
CHP-Based Economic Emission Dispatch of Microgrid Using Harris Hawks Optimization




Abstract
:1. Introduction
- The HHO algorithm was implemented to analyze its effectiveness in solving the DG placement and the load dispatch problem for an MG.
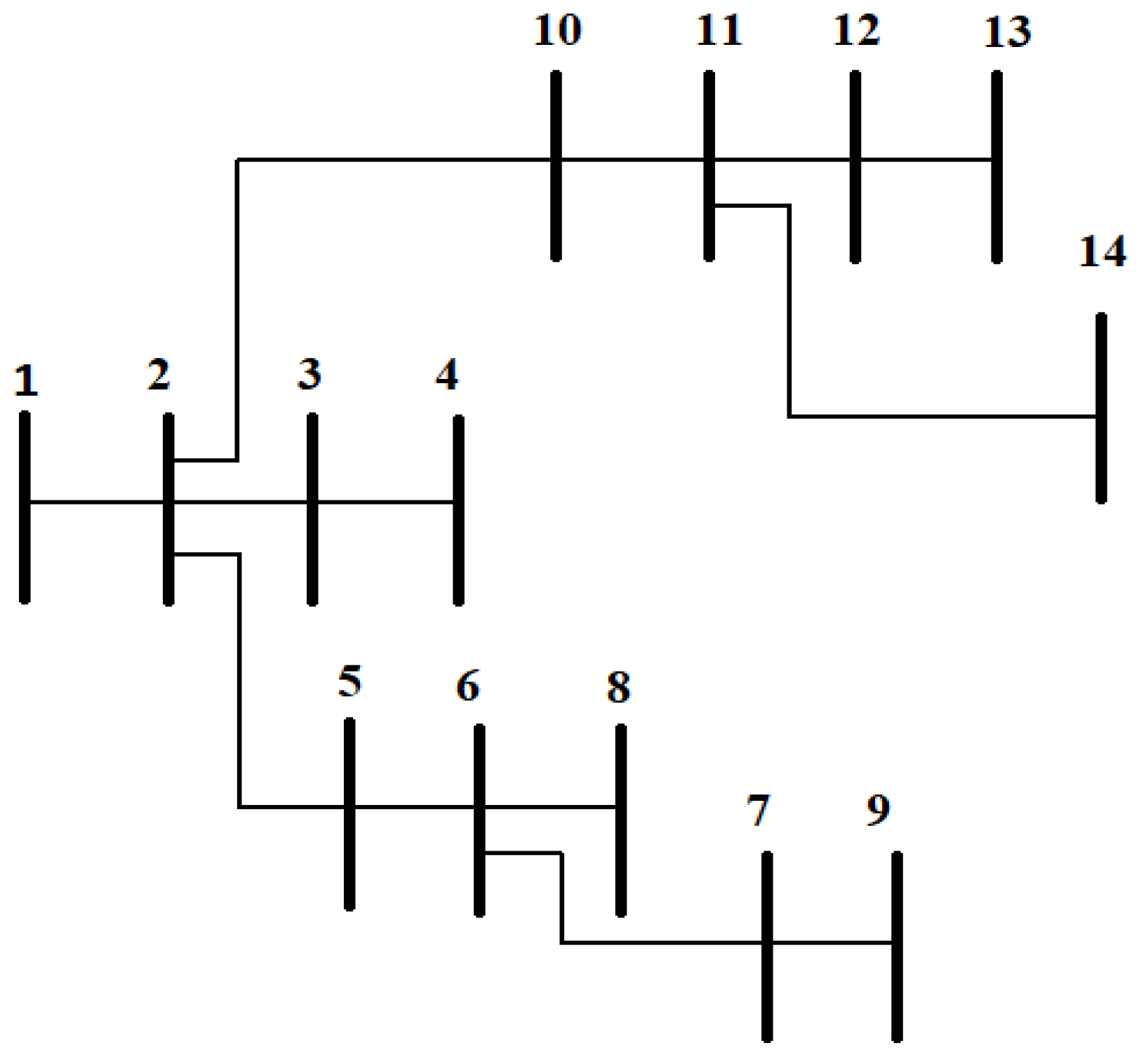
- Selection of optimal size and location of DGs for a 14-bus RDS.
- Load dispatch was conducted under two different scenarios (i.e., with and without renewable energy for minimization of cost and minimization of emission.
- TOPSIS was implemented to obtain the best-compromised solution (BCS).
2. Problem Formulation
2.1. Optimal Placement of DG
2.2. Economic Dispatch
2.2.1. Modeling of Conventional Thermal Generators
2.2.2. Modeling of Wind Power Plant
2.2.3. Modeling of Fuel-Cell Unit
2.3. Emission Dispatch
2.4. Formulation of Multiobjective CHPEED Problem
2.5. Constraints
2.6. TOPSIS
3. Harris Hawks Optimization
- A prey for the Harris hawk is a rabbit having great escaping energy; therefore, several hawks cooperatively attack to prey simultaneously from different directions.
- This attack can be completed quickly, but sometimes considering the escape ability and behavior of the prey, it takes a few short-length, quick dives nearby the prey.
- The different phase of chasing a prey depends on the prey’s escaping pattern with other dynamic conditions.
- The switching strategy occurs when the best hawk (leader) stops and becomes lost on the hunt, and one of the other group members will pursue the chase.
- The Harris hawk can switch between these phases to confuse the prey, which leads to their exhaustion, and increases its vulnerability.
- Furthermore, by confusing the escaping prey, it cannot recover its defensive abilities and, in the end, it cannot escape from the team and encounter one of the hawks, which is often the most powerful and experienced, easily grabs the tired prey, and shares it with another group member.
3.1. Exploration Stage
3.2. Transition from Exploration to Exploitation
3.3. Exploitation Stage
3.3.1. Soft Besiege
3.3.2. Hard Besiege
3.3.3. Soft Besiege with Progressive Rapid Dives
3.3.4. Hard Besiege with Progressive Rapid Dives
4. Simulation Results
4.1. Description of Test Cases
- (i)
- A two-diesel generator (Dg) with the sizes of 200 kW and 100 kW was selected and placed on buses 7 and 13, respectively. Similarly, the two microturbines (MTs) were selected with the sizes of 80 kW and 30 kW and placed on buses 3 and 14, respectively. A Dg with the size of 500 kW was selected as a virtual generator to cover the peak demand of 495 kW.
- (ii)
- To analyze the impact of renewable energy integration(REI), the Dg of capacity 100 kW at bus 13 was replaced by a fuel cell (FC), the MT of 30 kW of bus 14 was replaced by a wind turbine with a capacity of 40 kW, and rest was the same as above.
4.2. Discussion
4.2.1. Best Cost Solution
4.2.2. Best Emission Solution
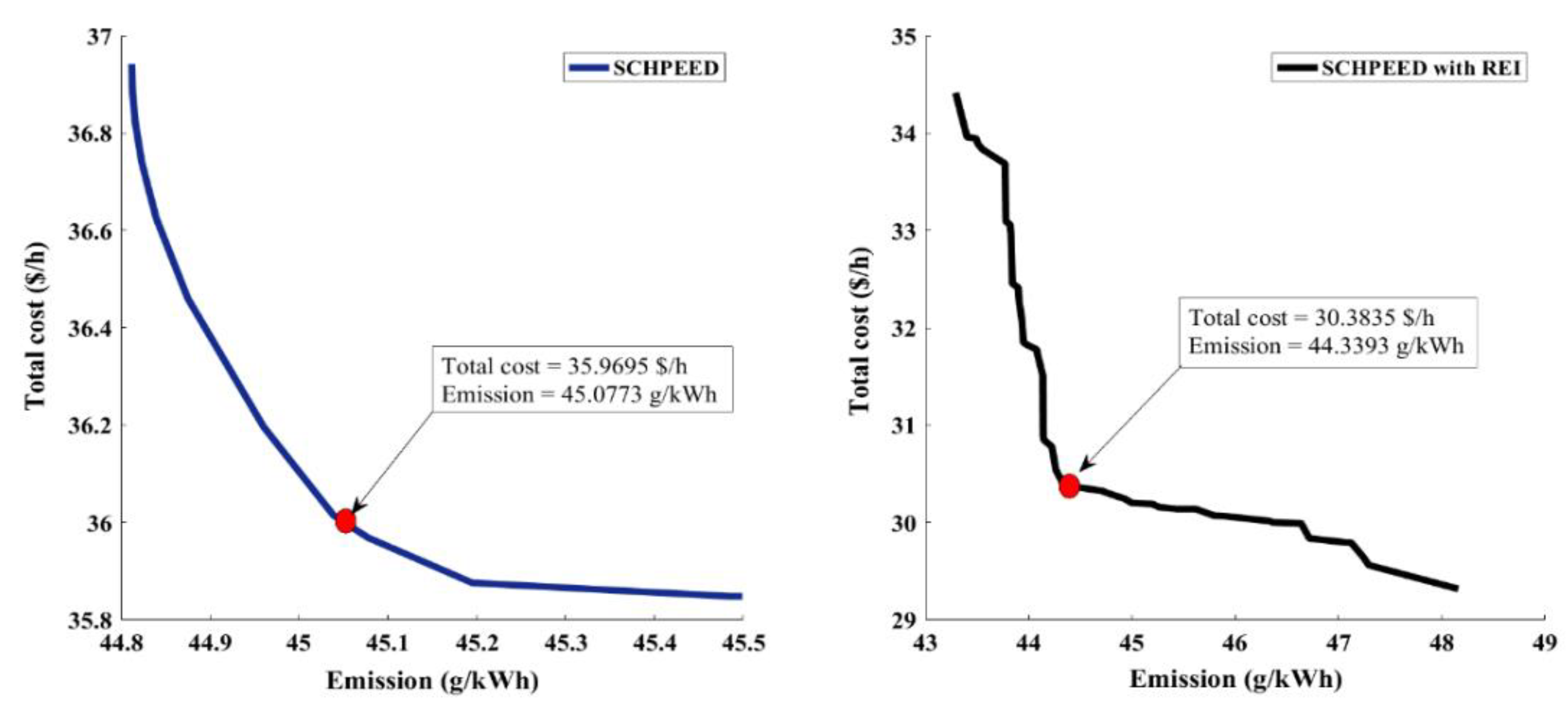
4.2.3. Best Compromise Solution
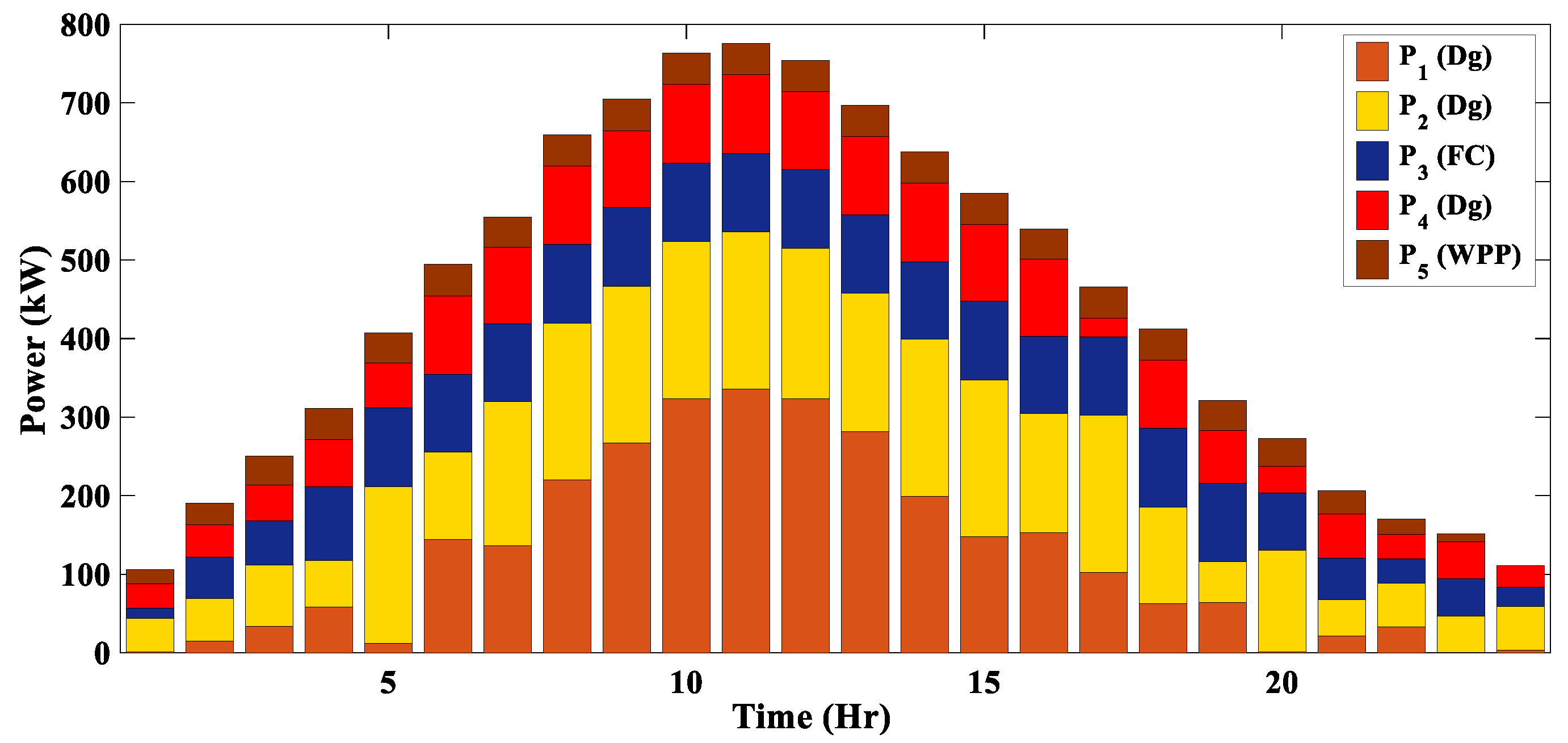
4.2.4. Heat Output
5. Conclusions
- HHO is simple to implement and found to be impactful for the solution of both SCHPEED and MCHPEED complex constrained optimization problems.
- With REI, fuel cost is reduced by 6.53 USD/h (18%) and emission is reduced by 1.519 g/kWh(3.4%) for SCHPEED, whereas fuel cost is reduced by USD 179.759 (14.95%) and emission is reduced by 59.60 g/kW (5.58%) for MCHPEED.
- Heat output is found to be sensitive to changes in load demand
- Operational cost, emission, and heat output are minimized with REI.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| FC | Fuel cell | RDS | Radial distribution system |
| DG | distributed generators | CHP | Combined heat and power |
| MG | microgrid | EED | Economic emission dispatch |
| WPP | Wind power plant | SCHPEED | CHP under EED for static (fixed) load |
| MT | Micro Turbine | MCHPEED | CHP under EED for Multiple (dynamic) load |
| REI | Renewable Energy Integration | BCS | Best compromise solution |
| penalty cost due to underestimation of wind | Probability distribution function | ||
| reserve cost due to overestimation of wind | Minimum and maximum voltage | ||
| shape factor | cost of thermal units, wind power plant, and fuel cell, respectively | ||
| scale factor | Cut-in velocity, cut-out velocity, and rated velocity in m/s, respectively | ||
| Total heat output | Heat-to-power ratio of ith DG unit | ||
| Total heat demand. | Cost and emission function | ||
| Price penalty factor | Weighting factor |
References
- Alam, M.S.; Arefifar, S.A. Energy Management in Power Distribution Systems: Review, Classification, Limitations and Challenges. IEEE Access 2019, 7, 92979–93001. [Google Scholar] [CrossRef]
- Alipour, M.; Mohammadi-Ivatloo, B.; Zare, K. Stochastic scheduling of renewable and CHP-based microgrids. IEEE Trans. Ind. Infor. 2015, 11, 1049–1058. [Google Scholar] [CrossRef]
- Haghrah, A.; Nazari-Heris, M.; Mohammadi-ivatloo, B. Solving combined heat and power economic dispatch problem using real coded genetic algorithm with improved mühlenbein mutation. Appl. Therm. Eng. 2016, 99, 465–475. [Google Scholar] [CrossRef]
- Hagh, M.T.; Teimourzadeh, S.; Alipour, M.; Aliasghary, P. Improved group search optimization method for solving CHPED in large scale power systems. Energy Convers Manag. 2014, 80, 446–456. [Google Scholar] [CrossRef]
- Roy, P.K.; Paul, C.; Sultana, S. Oppositional teaching learning based optimization approach for combined heat and power dispatch. Int.J. Electr. Power Energy Syst. 2014, 57, 392–403. [Google Scholar] [CrossRef]
- Basu, M. Modified Particle Swarm Optimization for Non-smooth Non-convex Combined Heat and Power Economic Dispatch. Electr. Power Compon. Syst. 2015, 43, 2146–2155. [Google Scholar] [CrossRef]
- Lashkar Ara, A.; Mohammad Shahi, N.; Nasir, M. CHP Economic Dispatch Considering Prohibited Zones to Sustainable Energy Using Self-Regulating Particle Swarm Optimization Algorithm. Iran. J. Sci. Technol.—Trans. Electr. Eng. 2020, 44, 1147–1164. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Vo, D.N.; Dinh, B.H. Cuckoo search algorithm for combined heat and power economic dispatch. Inter. J Electr. Power Energy Syst. 2016, 81, 204–214. [Google Scholar] [CrossRef]
- Beigvand, S.D.; Abdi, H.; La Scala, M. Combined heat and power economic dispatch problem using gravitational search algorithm. Electr. Power Syst. Res. 2016, 133, 160–172. [Google Scholar] [CrossRef]
- Ghorbani, N. Combined heat and power economic dispatch using exchange market algorithm. Inter. J.Electr. Power Energy Syst. 2016, 82, 58–66. [Google Scholar] [CrossRef]
- Basu, M. Group search optimization for combined heat and power economic dispatch. Inter. J.Electr. Power Energy Syst. 2016, 78, 138–147. [Google Scholar] [CrossRef]
- Jayakumar, N.; Subramanian, S.; Ganesan, S.; Elanchezhian, E.B. Grey wolf optimization for combined heat and power dispatch with cogeneration systems. Inter. J.Electr. Power Energy Syst. 2016, 74, 252–264. [Google Scholar] [CrossRef]
- Dashtdar, M.; Flah, A.; Hosseinimoghadam, S.M.; Kotb, H.; Jasińska, E.; Gono, R.; Leonowicz, Z.; Jasiński, M. Optimal Operation of Microgrids with Demand-Side Management Based on a Combination of Genetic Algorithm and Artificial Bee Colony. Sustainability 2022, 14, 6759. [Google Scholar] [CrossRef]
- Chiñas-Palacios, C.; Vargas-Salgado, C.; Aguila-Leon, J.; Hurtado-Pérez, E. A Cascade Hybrid PSO Feed-Forward Neural Network Model of a Biomass Gasification Plant for Covering the Energy Demand in an AC Microgrid. Energy Convers. Manag. 2021, 232, 113896. [Google Scholar] [CrossRef]
- Aguila-Leon, J.; Chiñas-Palacios, C.; Garcia, E.X.M.; Vargas-Salgado, C. A Multimicrogrid Energy Management Model Implementing an Evolutionary Game-Theoretic Approach. Int. Trans. Electr. Energy Syst. 2020, 30, e12617. [Google Scholar] [CrossRef]
- Barbosa-Ayala, O.I.; Montañez-Barrera, J.A.; Damian-Ascencio, C.E.; Saldaña-Robles, A.; Alfaro-Ayala, J.A.; Padilla-Medina, J.A.; Cano-Andrade, S. Solution to the Economic Emission Dispatch Problem Using Numerical Polynomial Homotopy Continuation. Energies 2020, 13, 4281. [Google Scholar] [CrossRef]
- Ahmadi, A.; Moghimi, H.; Nezhad, A.E.; Agelidis, V.G.; Sharaf, A.M. Multiobjective economic emission dispatch considering combined heat and power by normal boundary intersection method. Electr. Power Syst. Res. 2015, 129, 32–43. [Google Scholar] [CrossRef]
- Shaabani, Y.A.; Seifi, A.R.; Kouhanjani, M.J. Stochastic multiobjective optimization of combined heat and power economic/emission dispatch. Energy 2017, 141, 1892–1904. [Google Scholar] [CrossRef]
- Jayakumar, N.; Subramanian, S.; Ganesan, S.; Elanchezhian, E.B. Combined heat and power dispatch by grey wolf optimization. Inter. J. Energy Sect. Manag. 2015. [Google Scholar] [CrossRef]
- Sundaram, A. Multiobjective multi-verse optimization algorithm to solve combined economic, heat and power emission dispatch problems. Appl. Soft Comp. 2020, 91, 106195. [Google Scholar] [CrossRef]
- Dubey, H.M.; Pandit, M.; Panigrahi, B.K. An overview and comparative analysis of recent bio-inspired optimization techniques for wind integrated multiobjective power dispatch. Swarm Evol Comp. 2018, 38, 12–34. [Google Scholar] [CrossRef]
- Basu, M.; Chowdhury, A. Cuckoo search algorithm for economic dispatch. Energy 2013, 60, 99–108. [Google Scholar] [CrossRef]
- Basu, M. Squirrel Search Algorithm for Multi-region Combined Heat and Power Economic Dispatch Incorporating Renewable Energy Sources. Energy 2019, 182, 296–305. [Google Scholar] [CrossRef]
- Dubey, S.M.; Dubey, H.M.; Pandit, M.; Salkuti, S.R. Multiobjective Scheduling of Hybrid Renewable Energy System Using Equilibrium Optimization. Energies 2021, 14, 6376. [Google Scholar] [CrossRef]
- Jin, J.; Wen, Q.; Zhang, X.; Cheng, S.; Guo, X. Economic Emission Dispatch for Wind Power Integrated System with Carbon Trading Mechanism. Energies 2021, 14, 1870. [Google Scholar] [CrossRef]
- Vargas-Salgado, C.; Berna-Escriche, C.; Escrivá-Castells, A.; Díaz-Bello, D. Optimization of All-Renewable Generation Mix According to Different Demand Response Scenarios to Cover All the Electricity Demand Forecast by 2040: The Case of the Grand Canary Island. Sustainability 2022, 14, 1738. [Google Scholar] [CrossRef]
- Tiwari, V.; Dubey, H.M.; Pandit, M. Economic Dispatch in Renewable Energy Based Microgrid Using Manta Ray Foraging Optimization. In Proceedings of the 2nd International Conference on Electrical Power and Energy Systems (ICEPES 2021), Online Mode, 10–11 December 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Harsh, P.; Das, D. Energy Management in Microgrid Using Incentive-Based Demand Response and Reconfigured Network Considering Uncertainties in Renewable Energy Sources. Sustain. Energy Technol. Assess. 2021, 46, 101225. [Google Scholar] [CrossRef]
- Anand, H.; Narang, N.; Dhillon, J.S. Multi-Objective Combined Heat and Power Unit Commitment Using Particle Swarm Optimization. Energy 2019, 172, 794–807. [Google Scholar] [CrossRef]
- Rezaee Jordehi, A. A Mixed Binary-continuous Particle Swarm Optimisation Algorithm for Unit Commitment in Microgrids Considering Uncertainties and Emissions. Int. Trans. Electr. Energy Syst. 2020, 30, e12581. [Google Scholar] [CrossRef]
- Hetzer, J.; Yu, D.C.; Bhattarai, K. An economic dispatch model incorporating wind power. IEEE Trans. Energy Convers 2008, 23, 603–611. [Google Scholar] [CrossRef]
- Basu, A.K.; Bhattacharya, A.; Chowdhury, S.; Chowdhury, S.P. Planned scheduling for economic power sharing in a CHP-based micro-grid. IEEE Tran. Power Syst. 2011, 27, 30–38. [Google Scholar] [CrossRef]
- Wolpert, D.H.; Macready, W.G. No free lunch theorems for optimization. IEEE Trans. Evol. Comp. 1997, 1, 67–82. [Google Scholar] [CrossRef] [Green Version]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H. Harris hawks optimization: Algorithm and applications. Future Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Abdelsalam, M.; Diab, H.Y.; El-Bary, A.A. A Metaheuristic Harris Hawk Optimization Approach for Coordinated Control of Energy Management in Distributed Generation Based Microgrids. Appl. Sci. 2021, 11, 4085. [Google Scholar] [CrossRef]
- Hong, L.; Rizwan, M.; Rasool, S.; Gu, Y. Optimal Relay Coordination with Hybrid Time–Current–Voltage Characteristics for an Active Distribution Network Using Alpha Harris Hawks Optimization. Eng. Proc. 2021, 12, 26. [Google Scholar] [CrossRef]
- Hwang, C.L.; Yoon, K.P. Multiple Attribute Decision Making: Methods and Applications; Springer: New York, NY, USA, 1981. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bus No. | Start Bus | End Bus | R | X | Real | Reactive |
|---|---|---|---|---|---|---|
| 1 | 0 | 0 | 0 | 0 | 0 | 0 |
| 2 | 1 | 2 | 0.0133 | 0.042 | 20 | 6 |
| 3 | 2 | 3 | 0.0194 | 0.059 | 85 | 27 |
| 4 | 3 | 4 | 0.0312 | 0.16 | 40 | 1 |
| 5 | 2 | 5 | 0.023 | 0.12 | 20 | 6 |
| 6 | 5 | 6 | 0.023 | 0.12 | 20 | 6 |
| 7 | 6 | 7 | 0.0193 | 0.059 | 76 | 16 |
| 8 | 6 | 8 | 0.032 | 0.084 | 10 | 30 |
| 9 | 7 | 9 | 0.034 | 0.17 | 61 | 16 |
| 10 | 2 | 10 | 0.016 | 0.042 | 12 | 75 |
| 11 | 10 | 11 | 0.193 | 0.059 | 10 | 90 |
| 12 | 11 | 12 | 0.067 | 0.17 | 16 | 61 |
| 13 | 12 | 13 | 0.04 | 0.1 | 90 | 59 |
| 14 | 11 | 14 | 0.05 | 0.15 | 35 | 61 |
| Parameters | Without DGs | With 4 DGs |
|---|---|---|
| Power Loss (kW) | 0.1995 | 0.1297 |
| Loss Reduction (%) | - | 34.99 |
| DGs Size (kW) /Location | - | 90.3178/3, 187.9/7, 114.9414/13, 44.8314/14 |
| Total DG Size (kW) | - | 437.9906 |
| (pu) | 0.9992 | 0.9995 |
| (pu) | 0.9998 | 0.9999 |
| Type | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Dg | 500 | 0.00 | 500 | 10.193 | 105.18 | 62.56 | 26.55 | −16.1836 | 7.0508 | 10,314 |
| Dg | 200 | 40 | 200 | 2.035 | 60.28 | 44.0 | 14.4296 | −64.1535 | 130.4094 | 11,041 |
| MT | 80 | 16 | 80 | 0.5768 | 57.783 | −133.0915 | 3.0358 | −57.3403 | 311.5728 | 11,373 |
| Dg | 100 | 20 | 100 | 1.1825 | 65.34 | 44.0 | 19.38 | −176.6946 | 821.6573 | 10,581 |
| MT | 30 | 6.0 | 30 | 0.338 | 89.1476 | −547.619 | 1.0346 | −60.384 | 943.1898 | 12,186 |
| FC | 100 | 0 | 100 | 0 | 0.07 | 0 | 0 | 0 | 0 | 0 |
| WPP | 40 | 0 | 40 | 0 | 0.22 | 0 | 0 | 0 | 0 | 0 |
| Scenarios | Methods | Fuel Cost (USD/h) | Emission (g/kWh) | Heat (kWh) | Loss (kW) | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| Best Cost | HHO | 0.00 | 157.09 | 80.00 | 73.1552 | 30.00 | 35.8483 | 45.4856 | 347.5639 | 2.2452 |
| DE [32] | 0.00 | 166.30 | 80.00 | 64.30 | 30.00 | 35.8974 | 45.8467 | 348.048 | --- | |
| PSO [32] | 0.00 | 166.68 | 80.00 | 63.89 | 30.00 | 35.897 | 45.870 | 348.000 | --- | |
| Best Emission | HHO | 0.00 | 168.8009 | 57.1848 | 96.0540 | 21.0526 | 36.9396 | 44.8121 | 329.3694 | 5.0922 |
| DE [32] | 0.00 | 166.50 | 58.30 | 96.10 | 21.50 | 36.851 | 44.820 | 329.790 | --- | |
| PSO [32] | 0.00 | 166.20 | 58.64 | 96.07 | 21.66 | 36.840 | 44.820 | 330.070 | --- | |
| BCS | HHO | 0.00 | 146.4312 | 80.00 | 89.92 | 24.7656 | 35.9695 | 45.0773 | 344.0685 | 3.1168 |
| DE [32] | 0.00 | 150.54 | 80.00 | 90.92 | 20.55 | 36.0720 | 45.020 | 341.7225 | --- | |
| PSO [32] | 0.00 | 150.20 | 80.00 | 89.86 | 21.95 | 36.0600 | 45.030 | 342.7200 | ---- |
| Scenario | Total Cost (USD/h) | Fuel Cost (USD/h) | Wind Cost (USD/h) | Emission (g/kWh) | Heat (kWh) | Loss (kW) | |||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Best Cost | 0.00 | 174.8425 | 95.6318 | 33.2694 | 39.8741 | 29.3180 | 27.5252 | 1.7928 | 48.1604 | 171.1845 | 5.6179 |
| Best Emission | 0.00 | 200.00 | 50.1720 | 100.00 | 0.4670 | 34.4114 | 34.2040 | 0.2074 | 43.2924 | 244.9725 | 12.6390 |
| BCS | 0.00 | 155.0687 | 92.0436 | 88.6900 | 9.1448 | 30.3835 | 29.9638 | 0.4197 | 44.3393 | 198.7907 | 6.9470 |
| Scenario | MCHPEED | MCHPEED with REI | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Total Cost (USD) | Emission (g/kW) | Heat (kW) | Loss (kW) | Total Cost (USD) | Fuel Cost (USD) | Wind Cost (USD) | Emission (g/kW) | Heat (kW) | Loss (kW) | |
| Min.Cost | 1203.0999 | 1089.9256 | 15,587.8723 | 203.5641 | 1023.3403 | 1003.2465 | 20.0938 | 1085.8532 | 15,528.2799 | 167.1917 |
| Min. Emis | 1250.0066 | 1068.1567 | 15,918.5405 | 309.1087 | 1384.1995 | 1361.902 | 22.2975 | 1008.5490 | 17,674.5642 | 555.1573 |
| BCS | 1211.5507 | 1077.6050 | 15,588.9110 | 212.6814 | 1094.9539 | 1070.9602 | 23.9937 | 1050.8518 | 15,579.2478 | 253.8731 |
| S. No. | SCHPEED | SCHPEED with REI | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Fuel Cost (USD/h) | Emission (g/kWh) | TOPSIS | Total Cost (USD/h) | Emission (g/kWh) | TOPSIS | |||||
| 1 | 35.9695 | 45.0773 | 0.002 | 0.0079 | 0.796 | 30.3835 | 44.3393 | 0.0111 | 0.0415 | 0.7886 |
| 2 | 36.0148 | 45.0389 | 0.002 | 0.0077 | 0.7941 | 30.5396 | 44.2242 | 0.0117 | 0.041 | 0.7784 |
| 3 | 35.8766 | 45.1944 | 0.0026 | 0.0083 | 0.7613 | 30.0147 | 45.1952 | 0.014 | 0.0407 | 0.7433 |
| 4 | 36.1974 | 44.96 | 0.0028 | 0.0067 | 0.7039 | 30.2459 | 45.2667 | 0.0153 | 0.0388 | 0.7172 |
| 5 | 35.8483 | 45.4856 | 0.0046 | 0.0083 | 0.6436 | 30.3843 | 45.336 | 0.0163 | 0.0376 | 0.698 |
| 6 | 36.4597 | 44.8753 | 0.0046 | 0.0056 | 0.5464 | 31.5101 | 43.9487 | 0.0182 | 0.0368 | 0.6697 |
| 7 | 36.6261 | 44.8394 | 0.0059 | 0.0051 | 0.4633 | 31.4086 | 44.444 | 0.0185 | 0.0349 | 0.6531 |
| 8 | 36.7405 | 44.8232 | 0.0068 | 0.0048 | 0.4177 | 31.8543 | 44.1804 | 0.0213 | 0.0339 | 0.6146 |
| 9 | 36.8258 | 44.8157 | 0.0074 | 0.0047 | 0.3901 | 29.6449 | 47.2935 | 0.0272 | 0.0388 | 0.5877 |
| 10 | 36.9396 | 44.8121 | 0.0083 | 0.0047 | 0.3614 | 29.318 | 48.1604 | 0.0329 | 0.041 | 0.5542 |
| S. No. | MCHPEED | MCHPEED with REI | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Fuel Cost (USD) | Emission (g/kW) | TOPSIS | Total Cost (USD) | Emission (g/kW) | TOPSIS | |||||
| 1 | 1211.551 | 1077.605 | 0.0342 | 0.1084 | 0.7602 | 1094.954 | 1050.852 | 0.1551 | 0.5313 | 0.7741 |
| 2 | 1216.566 | 1072.838 | 0.0381 | 0.1015 | 0.7268 | 1137.664 | 1039.921 | 0.2188 | 0.4576 | 0.6765 |
| 3 | 1216.921 | 1074.578 | 0.0406 | 0.0988 | 0.709 | 1175.755 | 1033.977 | 0.2841 | 0.3924 | 0.58 |
| 4 | 1203.1 | 1089.926 | 0.0561 | 0.1241 | 0.6888 | 1199.708 | 1030.557 | 0.3263 | 0.3522 | 0.5191 |
| 5 | 1221.714 | 1073.912 | 0.0509 | 0.0891 | 0.6365 | 1228.073 | 1028.583 | 0.3772 | 0.3045 | 0.4467 |
| 6 | 1222.0187 | 1082.3297 | 0.044 | 0.0578 | 0.5677 | 1260.982 | 1023.543 | 0.4362 | 0.2537 | 0.3677 |
| 7 | 1223.182 | 1087.8793 | 0.0522 | 0.0542 | 0.5093 | 1280.761 | 1022.409 | 0.4721 | 0.2236 | 0.3214 |
| 8 | 1227.4204 | 1086.4162 | 0.056 | 0.0471 | 0.4568 | 1306.819 | 1015.037 | 0.519 | 0.1947 | 0.2728 |
| 9 | 1230.0698 | 1089.8465 | 0.0635 | 0.0421 | 0.3983 | 1347.69 | 1013.701 | 0.5934 | 0.1521 | 0.204 |
| 10 | 1250.007 | 1068.157 | 0.1173 | 0.057 | 0.3272 | 1384.2 | 1008.549 | 0.6598 | 0.1465 | 0.183 |
| Hr. | Load (kW) | Heat (kW) | |||||
|---|---|---|---|---|---|---|---|
| 1 | 0.1742 | 43.8226 | 18.95 | 28.9484 | 13.7722 | 105 | 107.6286 |
| 2 | 0.0439 | 100.2222 | 20.8996 | 57.2967 | 15.1846 | 190 | 181.4153 |
| 3 | 7.9917 | 106.5203 | 41.9026 | 82.8549 | 15.4974 | 250 | 257.7412 |
| 4 | 34.6496 | 86.6041 | 79.7197 | 95.8914 | 16.1365 | 310 | 375.0671 |
| 5 | 79.0714 | 122.3964 | 76.6417 | 98.9171 | 25.9711 | 400 | 532.2534 |
| 6 | 111.5772 | 186.8943 | 79.5952 | 91.3479 | 24.9627 | 490 | 666.1347 |
| 7 | 146.7594 | 199.9927 | 78.8478 | 99.8593 | 29.8921 | 550 | 780.8991 |
| 8 | 256.9116 | 199.6686 | 77.2061 | 99.9982 | 29.1331 | 650 | 1061.2783 |
| 9 | 300.363 | 199.9386 | 79.9998 | 99.7264 | 28.9461 | 690 | 1177.0124 |
| 10 | 364.7395 | 199.1256 | 78.1749 | 99.9798 | 28.6631 | 740 | 1339.5097 |
| 11 | 377.7434 | 200 | 79.9864 | 98.3194 | 27.7766 | 750 | 1373.6715 |
| 12 | 353.816 | 197.5439 | 79.9687 | 100 | 27.3565 | 730 | 1310.6095 |
| 13 | 292.299 | 196.903 | 78.4594 | 99.9998 | 30 | 680 | 1153.3381 |
| 14 | 232.1257 | 199.7308 | 80 | 99.892 | 28.6524 | 630 | 1000.5748 |
| 15 | 183.5236 | 198.0663 | 78.5526 | 97.0593 | 29.4762 | 580 | 870.8251 |
| 16 | 173.3918 | 175.3966 | 64.5036 | 99.9331 | 27.4251 | 535 | 805.1119 |
| 17 | 137.2064 | 147.8064 | 78.3677 | 79.0651 | 21.3752 | 460 | 682.8948 |
| 18 | 99.7382 | 139.1221 | 67.8092 | 85.6515 | 20.4403 | 410 | 567.8843 |
| 19 | 59.8613 | 75.3932 | 79.433 | 89.8884 | 17.4494 | 320 | 427.6205 |
| 20 | 1.3002 | 129.0986 | 56.3055 | 76.8063 | 11.8101 | 270 | 269.2425 |
| 21 | 6.216 | 92.0592 | 22.5511 | 77.3491 | 11.2522 | 205 | 202.8413 |
| 22 | 2.9803 | 72.9563 | 33.5925 | 52.3411 | 10.0549 | 170 | 172.7066 |
| 23 | 0 | 58.0973 | 31.3545 | 53.8645 | 8.5012 | 150 | 148.3782 |
| 24 | 4.6627 | 41.2238 | 27.9014 | 23.5275 | 12.9832 | 110 | 124.272 |
| Hr. | Load (kW) | Heat (kW) | |||||
|---|---|---|---|---|---|---|---|
| 1 | 0.4602 | 55.8001 | 0.0026 | 38.1092 | 12.2087 | 105 | 77.6358 |
| 2 | 0.0014 | 67.2099 | 32.6849 | 76.9633 | 16.9728 | 190 | 116.7346 |
| 3 | 16.6051 | 76.3607 | 49.985 | 97.6993 | 13.7738 | 250 | 183.5804 |
| 4 | 43.8702 | 95.4026 | 65.24 | 86.5622 | 21.4451 | 310 | 260.8134 |
| 5 | 2.0257 | 193.1514 | 84.1992 | 99.9095 | 31.4198 | 400 | 244.4528 |
| 6 | 137.9878 | 156.3819 | 94.3015 | 81.5604 | 23.9735 | 490 | 550.0218 |
| 7 | 172.6773 | 181.9743 | 83.4654 | 84.7427 | 33.0027 | 550 | 663.1865 |
| 8 | 248.3451 | 198.6839 | 88.2413 | 97.6099 | 29.5584 | 650 | 882.3438 |
| 9 | 339.0121 | 193.143 | 90.55 | 73.6115 | 23.326 | 690 | 1092.496 |
| 10 | 389.558 | 193.4966 | 93.7557 | 85.5281 | 17.9975 | 740 | 1232.578 |
| 11 | 372.8658 | 192.9266 | 95.0478 | 96.2457 | 27.3994 | 750 | 1197.57 |
| 12 | 365.0877 | 198.1613 | 72.7586 | 87.811 | 37.2745 | 730 | 1175.156 |
| 13 | 288.2583 | 183.1858 | 95.2879 | 96.5362 | 34.9216 | 680 | 971.5743 |
| 14 | 238.2183 | 198.1671 | 83.9061 | 83.2904 | 37.8205 | 630 | 844.4403 |
| 15 | 198.0663 | 199.9986 | 68.8349 | 84.5582 | 35.8806 | 580 | 743.4311 |
| 16 | 161.1864 | 184.6829 | 70.2232 | 89.7806 | 34.1974 | 535 | 639.7981 |
| 17 | 98.8017 | 154.436 | 88.2272 | 92.8929 | 28.9415 | 460 | 456.3623 |
| 18 | 33.2158 | 174.0753 | 76.4767 | 99.9994 | 33.2225 | 410 | 309.1514 |
| 19 | 16.428 | 103.6468 | 67.9597 | 97.0659 | 39.9701 | 320 | 205.216 |
| 20 | 15.2292 | 136.6882 | 29.9529 | 62.3144 | 30.3556 | 270 | 201.9077 |
| 21 | 0 | 59.1014 | 39.9741 | 90.1443 | 20.5677 | 205 | 120.4767 |
| 22 | 9.5316 | 78.936 | 2.6982 | 64.9587 | 17.4007 | 170 | 141.4918 |
| 23 | 1.3006 | 47.4008 | 42.5158 | 51.3921 | 8.6482 | 150 | 83.3885 |
| 24 | 0.2675 | 60.3013 | 12.1609 | 36.1635 | 2.3829 | 110 | 79.3222 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tiwari, V.; Dubey, H.M.; Pandit, M.; Salkuti, S.R. CHP-Based Economic Emission Dispatch of Microgrid Using Harris Hawks Optimization. Fluids 2022, 7, 248. https://doi.org/10.3390/fluids7070248
Tiwari V, Dubey HM, Pandit M, Salkuti SR. CHP-Based Economic Emission Dispatch of Microgrid Using Harris Hawks Optimization. Fluids. 2022; 7(7):248. https://doi.org/10.3390/fluids7070248
Chicago/Turabian StyleTiwari, Vimal, Hari Mohan Dubey, Manjaree Pandit, and Surender Reddy Salkuti. 2022. "CHP-Based Economic Emission Dispatch of Microgrid Using Harris Hawks Optimization" Fluids 7, no. 7: 248. https://doi.org/10.3390/fluids7070248
APA StyleTiwari, V., Dubey, H. M., Pandit, M., & Salkuti, S. R. (2022). CHP-Based Economic Emission Dispatch of Microgrid Using Harris Hawks Optimization. Fluids, 7(7), 248. https://doi.org/10.3390/fluids7070248