
Efficient Wildland Fire Simulation via Nonlinear Model Order Reduction


Abstract
:1. Introduction
- In Section 4.2, we extend DEIM by approximating the nonlinearity of the full-order model (FOM) by a linear combination of dynamically transformed ansatz functions to account for the advective transport within the system. Furthermore, we discuss how the state-dependent ROM coefficient matrices can be replaced with cheap to evaluate approximants, see Section 4.1. Altogether, the proposed methodology allows for constructing parameter-dependent ROMs while achieving an efficient offline/online decomposition.
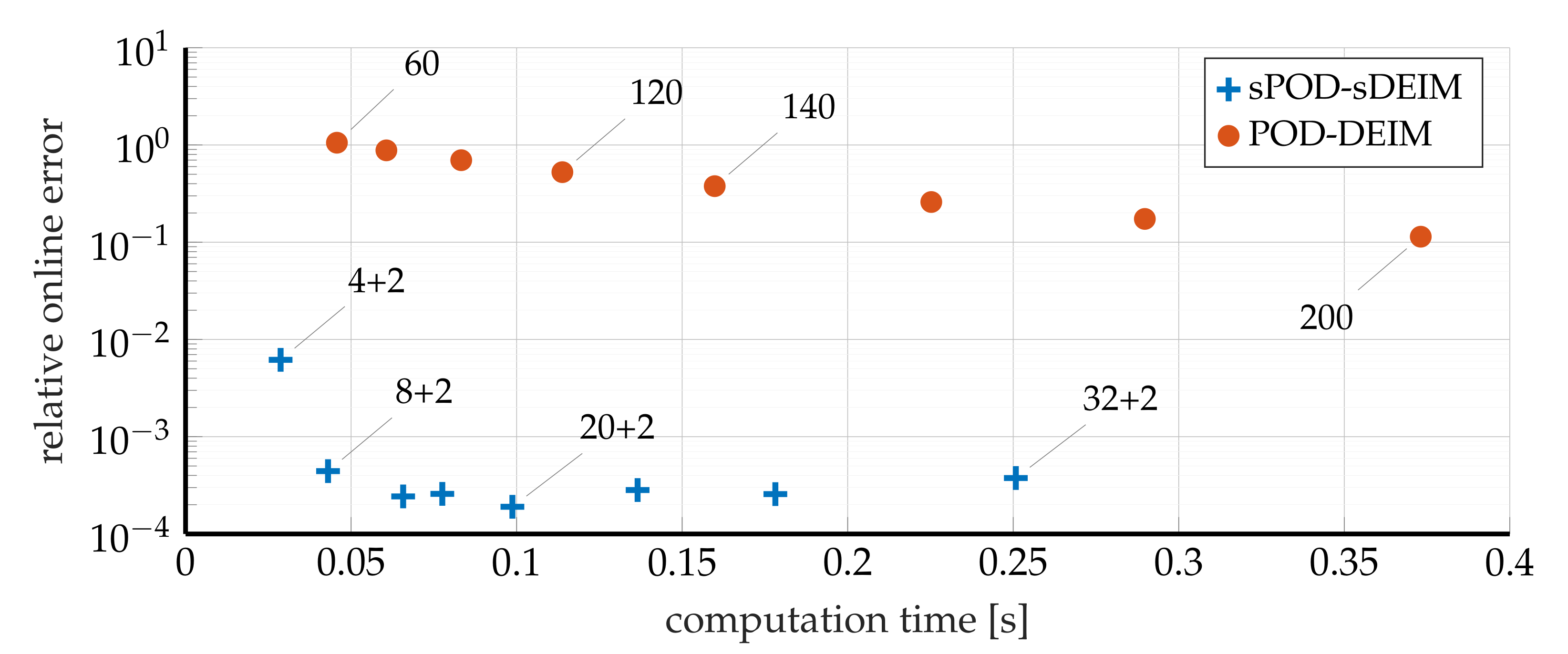
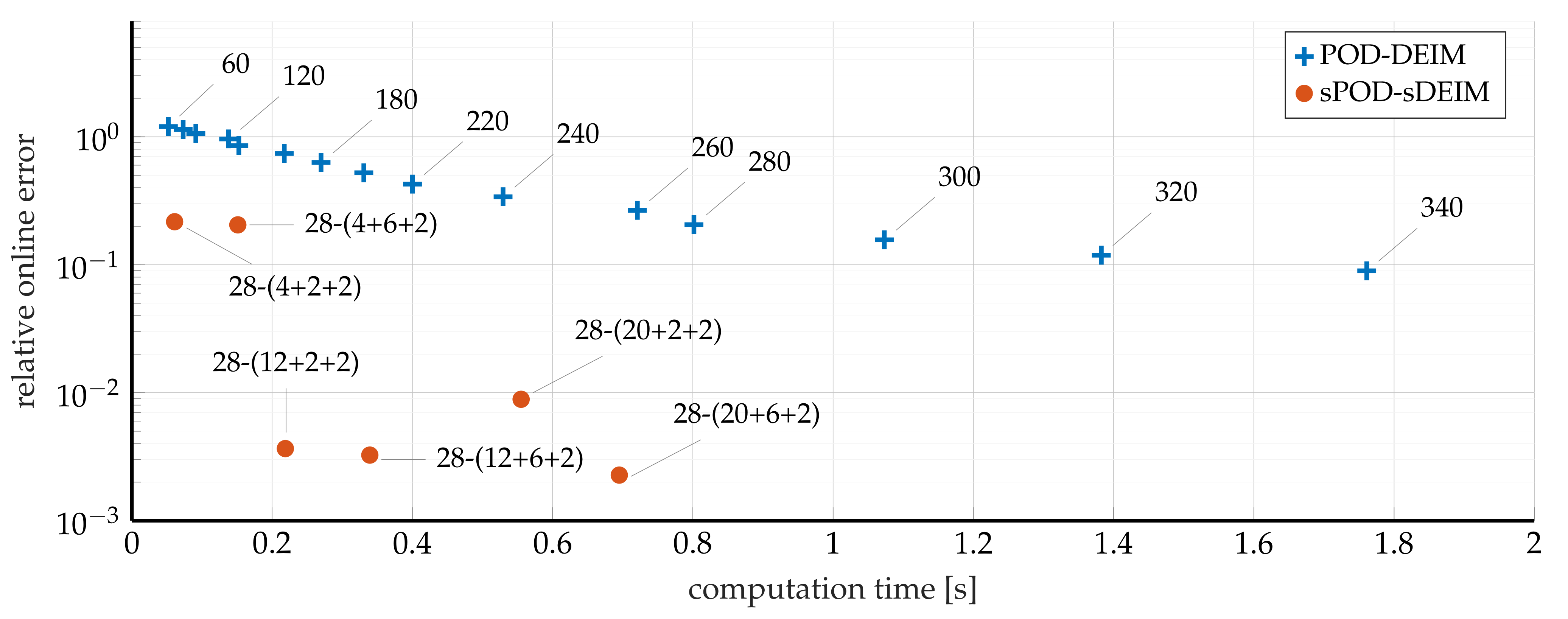
- Based on the new approach, we construct low-dimensional parameter-dependent ROMs for a wildland fire model, see Section 5. Depending on the initial condition, the model inherits complex dynamics that do not allow for a simple separation of transported and non-transported effects, thus rendering this a challenging benchmark problem. Following ideas from [33], we propose a switching strategy, using our method solely in the transport-dominated regime, see Section 5.4 for further details. The constructed ROMs allow for accurate predictions within the parameter space and prove to be faster and more accurate than POD-DEIM ROMs, which are based on classical linear subspace approximations.
Notation
2. Problem Setting—Wildfire Model
- The term is a diffusion term modeling the short-range heat transfer by radiation and turbulence.
- The term accounts for the advective heat transfer caused by the wind with wind speed v.
- The loss of fuel due to burning is modeled by the product of the supply mass fraction and the reaction rate constant, which is modeled with the modified Arrhenius law (5).
- The term models heat lost to the atmosphere due to convection. It is assumed that heat loss to the atmosphere due to radiation is negligible compared to heat loss due to convection, such that the previous term is sufficient to account for both effects.
3. Preliminaries
3.1. Projection-Based MOR and Proper Orthogonal Decomposition
3.2. Efficient Approximation of Nonlinear Terms
3.3. Nonlinear MOR via Transformation Operators
4. Efficient Offline/Online Decomposition
4.1. Efficient Approximation of Path-Dependent Matrices
4.2. DEIM with Transformation Operators
5. Numerical Experiments
5.1. Code Availability
5.2. MOR for Wildfire Model
| Algorithm 1 Offline path determination | |
| Input: temperature snapshot data T, time offset | |
| Output: path p | |
| 1: | Define and . |
| 2: | Compute
|
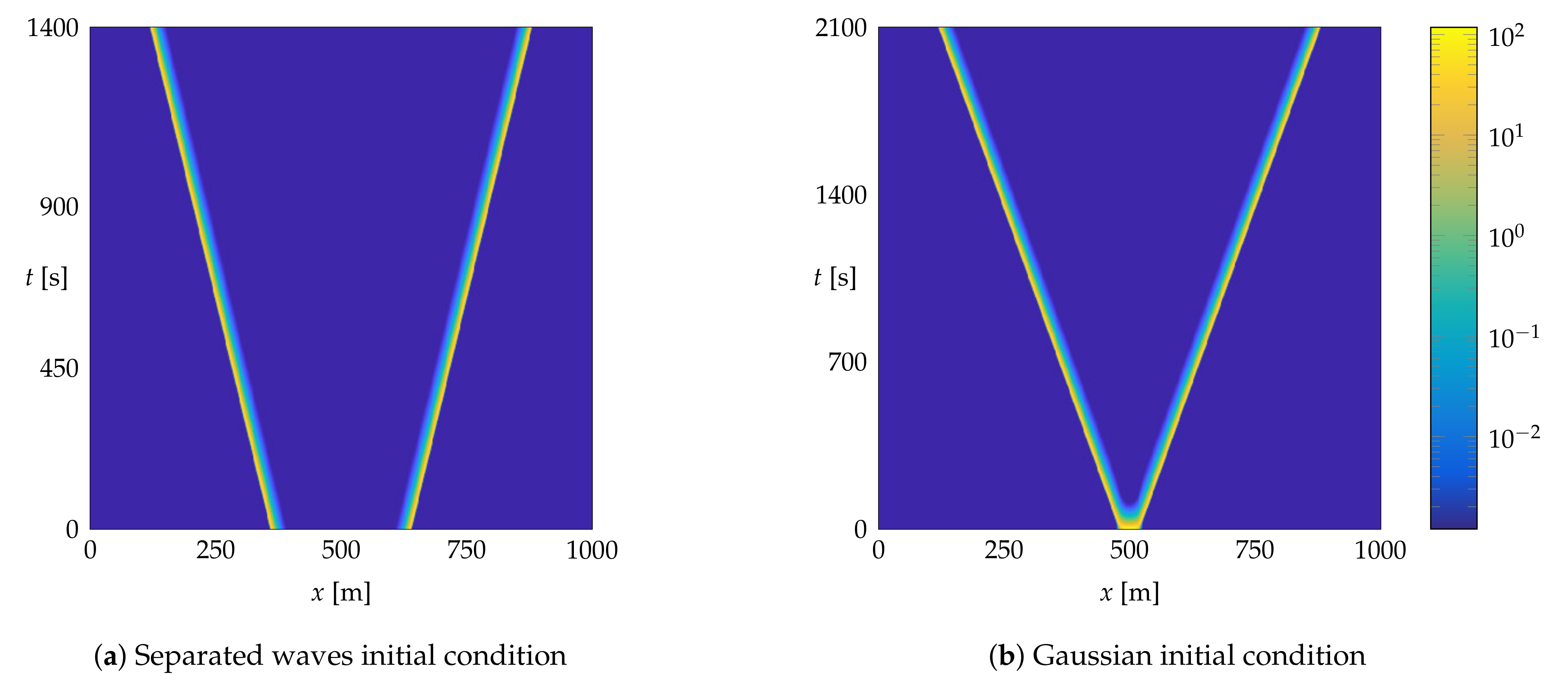
5.3. Initial Condition with Traveling Wave Solution
5.3.1. Determination of Modes
5.3.2. Efficient Offline/Online Decomposition
5.3.3. ROM Simulations
- the computation of the path variables and determination of the modes in the offline phase,
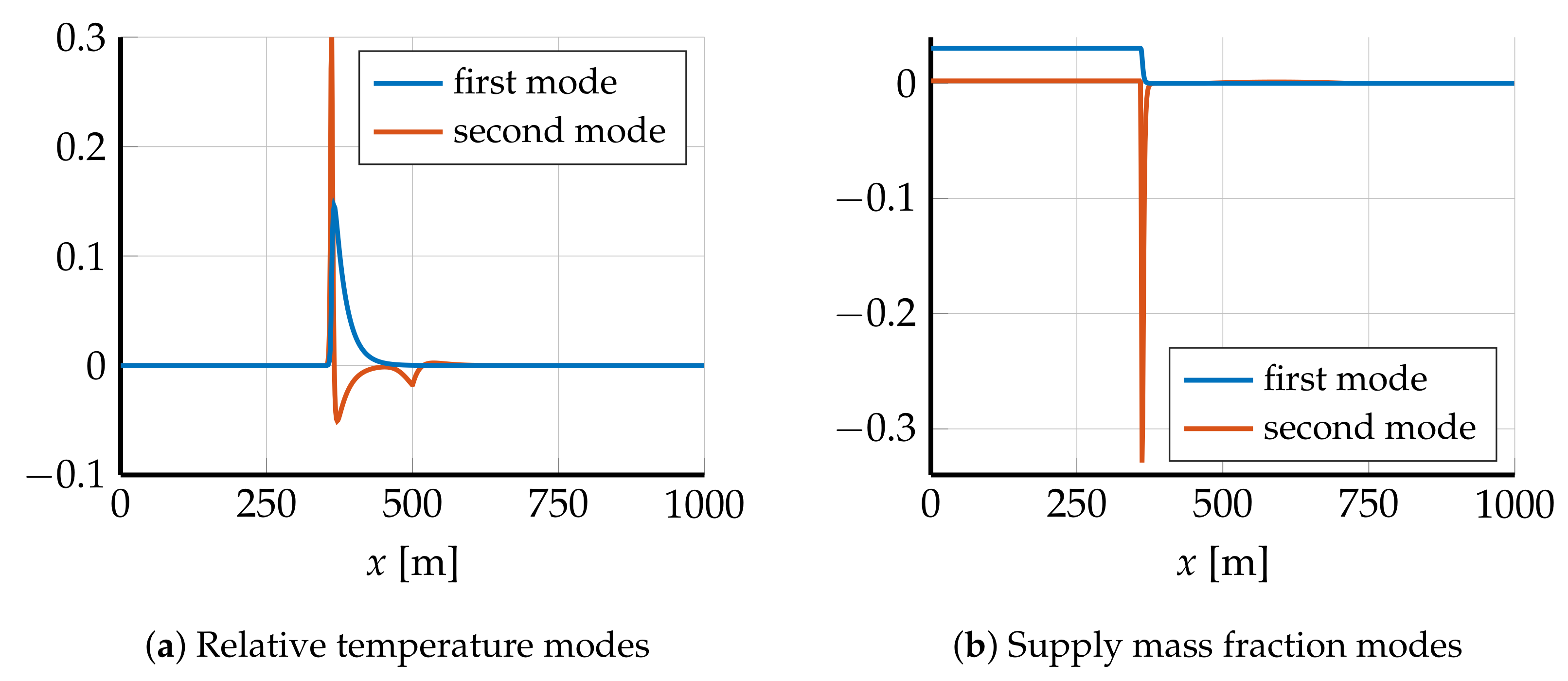
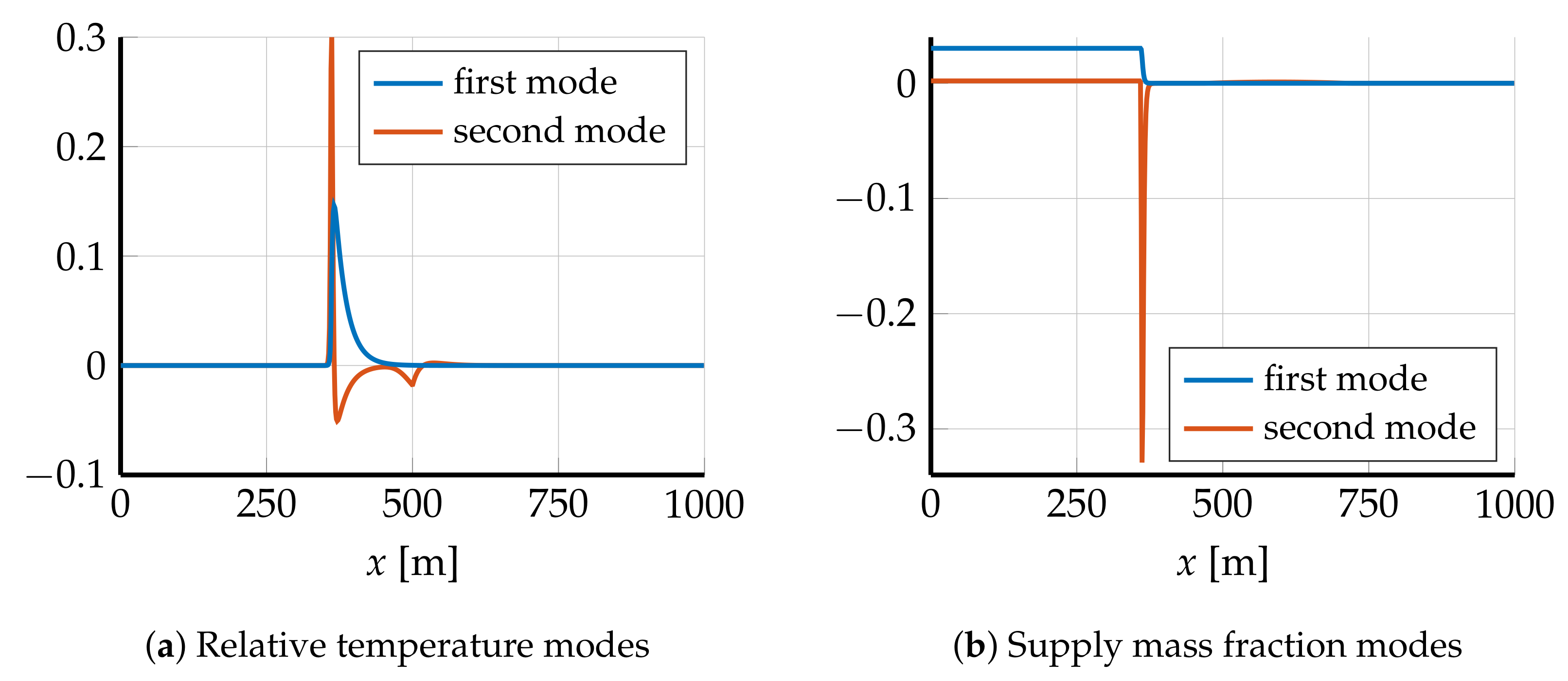
- the spatial discretization error in the offline phase (the second mode in Figure 2 details even steeper gradients than the first mode),
- the hyper-reduction errors (assembly of the path-dependent matrices and approximation of the FOM nonlinearity), and
- the temporal discretization error in the online phase, in particular with respect to the path variables.
5.4. Initial Condition with Combined Traveling and Non-Transported Effects
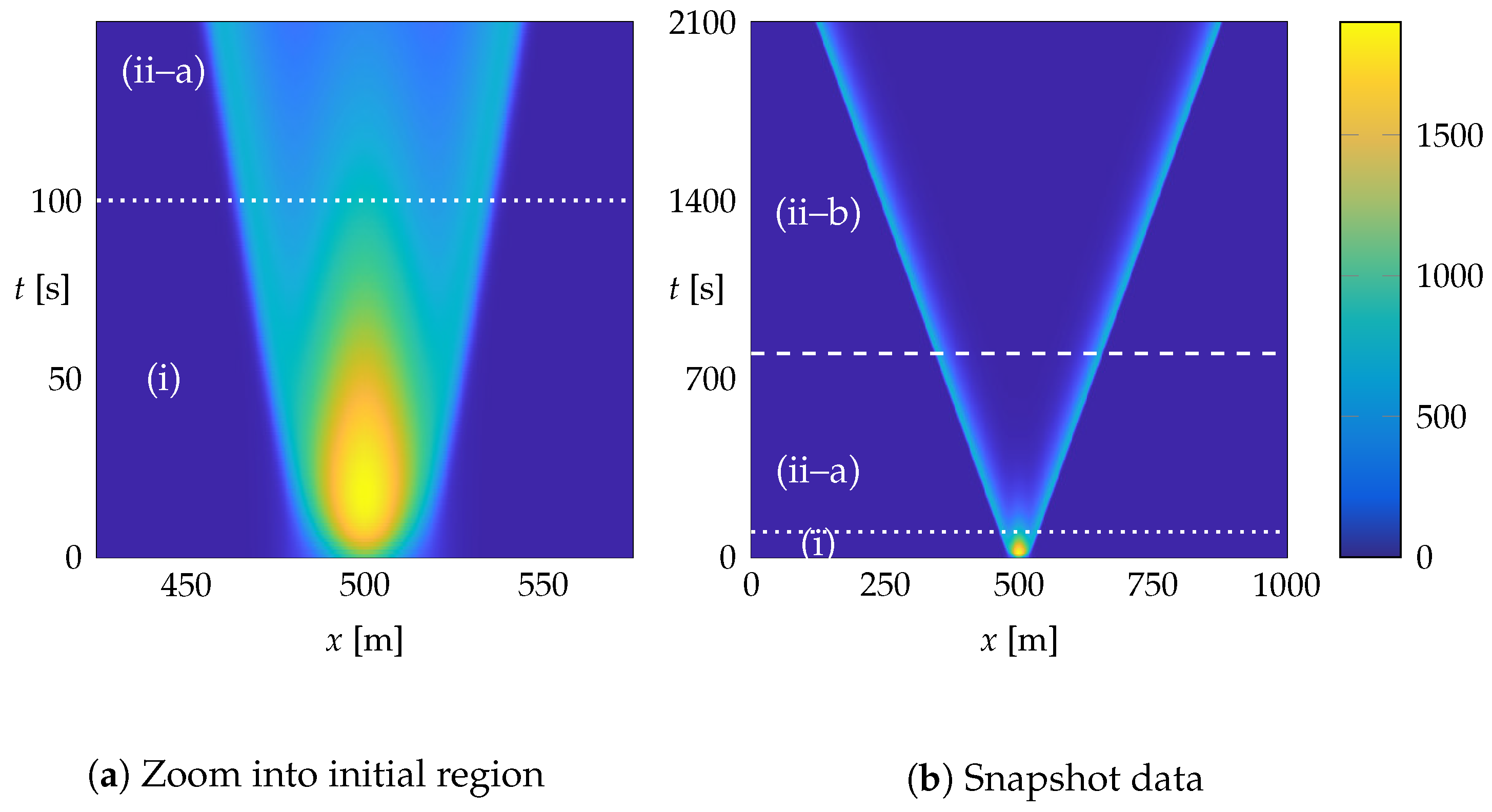
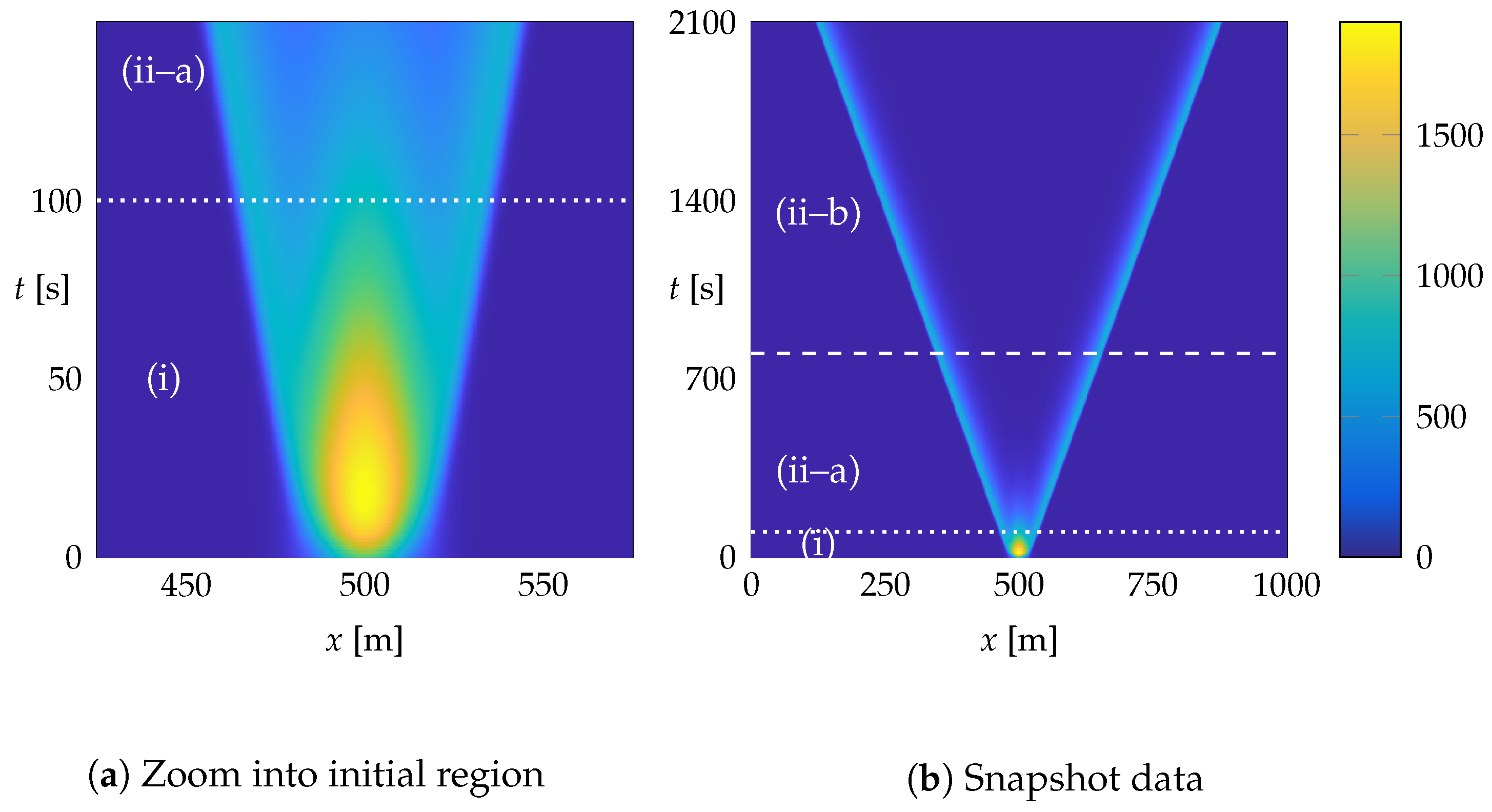
- In the beginning of the time interval, i.e., in the area (i) in Figure 7a, we approximate the wildland fire model with standard POD-Galerkin, as described in Section 3.2.
- As soon as a separation of the ignition and the waves is possible, i.e., in areas (ii–a) and (ii–b) in Figure 7b, we use our ROM with transformation operators to capture the two wave fronts and add additional POD modes, as described in Remark 3, for the remaining dynamics.
5.4.1. Determination of Modes
- Step 1
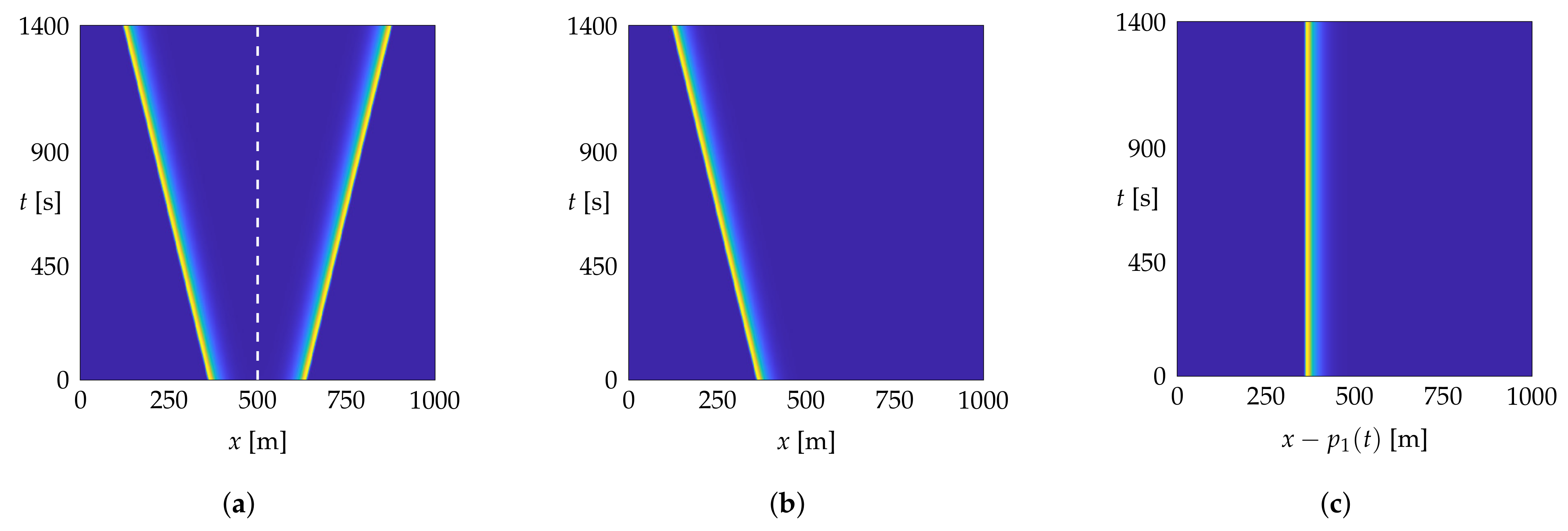
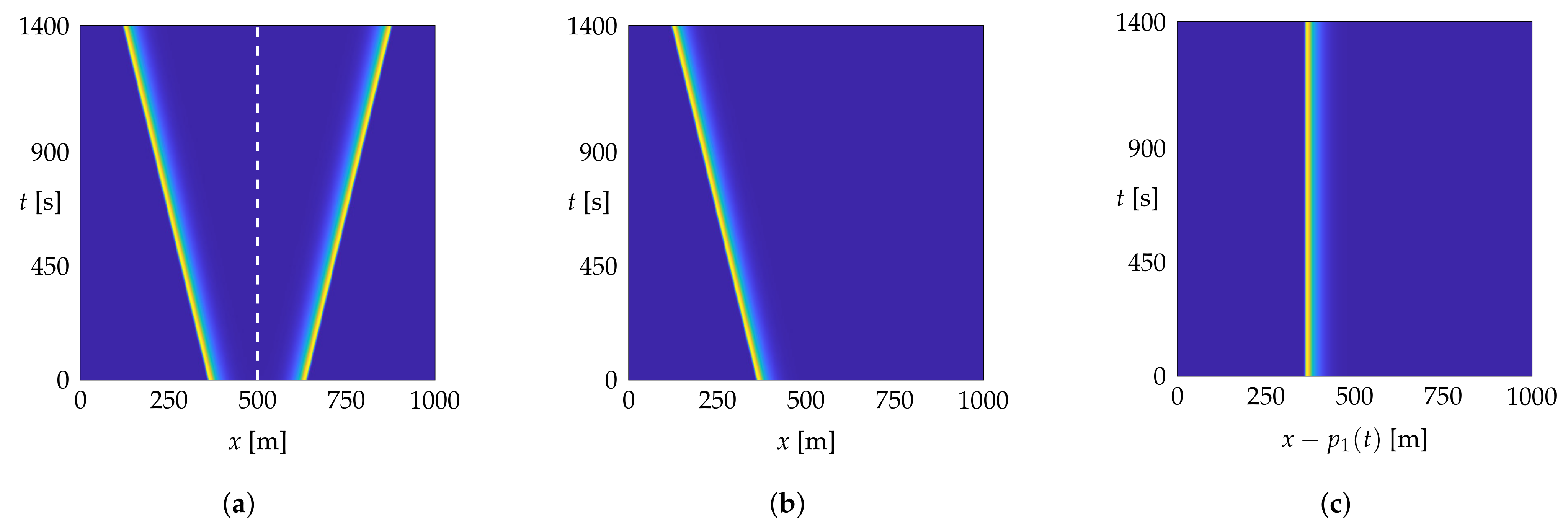
- In area (ii–b) in Figure 7b, we proceed with the heuristic discussed in Section 5.3.1, i.e., we separate the two combustion waves by dividing the computational domain in the middle, replacing the missing parts with zeros, and then shift accordingly. For an illustration, we refer to Figure 3. In the shifted frame, i.e., in Figure 3b, we apply standard POD to obtain the transformed modes .
- Step 2
- To eliminate the traveling waves also from the area (ii–a), we fit a low-degree polynomial to the coefficients in the time interval (ii–b) (computed in Step 1) and use the resulting polynomial to extrapolate the coefficients to the time interval corresponding to (ii–a).
- Step 3
- We use the modes (determined in Step 1) and the coefficients (determined in Step 1 and Step 2) to subtract the traveling wave approximation (16) from the snapshot data and apply standard POD to capture the remaining non-transported effects.
- The above strategy (and similarly the method in Section 5.3.1) will, in general, not provide a minimizer for the optimization problem (15). Nevertheless, these heuristic methods can be computed efficiently and deliver satisfactory results. In contrast, techniques that are based on solving the minimization problem (15) or related minimization problems, cf. [29,30], involve expensive iterative solvers for an optimization problem, whose number of parameters scales with the dimension of the spatial and temporal discretization.
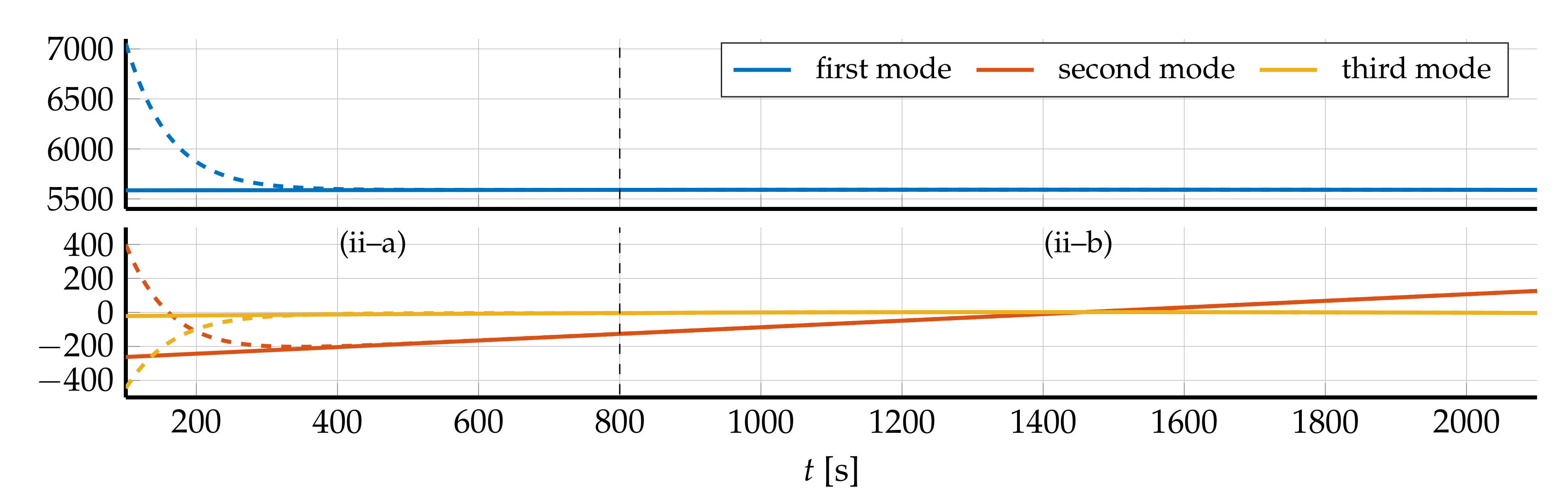
- The three-step procedure outlined above is a greedy-type approach since we first determine the transformed modes to capture the traveling waves and afterwards approximate the rest via POD. If we would only use transformed modes without adding POD modes, then it would be optimal to determine the coefficients of the transformed modes in area (ii–a) via orthogonal projection. Instead, we determine them via extrapolation (cf. Step 2) and observed in the numerical experiments that this is advantageous in terms of the offline and the online error. The main reason for this appears to be that, if we simply project, then the non-transported effects are, in parts, also approximated by the transformed modes, which in turn leads to a worse POD approximation in Step 3. A comparison between the extrapolated and the projected coefficients of the first three modes for the left-going temperature combustion wave is given in Figure 8. In particular, we observe that the projected coefficients deviate strongly at the beginning of area (ii–a), which indicates the influence of the non-transported effects in the middle of the computational domain, see also Figure 7a.
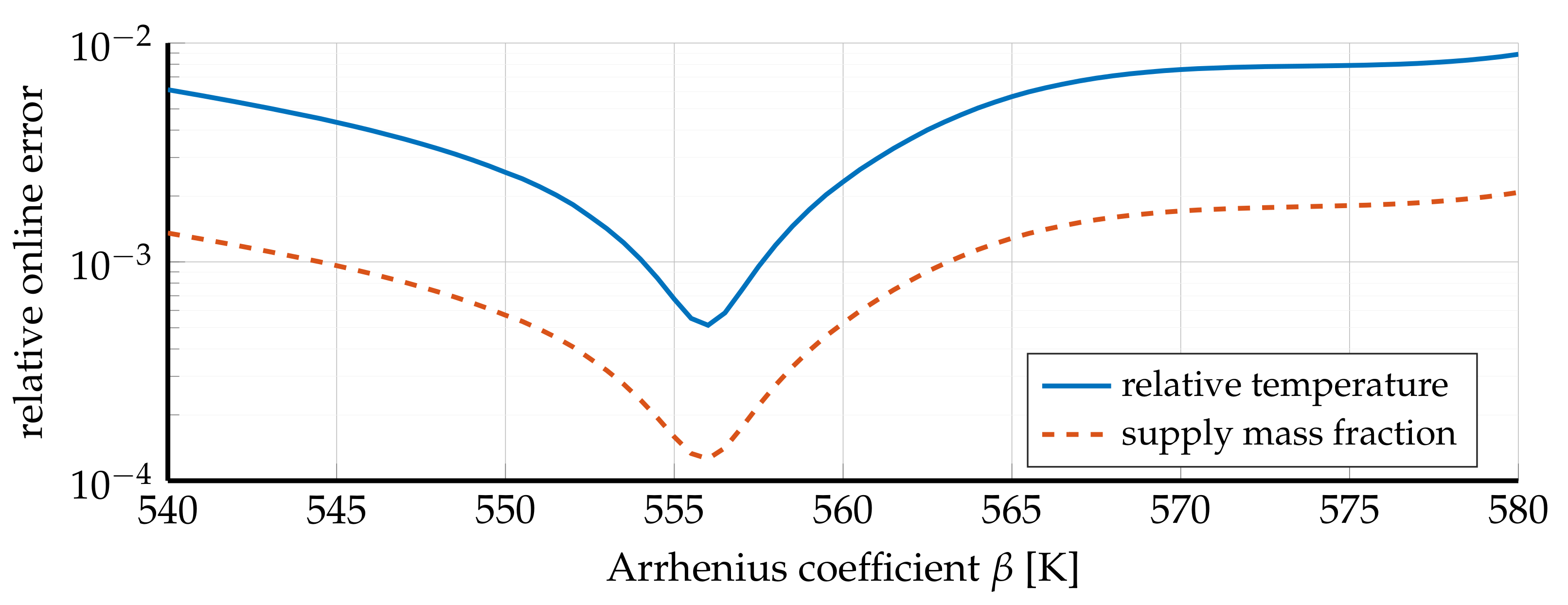
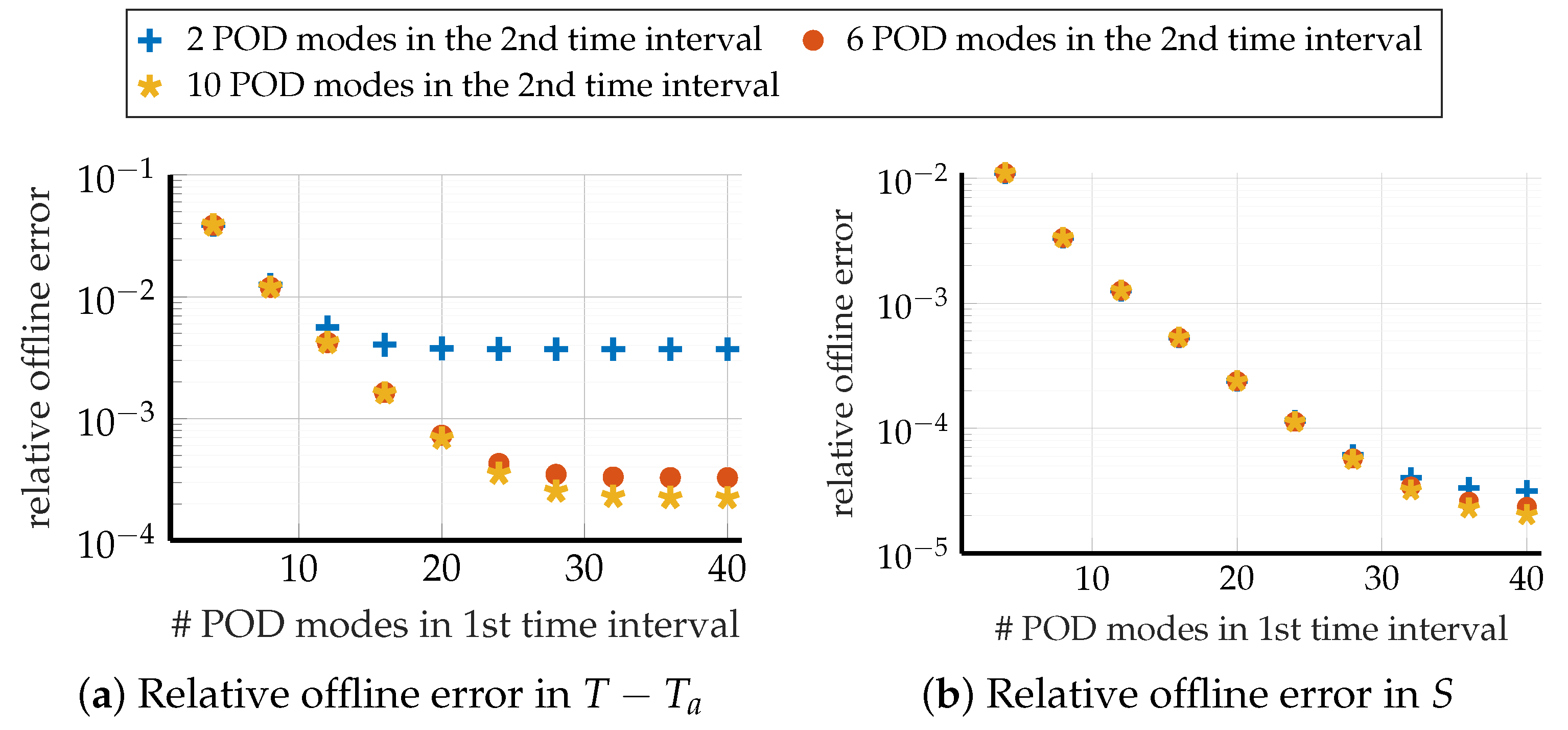
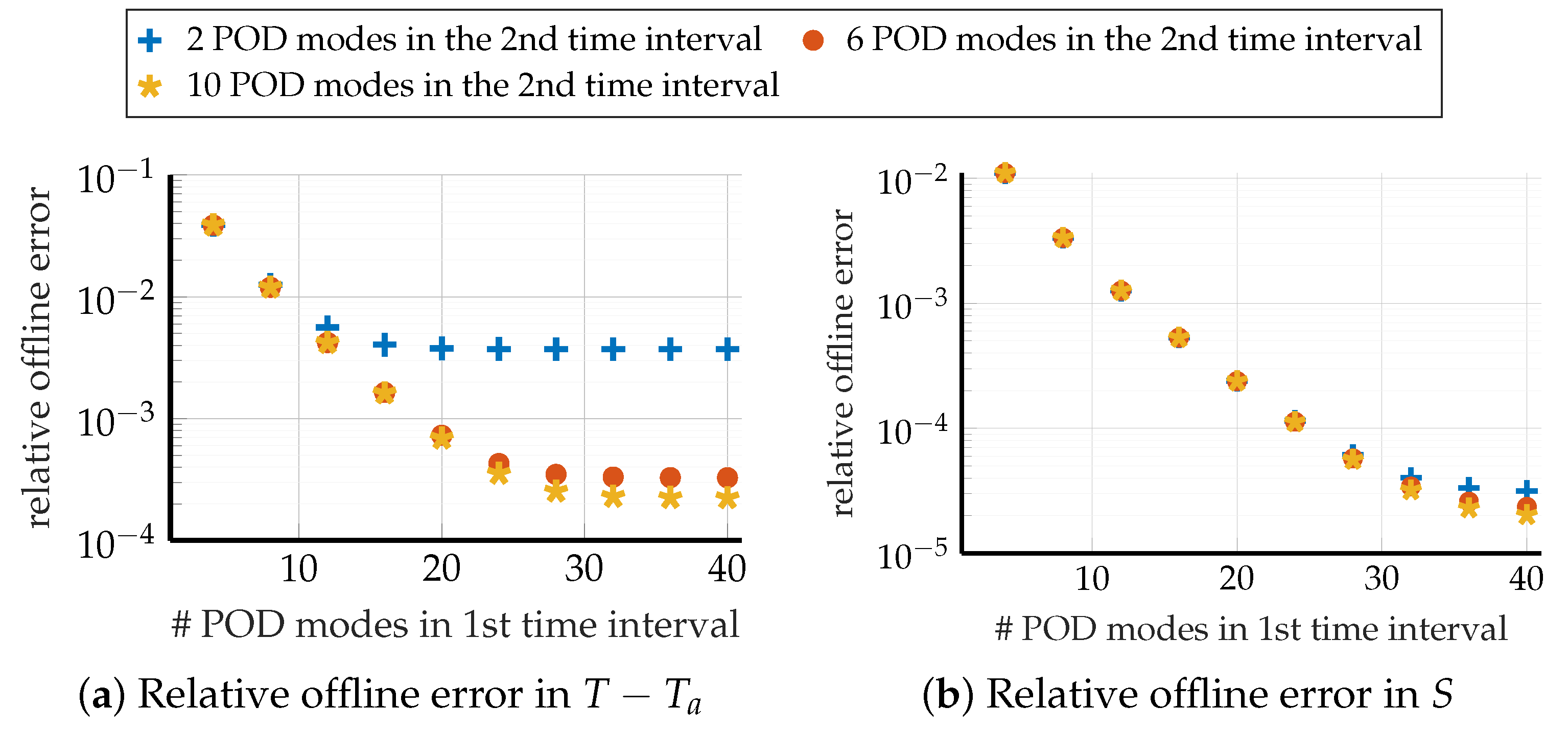
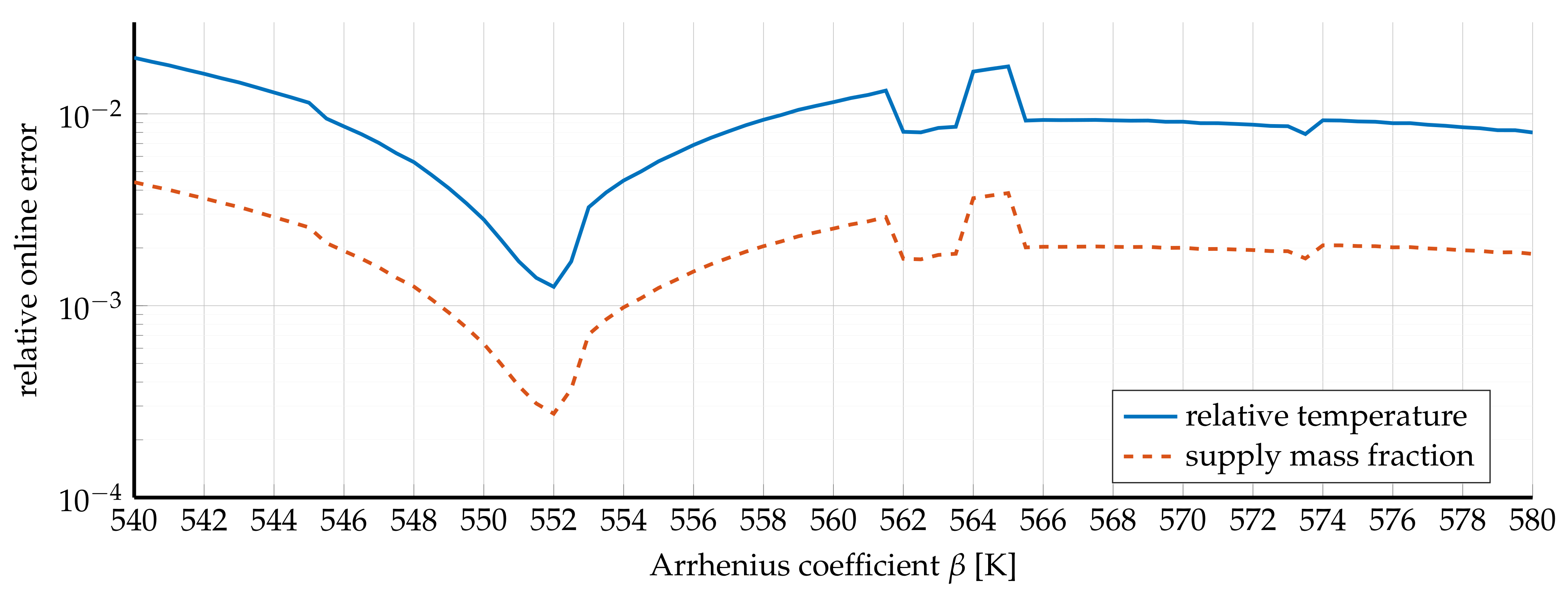
- In Figure 9, the offline errors are depicted for different choices for the number of POD modes in the first and in the second time interval. The results are based on three transformed modes per variable and frame and Arrhenius coefficient . We observe different error decays for the temperature and the supply mass fraction: The error decay in the temperature suggests that the numbers of POD modes chosen for the first and second time intervals should be adequately balanced. For instance, if only one POD mode per variable is chosen for the second time interval, it does not pay off to increase the number of used POD modes for the first time interval to values higher than 10, since, for higher values, the errors stagnate. In contrast, the error decay for the supply mass fraction seems to indicate that the error is more or less independent from the number of POD modes used in the second time interval. These different behaviors in the temperature and supply mass fraction error are likely because, at the beginning of the second time interval, there is still a fading temperature peak in the middle of the computational domain. However, this peak is not reflected in the supply mass fraction, which is already almost entirely consumed in the middle of the computational domain at the beginning of the second time interval. Consequently, adding POD modes in the second time interval is especially valuable for approximating the temperature but less significant for the supply mass fraction. Despite this observation, we decide, for simplicity, to always take the same number of modes for the temperature and for the supply mass fraction while noting that there is some unexploited potential for further improvement.
5.4.2. Efficient Offline/Online Decomposition
5.4.3. ROM Simulations
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| DEIM | discrete empirical interpolation method |
| DOF | degrees of freedom |
| EIM | empirical interpolation method |
| FOM | full-order model |
| MOR | model order reduction |
| POD | proper orthogonal decomposition |
| ROM | reduced-order model |
| sPOD | shifted proper orthogonal decomposition |
| SVD | singular value decomposition |
References
- Perry, G.L.W. Current approaches to modelling the spread of wildland fire: A review. Prog. Phys. Geogr. 1998, 22, 222–245. [Google Scholar] [CrossRef]
- Mandel, J.; Bennethum, L.S.; Beezley, J.D.; Coen, J.L.; Douglas, C.C.; Kim, M.; Vodacek, A. A wildland fire model with data assimilation. Math. Comput. Simul. 2008, 79, 584–606. [Google Scholar] [CrossRef] [Green Version]
- Lattimer, B.Y.; Hodges, J.L.; Lattimer, A.M. Using machine learning in physics-based simulation of fire. Fire Saf. J. 2020, 114, 102991. [Google Scholar] [CrossRef]
- Antoulas, A.C. Approximation of Large-Scale Dynamical Systems; SIAM: Philadelphia, PA, USA, 2005. [Google Scholar] [CrossRef]
- Benner, P.; Cohen, A.; Ohlberger, M.; Willcox, K. Model Reduction and Approximation; SIAM: Philadelphia, PA, USA, 2017. [Google Scholar] [CrossRef] [Green Version]
- Hesthaven, J.S.; Rozza, G.; Stamm, B. Certified Reduced Basis Methods for Parametrized Partial Differential Equations; Springer: Cham, Switzerland, 2016. [Google Scholar] [CrossRef] [Green Version]
- Quarteroni, A.; Rozza, G. Reduced Order Methods for Modeling and Computational Reduction; Springer: Cham, Switzerland, 2014. [Google Scholar] [CrossRef]
- Quarteroni, A.; Manzoni, A.; Negri, F. Reduced Basis Methods for Partial Differential Equations: An Introduction; Springer: Cham, Switzerland, 2016. [Google Scholar] [CrossRef]
- Antoulas, A.C.; Beattie, C.A.; Güğercin, S. Interpolatory Methods for Model Reduction; SIAM: Philadelphia, PA, USA, 2020. [Google Scholar] [CrossRef]
- Kolmogoroff, A. Über die beste Annäherung von Funktionen einer gegebenen Funktionenklasse. Ann. Math. 1936, 37, 107–110. [Google Scholar] [CrossRef]
- Pinkus, A. n-Widths in Approximation Theory; Springer: Berlin/Heidelberg, Germany, 1985. [Google Scholar] [CrossRef]
- Unger, B.; Gugercin, S. Kolmogorov n-widths for linear dynamical systems. Adv. Comput. Math. 2019, 45, 2273–2286. [Google Scholar] [CrossRef] [Green Version]
- Maday, Y.; Patera, A.T.; Turinici, G. A priori convergence theory for reduced-basis approximations of single-parameter elliptic partial differential equations. J. Sci. Comput. 2002, 17, 437–446. [Google Scholar] [CrossRef]
- Greif, C.; Urban, K. Decay of the Kolmogorov N-width for wave problems. Appl. Math. Lett. 2019, 96, 216–222. [Google Scholar] [CrossRef] [Green Version]
- Lattimer, A.M.; Lattimer, B.Y.; Gugercin, S.; Borggaard, J.T.; Luxbacher, K.D. High Fidelity Reduced Order Models for Wildland Fires. In Proceedings of the 5th International Fire Behavior and Fuels Conference, Portland, OR, USA, 11–15 April 2016; International Association of Wildland Fire: Missoula, MT, USA, 2016; pp. 1–6. [Google Scholar]
- Ohlberger, M.; Rave, S. Nonlinear reduced basis approximation of parameterized evolution equations via the method of freezing. C. R. Acad. Sci. Paris 2013, 351, 901–906. [Google Scholar] [CrossRef] [Green Version]
- Taddei, T.; Perotto, S.; Quarteroni, A. Reduced basis techniques for nonlinear conservation laws. ESAIM Math. Model. Numer. Anal. 2015, 49, 787–814. [Google Scholar] [CrossRef]
- Rim, D.; Moe, S.; LeVeque, R.J. Transport reversal for model reduction of hyperbolic partial differential equations. SIAM/ASA J. Uncertain. Quantif. 2018, 6, 118–150. [Google Scholar] [CrossRef] [Green Version]
- Lee, K.; Carlberg, K.T. Model reduction of dynamical systems on nonlinear manifolds using deep convolutional autoencoders. J. Comput. Phys. 2020, 108973. [Google Scholar] [CrossRef] [Green Version]
- Cagniart, N.; Maday, Y.; Stamm, B. Model order reduction for problems with large convection effects. In Contributions to Partial Differential Equations and Applications; Chetverushkin, B.N., Fitzgibbon, W., Kuznetsov, Y.A., Neittaanmäki, P., Periaux, J., Pironneau, O., Eds.; Springer: Cham, Switzerland, 2019; pp. 131–150. [Google Scholar] [CrossRef]
- Nonino, M.; Ballarin, F.; Rozza, G.; Maday, Y. Overcoming slowly decaying Kolmogorov n-width by transport maps: Application to model order reduction of fluid dynamics and fluid structure interaction problems. arXiv 2019, arXiv:1911.06598. [Google Scholar]
- Black, F.; Schulze, P.; Unger, B. Projection-based model reduction with dynamically transformed modes. ESAIM Math. Model. Numer. Anal. 2020, 54, 2011–2043. [Google Scholar] [CrossRef]
- Peherstorfer, B. Model reduction for transport-dominated problems via online adaptive bases and adaptive sampling. SIAM J. Sci. Comput. 2020, 42, A2803–A2836. [Google Scholar] [CrossRef]
- Taddei, T. A registration method for model order reduction: Data compression and geometry reduction. SIAM J. Sci. Comput. 2020, 42, A997–A1027. [Google Scholar] [CrossRef] [Green Version]
- Welper, G. Transformed snapshot interpolation with high resolution transforms. SIAM J. Sci. Comput. 2020, 42, A2037–A2061. [Google Scholar] [CrossRef]
- Krah, P.; Sroka, M.; Reiss, J. Model Order Reduction of Combustion Processes with Complex Front Dynamics. In Numerical Mathematics and Advanced Applications ENUMATH 2019; Vermolen, F.J., Vuik, C., Eds.; Springer: Cham, Switzerland, 2021; pp. 803–811. [Google Scholar] [CrossRef]
- Miller, K.; Miller, R.N. Moving finite elements. I. SIAM J. Numer. Anal. 1981, 18, 1019–1032. [Google Scholar] [CrossRef]
- Reiss, J.; Schulze, P.; Sesterhenn, J.; Mehrmann, V. The shifted proper orthogonal decomposition: A mode decomposition for multiple transport phenomena. SIAM J. Sci. Comput. 2018, 40, A1322–A1344. [Google Scholar] [CrossRef] [Green Version]
- Reiss, J. Optimization-based modal decomposition for systems with multiple transports. SIAM J. Sci. Comput. 2021, 43, A2079–A2101. [Google Scholar] [CrossRef]
- Schulze, P.; Reiss, J.; Mehrmann, V. Model Reduction for a Pulsed Detonation Combuster via Shifted Proper Orthogonal Decomposition. In Active Flow and Combustion Control 2018; King, R., Ed.; Springer: Cham, Switzerland, 2019; pp. 271–286. [Google Scholar] [CrossRef] [Green Version]
- Barrault, M.; Maday, Y.; Nguyen, N.C.; Patera, A.T. An ‘empirical interpolation’ method: Application to efficient reduced-basis discretization of partial differential equations. C. R. Math. Acad. Sci. Paris 2004, 339, 667–672. [Google Scholar] [CrossRef]
- Chaturantabut, S.; Sorensen, D. Nonlinear model reduction via discrete empirical interpolation. SIAM J. Sci. Comput. 2010, 32, 2737–2764. [Google Scholar] [CrossRef]
- Dihlmann, M.; Drohmann, M.; Haasdonk, B. Model reduction of parametrized evolution problems using the reduced basis method with adaptive time partitioning. In Proceedings of the International Conference on Adaptive Modeling and Simulation, Paris, France, 6–8 June 2011; pp. 156–167. [Google Scholar]
- Berestycki, H.; Larrouturou, B.; Roquejoffre, J. Mathematical Investigation of the Cold Boundary Difficulty in Flame Propagation Theory. In Dynamical Issues in Combustion Theory; Fife, P., Liñán, A., Williams, F., Eds.; Springer: New York, NY, USA, 1991; pp. 37–61. [Google Scholar]
- Mandel, J.; Beezley, J.; Coen, J.; Kim, M. Data assimilation for wildland fires. IEEE Control Syst. 2009, 29, 47–65. [Google Scholar] [CrossRef] [Green Version]
- Fernández-Tarrazo, E.; Sánchez, A.L.; Liñán, A.; Williams, F.A. A simple one-step chemistry model for partially premixed hydrocarbon combustion. Combust. Flame 2006, 147, 32–38. [Google Scholar] [CrossRef] [Green Version]
- Landau, L.D.; Lifshitz, E.M. Fluid Mechanics, 2nd ed.; Pergamon Press: Oxford, UK, 1987. [Google Scholar] [CrossRef]
- Gilding, B.H.; Kersner, R. Travelling Waves in Nonlinear Diffusion-Convection Reaction; Springer: Cham, Switzerland, 2004. [Google Scholar] [CrossRef] [Green Version]
- Haasdonk, B. Reduced Basis Methods for Parametrized PDEs—A Tutorial Introduction for Stationary and Instationary Problems. In Model Reduction and Approximation; Benner, P., Cohen, A., Ohlberger, M., Willcox, K., Eds.; SIAM: Philadelphia, PA, USA, 2017; pp. 65–136. [Google Scholar] [CrossRef] [Green Version]
- Rowley, C.; Colonius, T.; Murray, R.M. Model reduction for compressible flows using POD and Galerkin projection. J. Phys. D 2004, 189, 115–129. [Google Scholar] [CrossRef]
- Holmes, P.; Lumley, J.L.; Berkooz, G.; Rowley, C.W. Turbulence, Coherent Structures, Dynamical Systems and Symmetry, 2nd ed.; Cambridge University Press: New York, NY, USA, 2012. [Google Scholar] [CrossRef]
- Gubisch, M.; Volkwein, S. Chapter 1: Proper Orthogonal Decomposition for Linear-Quadratic Optimal Control. In Model Reduction and Approximation; Benner, P., Cohen, A., Ohlberger, M., Willcox, K., Eds.; SIAM: Philadelphia, PA, USA, 2017; pp. 3–63. [Google Scholar] [CrossRef] [Green Version]
- Caiazzo, A.; Iliescu, T.; John, V.; Schyschlowa, S. A numerical investigation of velocity-pressure reduced order models for incompressible flows. J. Comput. Phys. 2014, 259, 598–616. [Google Scholar] [CrossRef]
- Himpe, C.; Grundel, S.; Benner, P. Model order reduction for gas and energy networks. arXiv 2020, arXiv:2011.12099v1. [Google Scholar]
- Kerns, K.J.; Yang, A.T. Preservation of passivity during RLC network reduction via split congruence transformations. IEEE Trans. Comput.-Aided Design Integr. Circuits Syst. 1998, 17, 582–591. [Google Scholar] [CrossRef]
- Li, R.C.; Bai, Z. Structure-preserving model reduction using a Krylov subspace projection formulation. Commun. Math. Sci. 2005, 3, 179–199. [Google Scholar]
- Ştefănescu, R.; Navon, I.M. POD/DEIM nonlinear model order reduction of an ADI implicit shallow water equations model. J. Comput. Phys. 2013, 237, 95–114. [Google Scholar] [CrossRef] [Green Version]
- Rewienski, M.; White, J. A trajectory piecewise-linear approach to model order reduction and fast simulation of nonlinear circuits and micromachined devices. IEEE Trans. Comput.-Aided Design Integr. Circuits Syst. 2003, 22, 155–170. [Google Scholar] [CrossRef] [Green Version]
- Astrid, P.; Weiland, S.; Willcox, K.; Backx, T. Missing point estimation in models described by proper orthogonal decomposition. IEEE Trans. Automat. Control 2008, 53, 2237–2251. [Google Scholar] [CrossRef] [Green Version]
- Gu, C. QLMOR: A projection-based nonlinear model order reduction approach using quadratic-linear representation of nonlinear systems. IEEE Trans. Comput. Aided Design Integr. Circuits Syst. 2011, 30, 1307–1320. [Google Scholar] [CrossRef]
- Carlberg, K.; Farhat, C.; Cortial, J.; Amsallem, D. The GNAT method for nonlinear model reduction: Effective implementation and application to computational fluid dynamics and turbulent flows. J. Comput. Phys. 2013, 242, 623–647. [Google Scholar] [CrossRef] [Green Version]
- Kramer, B.; Willcox, K.E. Nonlinear model order reduction via lifting transformations and proper orthogonal decomposition. AIAA J. 2019, 57, 2297–2307. [Google Scholar] [CrossRef]
- Drmač, Z.; Gugercin, S. A new selection operator for the discrete empirical interpolation method—Improved a priori error bound and extensions. SIAM J. Sci. Comput. 2016, 38, A631–A648. [Google Scholar] [CrossRef]
- Black, F.; Schulze, P.; Unger, B. Decomposition of flow data via gradient-based transport optimization. arXiv 2021, arXiv:2107.03481. [Google Scholar]
- Rim, D.; Peherstorfer, B.; Mandli, K.T. Manifold approximations via transported subspaces: Model reduction for transport-dominated problems. arXiv 2020, arXiv:1912.13024v2. [Google Scholar]
- Black, F.; Schulze, P.; Unger, B. Model order reduction with dynamically transformed modes for the wave equation. PAMM 2021, 20, e202000321. [Google Scholar] [CrossRef]
- Constantine, P.G. Active Subspaces; SIAM: Philadelphia, PA, USA, 2015. [Google Scholar] [CrossRef]
- Sarna, N.; Grundel, S. Hyper-reduction for parametrized transport dominated problems via online-adaptive reduced meshes. arXiv 2021, arXiv:2003.06362v3. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Symbol | Unit | Name | Symbol | Unit |
|---|---|---|---|---|---|
| temperature | T | supply mass fraction | S | ||
| thermal diffusivity | k | m s | temperature rise per second | K s | |
| proportionality coefficient | scaled heat transfer coefficient | K | |||
| pre-exponential factor | s | ambient temperature | |||
| wind speed | v | m s |
| Coefficient | k [ms] | v [m s] | [K s] | [K] | [K] | [s] |
|---|---|---|---|---|---|---|
| value | 0 | 300 |
| DOF | Relative Offline Error | Relative Online Error | Speedup | ||
|---|---|---|---|---|---|
| 1.90 × 10−3 | 4.28 × 10−4 | 6.18 × 10−3 | 1.41 × 10−3 | 103.11 | |
| 2.90 × 10−4 | 1.05 × 10−5 | 4.43 × 10−4 | 9.13 × 10−5 | 90.1 | |
| 2.27 × 10−4 | 9.22 × 10−6 | 2.43 × 10−4 | 4.92 × 10−5 | 53.499 | |
| 1.50 × 10−4 | 8.41 × 10−6 | 2.58 × 10−4 | 5.13 × 10−5 | 57.812 | |
| 5.13 × 10−5 | 7.93 × 10−6 | 1.90 × 10−4 | 4.40 × 10−5 | 47.563 | |
| 9.89 × 10−5 | 7.65 × 10−6 | 2.83 × 10−4 | 6.26 × 10−5 | 28.588 | |
| min | mean | max | |
|---|---|---|---|
| relative error | 1.25 × 10−3 | 9.11 × 10−3 | 1.96 × 10−2 |
| speedup | 18.63 | 32.97 | 51.64 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Black, F.; Schulze, P.; Unger, B. Efficient Wildland Fire Simulation via Nonlinear Model Order Reduction. Fluids 2021, 6, 280. https://doi.org/10.3390/fluids6080280
Black F, Schulze P, Unger B. Efficient Wildland Fire Simulation via Nonlinear Model Order Reduction. Fluids. 2021; 6(8):280. https://doi.org/10.3390/fluids6080280
Chicago/Turabian StyleBlack, Felix, Philipp Schulze, and Benjamin Unger. 2021. "Efficient Wildland Fire Simulation via Nonlinear Model Order Reduction" Fluids 6, no. 8: 280. https://doi.org/10.3390/fluids6080280
APA StyleBlack, F., Schulze, P., & Unger, B. (2021). Efficient Wildland Fire Simulation via Nonlinear Model Order Reduction. Fluids, 6(8), 280. https://doi.org/10.3390/fluids6080280