1. Introduction
For certain weather conditions, an interesting phenomenon can be observed when a water basin is covered by a thin ice film of 1–5 mm of thickness. The ice cover has elastic properties similar to that of polymer or a rubber—see, for example, the movie [
1]. Due to the unusual behaviour of such an ice cover, it is referred to as “rubber ice”. Under the influence of external forces, a wave motion can arise on the water surface covered by an ice film. Wave perturbations, in this case, are very similar to flexural-gravity waves (FGWs) in the oceans covered by floating ice-sheets [
2,
3,
4,
5] except some specifics caused by much less ice-film elasticity in comparison with the ice-plate rigidity and are referred to as hydro-elastic waves (HEWs). The softer properties of the rubber ice in comparison with the oceanic ice result in the possibility to excite HEWs on a water surface even by the relatively moderate wind similar to the generation of gravity-capillary waves. Wind-generated waves can be a subject of modulation instability in the result of which high-amplitude solitary waves can arise. This makes typical the study of conditions of modulation instability. In the case of surface waves without an ice cover, the comprehensive study of modulation instability of gravity-capillary waves was undertaken by several authors [
6,
7,
8]. In the recent paper [
9], this study was extended to include the influence of wind in the simplest model of uniform airflow with the tangential discontinuity of velocity at the air–water interface.
The modulation instability leads to the development of non-linear modulated wavetrains including envelope solitons. Weakly non-linear modulated waves in the ice-covered ocean were studied by Guyenne and Părău [
10] within the framework of the nonlinear Schrödinger (NLS) equation. Strongly non-linear solitary envelope waves (“bright” solitons) were studied by Il’ichev [
11,
12] within the framework of the primitive Euler equation. The general analysis of modulation instability of oceanic waves with ice compression and ice-plate inertia in the water of finite depth was carried out recently in Slunyaev and Stepanyants [
13].
The influence of wind on oceanic waves covered by a thick ice plate is, apparently, negligible but it is not the case when surface waves are considered in basins covered by a thin film of rubber ice. Such situations can be of particular importance for fresh-water basins such as lakes, rivers, artificial reservoirs, etc. Therefore, it is worth studying the modulation instability of HEWs in water basins covered by a film of rubber ice.
A wind profile over a flexible surface is usually non-uniform which makes it difficult to study waves in shear flows. However, it is feasible to construct a simpler wind model with a uniform vertical profile to evaluate the basic effects generated by airflow over the water surface as shown in
Figure 1. In hydrodynamics, a shear flow with tangential discontinuity of velocity plays an important role as the reference model which allows one to investigate the basic physical phenomena of wave-current interaction and acquire an insight into such a complex field (see, for example, [
14,
15]). This model is fascinating because of its simplicity as well as its far-reaching effects on the understanding of wave energy propagation. In particular, it can provide simple explanations about negative energy waves [
16], wave-induced currents [
17], over-reflection phenomenon [
18,
19], etc. Besides, when the wavelength of interfacial disturbances is considerably larger than the characteristic width of the shear flow profile, the model with tangential discontinuity of velocity can be sufficient for the description of physical phenomena within certain limits of spatial and temporal settings. The aforementioned model is well studied based on the linear approximation in [
15], whilst the modulation instability of weakly nonlinear wavetrains in the absence of ice film was studied recently by [
9]. It is of interest to find the criteria for the occurrence of modulation instability on a water surface in the presence of a thin film of rubber ice. In such cases, one can expect the generation of quasi-stationary nonlinear wavetrains along with envelope solitons which can have big amplitudes and form rogue waves [
20,
21].
The objective of this study is to investigate the existence of modulation instability on the air–water interface in the presence of rubber ice and provide a comprehensive analysis of conditions when the tangential discontinuity of velocity increases up to the onset of the Kelvin–Helmholtz-type instability. The subsequent sections of the manuscript are organised as follows: In
Section 2, the physical problem is formulated and the dispersion relation for surface waves in water covered by rubber ice under the influence of wind speed is analysed. In
Section 3, the criteria for modulation instability of HEWs are determined. Finally, the results are summarized in the conclusion followed by an appendix in which the NLS equation for the HEWs in the infinitely deep basin is derived.
2. The Problem Formulation
We consider a uniform airflow over infinitely deep water covered by an infinitely extended thin ice plate in a horizontal plane. The air and water are both considered to be incompressible and inviscid with the flow being irrotational. The mathematical model is considered in a two-dimensional Cartesian coordinate frame with the
x-axis being directed along the air–water interface covered by thin elastic ice film and the
z-axis being directed vertically upward as shown in
Figure 1. Moreover, it is assumed that
as the density of the air,
as the density of water,
as the density of ice film with
d being the thickness,
being the ice plate deflection from the horizontal mean position and
U being the air/wind speed. In such a model with the tangential discontinuity of the velocity profile, the vorticity is the Dirac delta-function being zero in each layer and infinite at the interface between the layers [
15].
Due to the assumptions that both the air and water are inviscid and their motion as irrotational, the velocity potentials
in each layer is introduced so that
, where
with index 1 being associated with the quantities in air, and index 2 being associated with the quantities in water. The governing equations in each layer satisfies the Laplace equation as given by
Further, it is assumed that all perturbations in the vertical direction far away from the interface disappear; in particular, for the wave velocities we have:
The kinematic boundary conditions at the interface yield:
and
Moreover, the dynamic boundary condition at the interface
is given by
where
is the ice-plate rigidity with
E being the Young’s modulus and
being the Poisson ratio. These quantities are not well determined for the rubber ice. Thus, we can speculate that they are qualitatively close to the known parameters for the Indian rubber of thickness
mm,
Pa,
, and
kg/
. These parametric values are used in the subsequent analysis unless otherwise mentioned.
Considering small-amplitude structural response and linearised theory of water waves, the response of the ice sheet is assumed to be of the form
where
k and
are the real-valued wavenumber and frequency, and
stands for the complex conjugate. The velocity potentials
and
satisfying the boundary conditions given in Equations (3) and (4) along with the far-field boundary conditions for
are related with the ice-sheet deflection
by the relations as given by
Substituting Equation (7) into the dynamic boundary condition as in Equation (5), the dispersion relation is obtained as
In particular, for
in Equation (8), yields the dispersion relation associated with the flexural gravity waves as given by
which is generated due to the interaction of surface gravity waves with a thin floating ice-sheet as in [
3,
4,
5].
The explicit form of the derivations of wave frequencies
in terms of the wavenumber
k are obtained by solving Equation (8) with regard to
(cf. [
15]) and is given by
where
is the stratification ratio,
and + and − sign correspond to
and
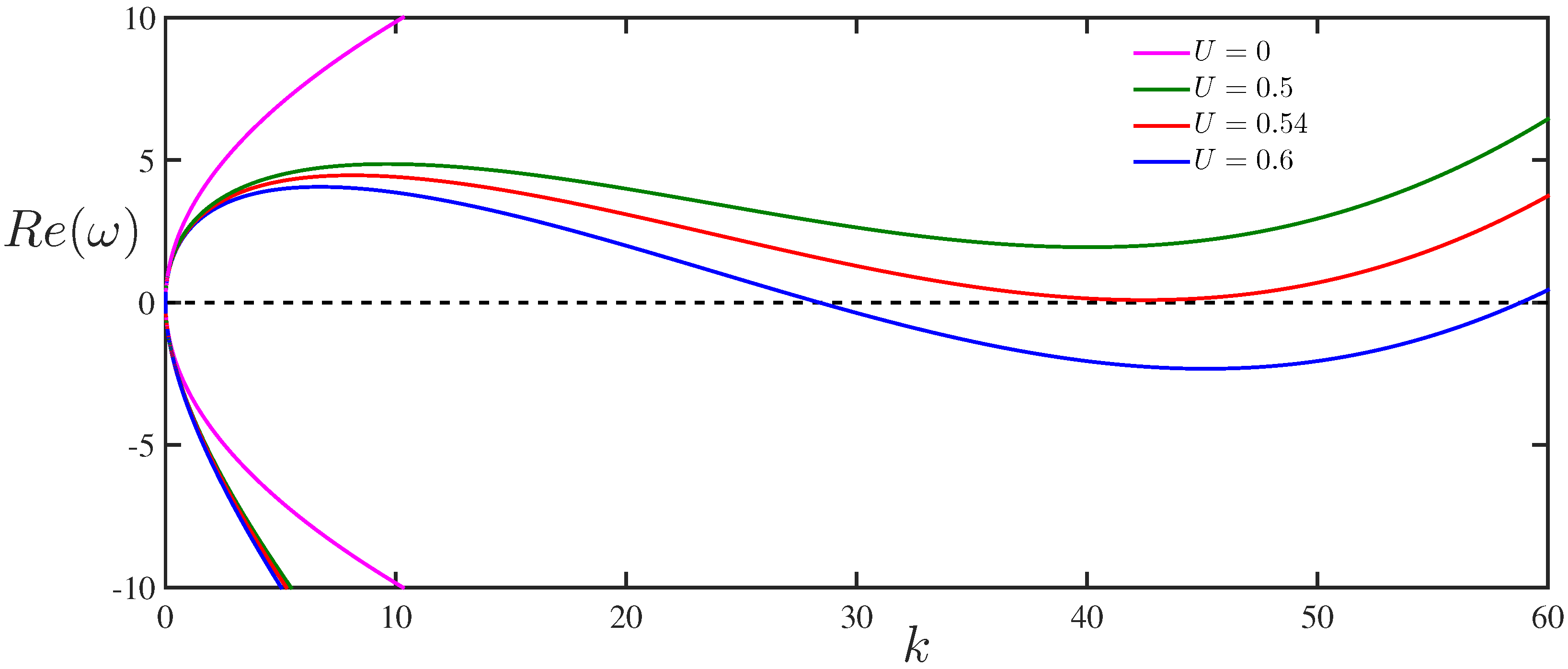
, respectively. The dispersion curves are exhibited in
Figure 2 for different values of wind velocity
U. For simplicity, the wavenumber
k is assumed to be positive, whilst the frequency
might be positive or negative. It may be noted that the wave frequency
is a positive quantity from a physical standpoint, however, the wavenumber
might have either sign.
As a special case for
, Equation (9) describes two symmetric branches of the dispersion curve with respect to the
k-axis, which correspond to the flexural-gravity waves propagating in opposite directions with phase speeds of
(see
Figure 2).
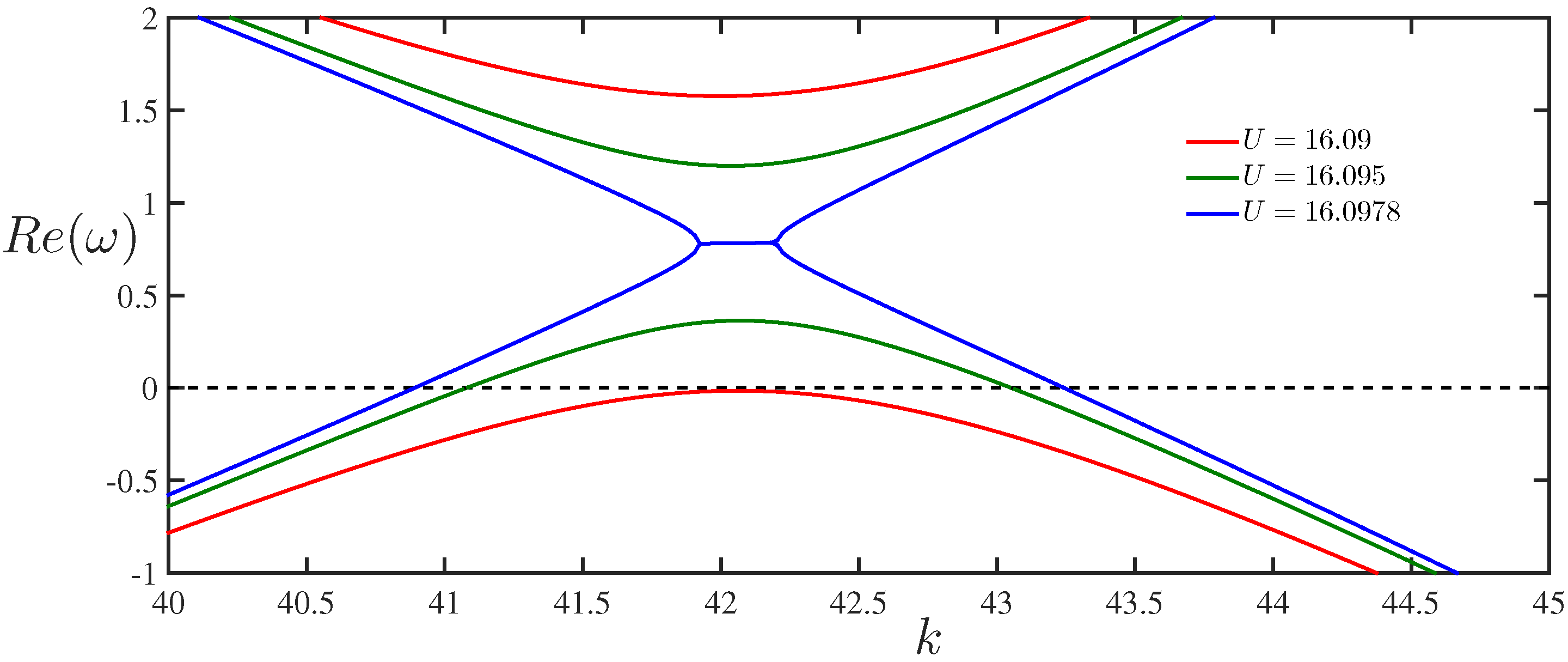
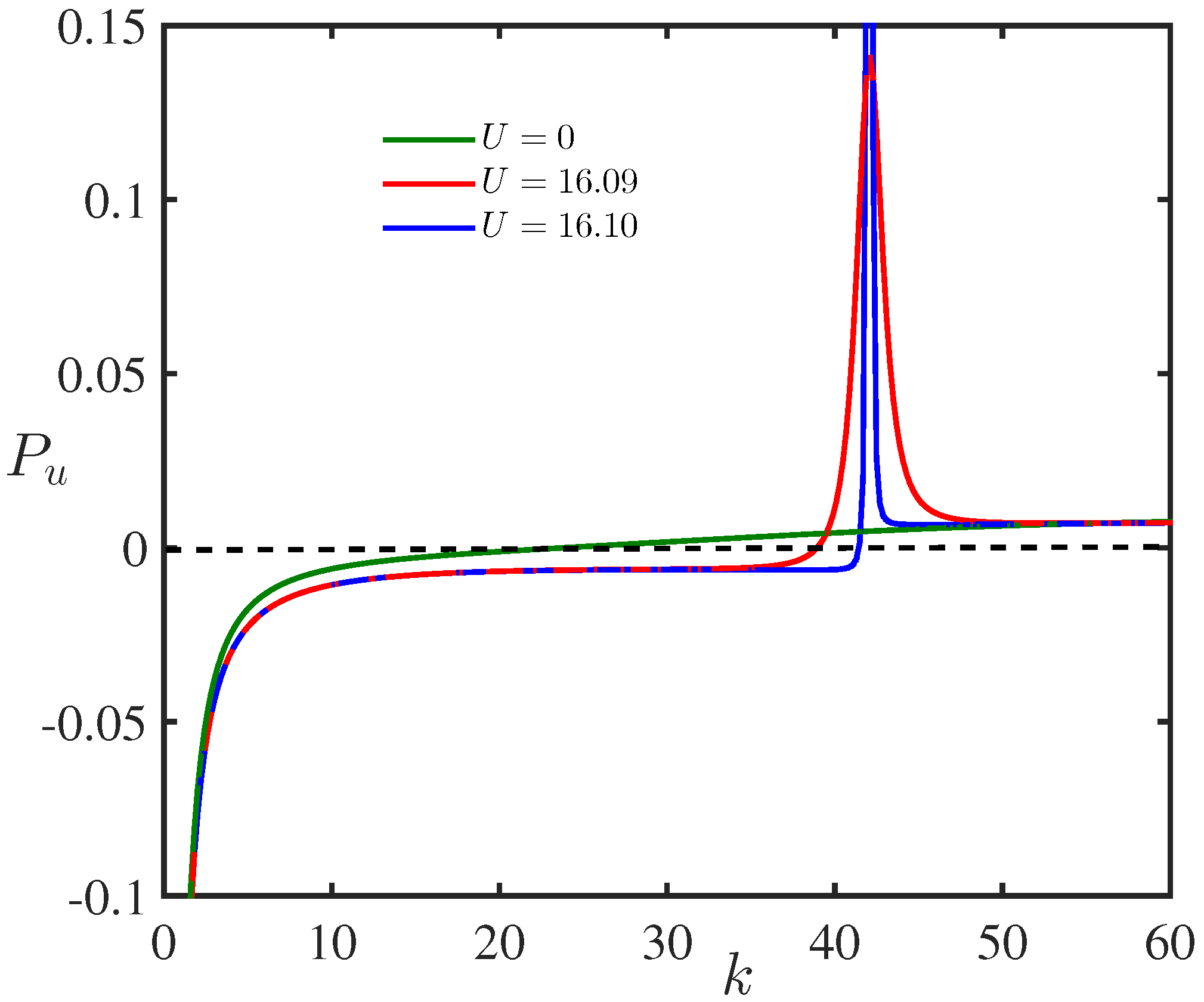
On the other hand, the dispersion curves become non-symmetric for
due to the wave drift induced by flow. Further, the lower branch of the dispersion curves changes it sign and become positive in the interval
for
m/s. This is illustrated in
Figure 3 for
m/s, which represents the magnified portion of
Figure 2.
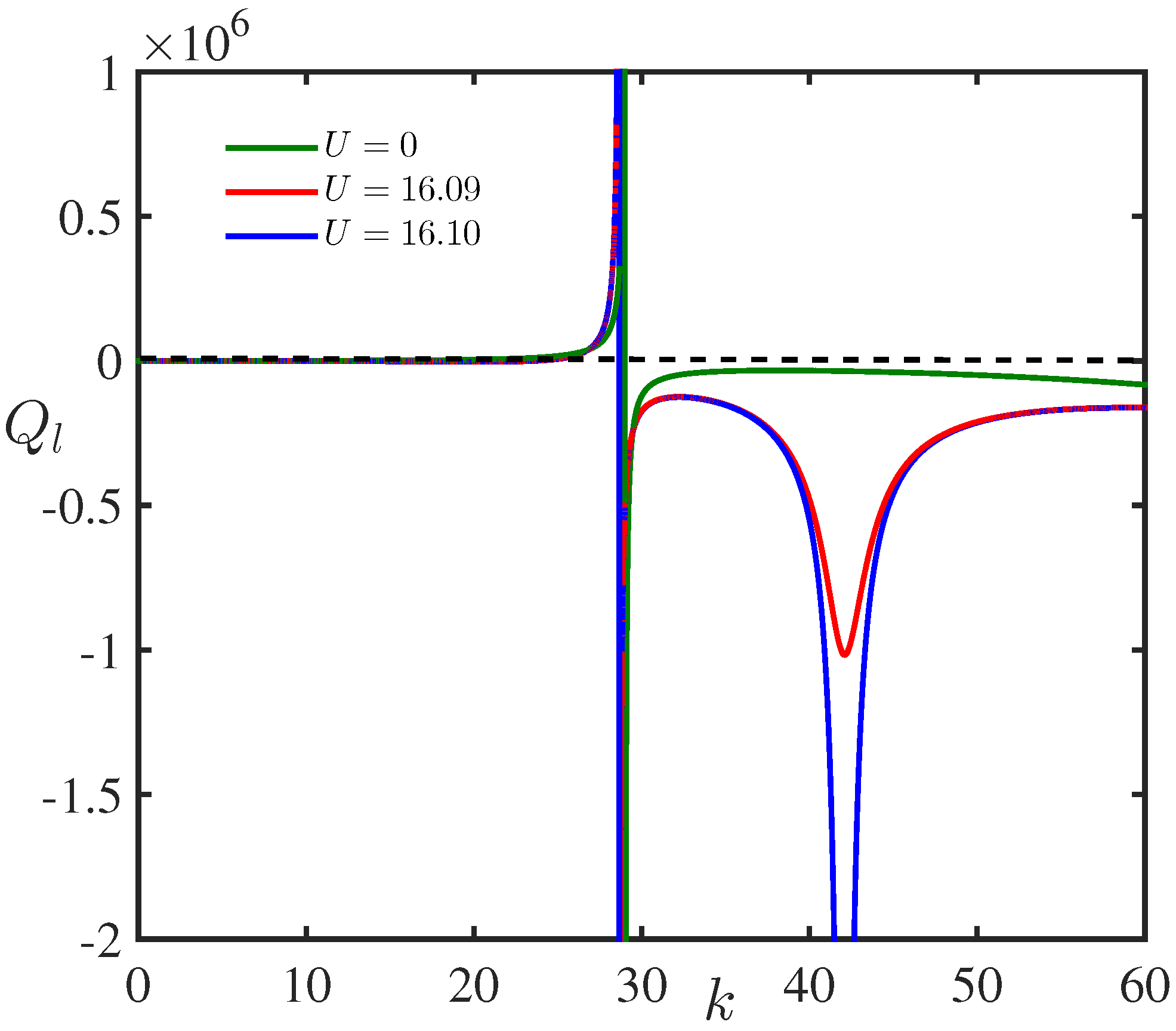
Besides, the values of
and
can be obtained from Equation (9) which are real roots of the fourth-degree polynomial in wavenumber
k as given by
Equation (10) can be rewritten in the non-dimensional form as given by
with
and
.
Figure 4 reveals that the function
has no real root for
, whilst it has two distinct positive real roots for
.
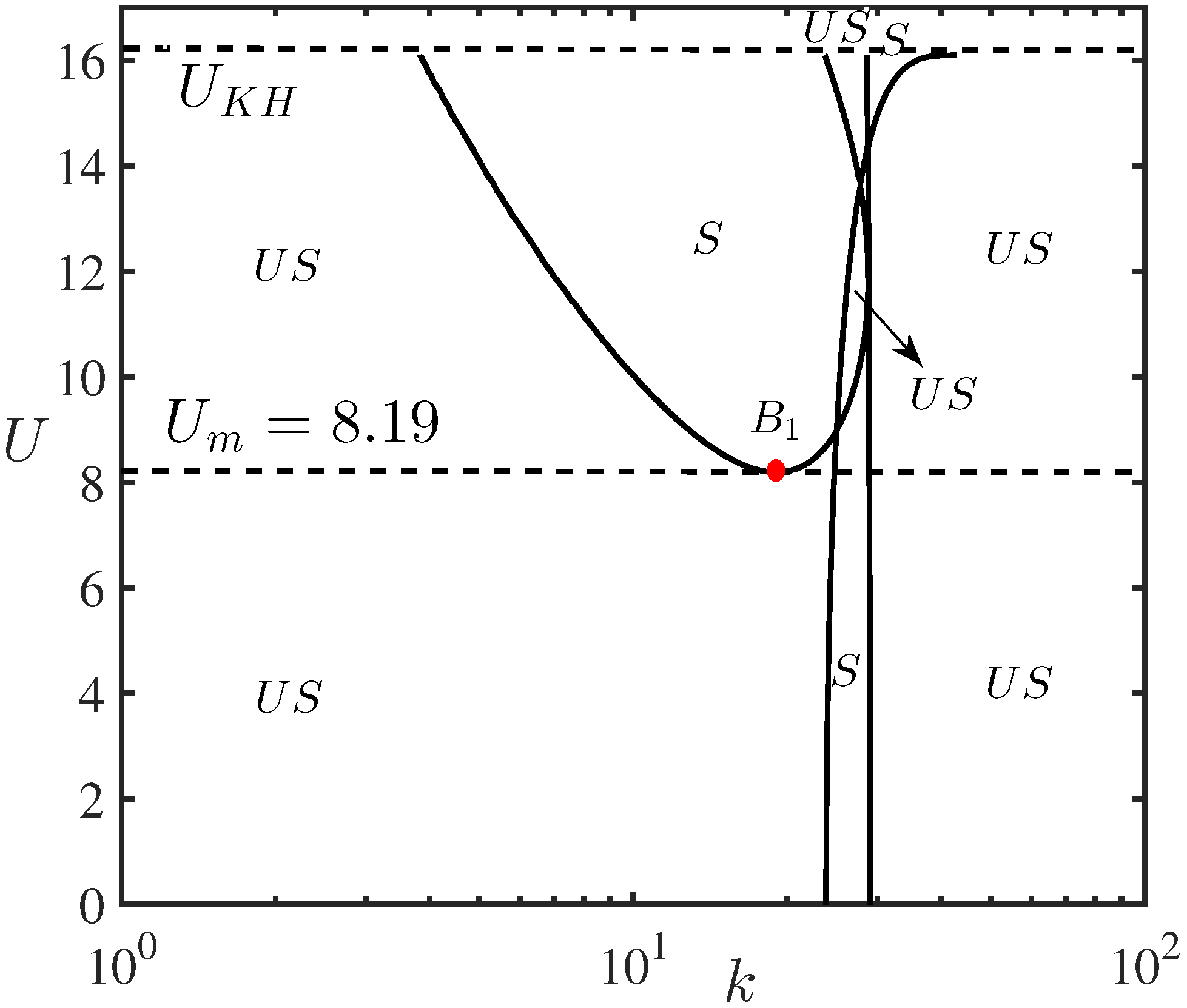
The critical wind speed
is obtained from Equation (9), where both phase and group velocities vanish and are given by
It is pertinent to mention that fragment of the dispersion curves for which the frequency changes its sign corresponds to the negative energy waves (NEWs) [
15].
Figure 5 illustrates the same dispersion curves as in
Figure 2 for
with
k being of either sign. In this representation, the negative frequency
is associated with the negative energy wave. However, the waves with the ’negative frequency’ and negative wavenumber
k are qualitatively similar and propagate in the same direction as for waves with positive frequency and positive wavenumber
k.
Figure 3 reveals that with an increase in the values of wind speed
U beyond
, the upper and lower branches of the dispersion curves continue to converge to each other and ultimately reconnect at
where
. It may be noted that the density ratio in the case of air–water interface is chosen as
to ensure
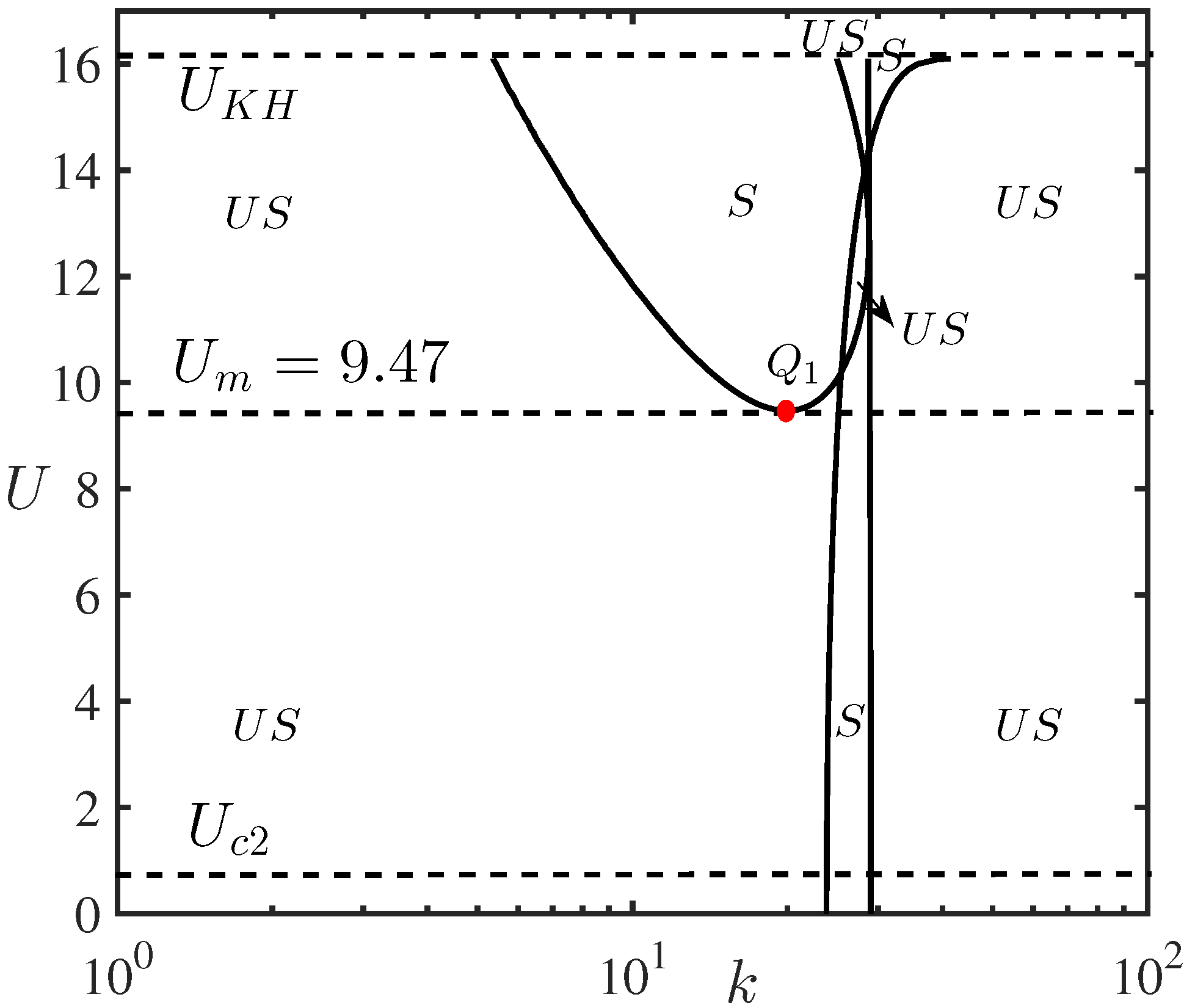
. Besides, the Kelvin–Helmholtz-type (K–H) instability occurs when the wind speed
U exceeds
. Moreover, the instability occurs in the interval
, where
and
can be derived from the following fifth-degree polynomial equation
This type of reconnection is significant for the interaction of waves with opposite energy signs which leads to the occurrence of K–H instability [
15,
16]. This phenomenon is attributed to the exchange of wave energy between the positive and negative energy waves associated with the upper and lower branches of the dispersion relation, respectively. Consequently, the amplitudes of both the waves synchronously grow in time.
Besides, in the interval
, no K–H instability occurs, whilst there exist non-growing but potentially unstable NEWs (see
Figure 3). Further, it may be noted that the wave amplitudes will grow for wavenumber
k lying in the range
provided their associated energy decreases. Moreover, from Equation (12) it is clear that the velocities
and
are closed to each other for smaller values of density ratio
a, which happens in the case of air–water interface for
. It is pertinent to mention that Benjamin [
22] was the first who discovered that for
,
, which is typical for internal layers in the oceans or the atmosphere.
Although the parameters for rubber ice are not well defined, it is of interest to demonstrate the influence of these parameters on the dispersion properties of HEWs. In the context of the present study, the value of Young’s modulus is chosen as
Pa, which is close to India rubber.
Figure 6 illustrates the dispersion curves of HEWs for three different values of Young’s modulus with airflow velocity
m/s.
Figure 6 reveals that the dispersion curve has no optima for
Pa, whereas the lower branch of the dispersion curve attains zero minima for
Pa and K–H instability occurs for
Pa. Thus, it is concluded that the critical wind speed varies with the change in the values of Young’s modulus
E which is also clear from Equation (12).
NEWs are neutrally stable in the absence of energy dissipation. However, they can grow in time only if there is a mechanism for taking out their energy. Potentially, there are different mechanisms responsible for the growth of NEWs. In particular, similar to the dissipative instability in plasma [
23], viscous dissipation in the immovable lower layer leads to the growth of NEWs [
24]. The dissipation of wave energy leading to the growth of NEWs and shear flow instability can be related to the radiation of internal waves from the pycnocline in the density stratified ocean [
25]. For amplification of NEWs, viscosity must lead to “positive losses”. For example, the NEWs in the model considered is damped if the upper moving layer is viscous rather than the lower layer. On the other hand, as the viscosity in the moving upper layer leads to “negative damping", the positive energy waves can grow on the upper branch of the dispersion curve. Undoubtedly, when the upper layer is at rest in the reference system, the energy associated with the growth as well as dissipative modes change signs simultaneously [
15]. In such a reference system, NEWs exist on the upper branch of the dispersion curve, which can grow under the influence of positive dissipation. Besides, the shear flow instability associated with this mode remains unchanged to the choice of the reference system.
It is interesting to note that by using simple transformation
in Equation (8), the dispersion relation associated with the stationary upper layer and oppositely moving lower layer can be obtained as
Proceeding in a similar manner as in the case of Equation (12), it can be easily concluded that NEWs arise for a very small velocity of the moving lower layer with current speed
where
It is noteworthy to mention that the critical velocities
and
as in Equations (12) and (15) are very close to each other in the case of
(e.g., for internal waves on the ocean pycnocline). However, it is significant for
where
is much greater than
with
m/s and
m/s as considered in the present study. A fragment of the dispersion curve associated with Equation (14) in the frame co-moving with the upper layer (i.e., static upper layer and moving lower layer) is exhibited in
Figure 7 for different values of
U including
m/s. In general,
Figure 7 reveals that the NEWs can exist on both branches of the dispersion curves for waves that are slowed down relative to the flow with phase velocities being lower than the velocities of the associated fluid layer.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}