The method of regularized Stokeslets was introduced by Cortez in [
1] to eliminate the need to integrate a singular kernel in boundary integral methods for Stokes flow. Since then, regularized Stokeslets have enjoyed widespread use in models of general fluid–structure interaction [
2,
3,
4,
5,
6,
7,
8]. The method of regularized Stokeslets has become especially popular for modeling the dynamics of thin fibers in a three-dimensional fluid, providing an alternative way to deal with the singular integrals arising in the classical slender body theories of Lighthill [
9], Keller–Rubinow [
10], and Johnson [
11]. Slender body models based on regularized Stokeslets have found wide use in biophysical modeling applications [
12,
13,
14,
15,
16,
17,
18,
19] and have led to advances in numerical methods [
20,
21,
22,
23,
24] as well as further modeling extensions [
25,
26,
27].
In this paper we aim to compare slender body theory based on regularized Stokeslets [
28] to its classical counterpart [
9,
10,
11,
29,
30,
31]. This type of question has been addressed previously in various forms. Some authors have studied the convergence of a single regularized Stokeslet to a singular Stokeslet in the far field and as the regularization parameter
[
32,
33,
34]. Others have considered regularized SBT specifically, as a line integral of either regularized Stokeslets [
13] or regularized Stokeslets plus doublet corrections [
28], and have explored the relation to classical SBT in terms of both the fiber radius
and the regularization parameter
. In particular, Cortez and Nicholas [
28] used a matched asymptotic expansion of the regularized SBT velocity field at the filament surface to compare the regularized fiber velocity to the classical Lighthill [
9] and Keller–Rubinow [
10] slender body theories.
We show the following results. For the velocity of the fiber itself, while it is known that the regularization parameter should be chosen to be proportional to the fiber radius for highest accuracy, we show that in fact is necessary to achieve asymptotic agreement between regularized and classical SBT as . However, the flow at the surface of the filament due to regularized SBT cannot be made to converge to the flow due to classical SBT for any choice of proportional to . An difference in the force-per-unit-length at the fiber surface is also noted. As a consequence of this discrepancy, the flow around the filament due to regularized Stokeslets does not converge to the flow due to classical SBT as . This discrepancy is perhaps not unexpected: since the leading order term of SBT blows up like as , different methods designed to capture the leading order in may still differ by an quantity. Part of the issue stems from balancing the effects of two small parameters, and , and trying to relate them in a physically meaningful yet practically useful way. This type of issue does not arise for regularized Stokeslets in 2D or over surfaces in 3D.
Finally, we verify the above differences numerically and provide numerical evidence that the small magnitude and extent of the discrepancy between regularized and classical SBT may mean that their difference is more of a moral issue than a practical one.
1.1. Classical Slender Body Theory and the Slender Body PDE
We begin with a precise definition of the slender body geometry considered here. We consider a closed, non-self-intersecting
curve
whose coordinates are given by
, where
is parameterized by arclength
s. The non-self-intersection requirement means that there exists a constant
such that
At each point along
we define the unit tangent vector
and consider the orthonormal frame
defined in [
35], which satisfies the ODEs
This frame is the periodic version of the Bishop frame [
37] for free-ended curves, which is constructed by parallel transport of a choice of normal vectors along
, and for which
. Here
,
, is a constant that may not necessarily be chosen to vanish and which serves to slowly rotate the pair
along
such that the frame is periodic in
s. The coefficients
and
are related to the curvature
of
via
We also define the following cylindrical unit vectors with respect to the orthonormal frame (
1):
We may then define the slender body
and its surface
as
Along the slender body surface
we define the Jacobian factor
We consider
immersed in Stokes flow, where the fluid velocity
and pressure
satisfy
Here is the fluid viscosity, which for convenience we will henceforth scale to .
The fundamental idea of slender body theory is to exploit the slenderness of the body to approximate the 3D fluid velocity about
as the flow due to a 1D curve of point forces along
. The most basic form of SBT, due to figures such as Hancock [
38], Cox [
39], and Batchelor [
40], places a curve of
Stokeslets, the free-space Green’s function for the Stokes equations, along the centerline of the filament. In
, the Stokeslet is given by
For improved accuracy, other authors, including Keller and Rubinow [
10], Lighthill [
9], and Johnson [
11], include higher order corrections to the Stokeslet to account for the finite radius of the fiber. The natural choice of correction, often known as the
doublet, is given by the Laplacian of the Stokeslet:
Combining the Stokeslet and doublet correction leads to the following approximation for the fluid velocity about the slender body:
The doublet coefficient
is chosen to cancel (to leading order in
) the angular dependence of the velocity field (
7) at the fiber surface
, giving rise to an expression that to leading order depends only on arclength. Specifically, for
, expression (
7) satisfies [
35,
36]
This
-independence is sometimes known as the
fiber integrity condition [
35,
36] and ensures that cross sections of the slender body do not deform. In particular, the fiber integrity condition, enforced by including the doublet correction, serves to give the fiber a 3D structure that can be detected by the surrounding fluid velocity field. Throughout the paper we will refer to expression (
7) as
classical slender body theory.
One difficulty with the classical SBT expression (
7) is that the Stokeslet
and doublet
are singular at
, which raises the question of how to obtain a useful expression for the velocity of the fiber itself.
The most common method for obtaining a fiber velocity expression is to perform a matched asymptotic expansion of (
7) about
. The resulting expression, which we will denote by
to emphasize that the integral kernel is distinct from (
7), is given by
where
. We refer to (
9) as Keller–Rubinow SBT, as Keller and Rubinow [
10] were the first to arrive at (the non-periodic version of) the expression (
9), although they did so by slightly different means.
However, one well-documented issue with Keller–Rubinow SBT is that the form of the integral operator in (
9) gives rise to high wavenumber instabilities [
29,
30,
31,
41]. Specifically, the eigenvalues of (
9) are known to cross zero and switch signs at high frequency, which is nonphysical behavior and leads to noninvertibility of (
9).
Various methods have been proposed to eliminate this high wavenumber instability in an asymptotically consistent way. One method, due to Shelley and Ueda [
30] and Tornberg and Shelley [
31], involves inserting a parameter proportional to the fiber radius into the integrand of (
9) to regularize the integral kernel, leading to the fiber velocity expression -4.6cm0cm
Here
and
is a parameter chosen such that the operator in (
10) is (at least in simple geometries) positive definite. Note that via the integral identities
the second term in the integrand of (
10) may be integrated asymptotically to instead yield a local term with coefficient
in place of
.
More recently, Andersson et al. [
42] proposed making use of the fiber integrity condition (
8) along the fiber surface to simply eliminate all
-dependent terms and obtain the following expression for the fiber velocity:
Here the parameter
can be used to convert (
11) to a second-kind integral equation, if desired.
For
, each of (
9)–(
11) satisfy (see [
35,
36,
42]):
Moreover, classical SBT is known to closely approximate the velocity field about a 3D filament given by the solution to a well-posed
slender body PDE, defined by Mori–Ohm–Spirn [
35,
36] as the following boundary value problem for the Stokes equations:
Here
is the fluid stress tensor,
is the unit normal vector directed into
at
and
is the Jacobian factor on
defined in (
3). In the slender body PDE formulation (
13), the fiber integrity condition is strictly enforced as a partial Dirichlet boundary condition on the fiber surface. The prescribed 1D force density
is defined to be the total surface stress over each cross section of the slender body.
One reason that the slender body PDE is a physically meaningful framework in which to place SBT is the following energy identity satisfied by solutions to (
13):
Here the viscous dissipation (left hand side) balances the power (right hand side) exerted by the slender filament on the fluid. This identity arises naturally in describing a swimming body in Stokes flow [
43].
In [
35,
36], it is shown that the difference between the velocity field
given by classical SBT (
7) and the solution
to (
13) satisfies
Furthermore, the fiber velocity expressions given by any of (
9)–(
11) satisfy
1.2. Method of Regularized Stokeslets
A different approach to addressing the difficulties associated with the singular kernel arising in classical SBT and, more broadly, in boundary integral methods for Stokes flow, is the method of regularized Stokeslets, developed by Cortez in [
1] with additional developments in [
2,
4,
28].
Instead of singular Stokeslets (
5), the method relies on regularized Stokeslets, which are derived by solving the Stokes equations in
with a smooth right hand side forcing:
Here
is an approximation to the identity, or
blob function, whose width is controlled by the parameter
, i.e.,
Here we use boldface
to denote the Dirac delta rather than the parameter
. The blob function
can be compactly supported or not, and is not required to be strictly positive [
33,
34]. For any such
, the solution to (
17) may be written as
, where
is known as a regularized Stokeslet and is smooth everywhere in
.
One of the most common choices of
is
because this gives rise to a simple, easy-to-use regularized Stokeslet that looks very similar to the singular Stokeslet (
5):
Many other choices of blob function are possible, including different power laws, exponentially decaying blobs, and compactly supported mollifiers [
5,
34]. The exponentially decaying and compactly supported blobs converge quickly to the singular Stokeslet in the far field, away from
; however, we will not consider these here as they do not give rise to such a practically useful expression at
(i.e., along the centerline of the fiber). Power law blob functions satisfying additional moment conditions may be constructed, which lead to improved convergence to singular Stokeslets in the far field [
33,
34]. However, a similar result to Theorem 1 holds even for these blobs, as we will discuss further in Remark 2. As such, for the remainder of this paper we will be considering in detail the regularized Stokeslet of the form (
20).
Given that regularized Stokeslets are everywhere smooth by construction, it is natural to consider using them in slender body theory as a simple fix for the aforementioned difficulties arising due to the singular nature of (
7) along the fiber centerline. Various authors [
7,
12,
13,
27,
28] have developed and studied versions of SBT based on regularized Stokeslets, although our approach differs in that we consider a regularized doublet correction as in [
27,
28], but also place our analysis within the context of the slender body PDE framework and consider the convergence of the flow about the slender body as
as well.
As mentioned, to best approximate the flow about
using regularized Stokeslets, we will still need some form of higher order correction, since (
20) alone still gives rise to
angular dependence along the surface of the fiber. Thus we also need to make use of regularized doublets. In analogy to (
6), we will define a regularized doublet as the 1/2 Laplacian of a regularized Stokeslet. Note that this definition differs slightly from [
5,
7,
28], where the doublet is defined as the negative Laplacian of a regularized Stokeslet. Here we use
rather than
for ease of comparison with classical SBT; note that due to the choice of doublet coefficient () the final expression (
22) for regularized SBT is exactly the same as in [
7,
28].
It turns out that to best serve the purpose of asymptotically cancelling certain unwanted
terms arising from the regularized Stokeslet in SBT, it often makes sense to use a different blob function to derive the regularized doublet [
2,
28]. In particular, the regularized doublet corresponding to (
20) for the purposes of SBT is given by
which arises from the blob function
Again, the purpose of a doublet correction in SBT is to asymptotically cancel undesired
terms at the fiber surface that arise from integrating the regularized Stokeslet over the fiber centerline. In classical SBT, there is just one such undesired term, which arises due to the
-dependence of
on
. In regularized SBT, different choices of regularized Stokeslets give rise to additional
terms, which require cancellation. In the case of (
20), for example, the additional
term also requires cancellation.
In analogy to classical SBT (
7), we may then consider the following approximation to the flow about the slender body
using the regularized Stokeslet (
20) and regularized doublet (
21) [
28]:
Now the kernel of (
22) is smooth along the fiber centerline; in particular, to obtain an expression for the velocity of the filament itself, we can simply evaluate (
22) at
. Note that in order to achieve the desired cancellation properties with the regularized doublet, the doublet coefficient
must be different depending on whether we are considering points
along the fiber centerline or in the bulk fluid, up to and including the surface of the actual 3D fiber. This will be discussed further in Remark 1.
In addition to the velocity approximation (
22), a regularized approximation to the fluid pressure field about the slender body may also be defined. For the choice of blob function (
19), the regularized slender body pressure approximation is given by [
4]
Note that we have rewritten the pressure tensor from [
4] to isolate the
term for ease of comparison with the non-regularized counterpart.
For a complete comparison between SBT based on regularized Stokeslets (
22) and its classical counterpart (
7), we will also consider the force-per-unit-length along the surface of the fiber due to the regularized Stokeslet velocity and pressure fields. For
, we define the force density
analogously to (
13) as
Here
is the unit vector normal to the fiber surface at
, which points into the slender body. Each of
,
,
, and
are as defined in (
14), (
22), (
24) and (
3), respectively.
Note that the analogous force-per-unit-length due to classical SBT, which we denote
, may be defined similarly to (
25) without issue, since the expressions are evaluated on the fiber surface rather than centerline and thus are not singular. From [
35], we have that
satisfies
The estimate (
26) is an essential ingredient in proving the convergence estimates (
15) and (
16) to the slender body PDE solution, and therefore we are also interested in determining what type of estimate holds in the case of regularized Stokeslets.
1.3. Statement of Main Result
Our main result is the following theorem.
Theorem 1. Consider a slender body satisfying the geometric constraints of Section 1.1. Given a line force density , let be the slender body approximation (22) due to the method of regularized Stokeslets, using (20) and (21) as the regularized Stokeslet and doublet, respectively. Let and be the bulk and centerline velocity expressions, respectively, due to classical SBT (see (7) and (9)). The following series of estimates holds. - (a.)
(Centerline difference) Along the fiber centerline , the difference between and satisfies In particular, if the regularization δ is proportional to ϵ, then in fact is necessary to eliminate an discrepancy between the fiber velocity approximations.
- (b.)
(Surface difference) For , along the actual surface of the fiber, the difference satisfies Here there is an discrepancy that cannot be eliminated by any choice of .
- (c.)
(Force difference) Along the fiber surface , the regularized force density (25) satisfies - (d.)
(Bulk difference decay) For any fluid point that is a distance , , away from the fiber centerline, if can be uniquely represented in the fiber frame (1) (i.e., there exists a unique closest point to on the fiber centerline), then In particular, for , we obtain convergence.
The main takeaways of Theorem 1 can be summarized estimate-by-estimate as follows.
a. (
Centerline difference, estimate (27)) The regularized Stokeslet approximation
for the velocity of the fiber itself can be made to agree asymptotically with the classical Keller–Rubinow expression (
9) (and hence the fiber velocity given by the slender body PDE as well, due to estimate (
16)), but only for the choice of regularization parameter
. In particular, choosing
,
, leads to an
discrepancy between classical SBT and the method of regularized Stokeslets as
; specifically, a difference of the form
. The necessity of choosing
here stems from the fact that the leading order behavior of SBT scales like
and is thus very sensitive to small perturbations.
This behavior may be contrasted with that of the parameter
in the Tornberg–Shelley formulation (
10) and also in Andersson [
42]. Note that in both formulations,
may be taken to be larger than 1 (in fact,
is used in (
10)) and both velocity expressions still converge to the slender body PDE solution (
13) by (
16). This is because the effect of
is cancelled by the local
term in (
11) or by the
in the denominator of the second term of the integrand in (
10) (note that this term can be integrated asymptotically to yield a similar local
term). In particular, the leading order effect of inserting the parameter
is cancelled, which preserves the asymptotic consistency with Keller–Rubinow SBT (
9) for values of
besides
.
b. (
Surface difference, estimate (28)) However, at the surface
of the slender body, there is always an
discrepancy between classical SBT and the method of regularized Stokeslets for any choice of
proportional to
of the form
. In particular, due to takeaway
, the fiber velocity
actually differs from the velocity at the fiber surface by an
quantity, i.e., there is no sense of 3D structure to the filament, and the slender body PDE assumption (
13) of a constant velocity across fiber cross sections is not even approximately satisfied.
Again, since the leading order term of SBT blows up like
for small
, other methods that capture this leading order behavior may still differ by an
quantity. The presence of an additional
in each denominator of (
20) and (
21) when evaluating on the fiber surface
(i.e., the denominators look like
) means that the surrounding fluid behaves as if the fiber actually has a thickness of
rather than
. Because of the logarithmic leading order behavior (coming from integrating
along the centerline), this is not a small perturbation even when
. Note that this discrepancy is also apparent in the asymptotic analysis in Cortez–Nicholas [
28], where the authors perform an asymptotic expansion of (
22), evaluated at the fiber surface
, about
and obtain the same logarithmic disagreement with classical SBT (
9) in the local term. Note that the claim following [
28], Equation (
23), that this disagreement can be cancelled for a periodic fiber with a particular choice of
is not true, as the resulting expression does not agree with the
periodic Keller–Rubinow expression (
9), where the local logarithmic coefficient should be of the form
. This discrepancy can, however, be avoided by using the centerline evaluation of (
22) as the fiber velocity instead.
c. (
Force difference, estimate (29)) The nonconvergence of regularized SBT to both classical SBT and the slender body PDE as
is further manifested in the force estimate (
29) along
. Instead of recovering the prescribed force density
at the fiber surface as in (
26), the method of regularized Stokeslets spreads the prescribed force density
into the surrounding fluid domain, giving rise to an additional body force in the fluid [
34]. If
, for example, then
of
is recovered at the surface of the filament, while the rest of the forcing is spread into the fluid bulk. In particular, SBT based on the method of regularized Stokeslets does not (asymptotically) satisfy the energy identity (
14) associated with swimming in Stokes flow.
d. (
Bulk difference decay, estimate (30)) Despite the
discrepancy at the fiber surface, due to (
30) we have that the difference in velocity expressions at any fluid point
near but not on the surface of the fiber actually does converge to 0 as
. The rate of convergence (in
) goes to zero as
approaches the fiber surface. Due to this decay estimate (
30) and to the small magnitude of the
difference
at the fiber surface (note that when
, for example, this difference is
), the discrepancy between the flows due to regularized and classical SBT may not have a qualitatively noticeable effect in practice. In particular, numerical demonstrations in
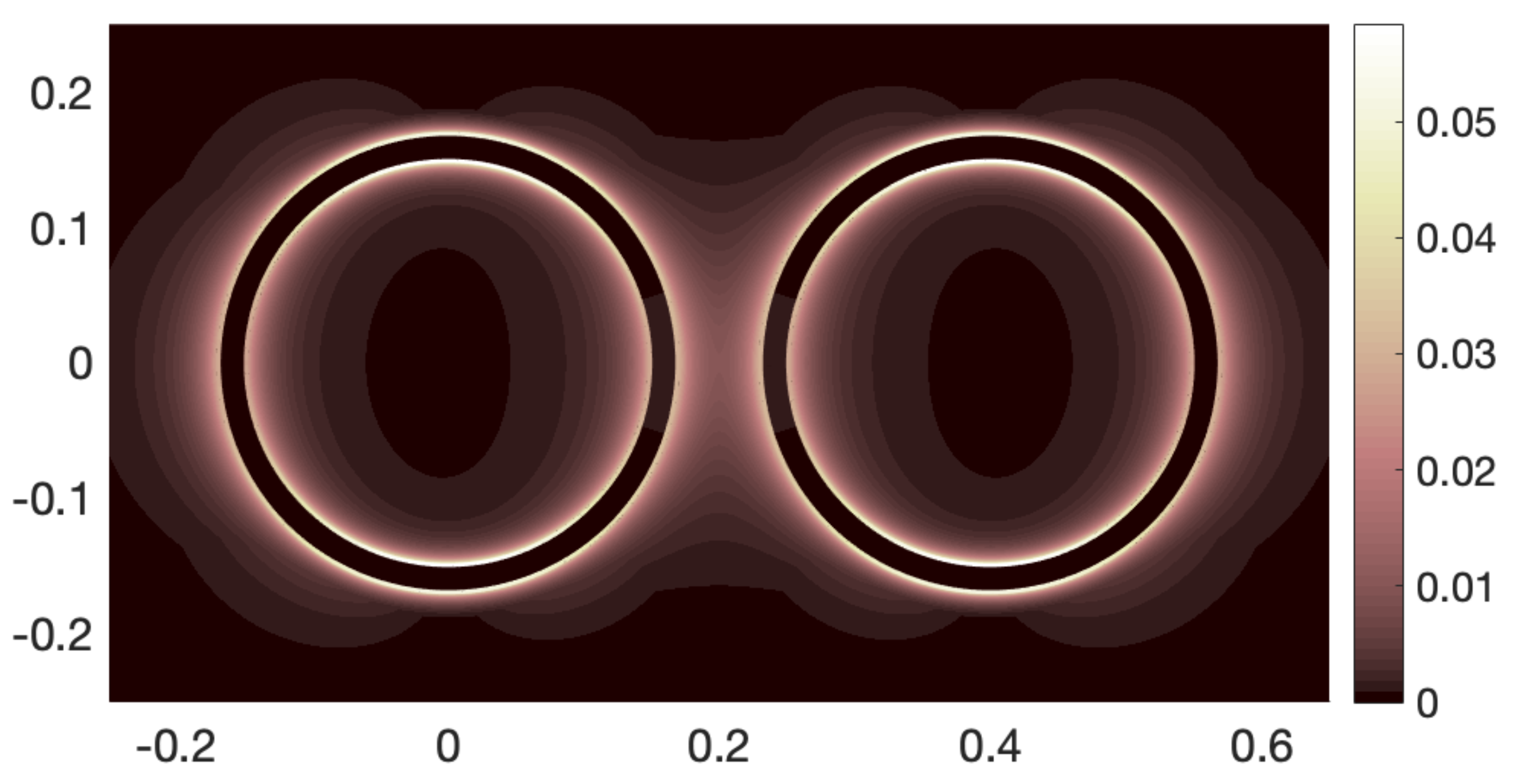
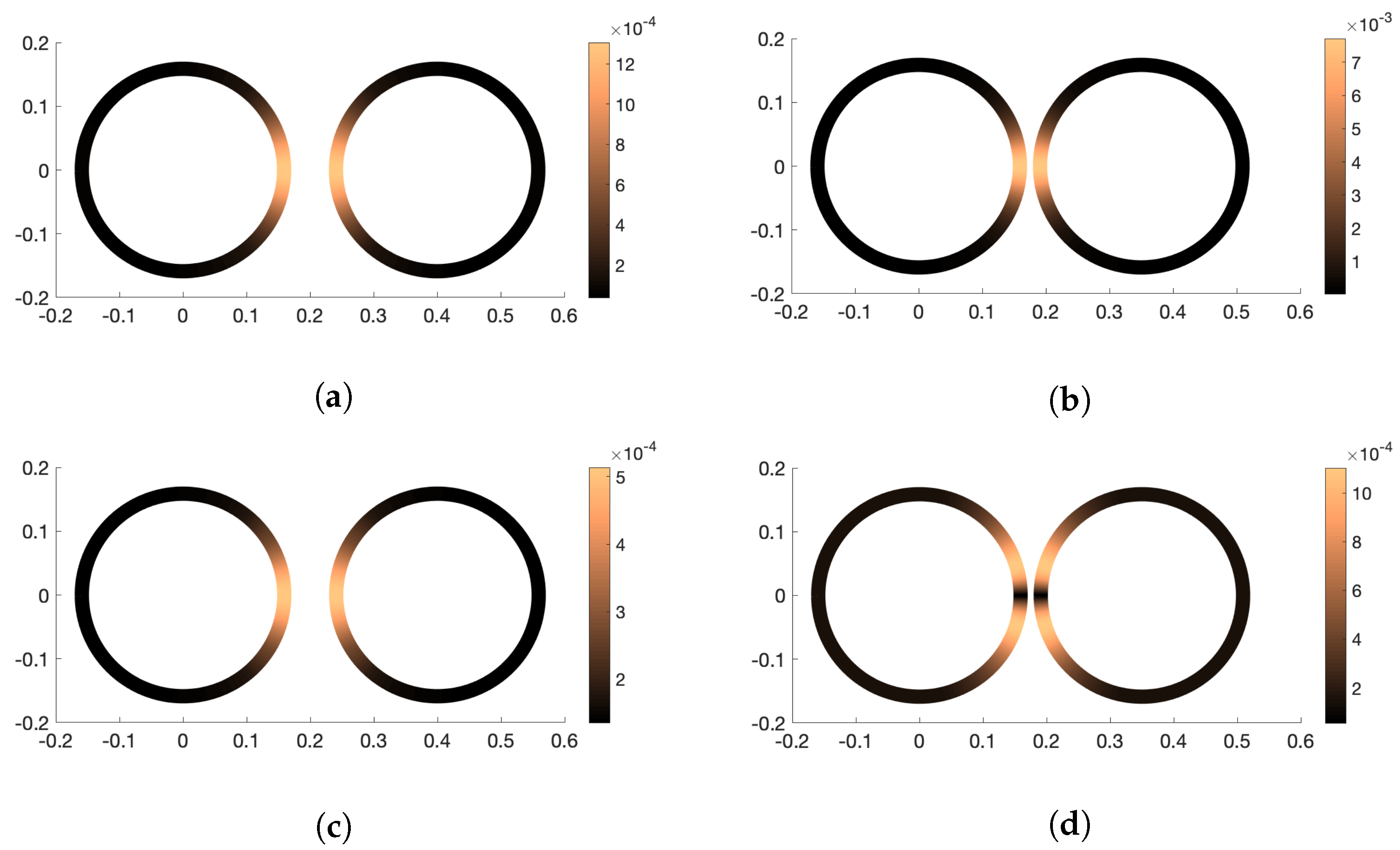
Section 3 indicate that even when multiple fibers interact hydrodynamically, the discrepancy between regularized and classical SBT may not be large enough to produce significantly different velocity fields around the fibers.
Remark 1 (Doublet coefficient).
We would like to address the different choice of doublet coefficient for the bulk versus centerline expressions in regularized SBT (22). If the same coefficient is used for both expressions, then there will be an additional quantity appearing in either the centerline or bulk expression (depending on which coefficient is used) that is not cancelled asymptotically. For example, if the centerline doublet coefficient is used in the bulk, then a termmust be added to the given in (22). Using Lemma 1, which will be introduced in Section 2, this term can be shown to contribute an term of the format the fiber surface. Although the term can be eliminated by choosing , this term still gives rise to an even greater discrepancy than (28) with classical SBT. Similarly, if the bulk coefficient is used instead along the fiber centerline, then an additional termis added to the centerline expression (22), which can be shown (again via Lemma 1 in Section 2) to have an contributionto the fiber velocity. Again, only the term may be eliminated by choosing . Note that the need to choose different doublet coefficients removes one of the apparent benefits of regularized SBT, however; namely, the same kernel cannot be used to describe both the fiber velocity and the flow around it. Remark 2 (Other blob functions).
The results of Theorem 1 hold even for power law blobs satisfying additional moment conditions that lead to better convergence (in terms of δ) to singular Stokeslets in the far field. For example, we may consider the blobwhich gives rise to the regularized Stokeslet The regularized doublet corresponding to (32) (in the sense of the cancellation properties discussed following Equation (21)) is given byand arises from the blob function Note that we are again defining the regularized doublet as the Laplacian of the regularized Stokeslet, rather than the Laplacian. Both of the above blobs are constructed to have a vanishing second moment, i.e.,which has been shown to yield regularized Stokeslets and doublets with improved convergence to their non-regularized counterparts as [33,34]. We may consider using (32) and (33) in the regularized SBT expression (22) in place of (20) and (21). However, the logarithmic discrepancy noted in Theorem 1 remains: it is fundamentally a local issue rather than a decay issue, stemming from the additional δ present in the regularized Stokeslet denominator when evaluating at the fiber surface. It is the behavior of regularized Stokeslets at distances from the fiber centerline that causes disagreement between regularized and classical SBT. Using a blob function that is compactly supported within the slender body would likely remedy this issue, but at the expense of simplicity and some practical utility. The remainder of the paper is structured as follows. In
Section 2, we prove Theorem 1, beginning in
Section 2.1 with some preliminary definitions and a key lemma based on [
35]. We then proceed to show each of the velocity estimates in
Section 2.2 and the force estimate in
Section 2.3. We conclude with a numerical study of the difference between regularized and classical SBT to assess the practical implications of Theorem 1.






{kind=link}
{kind=link}
{kind=link}
{kind=link}