Bidimensional Ray Tracing Model for the Underwater Noise Propagation Prediction




Abstract
1. Introduction
2. Materials and Methods
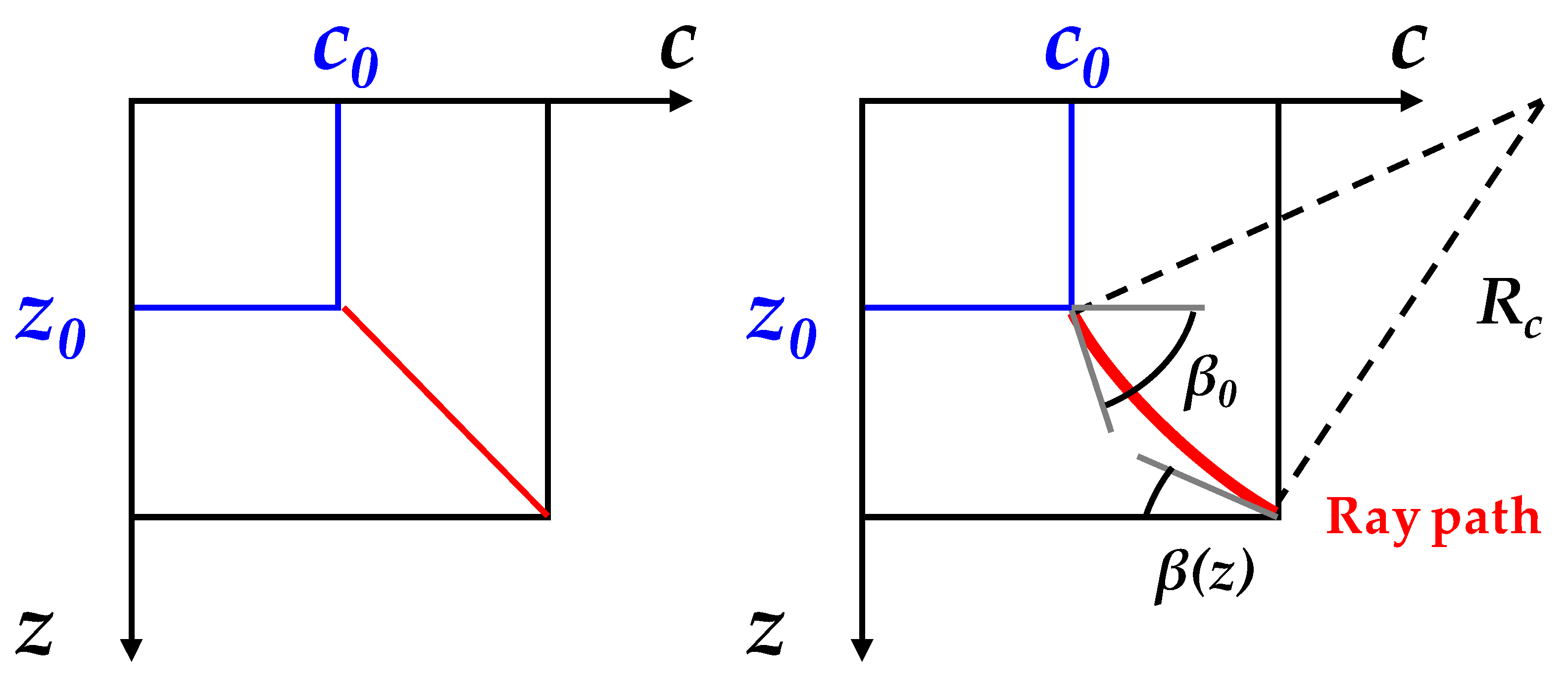
2.1. Theoretical Model of Ray Tracing
2.2. Numerical Prediction Code: Objectives and Functionality of the Program
2.2.1. Propagation Paths
- -
- If the angle of the i-th ray is greater than the critical angle, the latter will continue to propagate according to its direction until it reaches the bottom or the surface of the sea and then will reverse its direction.
- -
- If the angle of the i-th ray is greater than the critical angle, the latter will obviously reverse its direction of propagation before reaching the bottom.
2.2.2. Calculation of the Loss of Propagation (TL)
2.2.3. Calculation of the Sound Pressure Level (SPL)
2.3. Case Study Overview
- SOURCE:
- SEA AND CHARACTERISTICS:
- -
- A northern area characterized by a low percentage of salt due to the fact that the rivers flow into the basin. This area, which extends up to the cross of Ancona, is characterized by a shallow seabed.
- -
- A central area that goes from Ancona to the cross of the island of Pianosa, has a higher depth, and in particular, this area is characterized by warmer waters exhaled by the presence of the Ionian currents that penetrate through the Otranto Canal.
- -
- A southern area that extends along the coasts of Puglia where the maximum depth foreseen for this sea is reached, which is 1233 m in correspondence with the Gargano. This depression is also known as the “Fossa of the lower Adriatic”.
- MATRIX OF RECEIVERS:
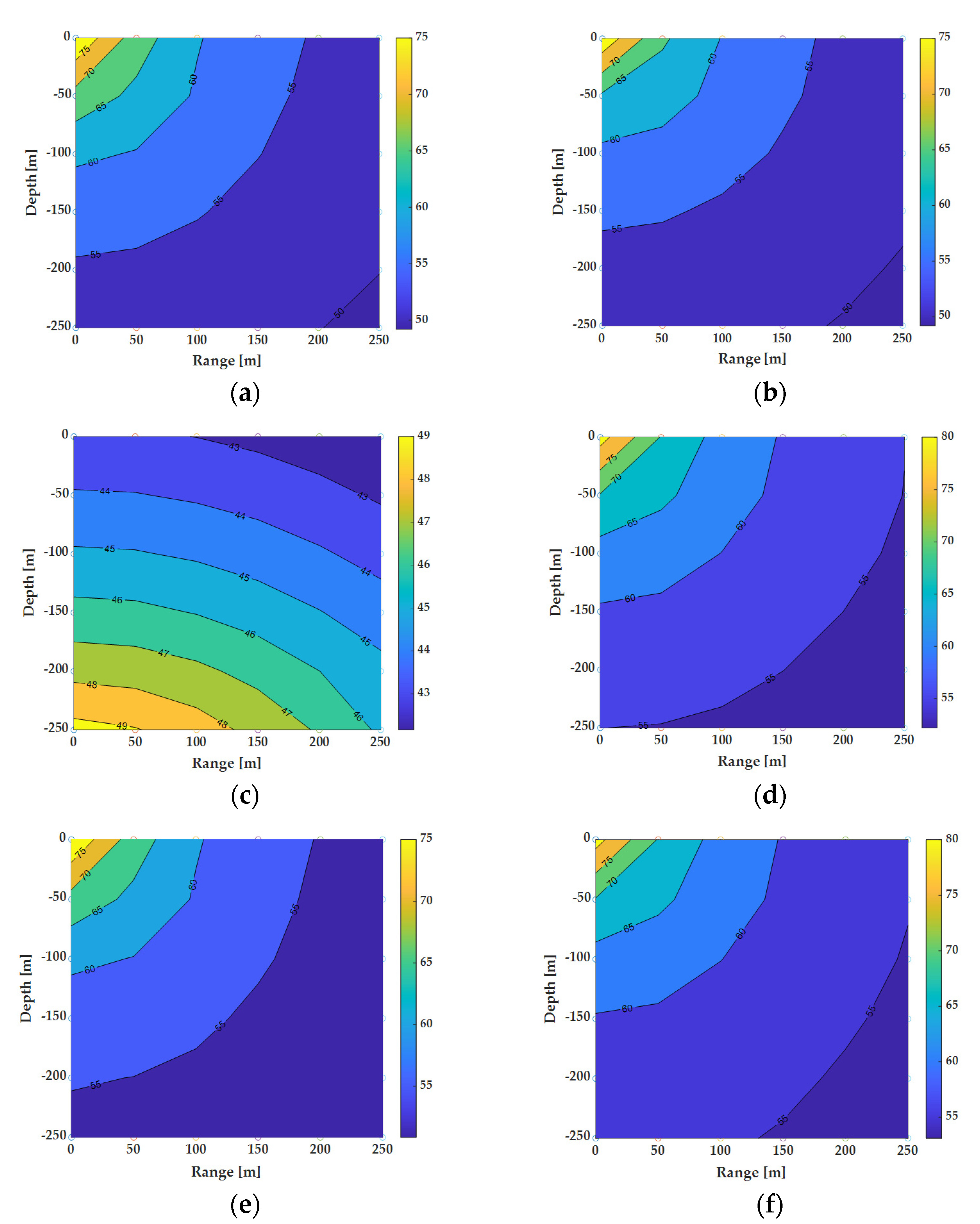
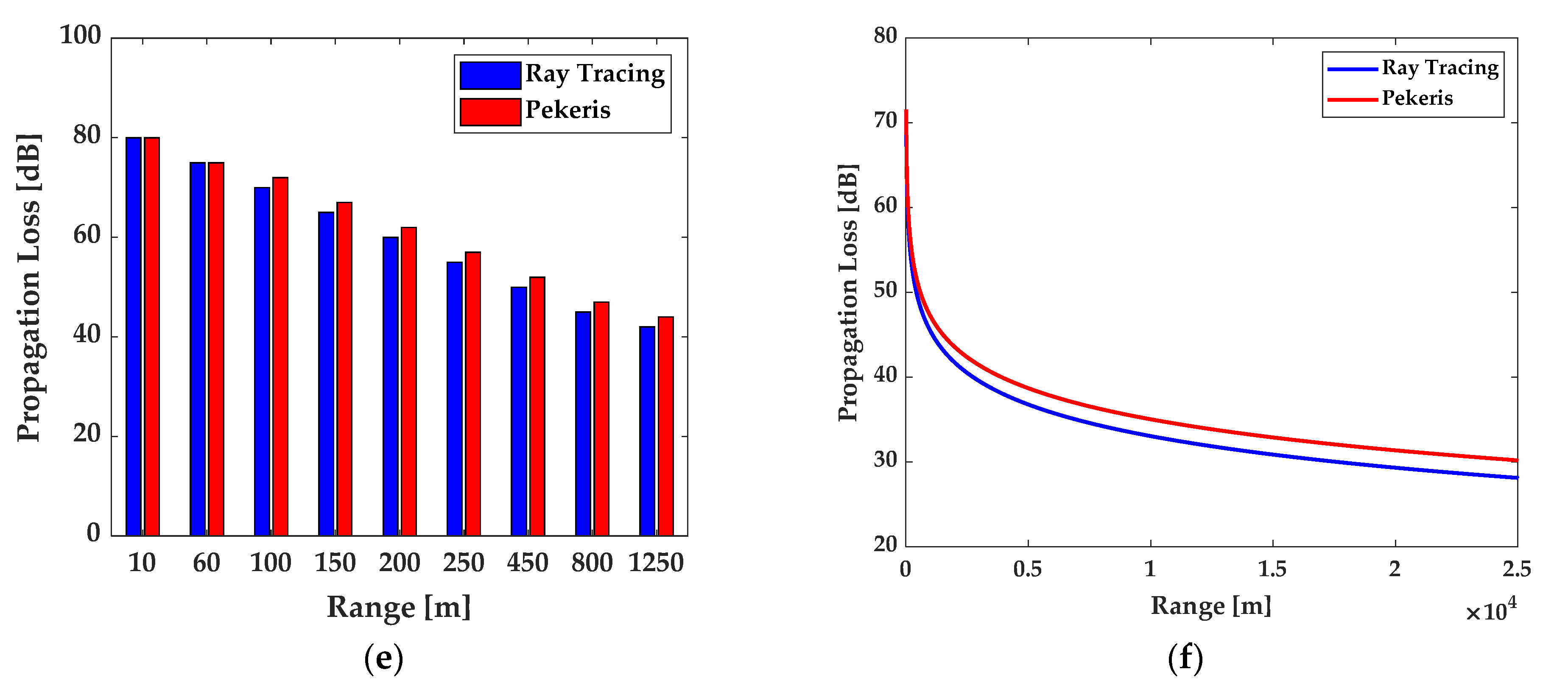
3. Results
4. Discussion
- HEIGHT OF THE SEABED
- STEP BETWEEN RADIATION ANGLES
5. Conclusions
- For the identification of the sound field radiated even at a great distance and, therefore, of the impact this may have on the marine environment.
- For the interpretation of the possible experimental values detected by the hydrophones in a field relatively close to the ship for an effective characterization of the disturbance source.
Author Contributions
Funding
Conflicts of Interest
Appendix A
- Factors taking into account the contribution of boric acid B(OH)3:
- Factors taking into account the contribution of magnesium sulfate Mg(SO)4:
- Factors that take into account the contribution of water viscosity:
Appendix B
- SPHERICAL DIFFUSION:
- CYLINDRICAL DIFFUSION:
References
- Knudsen, V.O.; Alford, R.S.; Emling, J.W. Underwater ambient noise. J. Mar. Res. 1948, 7, 410–429. [Google Scholar]
- Wenz, G.M. Acoustic ambient noise in the ocean: Spectra and sources. J. Acoust. Soc. Am. 1962, 34, 1936–1956. [Google Scholar] [CrossRef]
- Hildebrand, J.A. Anthropogenic and natural sources of ambient noise in the ocean. Mar. Ecol. Prog. Ser. 2009, 395, 5–20. [Google Scholar] [CrossRef]
- Committee on Potential Impacts of Ambient Noise in the Ocean on Marine Mammals. Ocean Noise and Marine Mammals; National Academies Press: Washington, DC, USA, 2003. [Google Scholar]
- Richardson, W.; Greene, C.; Malme, C.; Thomson, D. Marine Mammals and Noise; Academic Press: San Diego, CA, USA, 1995. [Google Scholar]
- Kozaczka, E.; Grelowska, G. Shipping low frequency noise and its propagation in shallow water. Acta Phys. Pol. A 2011, 119, 1009–1012. [Google Scholar] [CrossRef]
- Ross, D. Ship sources of ambient noise. IEEE J. Ocean. Eng. 2005, 30, 257–261. [Google Scholar] [CrossRef]
- Arveson, P.T.; Vendittis, D.T. Radiated noise characteristics of modern cargo ship. J. Acoust. Soc. Am. 2000, 107, 118–129. [Google Scholar] [CrossRef]
- Oceans and Law of the Sea (Division for Ocean Affairs and the Law of the Sea). United Nations Convention on the Law of the Sea. December 1982. Available online: www.un.org (accessed on 7 September 2020).
- Directive 2008/56/EC of the European Parliament and of the Council of 17 June 2008 Establishing a Framework for Community Action in the Field of Marine Environmental Policy (Marine Strategy Framework Directive). Available online: http://data.europa.eu/eli/dir/2008/56/oj (accessed on 7 September 2020).
- ISO 17208-2:2019. Underwater Acoustics—Quantities and Procedures for Description and Measurement of Underwater Sound from Ships. Available online: https://www.iso.org/standard/62409.html (accessed on 7 September 2020).
- International Towing Tank Conference (ITTC) Quality System Manual, Recommended Procedures and Guidelines, Underwater Noise from Ships, Full Scale Measurements. 2017. Available online: https://www.ittc.info/media/8183/75-04-04-01.pdf (accessed on 7 September 2020).
- International Maritime Organization (IMO). International Convention for the Prevention of Pollution from Ships (MARPOL); IMO: London, UK, 2 November 1973. [Google Scholar]
- Slabbekoorn, H.; Bouton, N.; van Opzeeland, I.; Coers, A.; ten Cate, C.; Popper, A.N. A noisy spring: The impact of globally rising underwater sound levels on fish. Trends Ecol. Evol. 2010, 25, 419–427. [Google Scholar] [CrossRef]
- Hawkins, A.; Pembroke, A.; Popper, A. Information gaps in understanding the effects of noise on fishes and invertebrates. Rev. Fish Biol. Fish. 2015, 25, 39–64. [Google Scholar] [CrossRef]
- Wright, A.J.; Highfill, L. Considerations of the effects of noise on marine mammals and other animals. Int. J. Comp. Psychol. 2007, 20, 89–316. [Google Scholar]
- Popper, A.; Hawkins, A.D. (Eds.) The Effects of Noise on Aquatic Life; Springer Science & Business Media: New York, NY, USA, 2012. [Google Scholar]
- Popper, A.; Hawkins, A.D. (Eds.) The Effects of Noise on Aquatic Life II. LLC; Springer Science + Business Media: New York, NY, USA, 2014. [Google Scholar]
- Popper, A.N.; Hastings, M.C. The effects of anthropogenic sources of sound on fishes. J. Fish Biol. 2009, 75, 455–489. [Google Scholar] [CrossRef]
- Erbe, C.; Marley, S.A.; Schoeman, R.P.; Smith, J.N.; Trigg, L.E.; Embling, C.B. The Effects of Ship Noise on Marine Mammals—A Review. Front. Mar. Sci. 2019, 6. [Google Scholar] [CrossRef]
- Southall, B.; Bowles, A.; Ellison, W.; Finneran, J.; Gentry, R.; Greene, C., Jr.; Kastak, D.; Ketten, D.; Miller, J.; Nachtigall, P. Marine mammal noise exposure criteria: Initial scientific recommendations. Aquat. Mamm. 2007, 33, 522. [Google Scholar]
- Rako-Gospić, N.; Picciulin, M. Underwater Noise: Sources and Effects on Marine Life. In World Seas: An Environmental Evaluation, 2nd ed.; Elsevier Academic Press: Amsterdam, The Netherlands, 2019; Volume III: Ecological Issues and Environmental Impacts, Chapter 20; pp. 367–389. [Google Scholar]
- McDonald, M.A.; Hildebrand, J.A.; Wiggins, S.M.; Ross, D. A 50 year comparison of ambient ocean noise near San Clemente Island: A bathymetrically complex coastal region off Southern California. J. Acoust. Soc. Am. 2008, 124, 1985–1992. [Google Scholar] [CrossRef] [PubMed]
- Wagstaff, R.A. Low-frequency ambient noise in the deep sound channel—The missing component. J. Acoust. Soc. Am. 1981, 69, 1009–1014. [Google Scholar] [CrossRef]
- Bannister, R.W. Deep sound channel noise from high latitude winds. J. Acoust. Soc. Am. 1986, 79, 41–48. [Google Scholar] [CrossRef]
- Andrew, R.; Howe, B.; Mercer, J.; Dziecuich, M. Ocean ambient sound: Comparing the 1960’s with the 1990’s for a receiver off the California coast. Acoust. Res. Lett. Online 2002, 3, 65–70. [Google Scholar] [CrossRef]
- McDonald, M.A.; Hildebrand, J.A.; Wiggins, S.M. Increases in deep-ocean ambient noise in the Northeast Pacific west of San Nicholas Island, California. J. Acoust. Soc. Am. 2006, 120, 711–718. [Google Scholar] [CrossRef]
- Carey, W.B.; Evans, R.B. Ocean Ambient Noise, Measurement and Theory; Springer: New York, NY, USA, 2011; p. 263. [Google Scholar]
- Kozaczka, E.; Grelowska, G. Shipping noise. Arch. Acoust. 2004, 29, 169–176. [Google Scholar]
- Kozaczka, E. Investigations of underwater disturbances generated by the ship propeller. Arch. Acoust. 1978, 13, 133–152. [Google Scholar]
- Ross, D. Mechanics of Underwater Noise; Pergamon: New York, NY, USA, 1976. [Google Scholar]
- Kozaczka, E.; Domagalski, J.; Grelowska, G.; Gloza, I. Identification of hydroacoustic waves emitted from floating units during mooring tests. Pol. Marit. Res. 2007, 14, 40–46. [Google Scholar] [CrossRef][Green Version]
- Kozaczka, E.; Grelowska, G.; Gloza, I. Sound Intensity in Ships Noise Measuring. In Proceedings of the 19th International Congress on Acoustics (ICA), 6 pp. CD, Madrid, Spain, 2–7 September 2007. [Google Scholar]
- Grelowska, G.; Kozaczka, E.; Kozaczka, S.; Szymczak, W. Some Aspects of Noise Generated by a Small Ship in the Shallow Sea. In Proceedings of the 11th European Conference on Underwater Acoustics, Edinburgh, UK, 2–6 July 2012. [Google Scholar]
- Urick, R.J. Principles of Underwater Sound; Mc Graw-Hill: New York, NY, USA, 1975; Chapter 10. [Google Scholar]
- Grelowska, G.; Kozaczka, E.; Kozaczka, S.; Szymczak, W. Underwater Noise Generated by a Small Ship in the Shallow Sea. Arch. Acoust. 2013, 38, 351–356. [Google Scholar] [CrossRef]
- McKenna, M.F.; Ross, D.; Wiggins, D.M. Underwater radiated noise from modern commercial ships. J. Acoust. Soc. Am. 2012, 131, 92–103. [Google Scholar] [CrossRef] [PubMed]
- Trevorrow, M.V.; Vasiliev, B.; Vagle, S. Directionality and maneuvering effects on a surface ship underwater acoustic signature. J. Acoust. Soc. Am. 2008, 124, 767–778. [Google Scholar] [CrossRef] [PubMed]
- Gloza, I. Experimental Investigation of Underwater Noise Produced by Ships by Means of Sound Intensity Method. Acta Phys. Pol. A 2010, 118, 58–61. [Google Scholar] [CrossRef]
- Zhang, G.; Forland, T.N.; Johnsen, E.; Pedersen, G.; Dong, H. Measurements of underwater noise radiated by commercial ships at a cabled ocean observatory. Mar. Pollut. Bull. 2020, 153, 110948. [Google Scholar] [CrossRef]
- Pekeris, C.L. Theory of Propagation of Explosive Sound in Shallow Water. Book Chapter. In Propagation of Sound in the Ocean; Geological Society of America Geological Society of America: Boulder, CO, USA, 1 January 1948. [Google Scholar] [CrossRef]
- Ceriola, G.; Viel, M.; Silvestri, C.; Campbell, G. MarCoast, Servizi di Qualità delle Acque da dati satellitari per mari europei. In Proceedings of the 13th National Conference ASITA (Italian Federation of Scientific Associations), Bari, Italy, 1–4 December 2009. [Google Scholar]
- The Adriatic forecasting system. Available online: http://oceanlab.cmcc.it/aifs/ (accessed on 7 September 2020).
- Meteorological and Hydrological Service. Available online: https://meteo.hr/index_en.php (accessed on 7 September 2020).
- Bas, A.A.; Affinito, F.; Martin, S.; Vollmer, A.; Gansen, C.; Morris, N.; Frontier, N.; Nikpaljevic, N.; Vujović, A. Bottlenose Dolphins and Striped dolphins: Species Distribution, Behavioural Patterns, Encounter Rates, Residency Patterns and Hotspots in Montenegro, South Adriatic (2016–2017); Annual Report, Montenegro Dolphin Project; DMAD: Antalya, Turkey, 2018. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SIMULATIONS | DEPTH | TIME REQUIRED |
|---|---|---|
| CASE I | 250 m | 9.86 min |
| CASE II | 500 m | 30.47 min |
| CASE III | 750 m | 55.30 min |
| CASE IV | 1000 m | 92.05 min |
| CASE V | 1250 m | 137.54 min |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
D’Andrea, E.; Arena, M.; Viscardi, M.; Coppola, T. Bidimensional Ray Tracing Model for the Underwater Noise Propagation Prediction. Fluids 2021, 6, 19. https://doi.org/10.3390/fluids6010019
D’Andrea E, Arena M, Viscardi M, Coppola T. Bidimensional Ray Tracing Model for the Underwater Noise Propagation Prediction. Fluids. 2021; 6(1):19. https://doi.org/10.3390/fluids6010019
Chicago/Turabian StyleD’Andrea, Emmanuele, Maurizio Arena, Massimo Viscardi, and Tommaso Coppola. 2021. "Bidimensional Ray Tracing Model for the Underwater Noise Propagation Prediction" Fluids 6, no. 1: 19. https://doi.org/10.3390/fluids6010019
APA StyleD’Andrea, E., Arena, M., Viscardi, M., & Coppola, T. (2021). Bidimensional Ray Tracing Model for the Underwater Noise Propagation Prediction. Fluids, 6(1), 19. https://doi.org/10.3390/fluids6010019