3.1. Unforced Flow with No Disturbances
When there is no forcing,
. Therefore, Equation (
4) is autonomous and it can be re-written in the form of a two-dimensional nonlinear dynamical system [
27,
61,
62,
73,
74,
75] with the following equilibria
in the weakly nonlinear phase plane,
. For
, the fixed point
is a centre and the fixed point
is a saddle, and the location of the two fixed points in the phase plane depends on whether
or
. If
, there is a saddle at the origin and a centre at
. If
, there is centre at the origin and a saddle at
. When
, the two fixed points,
, coalesce into a single degenerate node at the origin.
Multiplying Equation (
4) by
and integrating yields
where
C is a constant of integration. Equation (
4) can be used to plot the trajectories or orbits in the phase plane for different values of
C as is shown in the phase portraits of
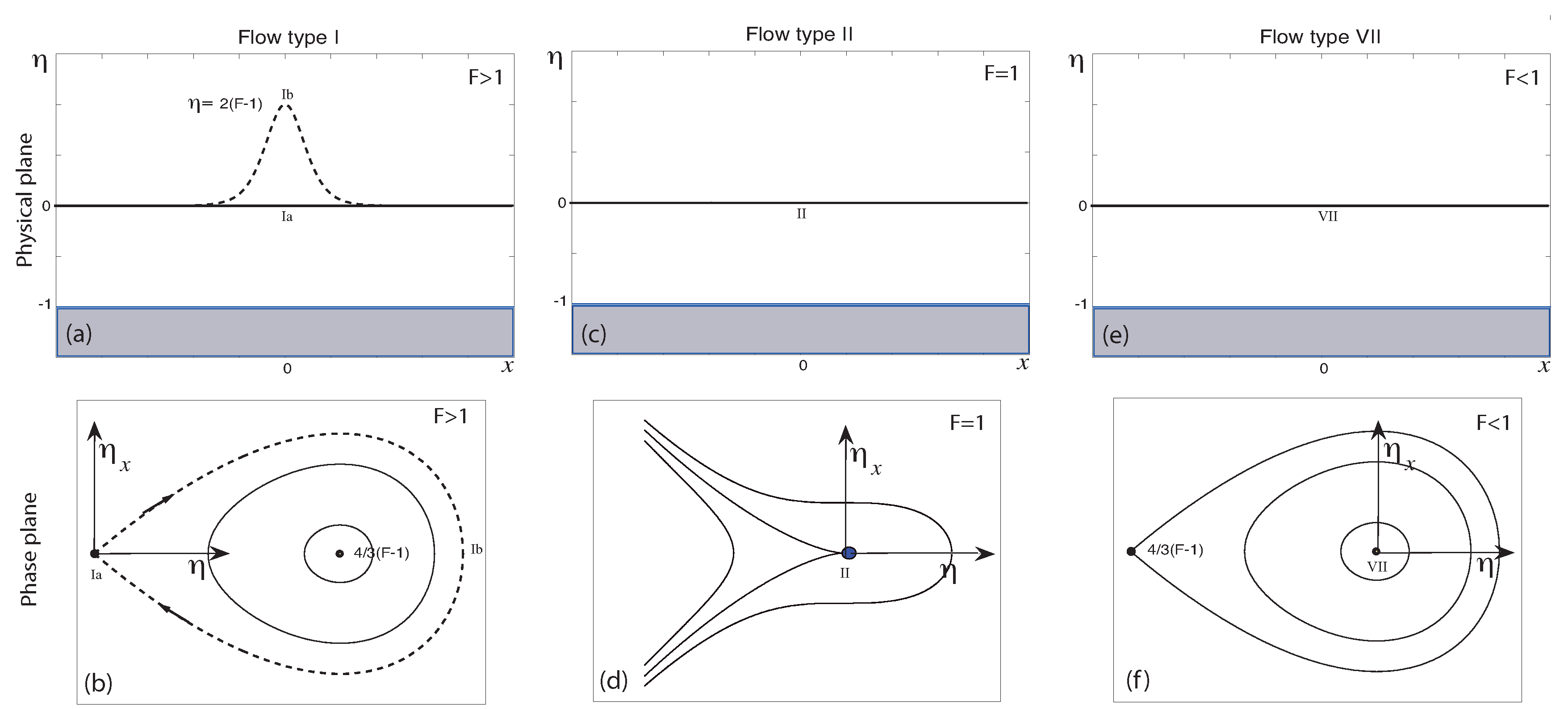
Figure 3.
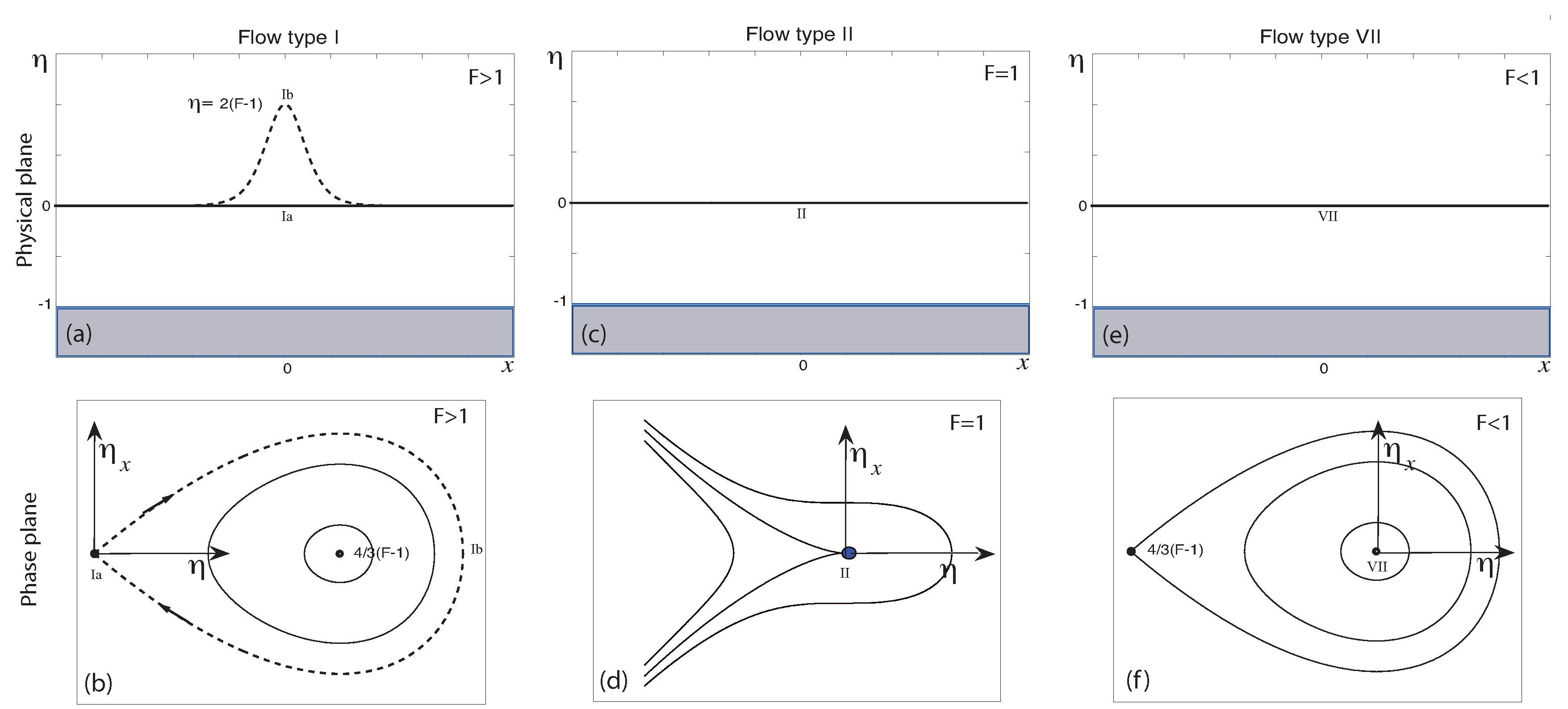
In the case of no forcing, there are three trivial solutions that correspond to uniform flow in the physical plane (solid lines), and in the phase plane these solutions are represented by the three fixed points located at the origin (see
Figure 3). However, for supercritical flow with
there is an additional nontrivial solution, the well-known unforced solitary wave
The unforced solitary wave is seen as the homoclinic orbit connecting the saddle at the origin to itself in the phase plane (broken curve for a value of
in
Figure 3b).
Equation (
8) (or Equation (
7) with
and
) give the maximum elevation of the unforced solitary wave,
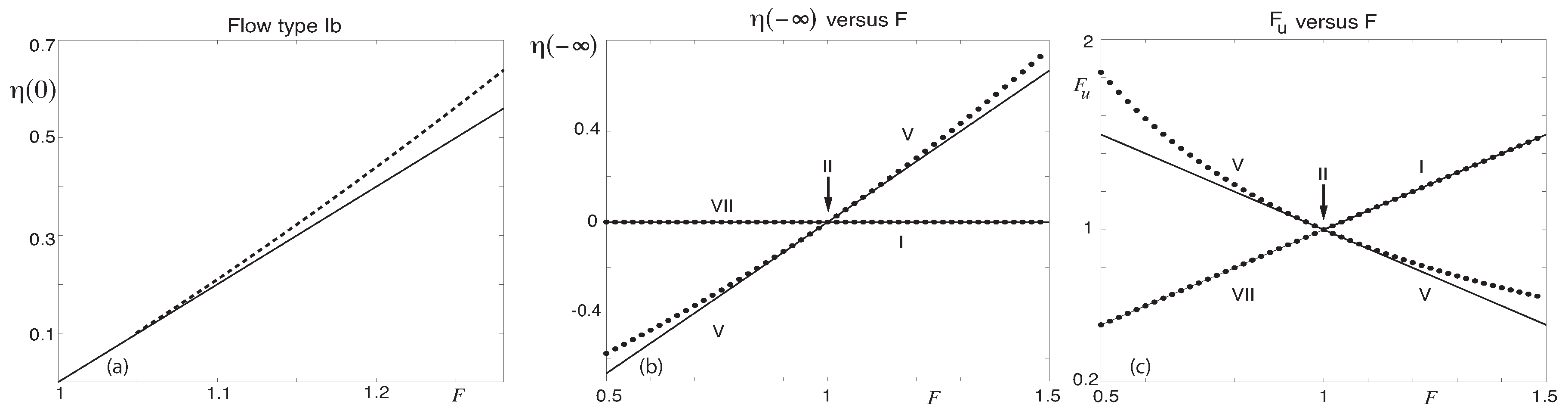
which can be compared to computed numerical values of the maximum elevation of the unforced solitary wave in the full problem. The comparison is presented in
Figure 4a where it is seen that there is good agreement between the weakly nonlinear and fully nonlinear results for values of the Froude number
, and this provides us with a quantitative measure for the range of validity of the weakly nonlinear analysis for flow type Ib.
It is important to note that the four types of unforced solution come from one parameter families for a given value of
F, which satisfy the uniform flow conditions Equation (
5) used in the derivation of Equation (
4). Furthermore,
all solutions, whether unforced or forced, must terminate at the origin in the phase plane in order to satisfy the boundary conditions Equation (
5). Therefore, and according to the weakly nonlinear phase plane analysis, there are no other unforced flow types as it impossible to construct solutions in the phase plane that connect (bounded) trajectories with the origin, other than that of the homoclinic orbit in the case of when
. As we shall see in the proceeding Sections, forced solutions provide a way to move between trajectories and fixed points in the phase plane, allowing for additional types of solutions.
Before we discuss the different types of forced solutions, it is useful to compare exact solutions of the full problem with corresponding values from the weakly nonlinear analysis for waveless uniform flow in the far-field, with
(and
), without reference to the specific details of the type of disturbance(s) in the channel. The only additional assumption we make at this stage is that the topography has the same horizontal level in the far-field, with
. Without loss of generality, it can be shown [
28] (and others) that exact solutions of the full problem must satisfy the relations
and
With the aforementioned conditions, and in terms of the weakly nonlinear theory, it is reasonable to assume that the uniform flow in the far-field may be approximated by the autonomous unforced KdV equation. It is now possible to consider (forced) solutions that not only begin and end their journey at the same fixed point in the phase plane (see
Figure 3b,d,f, with
and
), but also solutions that begin and end their journey at two different fixed points in the phase plane (see
Figure 3b,f, with
,
and
). All that remains is the derivation of a weakly nonlinear expression for the upstream Froude number in the case of when
and
. The derivation involves a transformation of the constant-level solution far upstream to the origin [
63], which is generalised here.
Consider the transformation
in Equation (
4) which yields
after dropping the carets. For the problem in hand,
and Equation (
12) reduces to
with the same conditions given by Equation (
5) now being satisfied when
. The upstream Froude number can now be expressed in terms of the downstream Froude number by simply examining the coefficient for
in Equation (
13), and we find that
in the weakly nonlinear framework. Note that Equation (
14) (and Equation (
11) in the the full problem) immediately rule out the possibility of solution types VI, VIII, X, XI when
.
The comparison between exact solutions of the full problem, Equations (
10) and (
11), and values of the weakly nonlinear analysis, Equations (
6) and (
14), is presented in
Figure 4b,c, and illustrate that only four of the eight basic flow types that are wave-free in the far-field are possible with the constraints considered so far. The results also show that there is good quantitative agreement between the two theories when
for flow type V. Furthermore, it is important to recognise that the analysis does not guarantee the existence of solutions for a given type of disturbance, or forcing and this needs to be established on a case-by-case basis. The first type of disturbance we consider is that of flow past a plate that separates two portions of the free surface.
3.2. Flow Past a Flat Plate
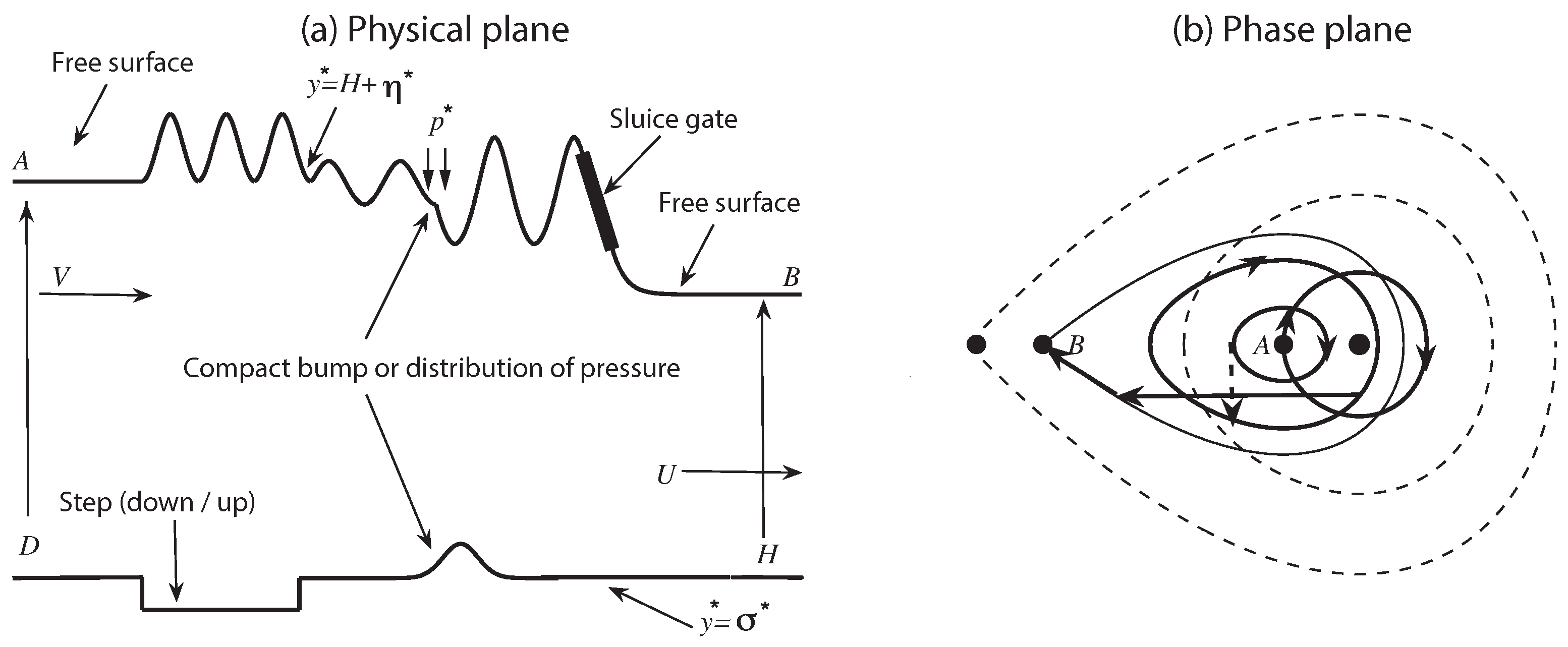
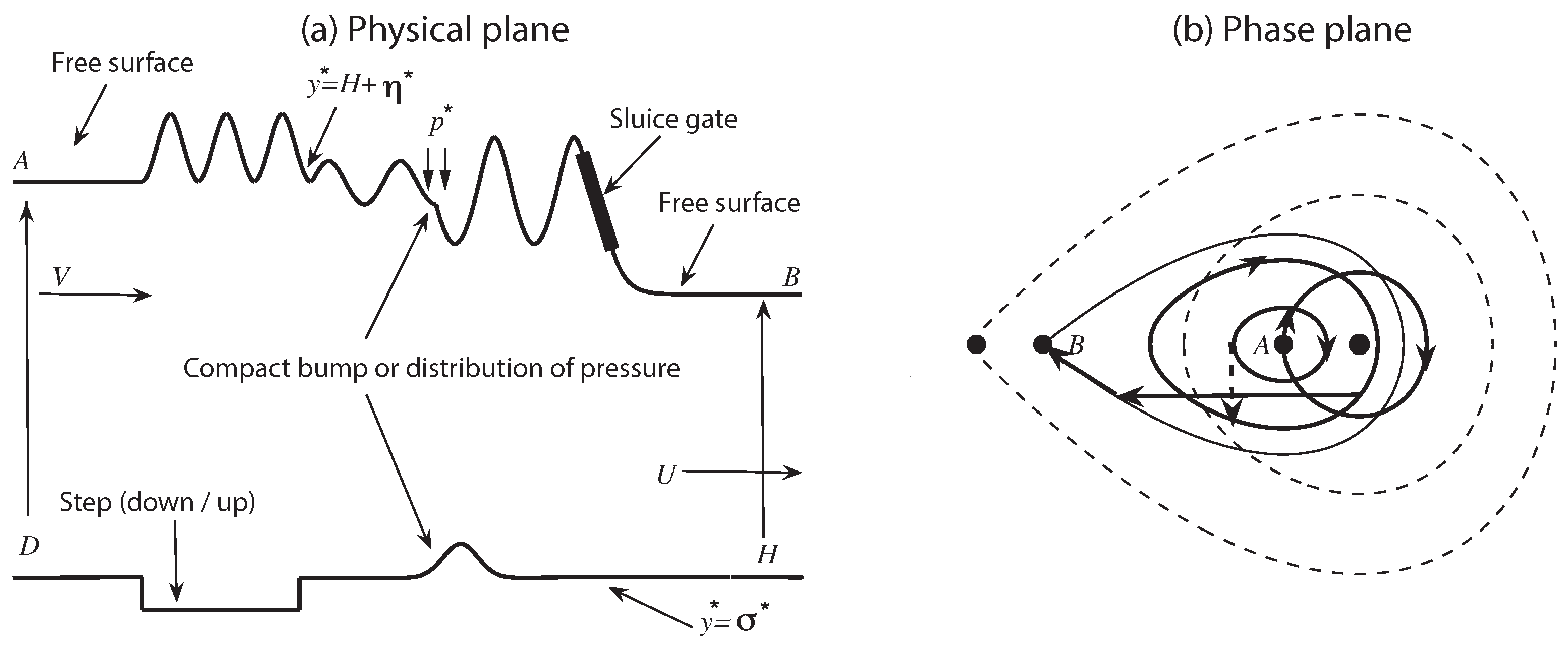
Having examined the unforced problem in the weakly nonlinear phase space, we now consider a flow that is perturbed by a flat plate inclined at an angle
to the horizontal line that separates two portions of the free surface as is illustrated in
Figure 5. Free-surface flow past a plate is a model approximation to flow past a sluice gate, or surfboard [
28,
37,
38,
39,
40,
41,
42,
43]. In terms of the weakly nonlinear analysis, solutions can be constructed by combining the trajectories associated with Equation (
7) (i.e.,
in Equation (
4)) on the free-surface with the known value of
on the plate. Equation (
15) gives a horizontal line, or jump in the phase plane
. The key idea amounts to using the unforced autonomous phase plane diagrams of
Figure 3 to model the two portions of the free surface that intersect with the constant slope of the plate, thus providing a way to examine and classify the existence of steady solutions of the potential flow model approximation for flow past a plate. In particular, we show that out of the possible four basic flow types I, II, V, VII that are wave-free in the far-field in the case when
, only the supercritical flow type I exists [
28].
For the supercritical flow type I, we now analyse the weakly nonlinear phase plane of
Figure 5b to determine the number of independent parameters in the corresponding weakly nonlinear profile
Figure 5a. For a given value of
, we can plot the phase plane shown in
Figure 5b. Then, a given value of
determines the horizontal line in the phase plane
Figure 5b. In the case of flow type I, we have already seen that a solution trajectory in the phase plane must begin and end its journey at the saddle point in order to satisfy the constraints
as
, with
. Therefore, we start to move from the saddle point at the origin, in a clockwise direction on the solitary wave orbit,
, past the maximum elevation
,
. At the intersection of the upstream portion of the free-surface with plate, there is a horizontal jump, given by Equation (
15), to the intersection of the downstream portion of the free-surface with the plate, before returning to the saddle point via the solitary wave orbit. The analysis in the phase plane suggests that there is a two parameter family of solutions for given values of
and
, which has been confirmed in both the weakly nonlinear (see
Figure 5a) and the full problem [
28,
41], with the length of the plate,
L, coming as a part of the solution.
The intersections of the plate with the upstream and downstream free surfaces can be determined as follows. Using Equations (
15) and (
7), with
, we obtain a cubic for
and define the three roots as
. The first and second roots,
and
, are then the elevation of the plate at the intersection with upstream and downstream portions of free surface, respectively. We note that the third root,
, is of no interest to us as it corresponds to the intersection of the horizontal line with the unbounded trajectory emanating from the origin into the third quadrant of the phase plane,
and
, leading to an unbounded solution (see, for example, the unbounded trajectories in the phase planes for supercritical flow in
Figure 6). The length of the plate,
must then come as part of the solution, to ensure that the phase trajectory leaves and rejoins the solitary wave orbit in the phase plane
Figure 5b. Notice that when
, we obtain the maximum value of
from Equation (
16) with
, and recover the unforced solitary wave solution. Therefore, the solution can be classified as a perturbation of a solitary wave. Consistent with our previous analysis for the unforced solitary wave as shown in
Figure 4a, there is good quantitative agreement between the weakly nonlinear and the fully nonlinear results for
[
28,
41]. In contrast, if we consider the case when
, then
,
,
, and we obtain a solution for supercritical past a semi-infinite flat horizontal plate [
28] (and others).
The only other solution for flow past a flat plate of finite length with
that satisfies the boundary conditions Equation (
5) is the basic generalised hydraulic fall flow type IV [
28], with
and a train of waves on the free surface as
. The number of independent parameters is three, and they can be determined by examining the phase plane diagram of
Figure 5d. Similar to our previous analysis for flow type I, given values of
and
determine the general features of the phase portrait and the horizontal line in the phase plane. The additional, third independent parameter can now be chosen as the length of the plate,
, and this determines the amplitude of the waves on the upstream free surface in
Figure 5c, which are seen as the inner periodic orbits in
Figure 5d. It is worth mentioning that for given values of
F and
there are two types of solution, corresponding to two different values of
L, with waves on the upstream free-surface that have the same amplitude. One of these solutions is shown in
Figure 5c,d where the elevation of the plate at the intersection of the upstream free surface is to the right of the centre,
. The second solution corresponds to a point of intersection to the left of the centre,
. The precise values for the elevation of the intersections of the plate with the free-surface,
and
, and the length of the plate,
L, can be obtained in a similar way to that for flow type I, but with a non-zero value of
C in Equation (
7). Importantly, the analysis shows that there are no solutions with zero wave amplitude, corresponding to a hydraulic flow type V, as it is impossible to jump from the centre
onto the horizontal line
in the phase plane. This analysis also holds for any flow type with
and
, where there is simply no way to achieve a horizontal jump off a trajectory into the centre and degenerate node, now both at
, in the phase plane (see unforced phase portraits of
Figure 3f,d), and therefore the boundary conditions Equation (
5) cannot be satisfied for flow past a flat plate with
and
[
28].
To summarize, the phase plane analysis has shown that out of the 11 basic flow types, only the steady solutions I and IV exist for a flat plate. Furthermore, flow type IV does not satisfy radiation condition when the flow is from left-to-right because the waves appearing on the upstream free surface are not generated by the plate. As stated in the Introduction, this situation can be remedied by reversing the direction of the flow, which is permissible for potential flows [
7,
22,
30,
50,
57]. However, this reversed flow type IV no longer represents an approximation to flow past a sluice gate as the water in a channel does not flow up-hill, and instead it may be interpreted as a flow with a train of waves downstream from a hydrofoil (moving left-to-right, with the streamwise direction being right-to-left relative to the foil). Interestingly, and for
any given solution, the reversibility of the flow direction can also be seen in the phase plane by simply reflecting the emboldened trajectories (and jumps, e.g., see
Figure 5b,d) about the
axis, with the arrows still pointing in the anti-clockwise direction.
As we shall now examine, the number of basic flow types that exist can be increased by considering a different type of disturbance in the channel, for example, a compact bump in the bottom of the channel, or compact distribution of pressure on the free surface.
3.3. Flow Past a Compact Bump in the Topography or Compact Distribution of Pressure on the Free Surface
Flow past a compact bump in the topography, or a compact distribution of pressure on the free surface has been investigated in many previous studies [
8,
9,
20,
25,
26,
27,
44,
45,
46,
49,
62,
65,
66,
67,
68] (and others). As was discussed in the Methods section, in terms of the weakly nonlinear theory the same fKdV Equation (
4) can be derived for either a topographical disturbance,
, or distribution of pressure on the free surface,
. Of course, this does not necessarily hold true in the full problem, for solutions not within the range of validity of the weakly nonlinear analysis, and the disparity between the weakly nonlinear and fully nonlinear models for these two different types of disturbances is discussed towards the end of this Section. Nonetheless, as we are primarily concerned with the weakly nonlinear problem, we begin the analysis by restricting our attention to flow past a compact bump in the topography on the understanding that the analysis is also applicable to flow past a compact distribution of pressure on the free surface, when within range of the weakly nonlinear analysis.
Although Equation (
4) is now non-autonomous because
, the following analysis effectively reduces the problem to that of the autonomous problem with a vertical jump representing the compact forcing in the phase plane [
27,
58]. To see this, we consider the Gaussian forcing given by
where
A and
B are both constants, and it can be shown [
22] that
the Dirac delta function multiplied by the amplitude of forcing,
A. Assuming that the forcing is given by Equation (
20), Equation (
4) can be replaced with the autonomous equation
and the vertical jump condition
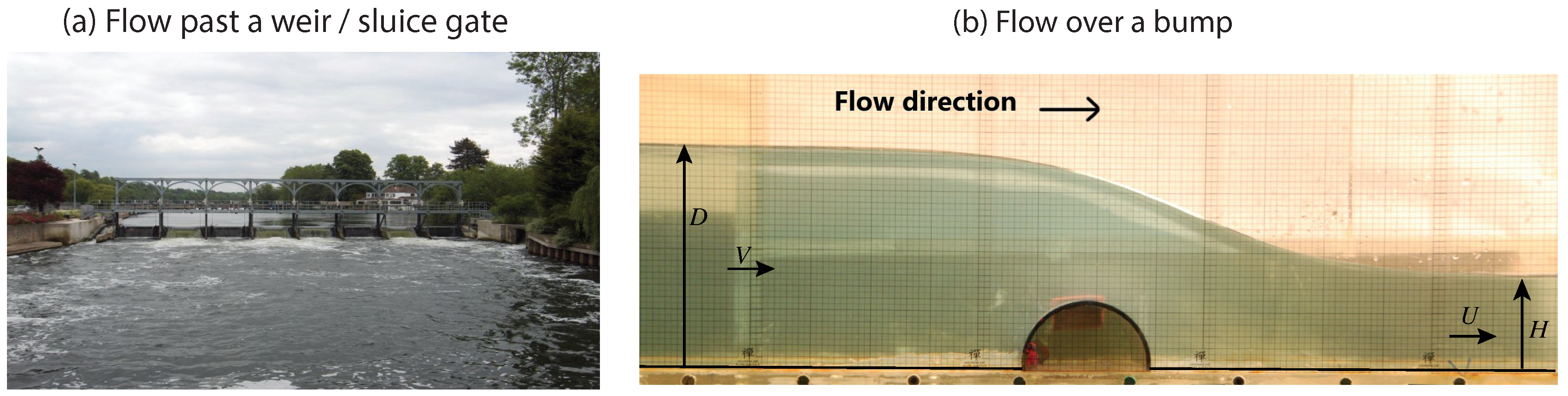
Dias and Vanden-Broeck [
27] showed that the forcing given in Equation (
20) is a good approximation for other types of compact shaped bumps in the topography, such as a semi-circle (see
Figure 1), triangle [
58] and Gaussian bump with a finite value of
B (see
Figure 6). The amplitude of forcing,
A, is therefore a measure of the size, or area of the bump.
Analysis in the phase plane can determine the number of independent parameters for a solution to a particular flow configuration, where there is either a vertical upward (
) or downwards (
) jump between the trajectories and fixed points in the phase plane, corresponding to the location of the forcing in the physical plane (i.e., at
for the forcing given in Equation (
20)). It is noticed that with the vertical jump condition it is now possible to jump into and away from fixed points in the phase plane, and this was simply not possible with a flat plate and horizontal jump in the phase plane.
For compact forcing, there is then a much richer solution space than that of flow past a flat plate, but the analysis at the end of
Section 3.1, which was independent of the specific type of disturbance, still holds because
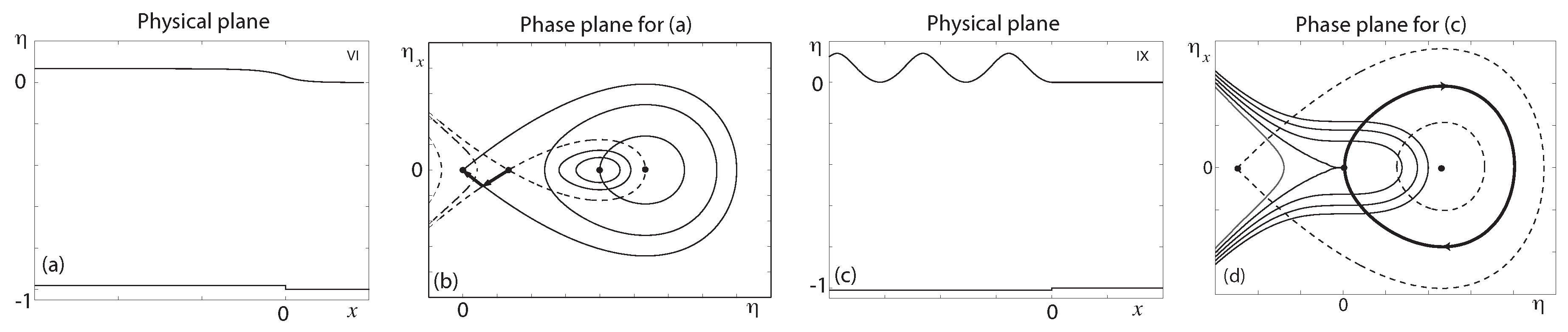
, and therefore the basic wave-free flow types VI, VIII, X, XI do not exist. Analysis in the phase plane also determines the non-existence of flow types VII and IX. For example, flow type IX with
and a train of waves as
is not possible as there are no periodic orbits (i.e., periodic waves) in the phase plane when
(see
Figure 3d and
Figure 6). Therefore, only the first five basic flow types I–V exist for compact forcing and the qualitatively different types of solution are shown in
Figure 6.
When examining the phase space for flow type I with
, we see that it is possible to have more than one solution for given values of
F and
A (see the relevant panels of
Figure 6). In the case when
, the two sub-types of solution can be further classified with the help of the weakly nonlinear theory by examining the limiting behaviour as
. This corresponds to the vertical jumps vanishing in the phase plane, and the solution with the jump to the left of the centre approaches a uniform stream (flow type Ia, see
Figure 3a,b), whereas the solution with the jump to the right of the centre approaches the unforced solitary wave solution (flow type Ib, see
Figure 3a,b). Therefore, the two solutions can be classified as a perturbation of a uniform stream and a perturbation of a solitary wave, respectively. A similar analysis holds in the case when
, where the three sub-types of solution can be classified as a perturbation of a uniform stream (flow type Ia), a perturbation of two solitary waves (flow type Ic), and a perturbation of a single solitary wave (flow type Ib).
In both cases, when either
or
, and for a given value of
, a sub-type solution bifurcation occurs when
and this corresponds to a solution with a vertical jump, passing through the centre in the phase plane, between the maximum and minimum values in
for the homoclinic trajectory [
24,
27,
34,
61,
65]. Equation (
23) is derived using Equation (
7), with
for the homoclinic orbit, and the jump condition Equation (
22); it can be seen as the upper solid curve (for
) and the lower broken curve (for
) in
Figure 6. Moreover, in the case when
, Equation (
23) defines the maximum value of
A for a given value of
. However, it is important to recognise that such a restriction on the magnitude of the forcing does not exist in the case when
, as the perturbation of a uniform solution (flow type Ia) exists for all values of
, and this sub-type of solution is qualitatively similar to the only solution for the basic flow type II with
and
.
We now turn our attention to solutions for flow type III with
and waves as
. Note that the direction of the flow has been reversed in the relevant panels of
Figure 6, so that the waves appear downstream of the location of the forcing, in order to satisfy the radiation condition. For a given value of
, solutions are characterised by a vertical jump between the origin and a periodic orbit in the phase plane, and as the amplitude of forcing
the flow approaches a subcritical uniform stream as is shown in
Figure 3e,f. In contrast, when the magnitude of the amplitude of forcing increases the period and amplitude of the waves increases, and ultimately the period of the waves approaches infinity for the maximum magnitude of the amplitude of forcing,
and in this case there is hydraulic fall flow type V, which is illustrated with a vertical jump between the centre and homoclinic trajectory in the phase plane. The values of Equation (
24) can be seen as the two lower solid curves in
Figure 6 for given values of
.
Both generalised hydraulic and hydraulic falls, flow types IV and V, are possible when
, and it can be shown that the solution branches for the waveless hydraulic fall flow type V are also given by Equation (
24), illustrated with the two upper broken curves in
Figure 6.
The solid curves given by Equation (
24) for
, Equation (
23) for
and
, and
for
define two regions in the parameter space where no steady solutions exist, and solutions within this intrinsically unsteady range are often referred to as transcritical flows [
24,
27,
34,
61,
65]. Typically, the unsteady solutions of the time-dependent fKdV Equation (
3) are characterised by solitons that are periodically generated upstream of the forcing, with a wake that propagates downstream (e.g., see the waterfall plots in
Figure 6) [
31,
34,
36,
65,
77,
78,
79,
80].
The range of validity of the weakly nonlinear analysis can be established by examining solutions that are wave-free in the far field, i.e., flow types II and V. The results shown in
Figure 4b,c, which are directly applicable to the compact forced problem for the hydraulic fall flow type V, illustrate the comparison between exact solutions of the full problem with values of the weakly nonlinear analysis for the constant-level height of the free-surface far upstream and the upstream Froude number,
. We see that there is good agreement between the two theories when
. An additional comparison between the weakly nonlinear theory and numerical solutions to solve the full problem with experimental values of the amplitude of forcing is also found in the work of Tam et al. [
19].
In the case of flow type II, we expect the difference between the weakly and nonlinear theories to be greater for the sub-type of solutions corresponding to the perturbed solitary waves (flow types IIb and IIc) than that for the sub-type solutions corresponding to the perturbed uniform stream (flow type IIa). Therefore, the results for the unforced solitary wave (flow type IIb) in
Figure 4a provide a good starting point for comparison between the weakly nonlinear and fully nonlinear theories, where it is shown that there is good quantitative agreement when
. In the absence of any forcing, it is well-known that the highest unforced solitary wave approaches a Stokes limiting configuration of a sharp crest with a 120° included angle and stagnation point. Numerical solutions of the full problem require a concentrated clustering of mesh points to compute the rapidly increasing change in the slope of the free-surface near the wave crest [
49,
69,
81,
82,
83], with a corresponding value of the Froude number
for the highest unforced wave. Interestingly, the highest unforced wave is not the fastest wave, nor does it contain the most energy, and highly nonlinear phenomena have been observed as the wave approaches the Stokes limiting configuration [
49,
69,
81,
82,
83]. More recently, this highly nonlinear behaviour has been found in the full problem when solutions approach the Stokes limiting configuration with localised forcing due to either a topographic disturbance, or a distribution of pressure on the free-surface [
49,
69]. Consistent with our results for the unforced wave, Wade et al. [
49,
69] showed that there is good quantitative agreement between the weakly and fully nonlinear models for the locally forced solitary waves type IIb and IIc when
, and the qualitative agreement between the two theories is excellent for values of
. However, there are differences in the qualitative behaviour of the full problem for the two types of forcing in flow regimes when the Froude number is close to the highest unforced value of Froude number in Equation (
25). In particular, Wade et al. [
69] found no highest wave flow type IIb solutions for localised topological forcing with
; the two wave crests within the cusp above the location of forcing merge into a single wave crest. In the case of pressure forcing, the qualitative nature of the weakly nonlinear analysis is preserved with the two wave crests within the cusp both approaching a Stokes limiting configuration. This disparity between the flow due to pressure forcing on the free surface and that of topographical forcing can be attributed to the diminishing effect that increasing the size of the dip in the channel topography has on the free surface [
49,
69]. This leaves open the question of whether solution sub-type IIb, with
, for the Stokes limiting configuration exists in the topographically forced flow.
In summary, only the first five basic flow types I–V exist for compact forcing, with good quantitative agreement between the weakly and nonlinear theories for flow types I and V when
and
, respectively. Weakly nonlinear solutions within these two ranges may either be interpreted as flow past a compact bump in the topography, or a compact distribution of pressure on the free-surface. However, the qualitative predictions of the weakly nonlinear theory for the perturbed solitary wave solutions, flow type Ib and Ic with
, become invalid when
F is close to the value given in Equation (
25), and the highly nonlinear behaviour for both types of forcing can only be investigated with analysis of the full problem.
In the next section, we consider our third type of disturbance, when there is a sudden, or rapid transition between two constant horizontal levels in the channel bottom topography.
3.4. Flow over a Step (Up or Down)
The problem of flow past a step (e.g., located at
) in the channel bottom topography is fundamentally different to the problems of flow past a finite plate and compact forcing, because the height of the channel bottom is no longer the same far upstream and far downstream [
51,
52,
53,
54,
55,
56]. For the problem of flow past a step of height
h, we now have that
and
, instead of
(see
Figure 7). In terms of the weakly nonlinear theory, there are no vertical or horizontal jumps in the phase plane and solutions are obtained by moving continuously along the orbits from one phase plane, representing the flow upstream of the step, with
and
, to a second phase plane, representing the flow downstream of the step, with
and
[
54]. The latter of these two phase planes corresponds to the autonomous KdV Equation (
4), with
. The equilibria are given by Equation (
6) and the trajectories in the phase plane can be plotted using Equation (
7). The former of the two phase planes, when
and
, is then given by
with equilbria
and the trajectories in this phase plane can be plotted using
for different values of the constant of integration,
C [
54]. The fixed point
is a centre and the fixed point
is a saddle, but they do not exist for all values of
F when
. Their existence requires a positive discriminant in Equation (
27), which defines the maximum height of the step
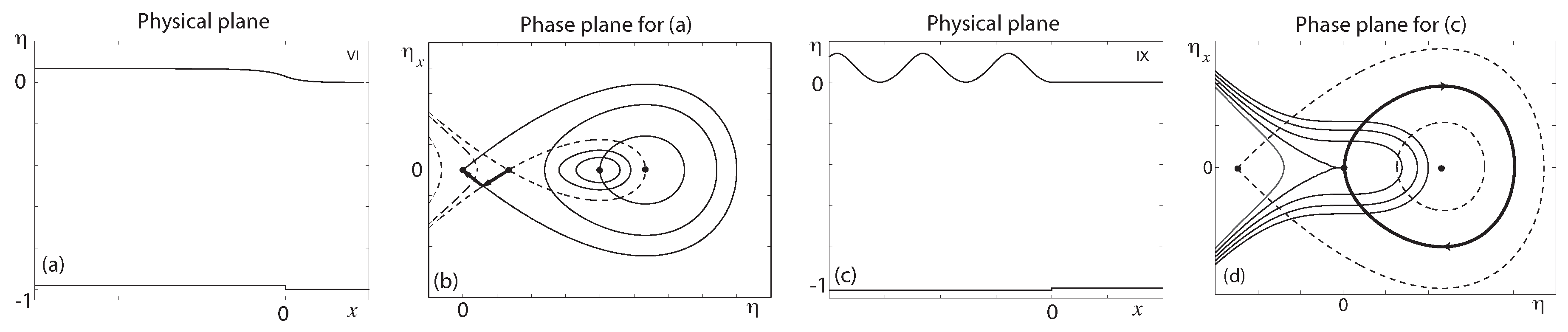
Solutions for flow types VI and IX are presented in
Figure 7, and it is apparent that these two flow types were not possible with the two previous types of forcing (plate and bump) considered in this work. Examining solutions in the phase plane allows us to determine the flow type. For example, the solution shown in
Figure 7b is for a waveless flow, with
and
, which begins and ends its journey at the two saddle points in the phase plane. We need to determine the value of the upstream Froude number,
, that corresponds to the constant-level of the free-surface far upstream (i.e., the saddle point,
, given by Equation (
27)), and this can be derived in a similar way to that of Equation (
14) by using the transformation
and Equation (
26) to obtain
which is a new approximation for the upstream Froude number, when
. Note that Equations (
27), (
28) and (
30) reduce to Equations (
6), (
7) and (
14) when
, or
. Continuing with our example, we have
(with
,
and
) for the waveless flow type VI shown in
Figure 7a. If we consider the limit as
, then
, and therefore this supercritical solution can be further classified as a perturbation of a uniform stream. It is worth mentioning that the analysis in the phase plane shows that the perturbation of a solitary wave sub-type solution does not exist in the case of a step in the channel bottom topography.
For flow over a step, Binder et al. [
54] used the weakly nonlinear theory to determine the existence of the basic flow types III, IV, V, VI and IX. However, in this paper, we shall focus on solutions that are wave-free in the far-field and compare values from the weakly nonlinear analysis with exact values found in the full problem.
Exact solutions of the full problem for flow over a step that are wave-free in far-field must satisfy the relations [
54]
and
with the maximum height of the step in the full problem being given by [
51]
Note that Equations (
31) and (
32) relax to those of Equations (
10) and (
11) when
. The comparison between weakly nonlinear, Equations (
27) and (
30), and fully nonlinear, Equations (
31) and (
32), results for
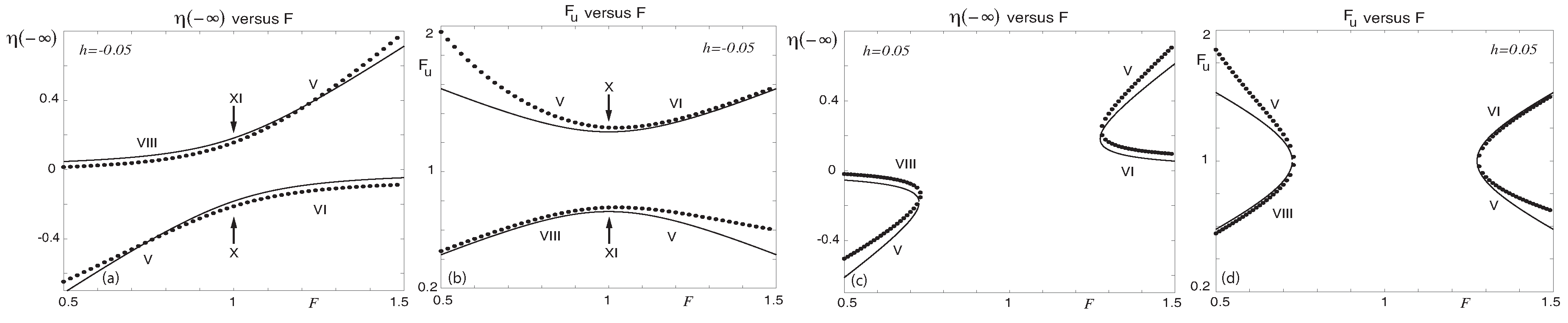
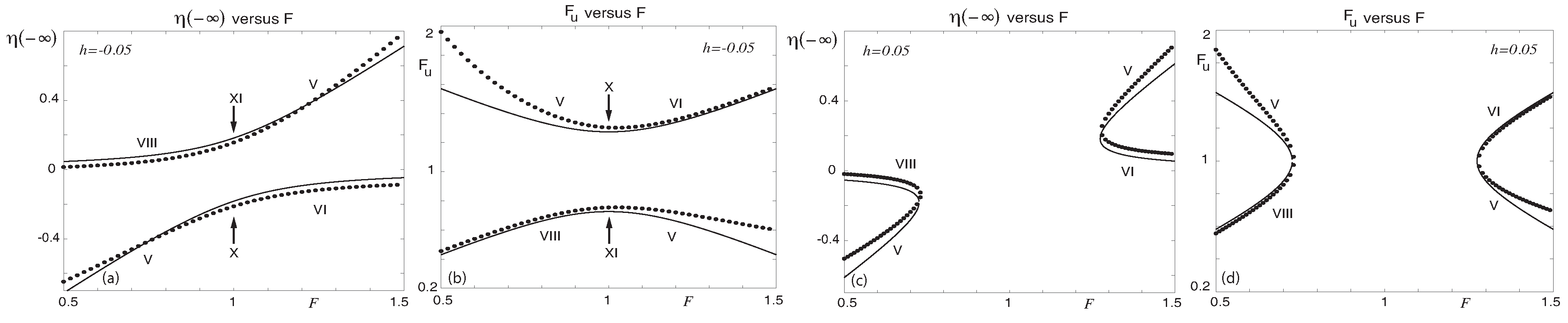
is presented in
Figure 8, and qualitatively similar results are also found for other non-zero values of the step height,
. In the case of when
, we see that there is a gap in the solution space around the value of
in
Figure 8c,d, and the turning points are given by Equations (
29) and (
33), which correspond to the maximum height of the step. The analysis presented in
Figure 8 illustrates that only five out of the eight basic flow types that are wave-free in the far-field are possible when
. If we recall the case of when
, in which four wave-free solutions are possible (see
Figure 4), we see that the hydraulic fall flow type V is the only common wave-free solution that exists in both problems when either
, or
. Similar to the discussion at the end of
Section 3.1, for the results shown in
Figure 4, it is important to recognise that the above analysis does not guarantee the existence of the five solutions that are wave-free in the far-field for flow over a step, it merely indicates the possibility of their existence in flows where
and
. For example, the flow types VIII, X and XI do not exist for flow over a (single) step [
54]. This is because the analysis, presented in
Figure 8, only depends on the horizontal level of the channel bottom far upstream and far downstream, and in general this is independent of the precise details of the disturbance in the channel, including the disturbance of a single step up, or step down in the channel bed topography at
(e.g., see
Figure 7). In other words, the analysis presented in
Figure 4 and
Figure 8 is applicable to more complicated flow configurations, where there may be a combination of the three types of disturbances (plate, bump and step) in the channel, with uniform flow as
. These types of flows, with multiple disturbances in the channel, are often referred to as hybrid flows.
3.5. Hybrid Flows
A hybrid flow refers to a problem when more than one of the disturbances (plate, bump and single step) are placed in the channel [
28,
33,
35,
44,
50,
56,
57,
58,
59,
84]. As the number of disturbances in the channel increases, identifying and classifying the types of flows becomes increasingly difficult, and is often counter-intuitive. The computation of a numerical solution to the hybrid flow problem requires the determination of the number of independent parameters in the numerical scheme and their approximate values. This has often been facilitated with prior knowledge and understanding on how to construct the solution in the weakly nonlinear phase space of the problem. In this work, we continue to focus on solutions that are wave-free in the far-field, with reference to the hybrid flows presented in
Figure 2,
Figure 9 and
Figure 10.
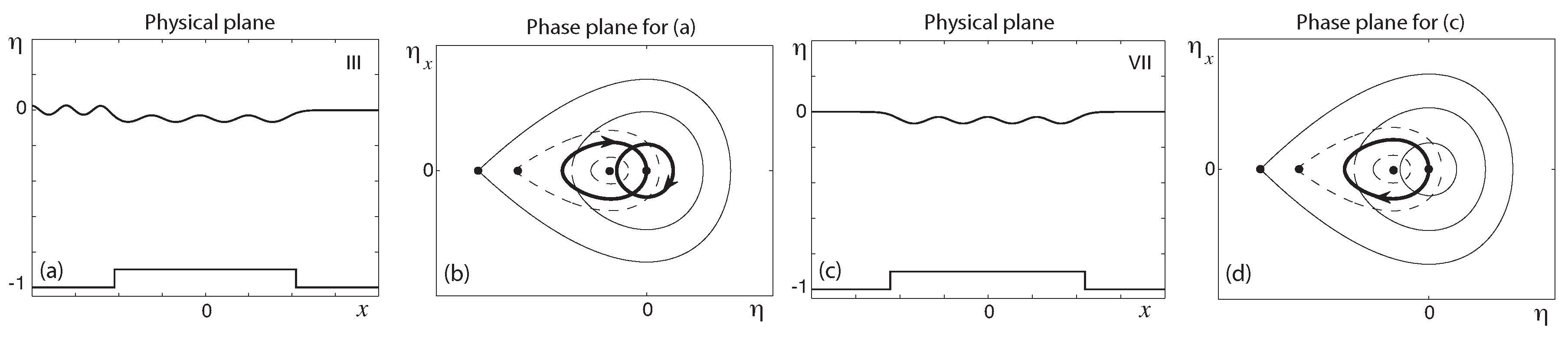
Figure 2 is an example of a hydraulic fall flow type V, which we have already discussed in the simpler problems of flow past a bump and (single) step (up or down) in the otherwise horizontal channel bed topography. Therefore, we shall begin our discussion in earnest with the results for subcritical flow over a long rectangular bump, or a step-up followed by a step-down (i.e., two steps), as is shown in
Figure 9a,b. The periodic waves upstream of the long-bump correspond to the bold periodic orbit that encircles the centre located at the origin in the phase space. At the location of the upstream edge of the long-bump, there is a continuous movement to the bold period orbit that encircles the other centre, to the left of the origin in the phase space, and in physical space this corresponds to the waves located directly above the long-bump. At the location of the downstream edge of the long-bump, there is a continuous movement into the centre at the origin in phase space. The number of independent parameters for this solution is three, and it is an example of the basic flow type III. The parameters
and
determine both the general layout of the two phase planes (broken and solid curves, with four equilibria) and the amplitude of the waves directly above the bump, and the length of the bump,
, determines the amplitude of the waves upstream of the long-bump. Note that the flow does not satisfy the radiation condition as there are waves entering system at
, and this can be remedied by reversing the direction of the flow. Alternatively, we can eliminate the waves far upstream (see
Figure 9c) by allowing the length of the bump to come as a part of the solution to ensure that the two continuous movements from the bold periodic orbit shown in
Figure 9d are precisely away from and into the centre located at the origin in the phase space. Additionally, analysis in the phase space shows that the elimination of the waves far upstream does not occur for just one value of
B, but rather a discrete set of values of
B that are each approximately one wavelength apart. This is a non-trivial solution for subcritical flow type VII with uniform flow in the far-field, which can be further classified as a perturbation of a uniform subcritical stream (see
Figure 3e and
Figure 4b,c).
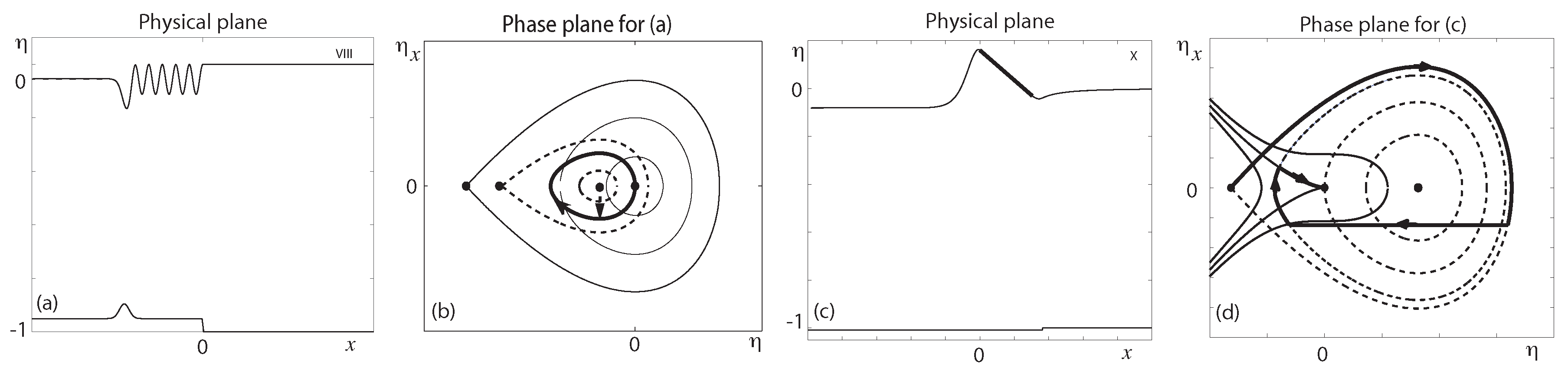
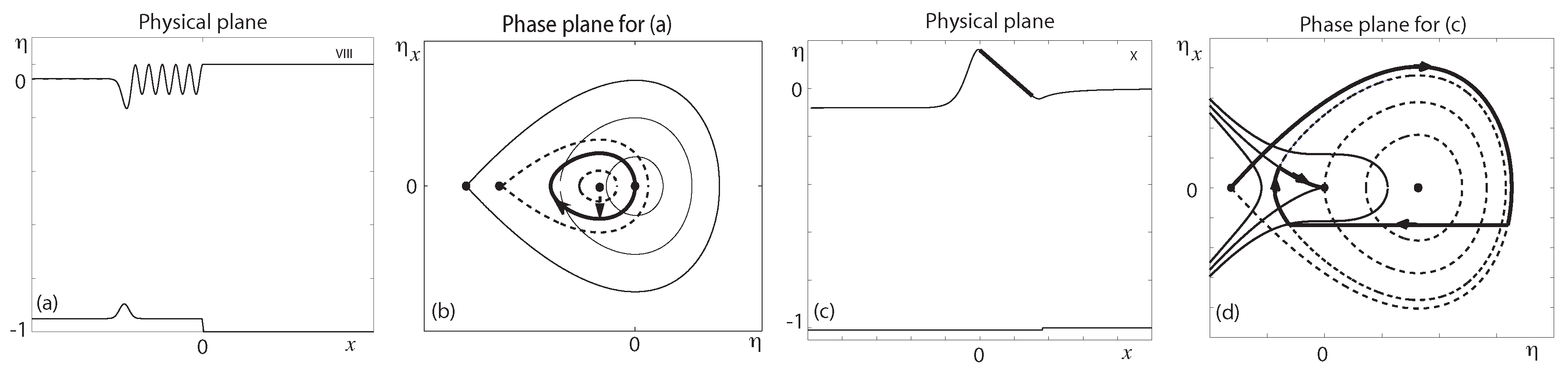
Hybrid solutions for the basic flow types VIII and X are presented in
Figure 10. These two solution types are wave-free in the far-field and a comparison between weakly nonlinear approximations and exact solutions to the full problem is illustrated in
Figure 8 (for values of
). We have now seen and discussed at least one example for each of the first ten basic flow types listed in the Introduction of this paper, and instead of presenting an example for the remaining eleventh basic flow type, we choose to discuss one way in which such a solution could be constructed.
Recall that the basic flow type XI is characterised by uniform flow in the far-field with
and
. The analysis presented in
Figure 4 and
Figure 8 is therefore applicable to this flow type, and more specifically,
Figure 8a,b show that
. This means that we should examine the two phase planes corresponding to
with
and
to see whether it is possible to construct a hybrid flow (e.g., see solid and broken curves in
Figure 7d and
Figure 10d). We also know that the solution must begin its journey at the (only) centre in the phase space for a value of
(e.g., see
Figure 7d). Therefore, the hybrid flow type XI could be obtained by simply introducing a small bump into the otherwise horizontal topography upstream of the step for the flow presented in
Figure 7c,d. The precise location of the bump,
, and the amplitude of forcing,
, must then come as part of the solution to ensure that there is a vertical jump from the centre onto the periodic orbit that intersects with origin in the phase space (see
Figure 7d). Although the location of the bump must come as part of the solution, it is not unique because the waves upstream of the bump can be eliminated for an infinite number of (unknown) discrete values of
, and hence it is possible to trap any number of waves in between the bump and step. It should now be clear that it is possible to construct hybrid flows for all eleven basic flow types I–XI.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}