
Development of an Optical System Based on Spectral Imaging Used for a Slug Control Robot

 , and
, and
Abstract
:1. Introduction
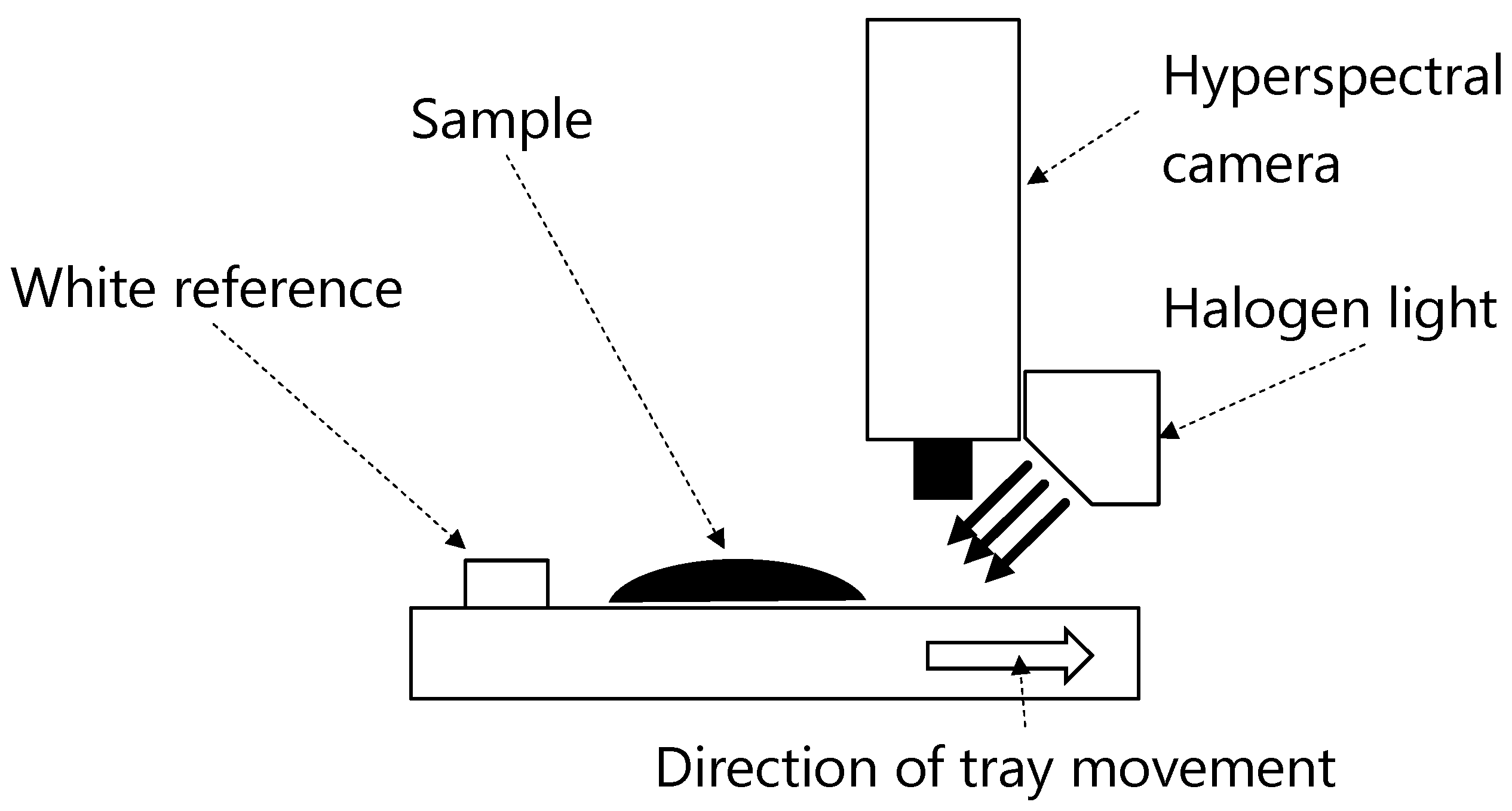
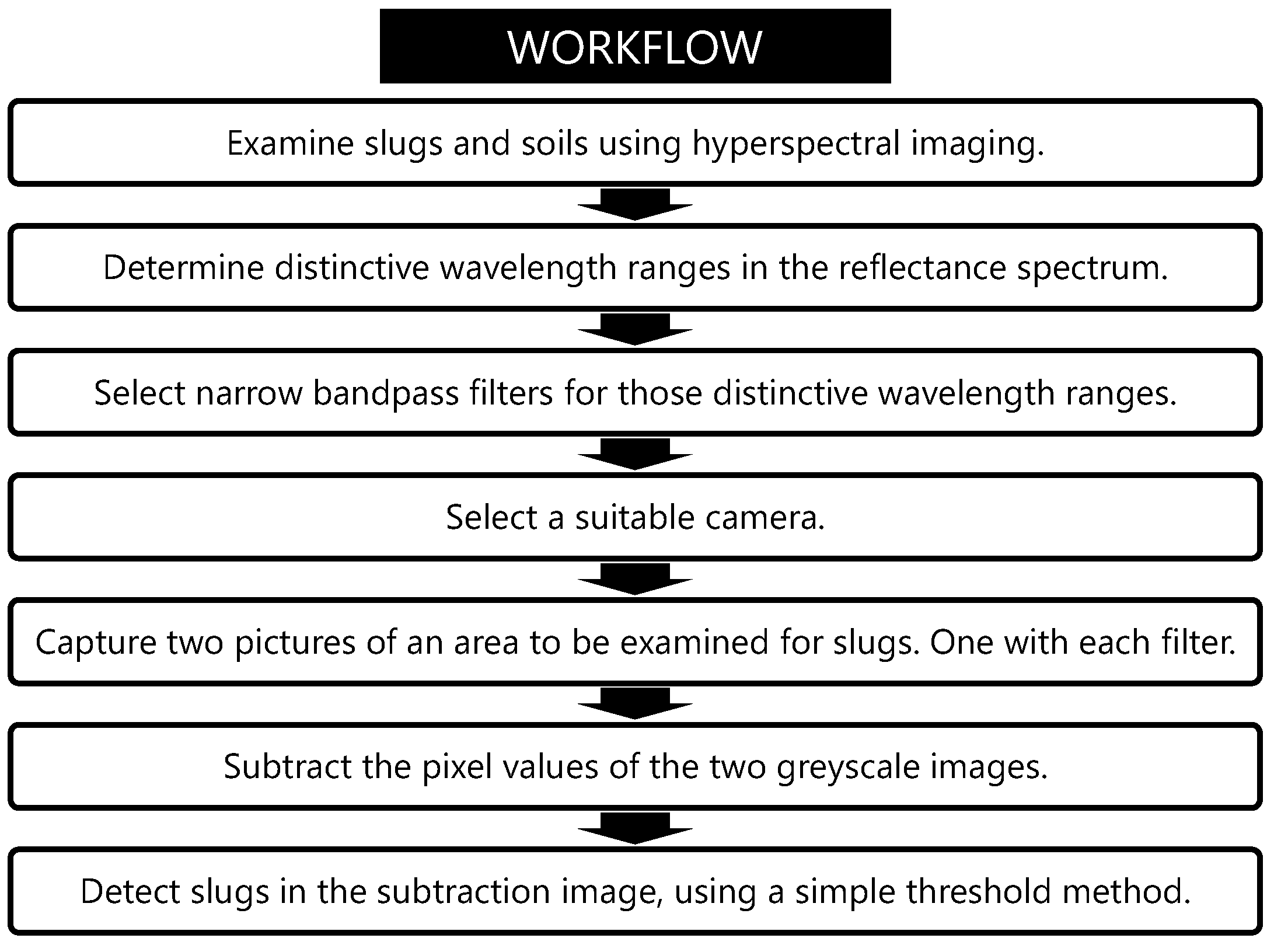
2. Materials and Methods
3. Results
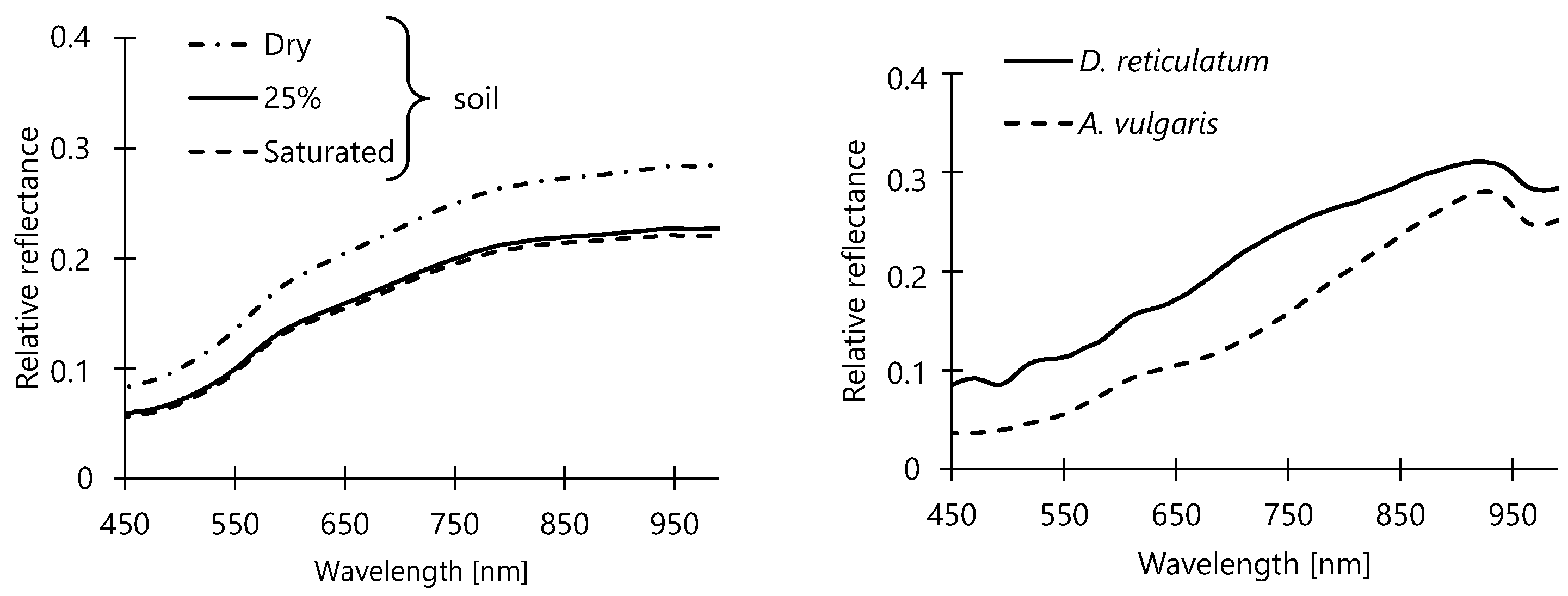
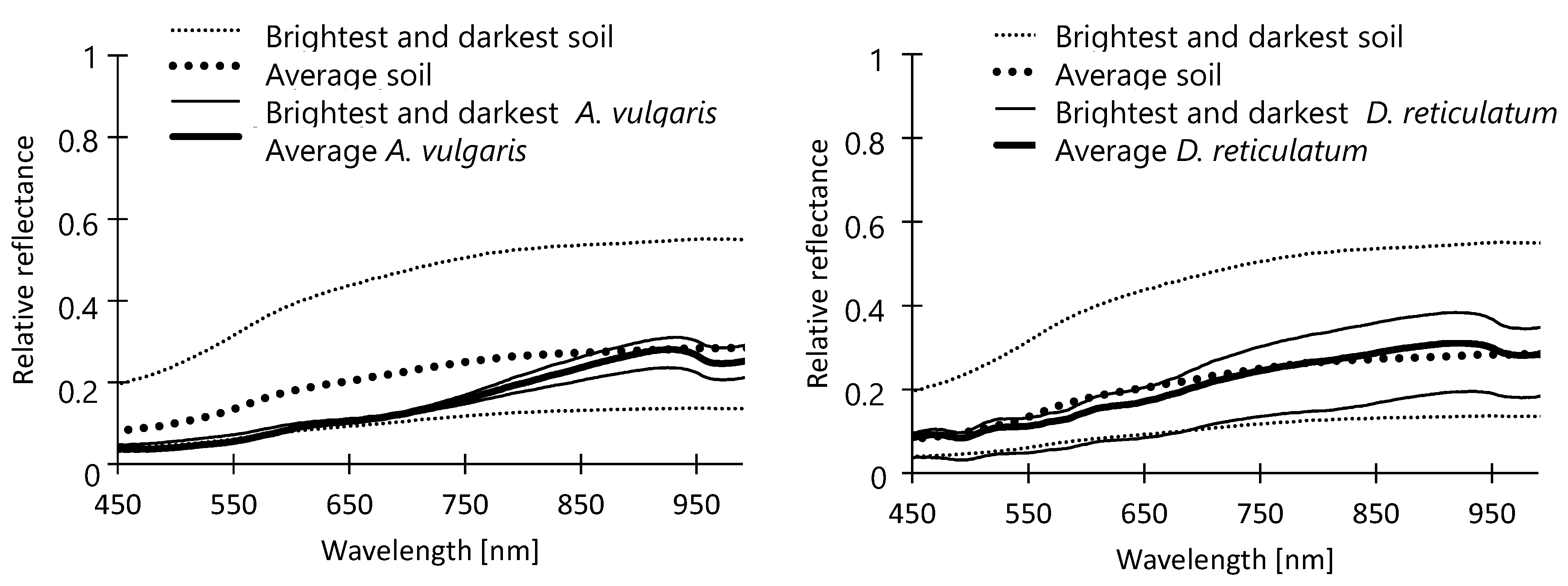
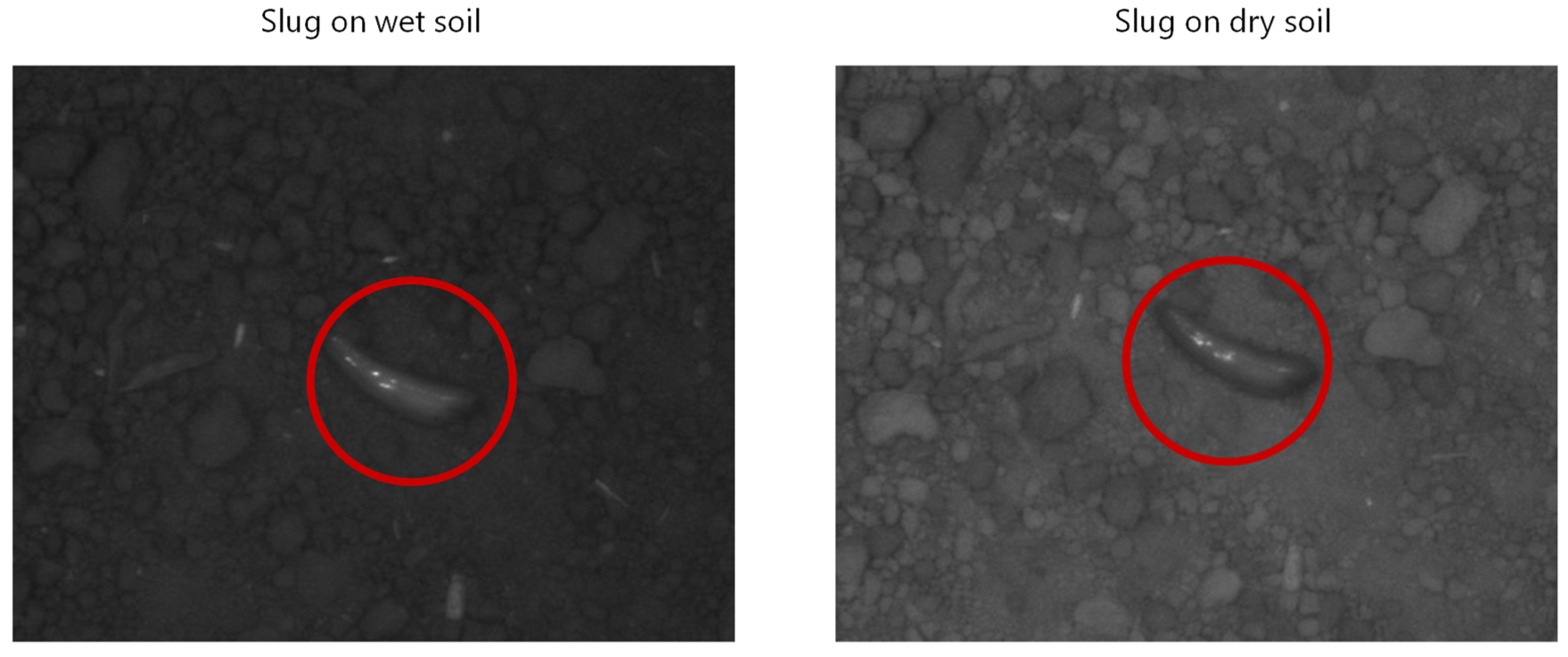
3.1. Measured Reflectance of Soil and Slug
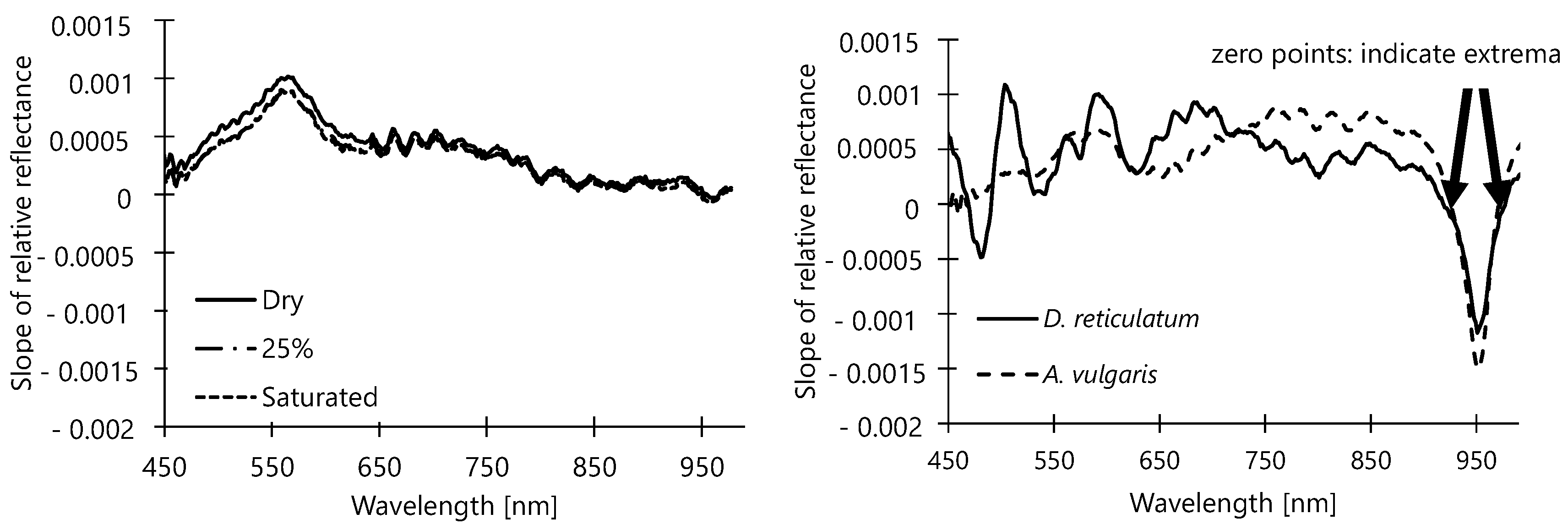
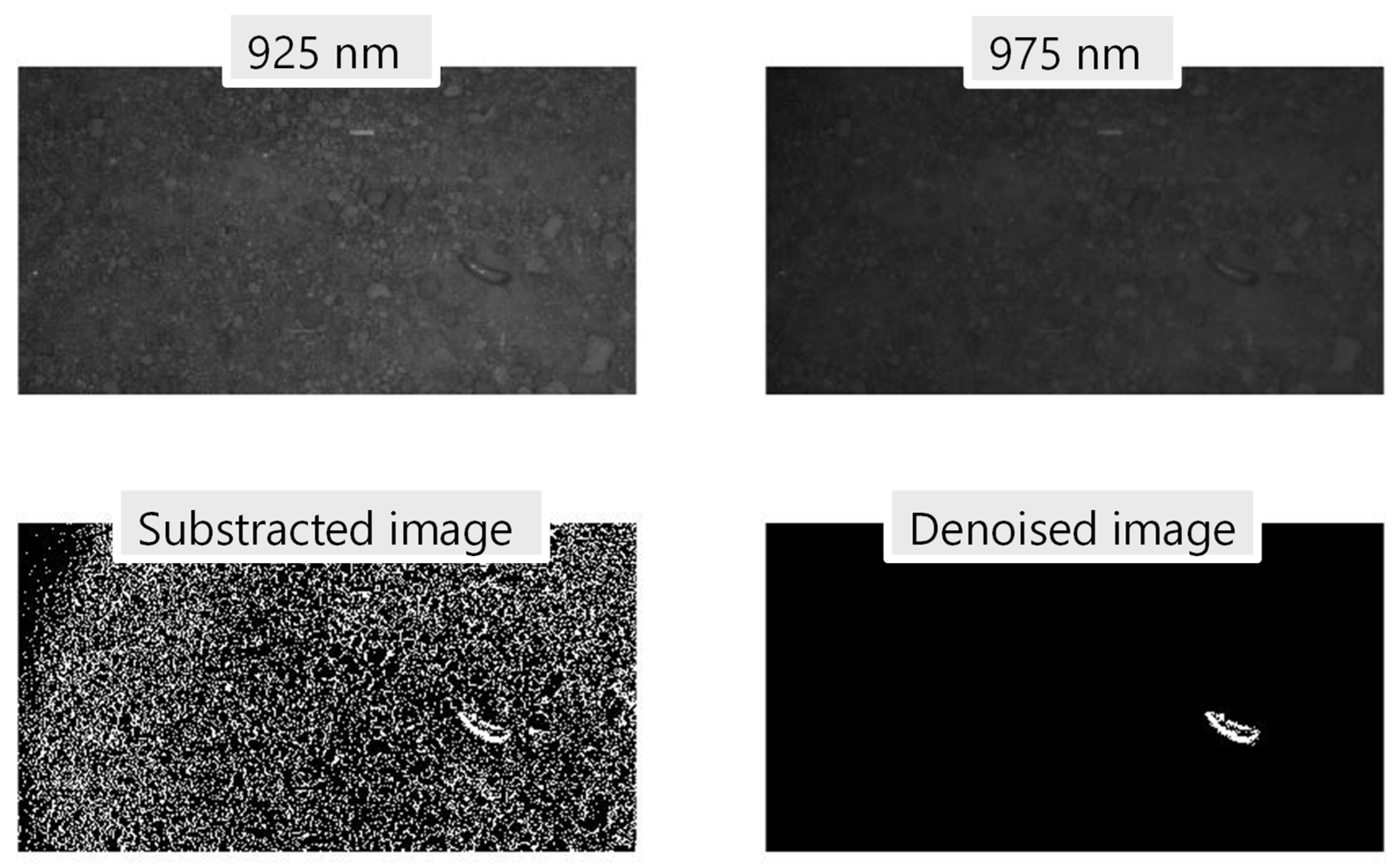
3.2. Calculation of Gradients by a Derivation Test
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Glen, D.M.; Moens, R. Agriolimacidae, Arionidae and Milacidae as pests in west European cereals. In Molluscs as Crop Pests; Barker, G.M., Ed.; CABI Publishing: Wallingford, UK, 2002; pp. 271–300. [Google Scholar]
- Moens, R.; Glen, D.M. Agriolimacidae, Arionidae and Milacidae as pests in west European oilseed rape. In Molluscs as Crop Pests; Barker, G.M., Ed.; CABI Publishing: Wallingford, UK, 2002; pp. 425–439. [Google Scholar]
- Barker, G.M. Molluscs as Crop Pests; CABI Publishing: Wallingford, UK, 2002. [Google Scholar]
- Nash, M.A.; Thomson, L.J.; Hoffmann, A.A. Slug control in Australian canola, monitoring, mulluscicidal baits and economic thresholds. Pest Manag. Sci. 2007, 63, 851–859. [Google Scholar] [CrossRef]
- South, A. Terrestrial Slugs, Biology Ecology and Control; Chapman and Hall: London, UK, 1992. [Google Scholar]
- Bailey, S.E.R. Molluscicidal baits for control of terrestrial gastropods. In Molluscs as Crop Pests; Barker, G.M., Ed.; CABI Publishing: Wallingford, UK, 2002; pp. 33–54. [Google Scholar]
- Gonzalez-de-Santos, P.; Ribeiro, A.; Fernandez-Quintanilla, C.; Lopez-Granados, F.; Brandstoetter, M.; Tomic, S.; Pedrazzi, S.; Peruzzi, A.; Pajares, G.; Kaplanis, G.; et al. Fleets of robots for environmentally-safe pest control in agriculture. Precis. Agric. 2017, 18, 574–614. [Google Scholar] [CrossRef]
- Kelly, I.; Melhuish, C. A slug detection system for the slug bot. In Proceedings of the 3rd British Conference on Autonomous Mobile Robots, Nashua, NH, USA, 21–26 May 2001. [Google Scholar]
- Van Straten, G. Field robot event, Wageningen 5–6 June 2003. Comput. Electron. Agric. 2003, 42, 51–58. [Google Scholar] [CrossRef]
- Blackmore, S.; Stout, B.; Wang, M.; Runov, B. Robotic agriculture—The future of agricultural mechanisation. In Proceedings of the 5th European Conference on Precision Agriculture, Uppsala, Sweden, 8–11 June 2005; pp. 621–628. [Google Scholar]
- Bechar, A.; Vigneault, C. Agricultural robots for field operations: Concept and components. Biosyst. Eng. 2016, 149, 94–111. [Google Scholar] [CrossRef]
- Greenman, J.; Holland, O.; Kelly, I.; Kendall, K.; McFarland, D.; Meluish, C. Towards robot autonomy in the natural world: A robot in predator’s clothing. Mechatronics 2003, 13, 195–228. [Google Scholar] [CrossRef]
- Yuan, L.; Yan, P.; Han, W.; Huang, Y.; Wang, B.; Zhang, J.; Zhang, H.; Bao, Z. Detection of anthracnose in tea plants based on hyperspectral imaging. Comput. Electron. Agric. 2019, 167, 105039. [Google Scholar] [CrossRef]
- Abdulridha, J.; Ampatzidis, Y.; Roberts, P.; Kakarla, S.C. Detecting powdery mildew disease in squash at different stages using UAV-based hyperspectral imaging and artificial intelligence. Biosyst. Eng. 2020, 197, 135–148. [Google Scholar] [CrossRef]
- Fan, Y.; Wang, T.; Qiu, Z.; Peng, J.; Zhang, C.; He, Y. Fast Detection of Striped Stem-Borer (Chilo suppressalis Walker) Infested Rice Seedling Based on Visible/Near-Infrared Hyperspectral Imaging System. Sensors 2017, 17, 2470. [Google Scholar] [CrossRef] [PubMed]
- Okamoto, H.; Murata, T.; Kataoka, T.; Hata, S.-I. Plant classification for weed detection using hyperspectral imaging with wavelet analysis. Weed Biol. Manag. 2007, 7, 31–37. [Google Scholar] [CrossRef]
- Barbedo, J. Detecting and classifying pests in crops using proximal images and machine learning: A review. Artif. Intell. 2020, 1, 312–328. [Google Scholar] [CrossRef]
- Liu, H.; Chahl, J. Proximal detecting invertebrate pests on crops using a deep residual convolutional neural network trained by virtual images. Artif. Intell. Agric. 2021, 5, 13–23. [Google Scholar] [CrossRef]
- Liu, H.; Chahl, J. A multispectral machine vision system for invertebrate detection on green leaves. Comput. Elecronics Agric. 2018, 150, 279–288. [Google Scholar] [CrossRef]
- Martineau, M.; Conte, D.; Raveaux, R.; Arnault, I.; Munier, D.; Venturini, G. A survey on image-based insect classification. Pattern Recognit. 2017, 65, 273–284. [Google Scholar] [CrossRef] [Green Version]
- Schulte, E.E.; Hopkins, B.G. Estimation of Soil Organic Matter by Weight Loss-On-Ignition. In Soil Organic Matter: Analysis and Interpretation; Magdoff, F.R., Ed.; SSSA Special Publication: Madison, WI, USA, 1996; Volume 46. [Google Scholar]
- DIN EN ISO 11274: Soil Quality—Determination of the Water-Retention Characteristic—Laboratory Methods. 2018. Available online: https://www.iso.org/obp/ui/#iso:std:iso:11274:ed-2:v1:en (accessed on 1 May 2021).
- Crichton, S.O.J.; Kirchner, S.M.; Porley, V.; Retz, S.; von Gersdorff, G.; Hensel, O.; Weygandt, M.; Sturm, B. Classification of organic beef Freshness using VNIR hyperspectral imaging. Meat Sci. 2017, 129, 20–27. [Google Scholar] [CrossRef]
- Crichton, S.O.J.; Shrestha, L.; Hurlbert, A.; Sturm, B. Use of hyperspectral imaging for prediction of moisture content and chromaticity of raw and pretreated apple slices during convection drying. Dry. Technol. 2017, 36, 804–816. [Google Scholar] [CrossRef]
- Amjad, W.; Crichton, S.O.J.; Munir, A.; Hensel, O.; Sturm, B. Hyperspectral imaging for determination of potato slices moisture content and chromaticity during convective hot airdrying process. Biosyst. Eng. 2018, 166, 170–183. [Google Scholar] [CrossRef]
- Scheid, H.; Schwarz, W. Elemente der Linearen Algebra und der Analysis; Springer: Heidelberg, Germany, 2009; pp. 316–322. [Google Scholar]
- Bobelyn, E.; Serban, A.-S.; Nicu, M.; Lammertyn, J.; Nicolai, B.; Saeys, W. Postharvest quality of apple predicted by NIR-spectroscopy: Study of the effect of biological variability on spectra and model performance. Postharvest Biol. Technol. 2009, 55, 133–143. [Google Scholar] [CrossRef]
- Cen, H.; Lu, R.; Mendoza, F.; Beaudry, R.M. Relationship of the optical absorption and scattering properties with mechanical and structural properties of apple tissue. Postharvest Biol. Technol. 2013, 85, 30–38. [Google Scholar] [CrossRef]
- Lyth, M. Water-Content of Slugs (Gastropoda: Pulmonata) Maintained in Standardiesed Culture Conditions. J. Molluscan Stud. 1982, 48, 214–218. [Google Scholar]
- Ben-Dor, E.; Irons, J.R.; Epema, G.F. Soil reflectance. In Remote Sensing for the Earth Sciences, Manual of Remote Sensing; Rencz, N., Ed.; John Wiley & Sons: New York, NY, USA, 1999; pp. 111–188. [Google Scholar]
- Shepherd, K.D.; Walsh, M.G. Development of Reflectance Spectral Libraries for Characterization of Soil Properties. Soil Sci. Soc. Am. J. 2002, 66, 988–998. [Google Scholar] [CrossRef]
- Skingsley, D.R. Analysis of Pulmonate Mucus by Infrared Spectroscopy. J. Molluscan Stud. 2000, 66, 363–372. [Google Scholar] [CrossRef]
- Vasques, G.M.; Demattê, J.A.M.; Viscarra Rossel, R.A.; Ramírez-López, L.; Terra, F.S. Soil classification using visible/near-infrared diffuse reflectance spectra from multiple depths. Geoderma 2014, 223–225, 73–78. [Google Scholar] [CrossRef]
- Allgaier, C.; Albert, R. Schadschnecken, Biologie, Arten und Bekämpfung; Aid Infodienst: Bonn, Germany, 2014. [Google Scholar]
- Nasirahmadi, A.; Hensel, O.; Edward, S.; Sturm, B. Using machine vision for investigation of changes in pig proup lying patterns. Comput. Electron. Agric. 2015, 119, 184–190. [Google Scholar] [CrossRef] [Green Version]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Moisture Level of Soil Sample | Method for Sample Adjustment |
|---|---|
| Saturated | Saturated according to DIN EN ISO 11274 [22]. |
| Water content 25% | Mixed with water to a weight ratio of 25% water content. |
| Dry sample | Oven-dried and sieved into plastic cylinders. |
| Species | D. reticulatum | A. vulgaris | ||||
|---|---|---|---|---|---|---|
| Maximum | Turn. pt. | Minimum | Maximum | Turn. pt. | Minimum | |
| Mean Wavelength [nm] | 920.60 | 950.95 | 977.99 | 926.71 | 951.28 | 972.50 |
| Highest Wavelength [nm] | 931.42 | 950.95 | 981.99 | 934.67 | 952.58 | 975.44 |
| Lowest Wavelength [nm] | 910.33 | 950.95 | 975.44 | 921.68 | 950.95 | 968.90 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Höing, C.; Raut, S.; Nasirahmadi, A.; Sturm, B.; Hensel, O. Development of an Optical System Based on Spectral Imaging Used for a Slug Control Robot. Horticulturae 2022, 8, 77. https://doi.org/10.3390/horticulturae8010077
Höing C, Raut S, Nasirahmadi A, Sturm B, Hensel O. Development of an Optical System Based on Spectral Imaging Used for a Slug Control Robot. Horticulturae. 2022; 8(1):77. https://doi.org/10.3390/horticulturae8010077
Chicago/Turabian StyleHöing, Christian, Sharvari Raut, Abozar Nasirahmadi, Barbara Sturm, and Oliver Hensel. 2022. "Development of an Optical System Based on Spectral Imaging Used for a Slug Control Robot" Horticulturae 8, no. 1: 77. https://doi.org/10.3390/horticulturae8010077
APA StyleHöing, C., Raut, S., Nasirahmadi, A., Sturm, B., & Hensel, O. (2022). Development of an Optical System Based on Spectral Imaging Used for a Slug Control Robot. Horticulturae, 8(1), 77. https://doi.org/10.3390/horticulturae8010077