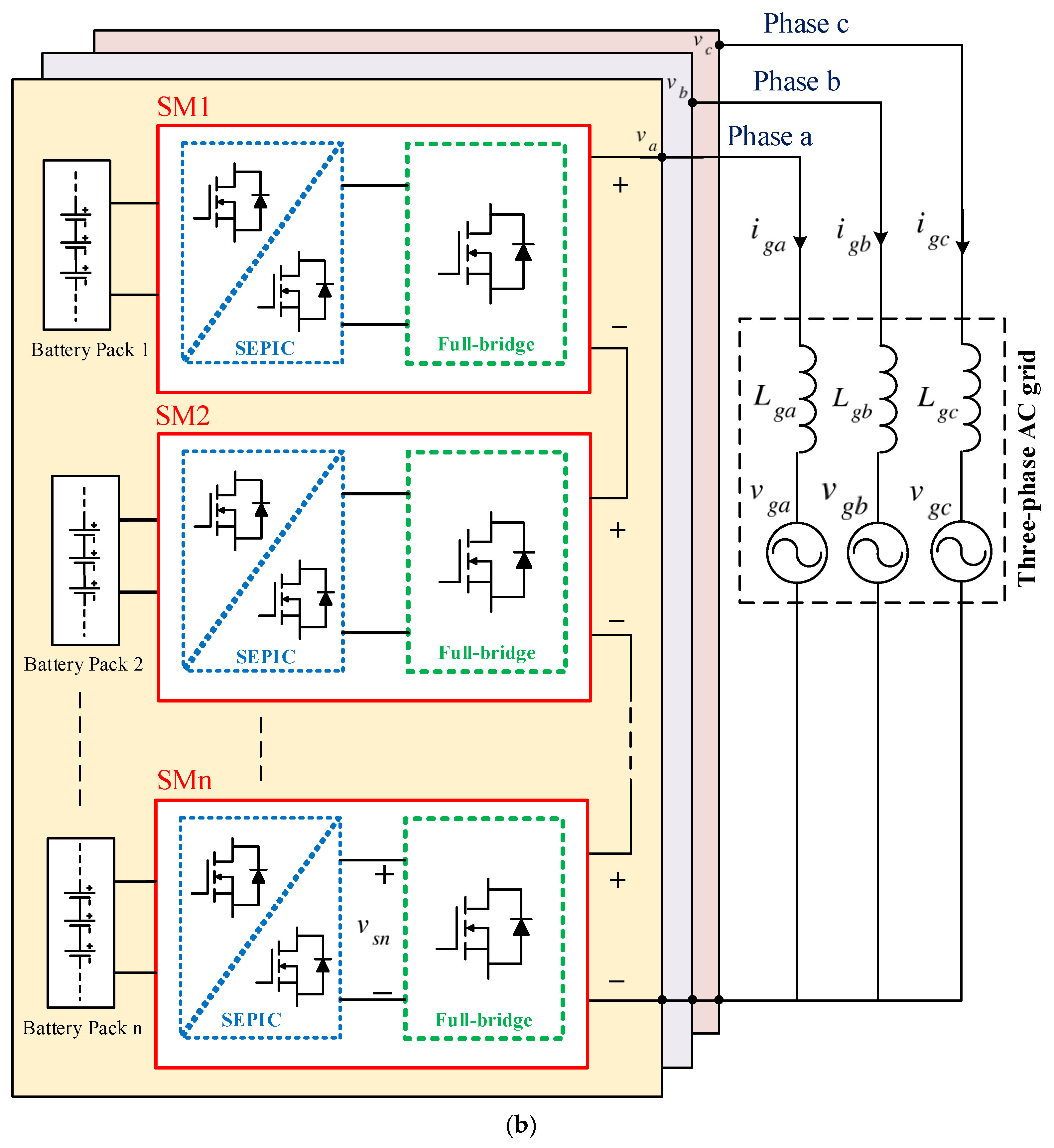
2. Description of the Proposed Integrated Modular OBC
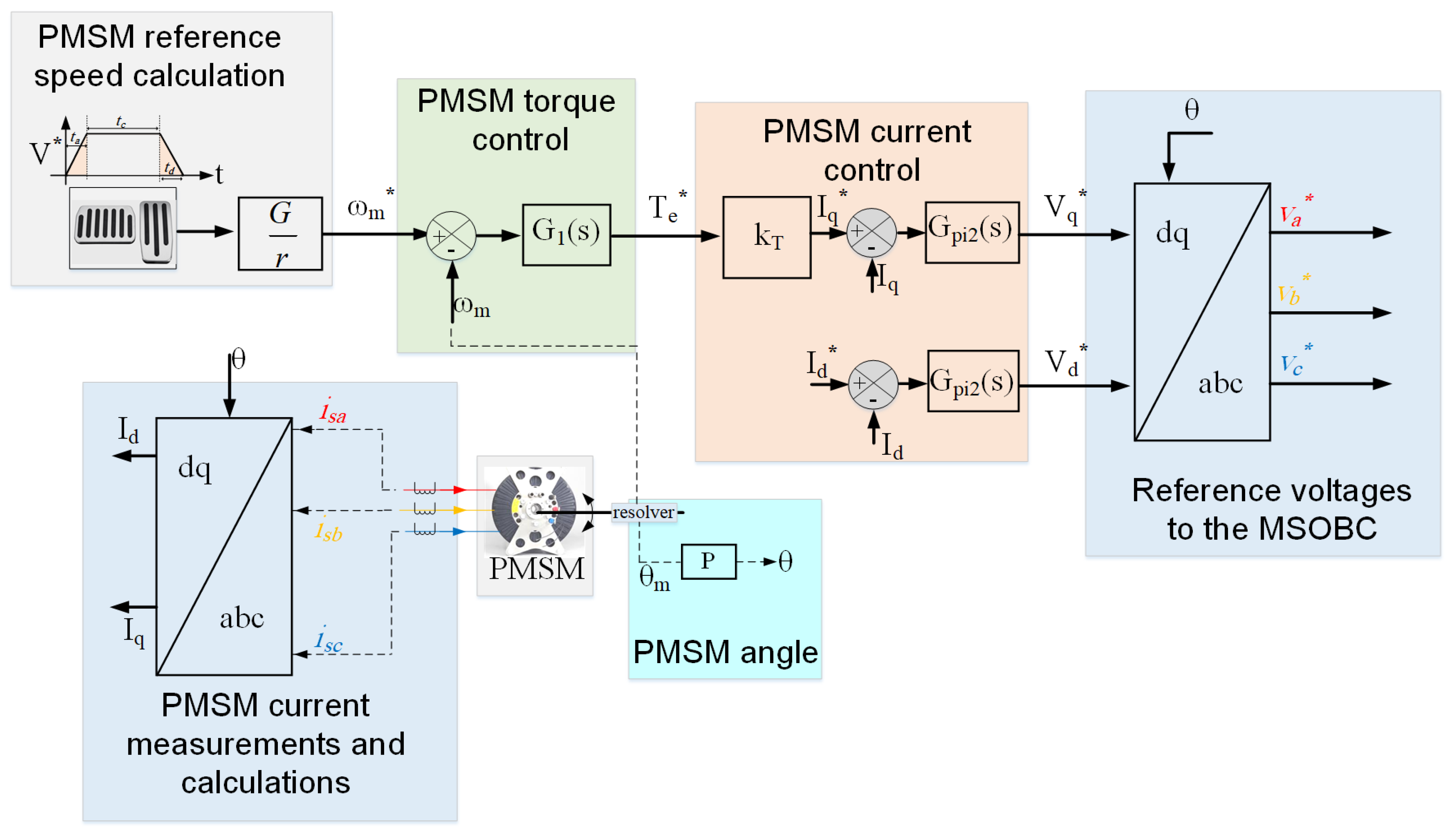
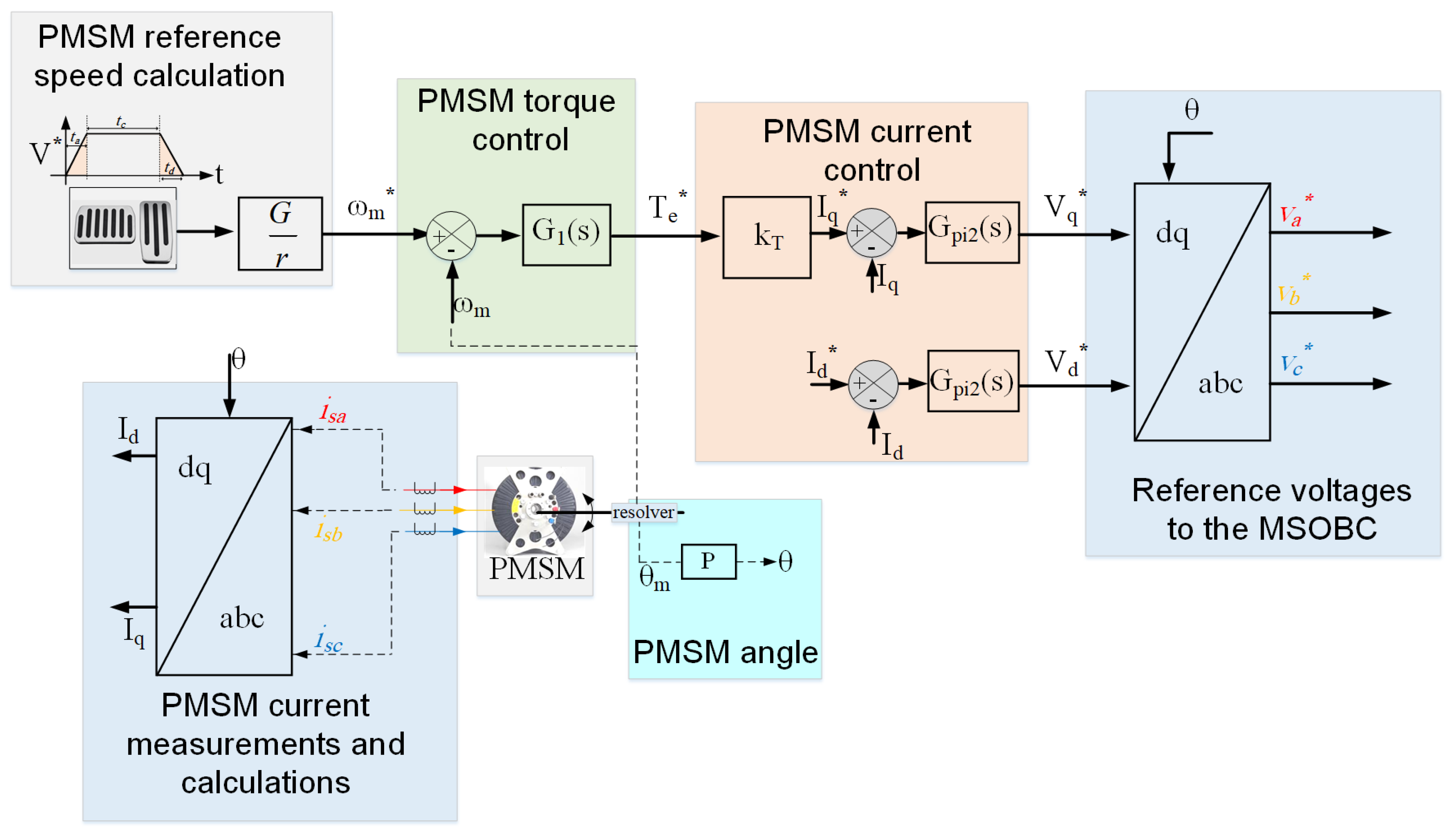
2.1. PMSM Model
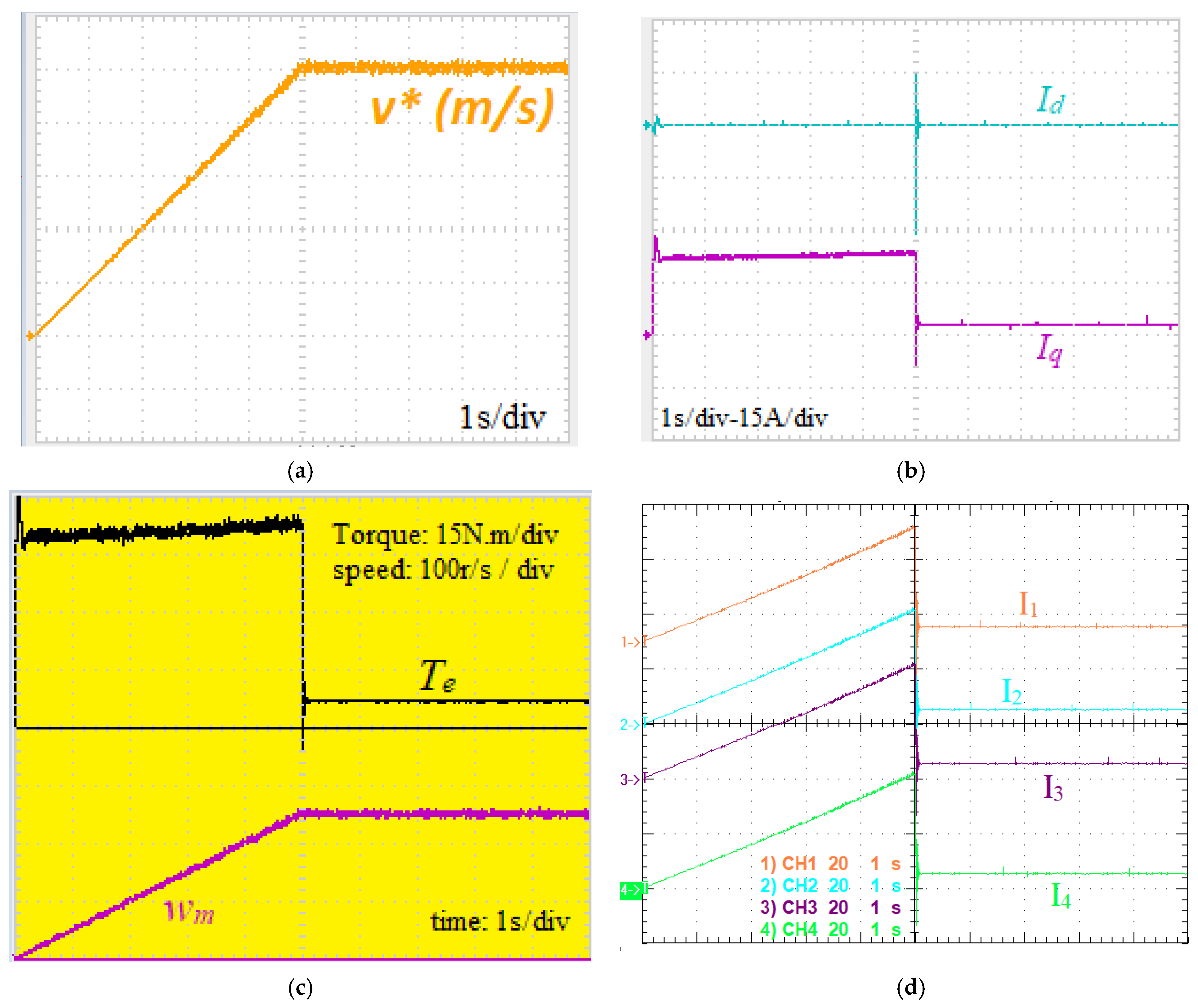
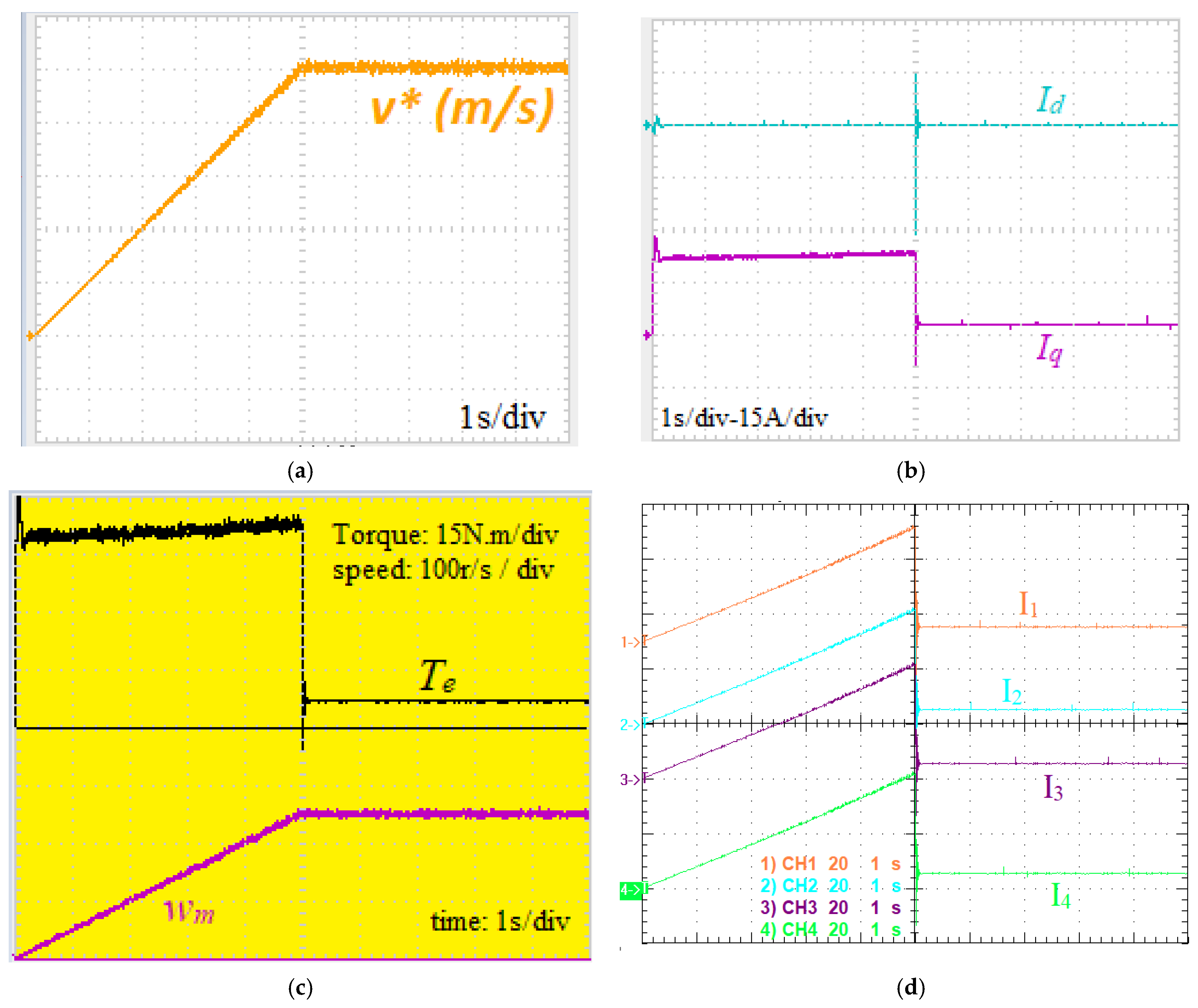
2.2. Driving Mode of the EV with the MSOBC
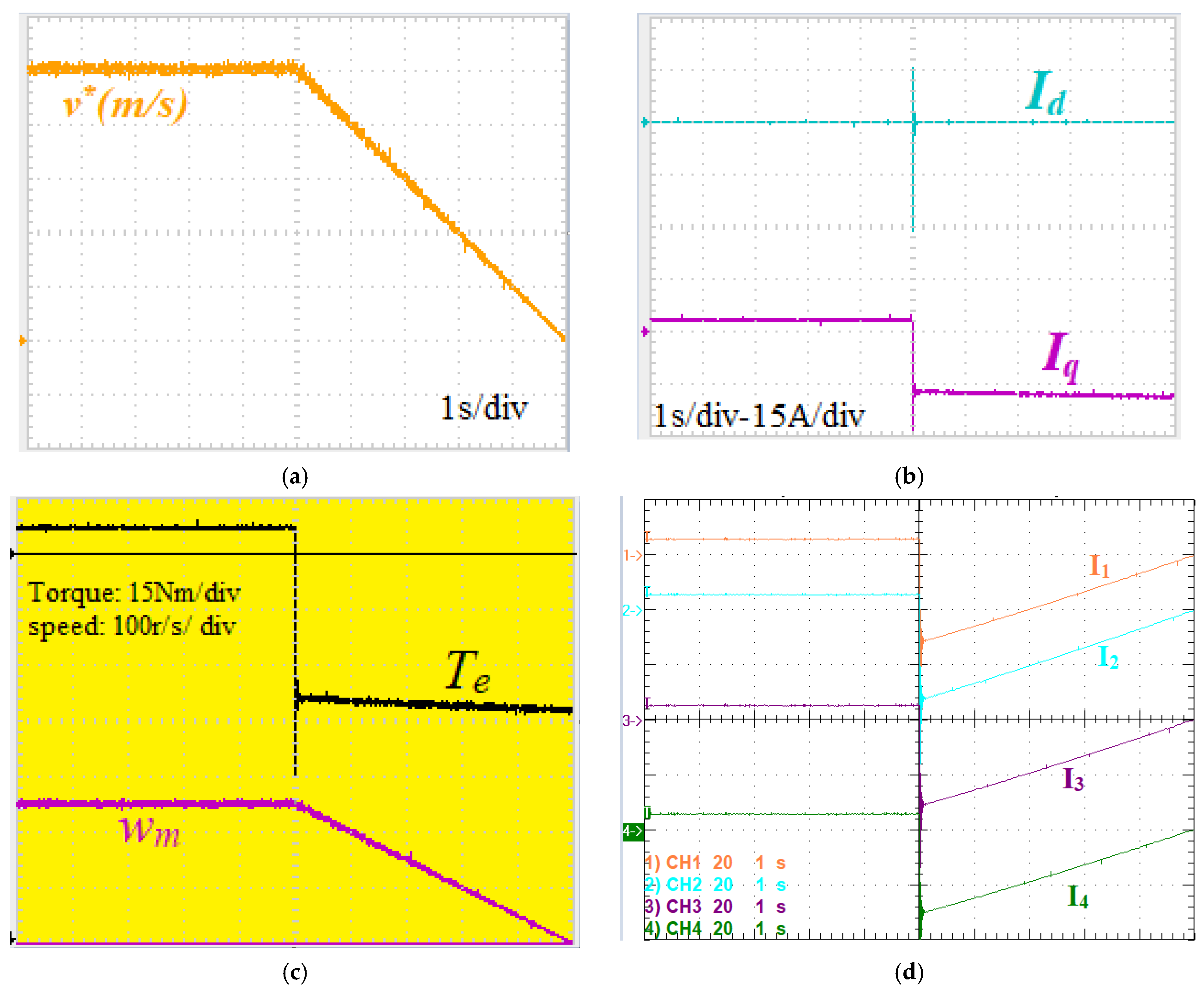
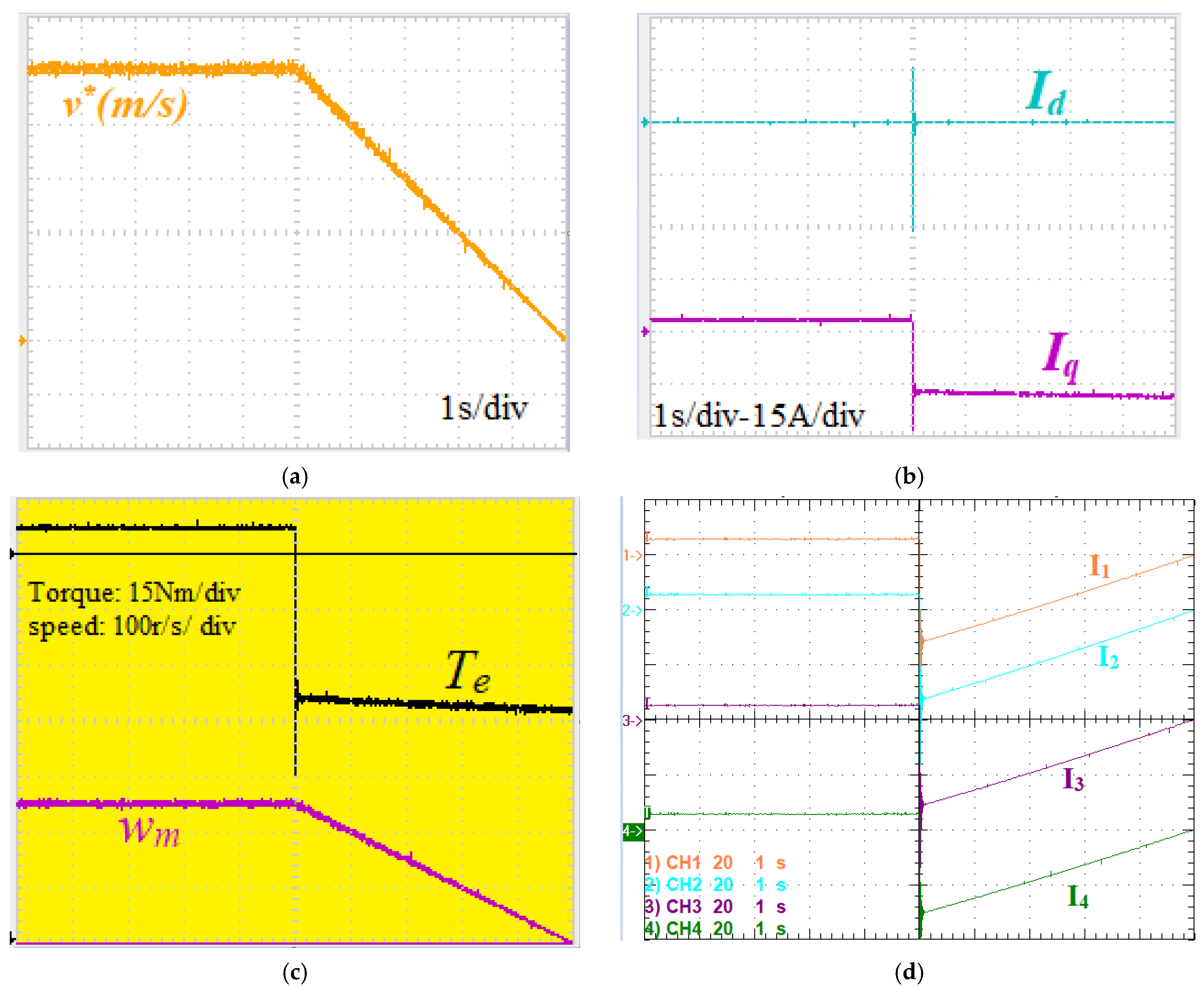
2.3. Braking Mode
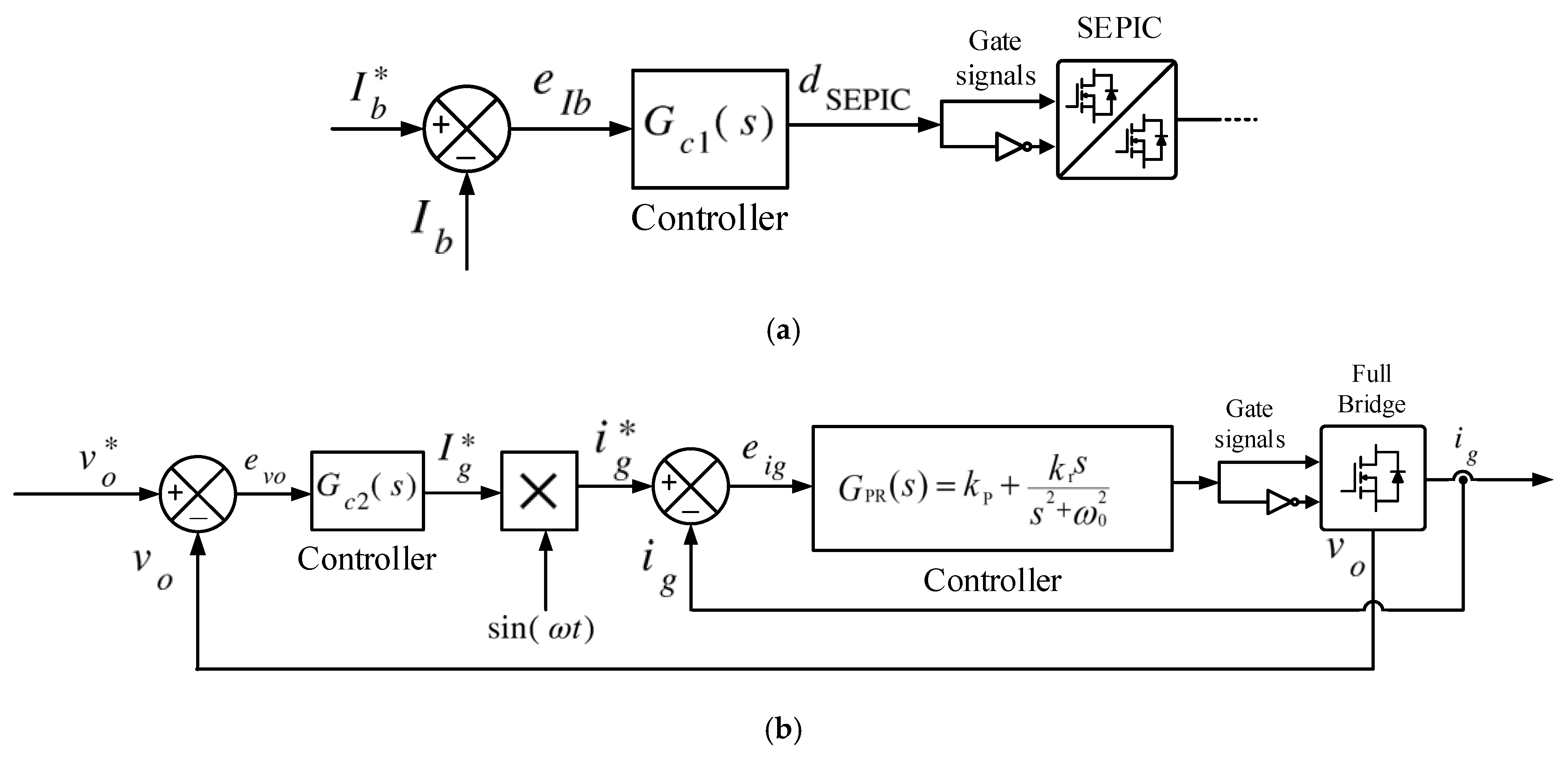
2.4. Charging Mode
3. Problem of Unbalanced Battery Packs
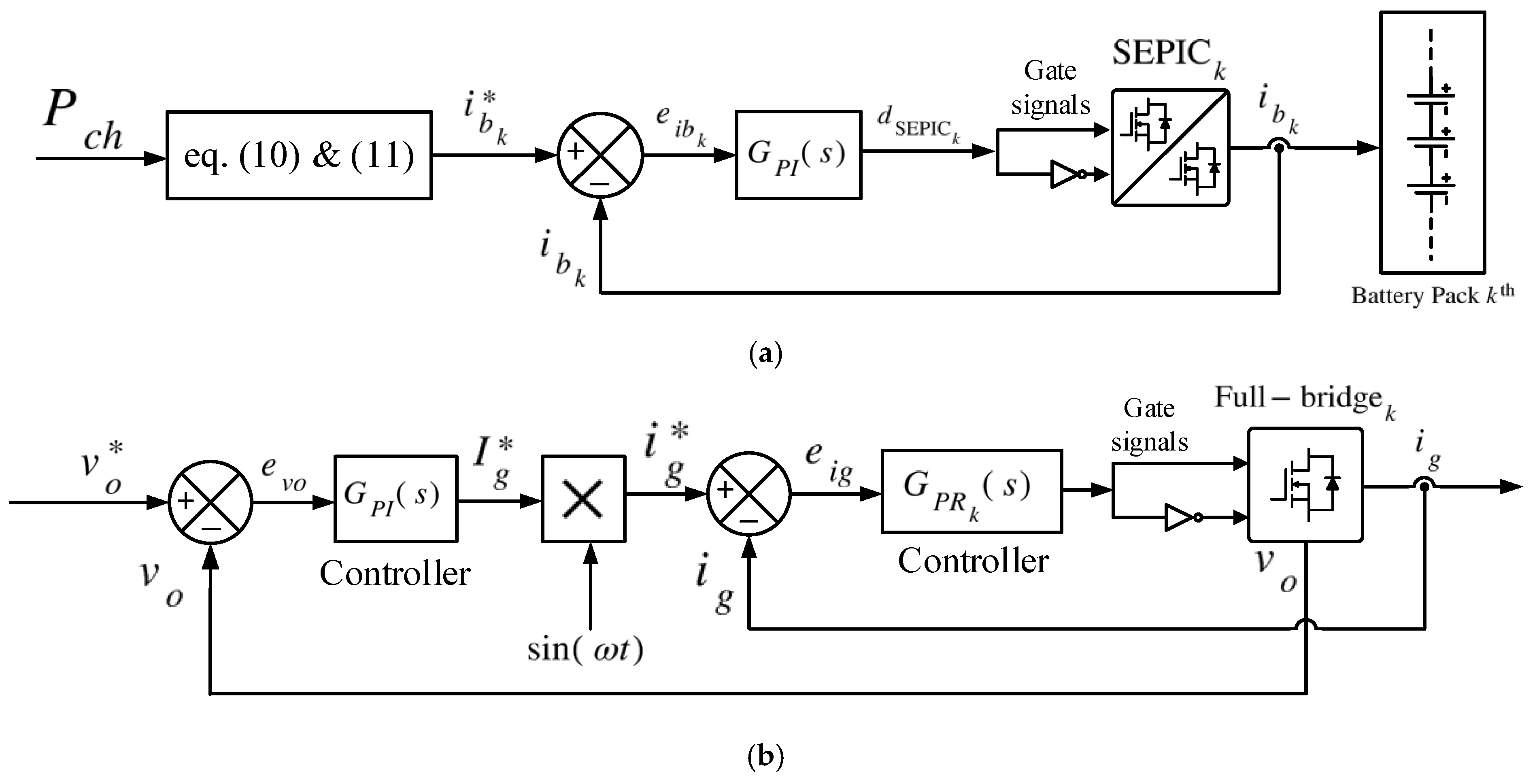
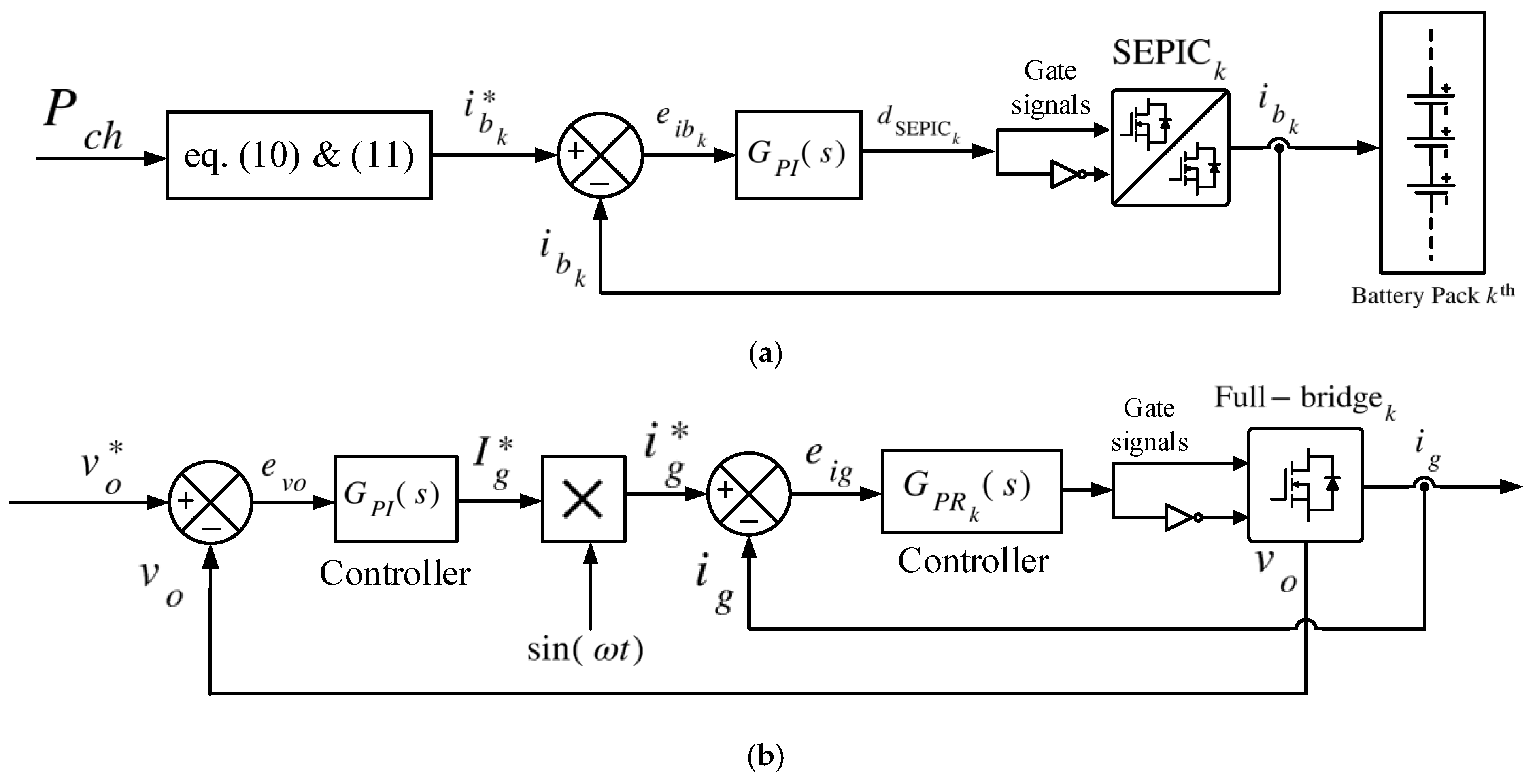
4. Charging the Battery Packs of the MSOBC
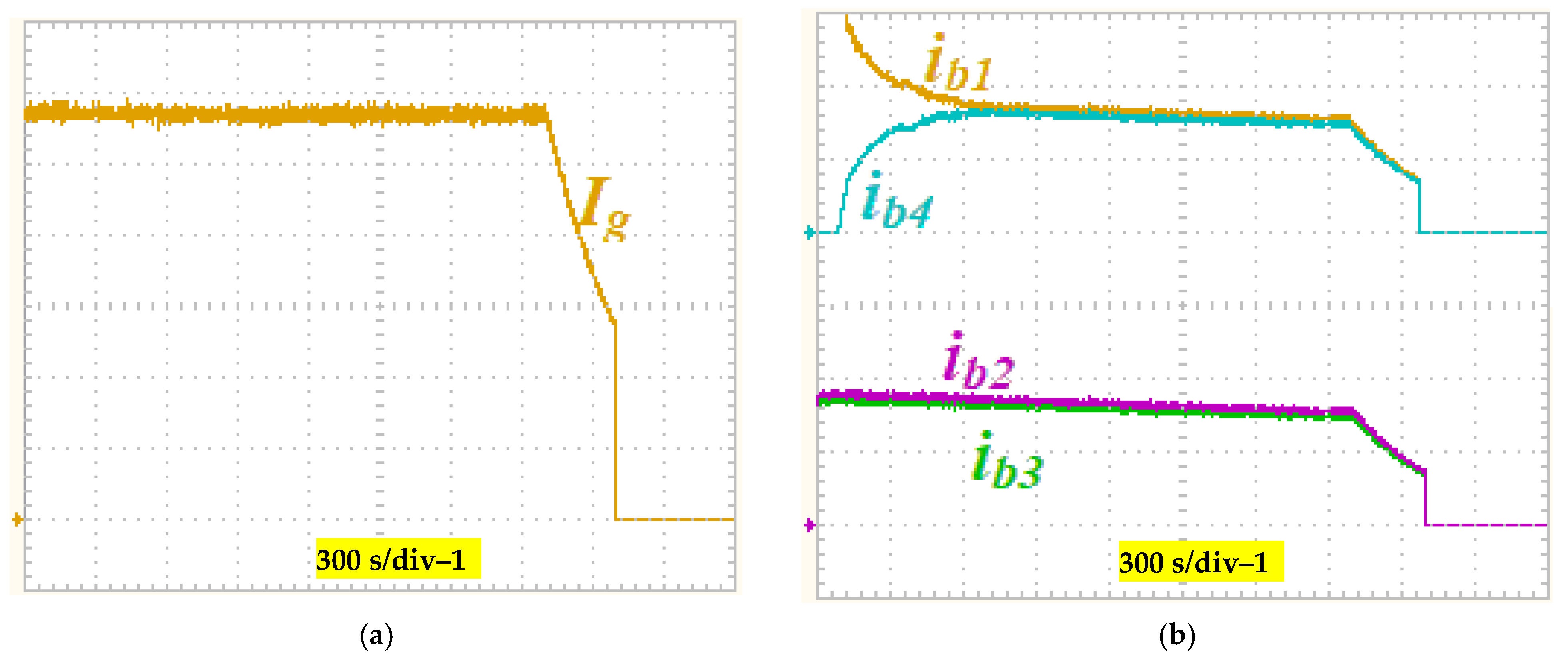
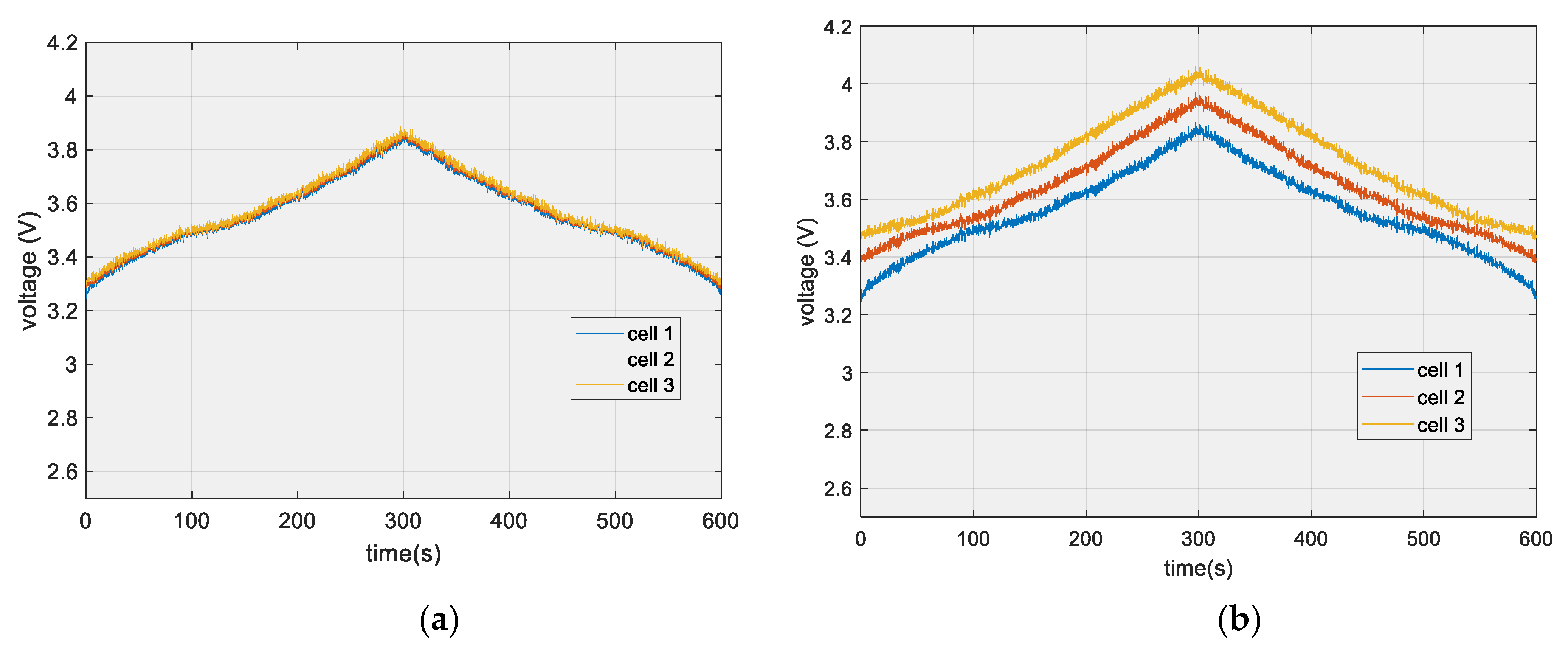
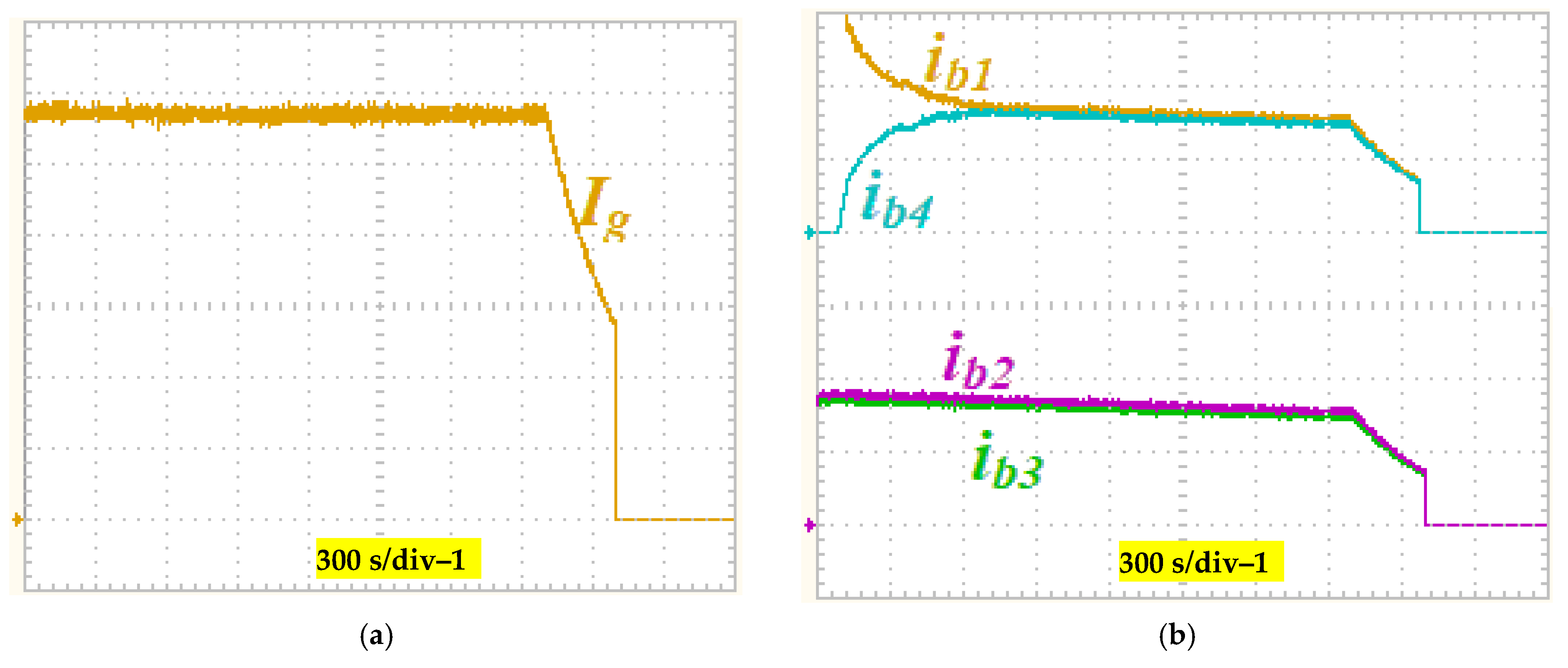
4.1. Charging Battery Packs with Non-Uniform SoCs
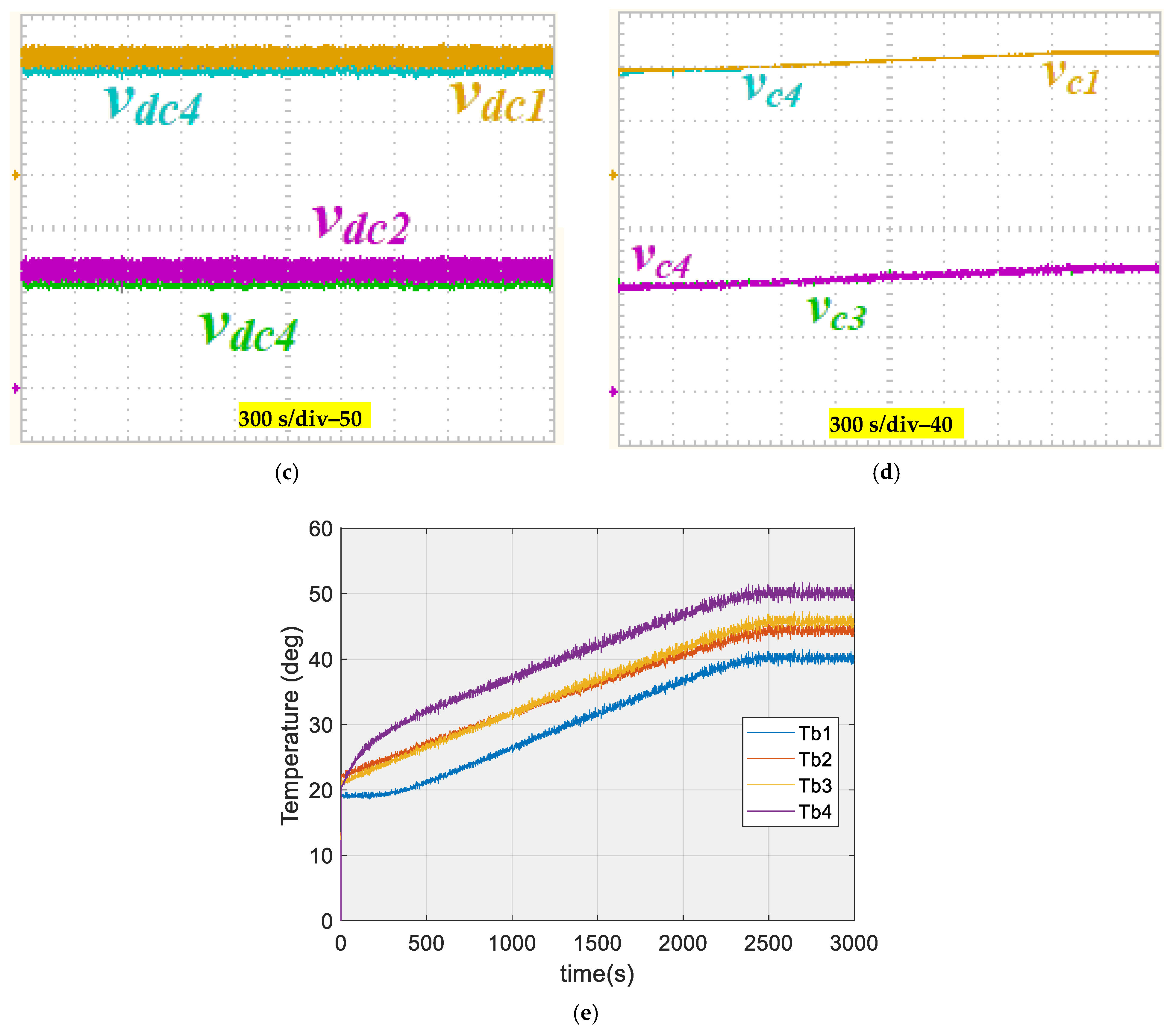
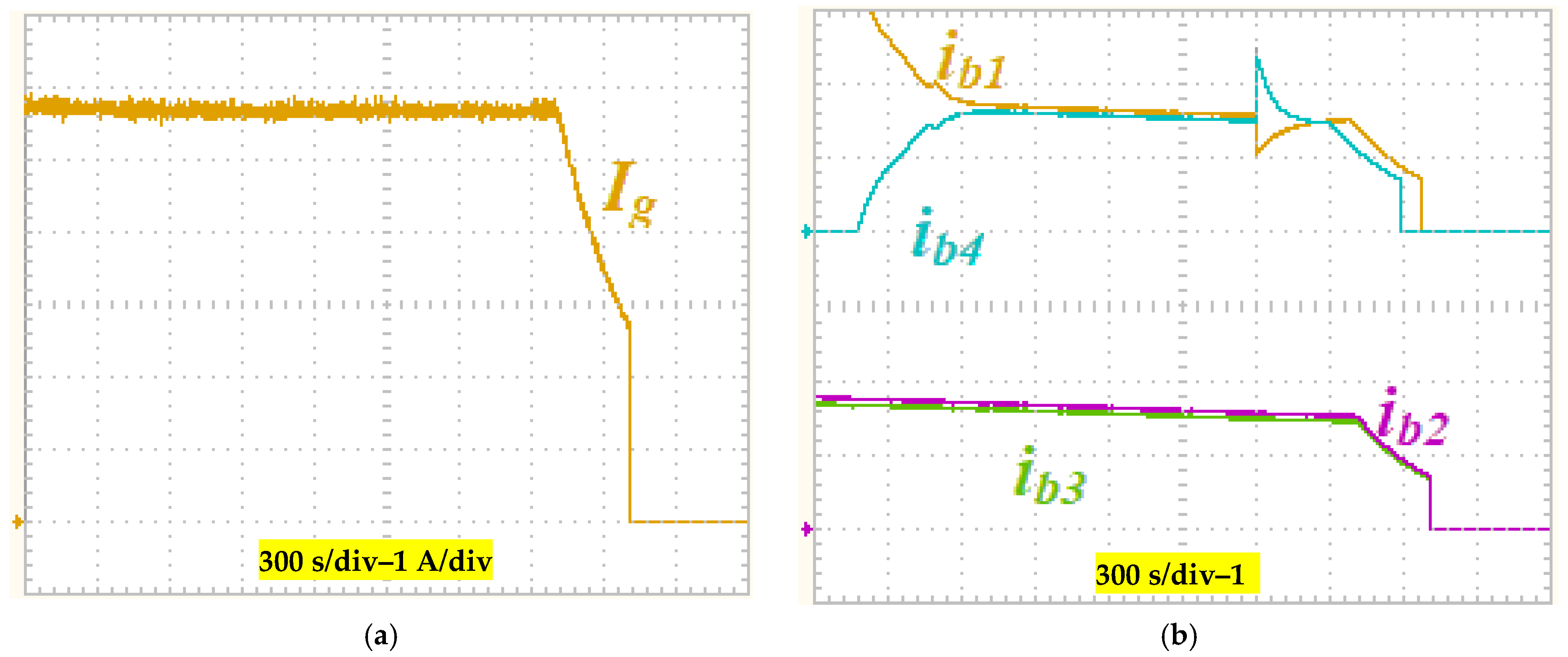
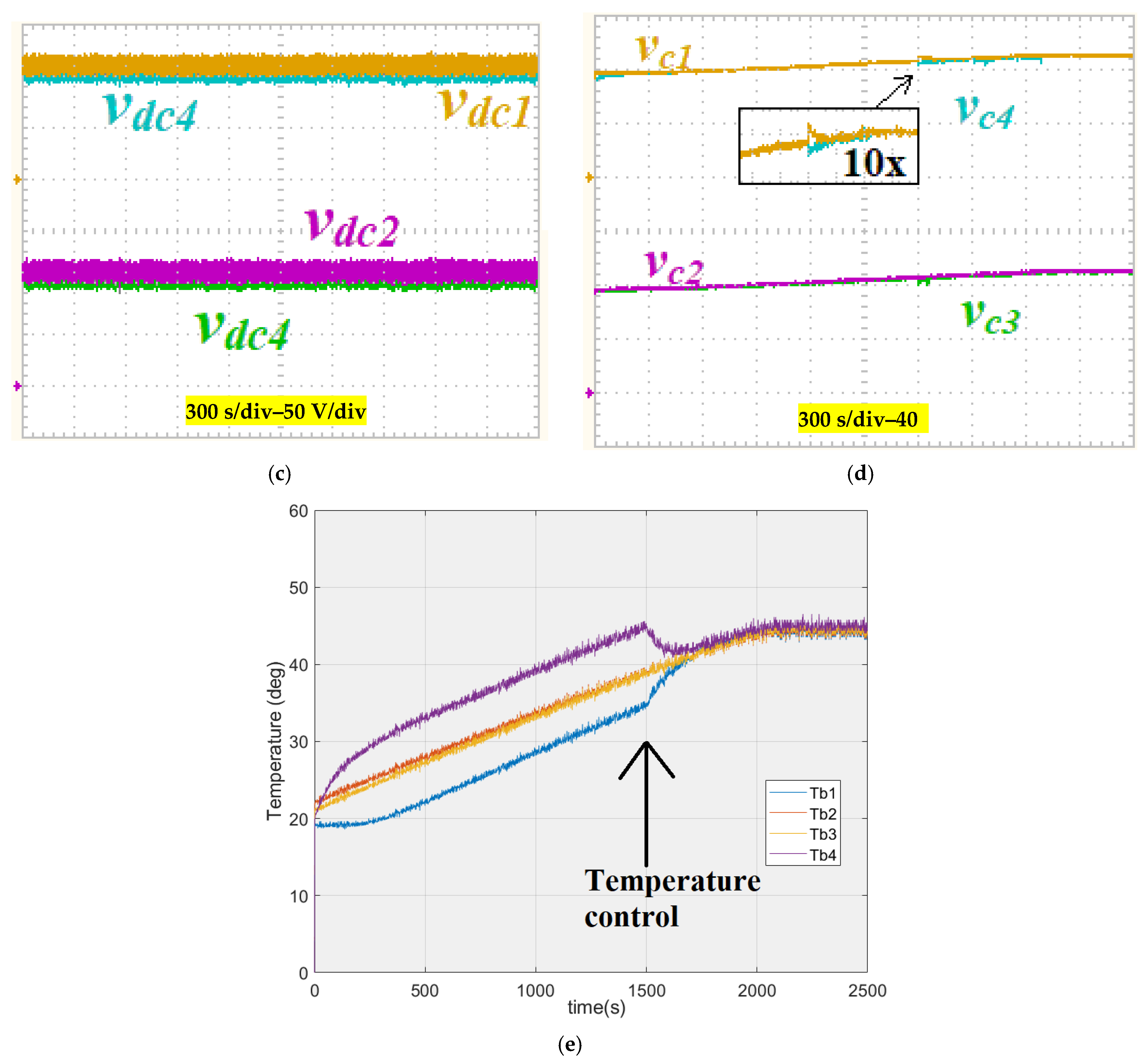
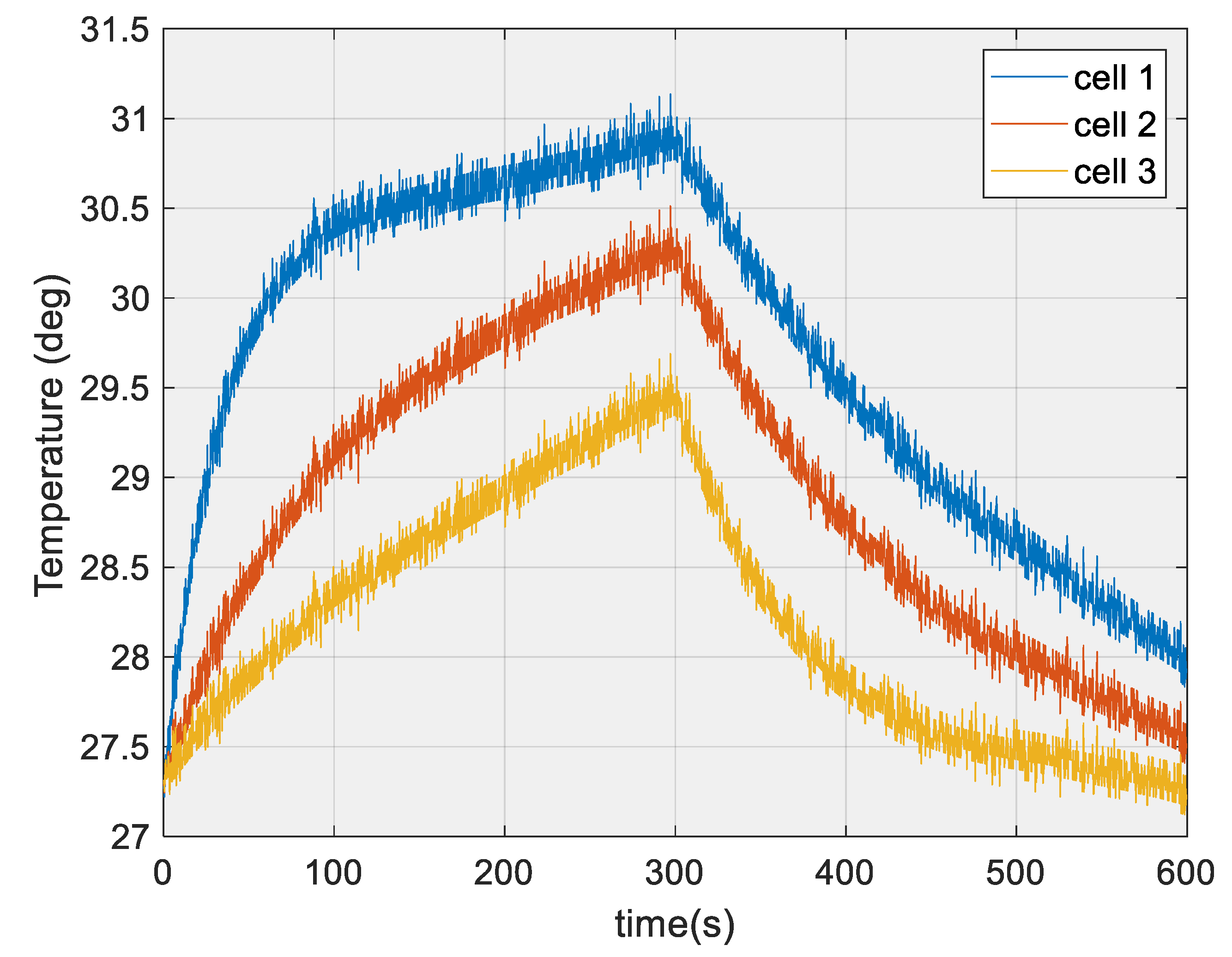
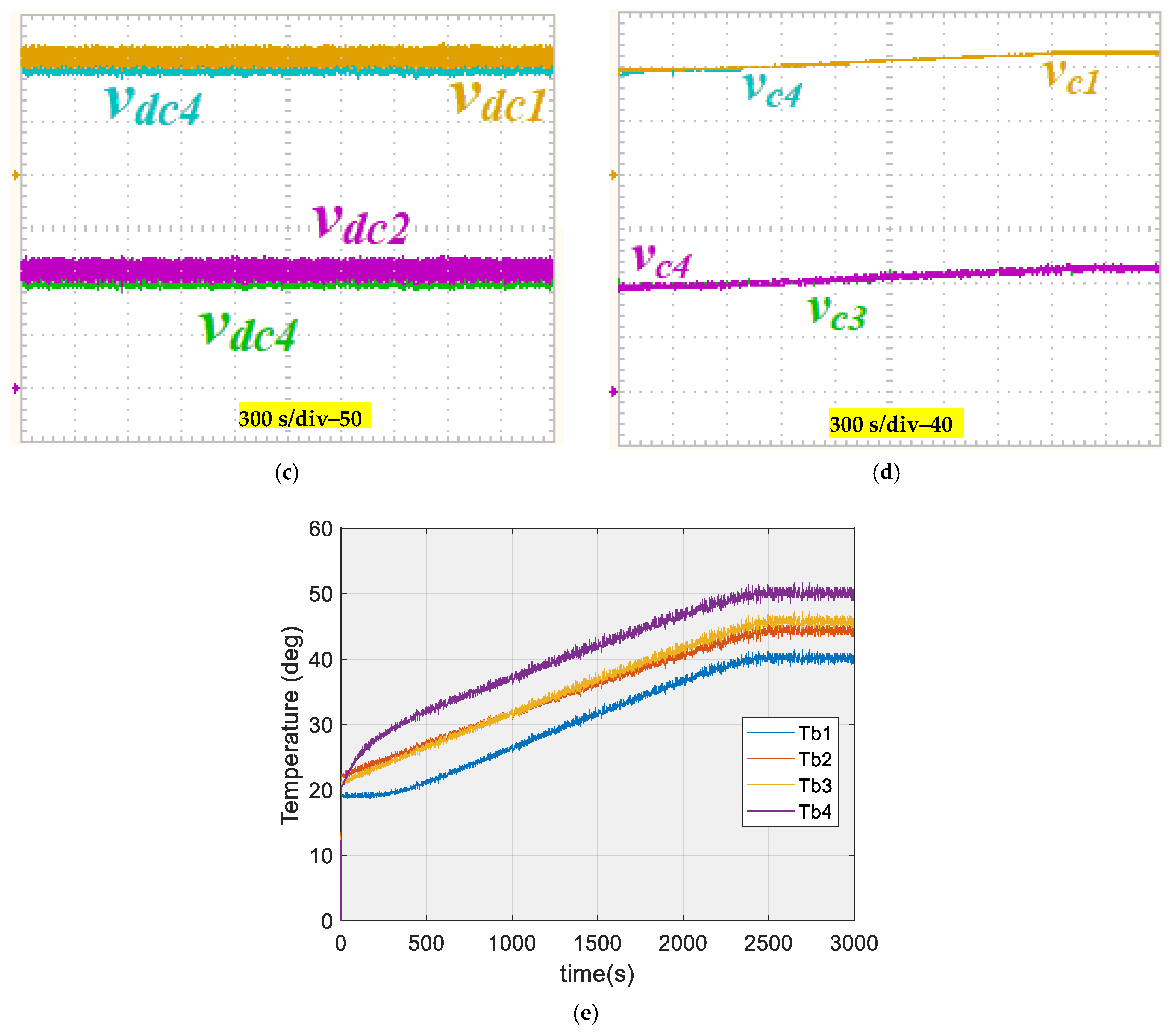
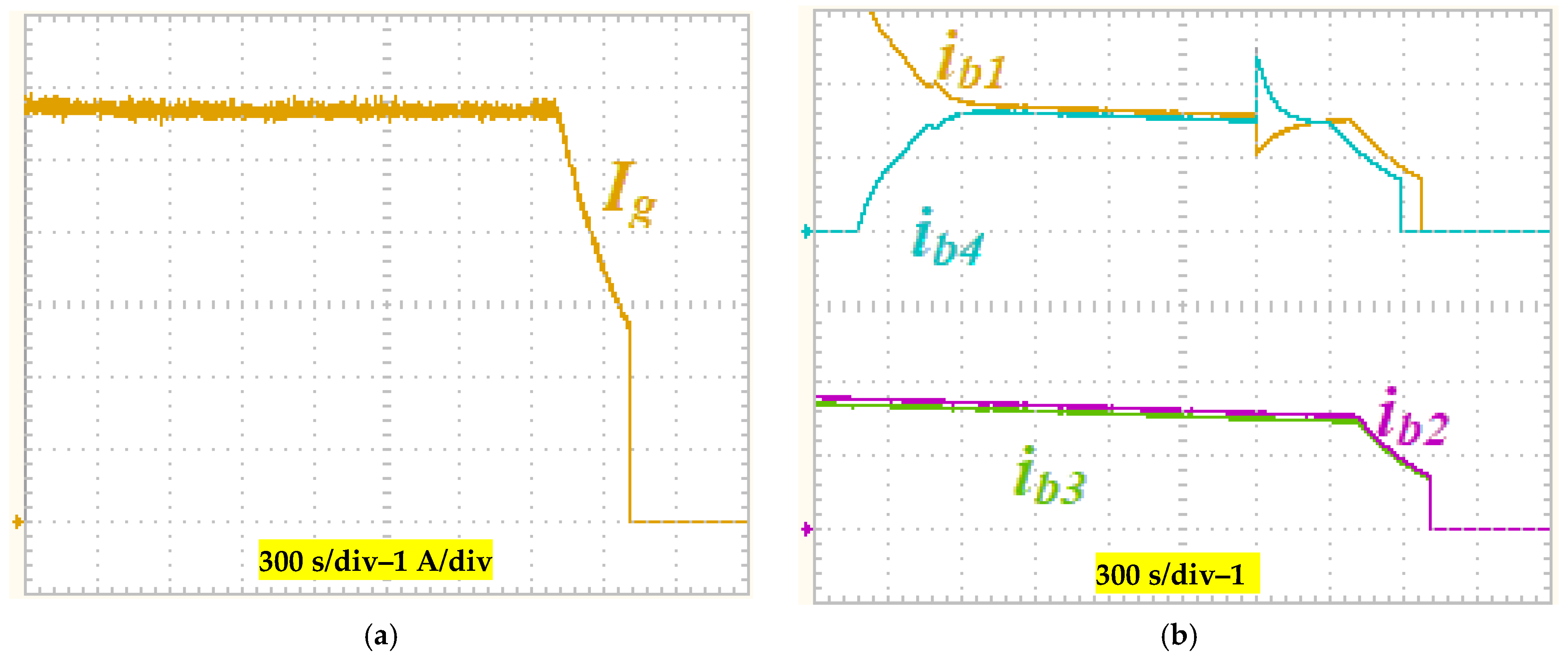
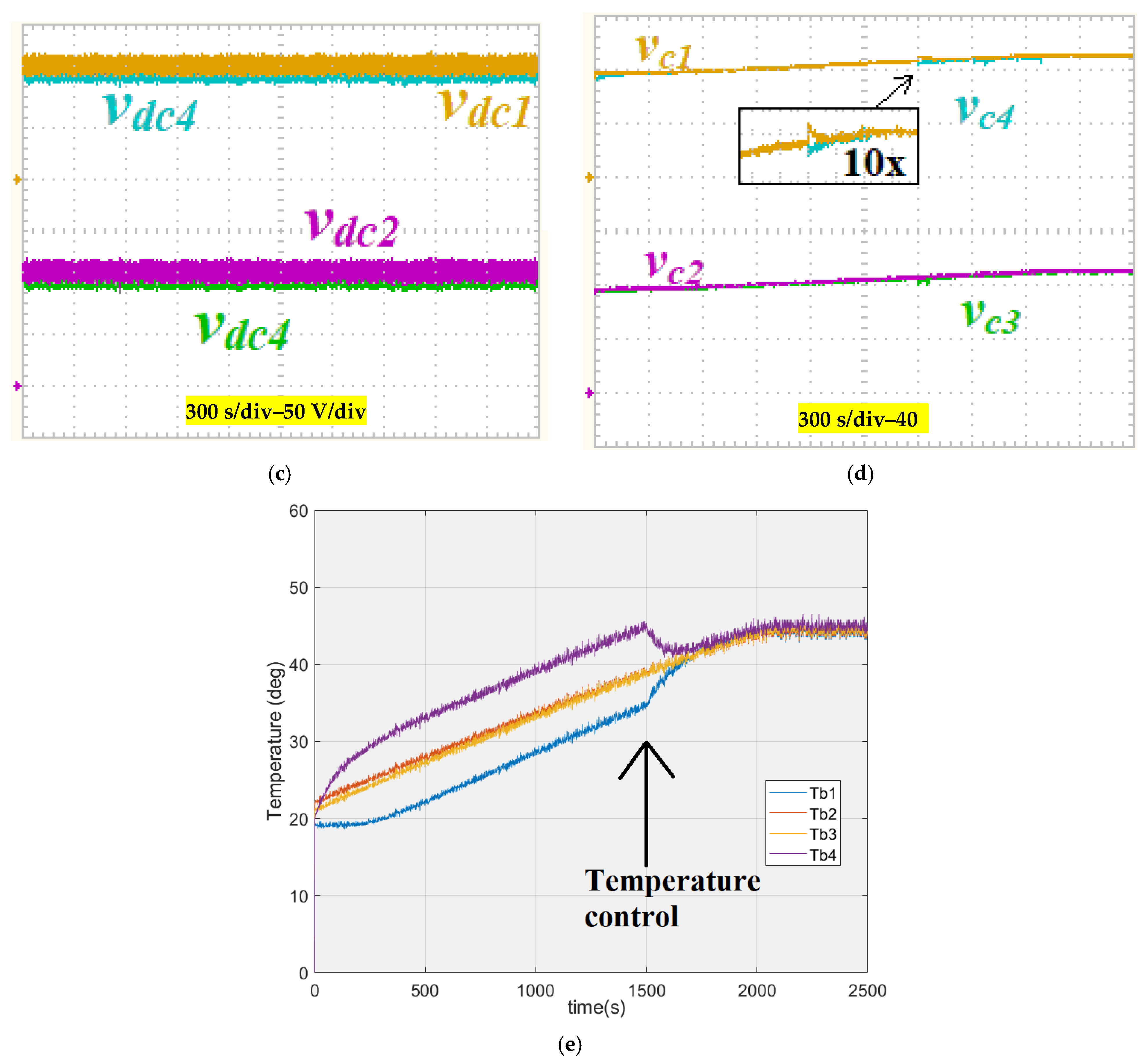
4.2. Charging Battery Packs According to Temperature
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- The European Green Deal. Available online: https://commission.europa.eu/strategy-and-policy/priorities-2019-2024/european-green-deal_en (accessed on 25 October 2023).
- Szumska, E.M. Electric Vehicle Charging Infrastructure along Highways in the EU. Energies 2023, 16, 895. [Google Scholar] [CrossRef]
- Bayani, R.; Soofi, A.F.; Waseem, M.; Manshadi, S.D. Impact of Transportation Electrification on the Electricity Grid—A Review. Vehicles 2022, 4, 1042–1079. [Google Scholar] [CrossRef]
- Tamba, M.; Krause, J.; Weitzel, M.; Ioan, R.; Duboz, L.; Grosso, M.; Vandyck, T. Economy-wide impacts of road transport electrification in the EU. Technol. Forecast. Soc. Chang. 2022, 182, 121803. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.; Dai, F.; Cai, M. Opportunities and challenges of high-energy lithium metal batteries for electric vehicle applications. ACS Energy Lett. 2020, 5, 3140–3151. [Google Scholar] [CrossRef]
- Pradhan, R.; Keshmiri, N.; Emadi, A. On-Board Chargers for High-Voltage Electric Vehicle Powertrains: Future Trends and Challenges. IEEE Open J. Power Electron. 2023, 4, 189–207. [Google Scholar] [CrossRef]
- Amry, Y.; Elbouchikhi, E.; Le Gall, F.; Ghogho, M.; El Hani, S. Electric vehicle traction drives and charging station power electronics: Current status and challenges. Energies 2022, 15, 6037. [Google Scholar] [CrossRef]
- Alanazi, F. Electric Vehicles: Benefits, Challenges, and Potential Solutions for Widespread Adaptation. Appl. Sci. 2023, 13, 6016. [Google Scholar] [CrossRef]
- IEA. Global EV Outlook 2022: Securing Supplies for an Electric Future, Paris. 2022. Available online: https://www.iea.org/reports/global-ev-outlook-2022.pdf (accessed on 11 September 2023).
- Tian, H.; Qin, P.; Li, K.; Zhao, Z. A review of the state of health for lithium-ion batteries: Research status and suggestions. J. Clean. Prod. 2020, 261, 120813. [Google Scholar] [CrossRef]
- Wu, L.; Lyu, Z.; Huang, Z.; Zhang, C.; Wei, C. Physics-based battery SOC estimation methods: Recent advances and future perspectives. J. Energy Chem. 2023, 89, 27–40. [Google Scholar] [CrossRef]
- Rahimi-Eichi, H.; Ojha, U.; Baronti, F.; Chow, M.Y. Battery management system: An overview of its application in the smart grid and electric vehicles. IEEE Ind. Electron. Mag. 2013, 7, 4–16. [Google Scholar] [CrossRef]
- IEA. Global EV Outlook 2023: Catching Up with Climate Ambitions. 2023. Available online: https://iea.blob.core.windows.net/assets/dacf14d2-eabc-498a-8263-9f97fd5dc327/GEVO2023.pdf (accessed on 21 October 2023).
- Yilmaz, M.; Krein, P.T. Review of battery charger topologies, charging power levels, and infrastructure for plug-in electric and hybrid vehicles. IEEE Trans. Power Electron. 2012, 28, 2151–2169. [Google Scholar] [CrossRef]
- Acharige, S.S.; Haque, M.E.; Arif, M.T.; Hosseinzadeh, N.; Hasan, K.N.; Oo, A.M.T. Review of electric vehicle charging technologies, standards, architectures, and converter configurations. IEEE Access 2023, 11, 41218–41255. [Google Scholar] [CrossRef]
- Safayatullah, M.; Elrais, M.T.; Ghosh, S.; Rezaii, R.; Batarseh, I. A comprehensive review of power converter topologies and control methods for electric vehicle fast charging applications. IEEE Access 2022, 10, 40753–40793. [Google Scholar] [CrossRef]
- Wouters, H.; Martinez, W. Bidirectional On-Board Chargers for Electric Vehicles: State-of-the-Art and Future Trends. IEEE Trans. Power Electron. 2023, 9, 51501–51518. [Google Scholar]
- Nasr Esfahani, F.; Darwish, A.; Williams, B.W. Power Converter Topologies for Grid-Tied Solar Photovoltaic (PV) Powered Electric Vehicles (EVs)—A Comprehensive Review. Energies 2022, 15, 4648. [Google Scholar] [CrossRef]
- Delmote, J. Accelerating to net zero: Redefining energy and mobility; Elia group’s vision on E-mobility. In Proceedings of the 5th E-Mobility Power System Integration Symposium (EMOB 2021), Hybrid Conference, Germany, 27 September 2021; pp. 1–10. [Google Scholar]
- Pescetto, P.; Cruz, M.F.T.; Stella, F.; Pellegrino, G. Galvanically Isolated On-Board Charger Fully Integrated With 6-Phase Traction Motor Drives. IEEE Access 2023, 11, 26059–26069. [Google Scholar] [CrossRef]
- Patel, M.R.; Shah, A.P.; Chudasama, K.J.; Jadhav, G.J. A Review of EV Converters Performance during V2G/G2V mode of Operation. In Proceedings of the 2022 3rd International Conference for Emerging Technology (INCET), Belgaum, India, 27–29 May 2022; pp. 1–7. [Google Scholar]
- Darwish, A.; Massoud, A.; Holliday, D.; Ahmed, S.; Williams, B. Generation, performance evaluation and control design of single-phase differential-mode buck–boost current-source inverters. IET Renew. Power Gener. 2016, 10, 916–927. [Google Scholar] [CrossRef]
- Badawy, A.D. Current Source DC-DC and DC-AC Converters with Continuous Energy Flow By. Ph.D. Thesis, University of Strathclyde, Glasgow, UK, 2015. [Google Scholar]
- Maroti, P.K.; Padmanaban, S.; Bhaskar, M.S.; Ramachandaramurthy, V.K.; Blaabjerg, F. The state-of-the-art of power electronics converters configurations in electric vehicle technologies. Power Electron. Devices Compon. 2022, 1, 100001. [Google Scholar] [CrossRef]
- Monteiro, V.; Afonso, J.A.; Afonso, J.L. Bidirectional Power Converters for EV Battery Chargers. Energies 2023, 16, 1694. [Google Scholar] [CrossRef]
- Ronanki, D.; Williamson, S.S. Modular multilevel converters for transportation electrification: Challenges and opportunities. IEEE Trans. Transp. Electrif. 2018, 4, 399–407. [Google Scholar] [CrossRef]
- Darwish, A.; Holliday, D.; Finney, S. Operation and control design of an input conversion scheme for offshore DC wind systems. IET Power Electron. 2017, 10, 2092–2103. [Google Scholar] [CrossRef]
- Nasr Esfahani, F.; Darwish, A.; Massoud, A. PV/Battery Grid Integration Using a Modular Multilevel Isolated SEPIC-Based Converter. Energies 2022, 15, 5462. [Google Scholar] [CrossRef]
- Darwish, A.; Elserougi, A.; Abdel-Khalik, A.S.; Ahmed, S.; Massoud, A.; Holliday, D.; Williams, B.W. A single-stage three-phase DC/AC inverter based on Cuk converter for PV application. In Proceedings of the 2013 7th IEEE GCC Conference and Exhibition (GCC), Doha, Qatar, 17–20 November 2013; pp. 384–389. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | Parameter | Value |
|---|---|---|
| Battery system | Cell | Li-ion 18650: 3.6 V–2.5 Ah |
| Pack | Li8P25RT = 8 cells in parallel (20 Ah in total) | |
| Packs per segment | p = 22 packs | |
| Number of segments per phase | m = 4 | |
| SEPIC converter | Switching frequency | 50 kHz |
| Inductors | L1 = L2 = 1 mH | |
| Capacitors | C1 = C2 = 20 μF Co = 50 μF | |
| Motor system | Type | PMSM |
| Peak power | 68 kW | |
| Maximum current | 200 A | |
| Maximum torque | 140 N·m | |
| Efficiency | 92–98% | |
| Inductances | Ld/Lq = 125/130 μH | |
| Number of poles | 10 | |
| Wheel radius | r = 30 cm | |
| Gear box ratio | G = 2.5 | |
| Control and measurements | Digital Signal Processor (DSP) | TMS320F28335 |
| Voltage transducers | LEM 25-P | |
| Current transducers | LEM HTFS 800-P | |
| Speed transducers | SS360NT |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nasr Esfahani, F.; Darwish, A.; Ma, X. Design and Control of a Modular Integrated On-Board Battery Charger for EV Applications with Cell Balancing. Batteries 2024, 10, 17. https://doi.org/10.3390/batteries10010017
Nasr Esfahani F, Darwish A, Ma X. Design and Control of a Modular Integrated On-Board Battery Charger for EV Applications with Cell Balancing. Batteries. 2024; 10(1):17. https://doi.org/10.3390/batteries10010017
Chicago/Turabian StyleNasr Esfahani, Fatemeh, Ahmed Darwish, and Xiandong Ma. 2024. "Design and Control of a Modular Integrated On-Board Battery Charger for EV Applications with Cell Balancing" Batteries 10, no. 1: 17. https://doi.org/10.3390/batteries10010017
APA StyleNasr Esfahani, F., Darwish, A., & Ma, X. (2024). Design and Control of a Modular Integrated On-Board Battery Charger for EV Applications with Cell Balancing. Batteries, 10(1), 17. https://doi.org/10.3390/batteries10010017