
Combination of Integral Transforms and Linear Optimization for Source Reconstruction in Heat and Mass Diffusion Problems
 , , ,
, , ,  and
and
Abstract
1. Introduction
2. Classical Integral Transform Technique
3. Source Term Reconstruction
Simulated Data and Error Propagation Control
4. Benchmark Examples
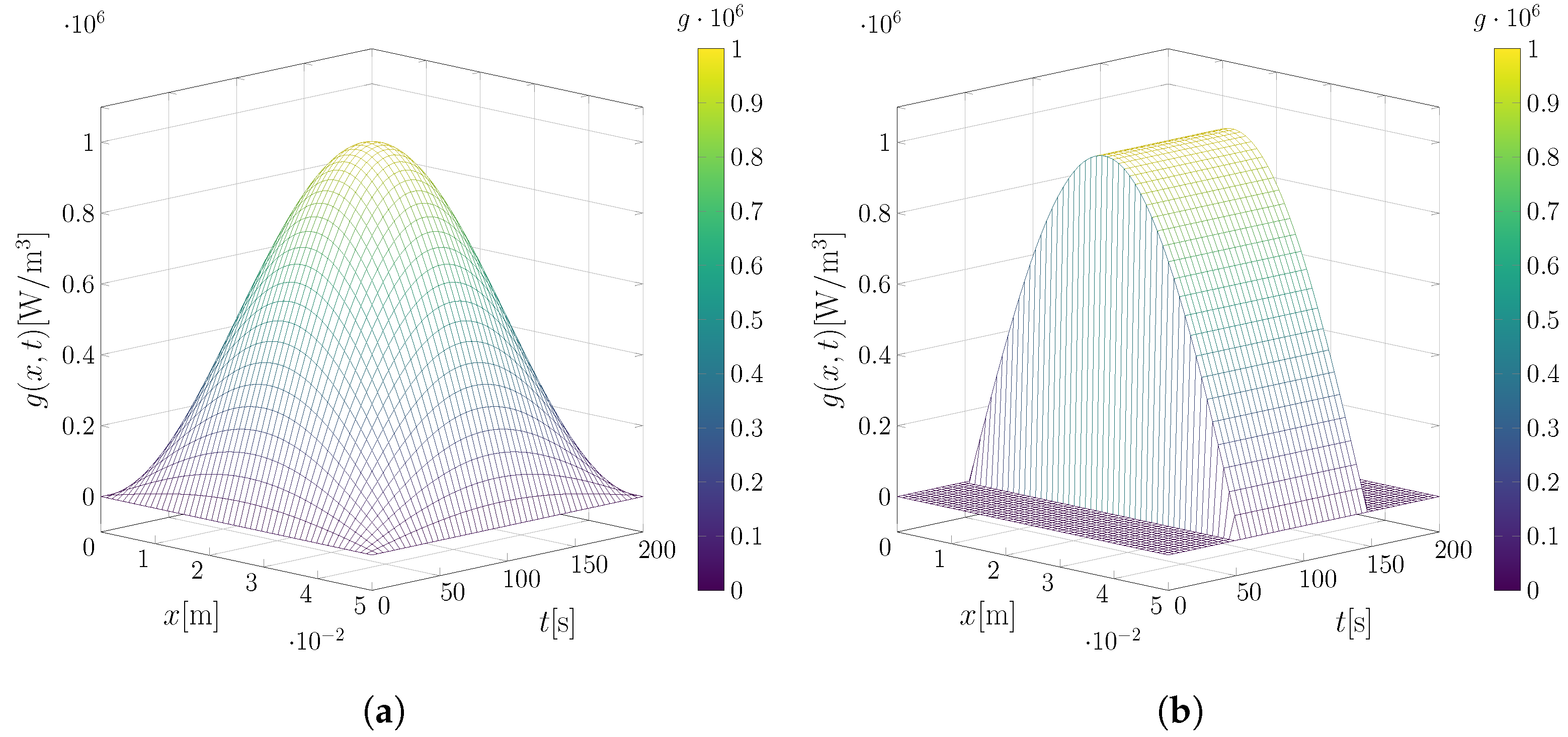
4.1. One-Dimensional Case
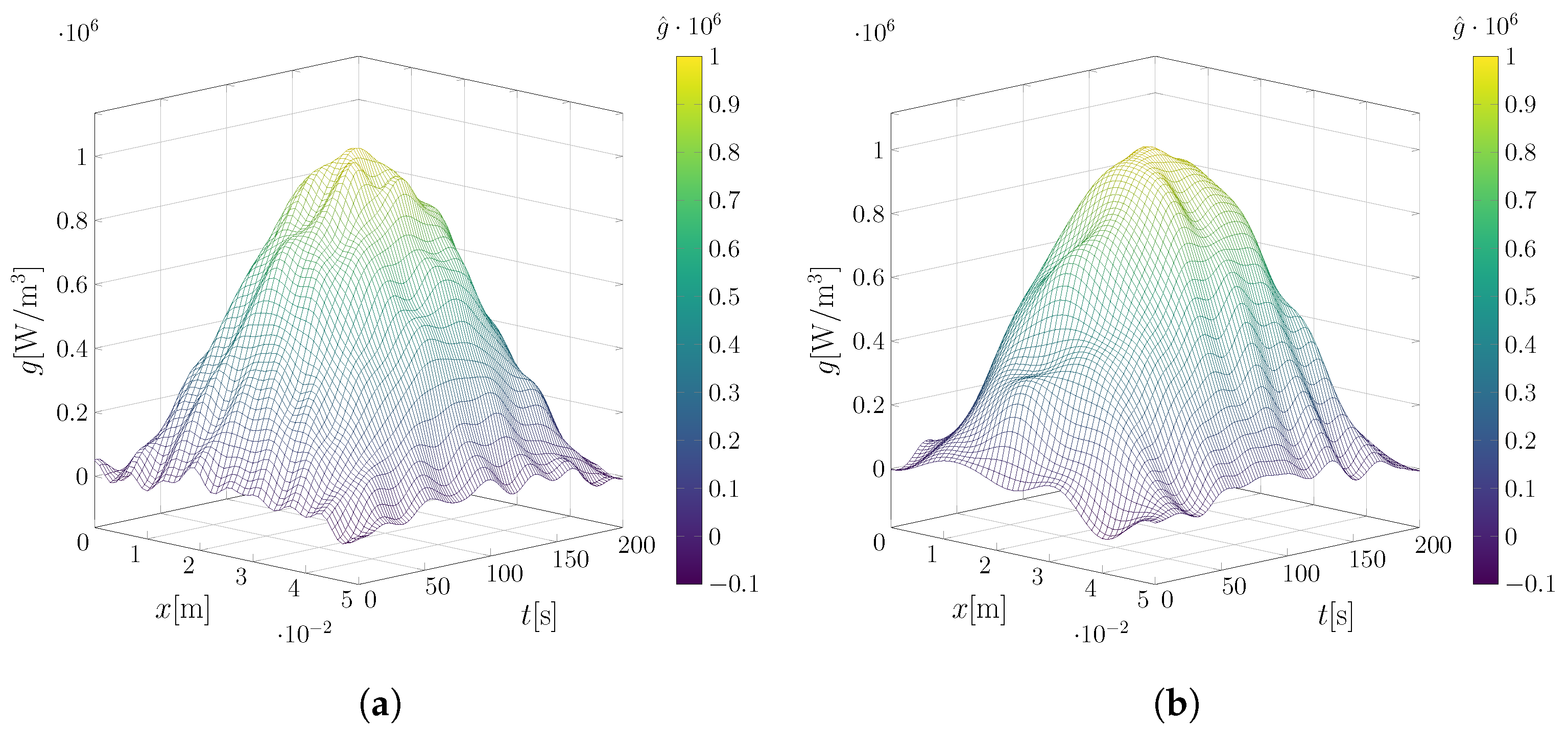
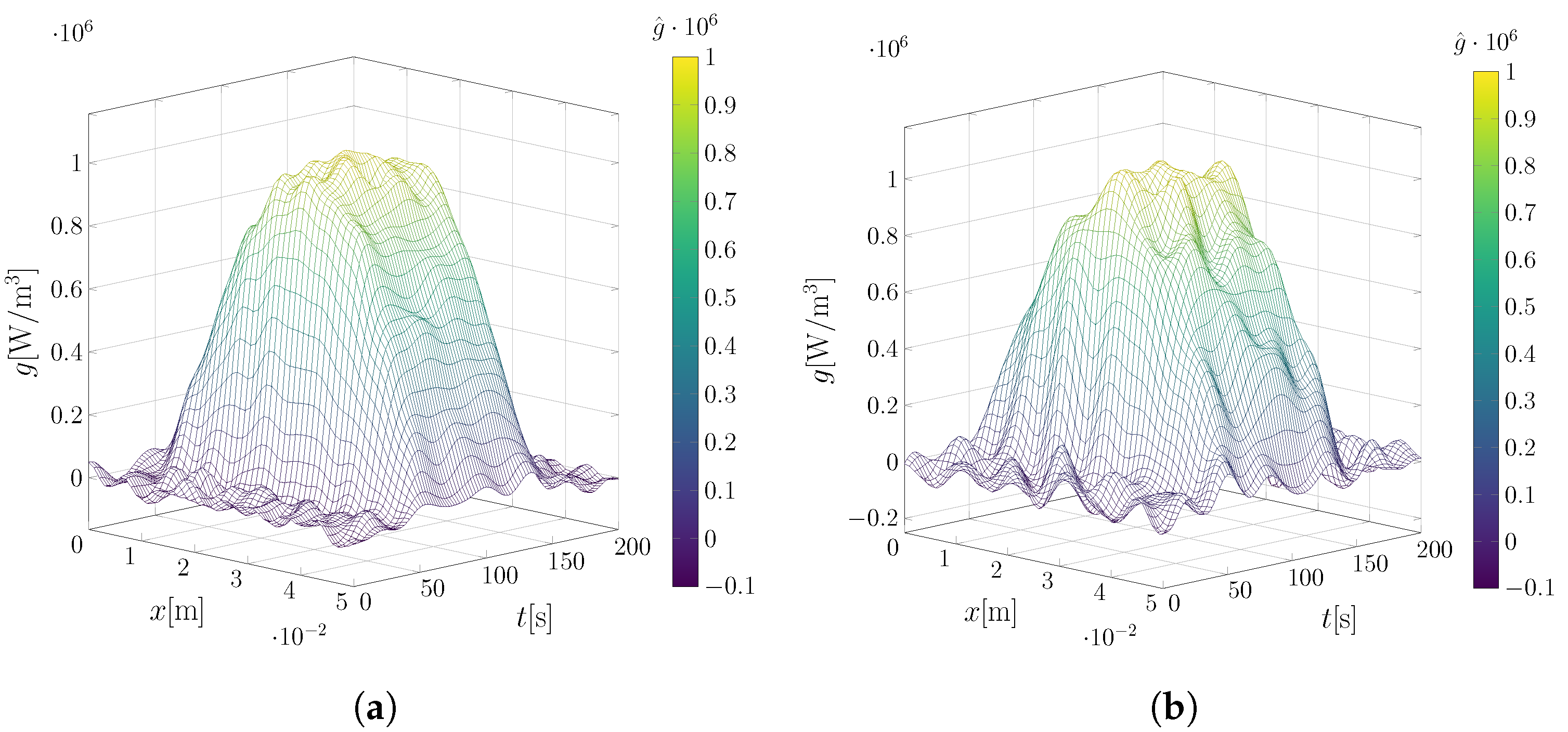
4.2. Two-Dimensional Case
5. Numerical Results
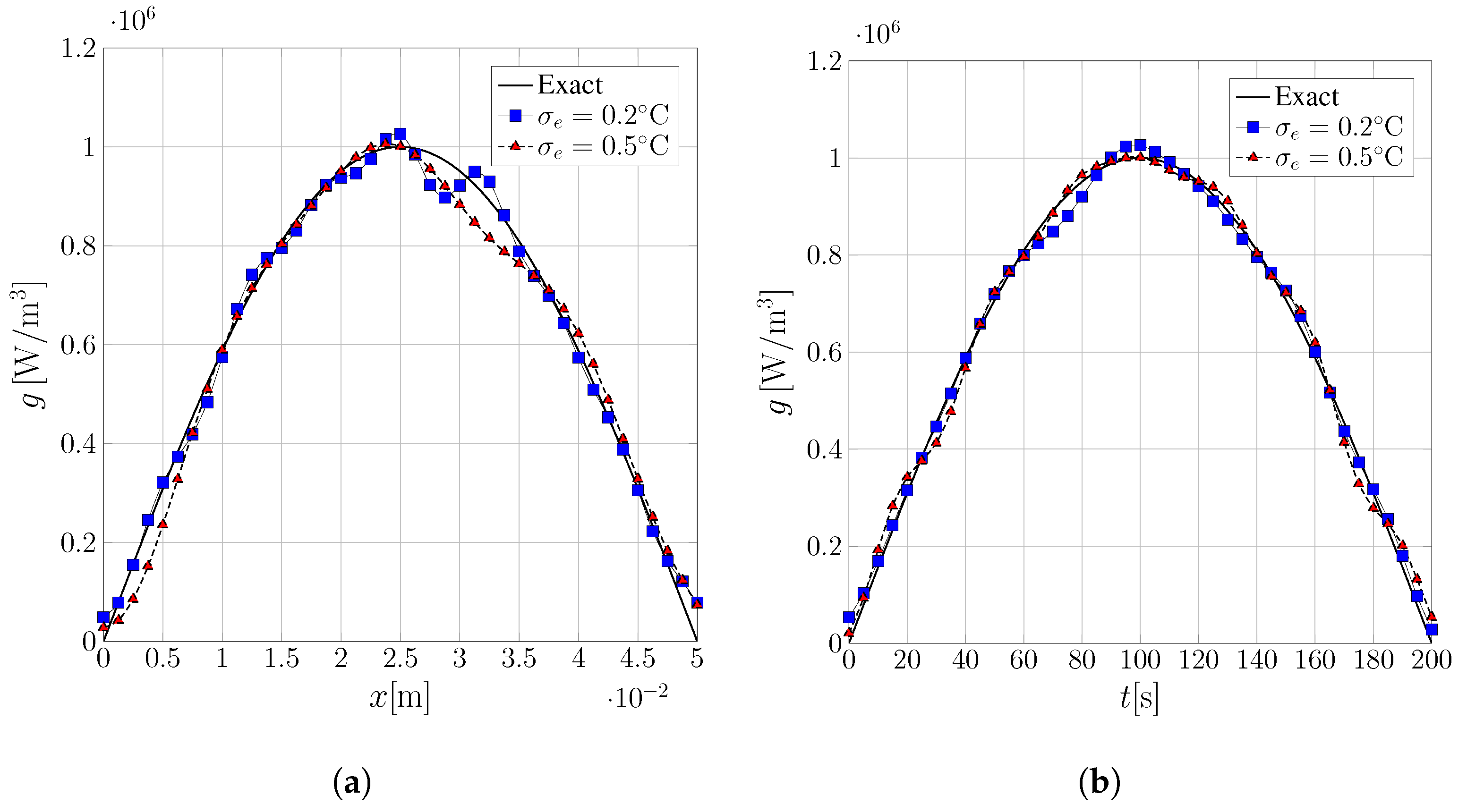
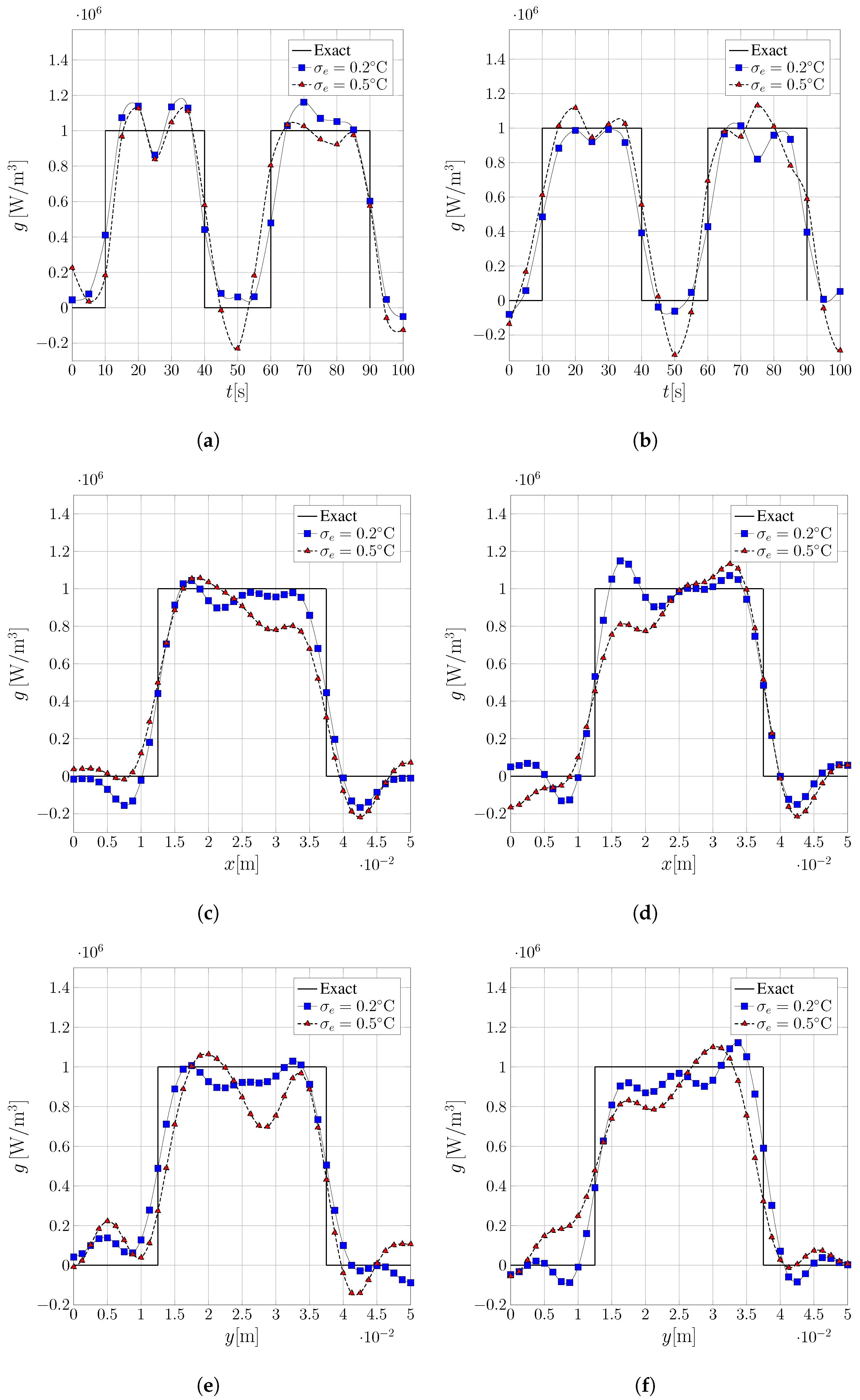
5.1. One-Dimensional Analysis
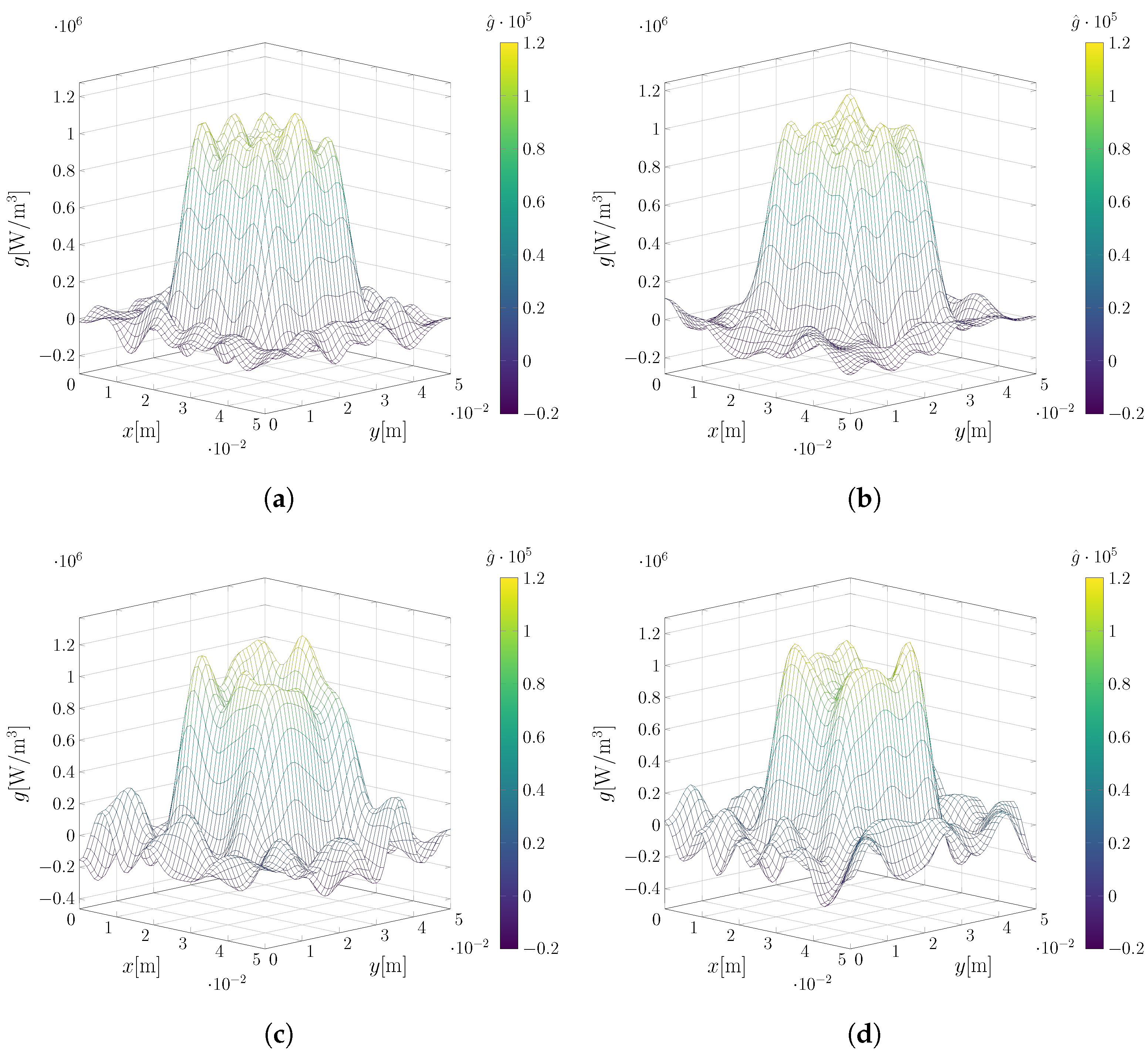
5.2. Two-Dimensional
6. Concluding Remarks
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| IHTP | Inverse Heat Transfer Problem |
| CITT | Classical Integral Transform Technique |
| RMSE | Root Mean Square Error |
| SVD | Singular Value Decomposition |
| LASSO | Least Absolute Shrinkage and Selection Operator |
| MRF | Markov Random Field |
Nomenclature
| d | linear dissipation coefficient |
| f | initial function |
| g | volumetric heat source term |
| vector of temporal expansion coefficients | |
| h | convective heat transfer coefficient |
| identity matrix | |
| sensitivity matrix | |
| k | diffusion coefficient |
| M | truncation order of the direct problem solution |
| outward-drawn normal to the surface | |
| number of temporal coefficients in the expansion | |
| number of experimental data points | |
| normalization integral | |
| number of parameters | |
| truncation order of the inverse problem solution | |
| q | source intensity |
| residual vector | |
| S | objective function |
| t | time variable |
| final time of the observation | |
| w | capacity coefficient |
| x | spatial coordinate |
| vector containing the spatial coordinates | |
| X | eigenfunction of the Sturm–Liouville problem in x |
| y | spatial coordinate |
| Y | eigenfunction of the Sturm–Liouville problem in y |
| Greek letters | |
| potential boundary condition coefficient | |
| flux boundary condition coefficient | |
| eigenvalue of the Sturm–Liouville problem | |
| measurement noise | |
| eigenvalue of the Sturm–Liouville problem | |
| normal distribution | |
| Tikhonov regularization parameter | |
| general eigenvalue of the Sturm–Liouville problem | |
| general boundary function | |
| standard deviation of measurement noise | |
| temperature or concentration field | |
| external environment temperature | |
| initial temperature | |
| filter | |
| numerical solution | |
| simulated experimental data | |
| general eigenfunction of the Sturm–Liouville problem | |
| domain region | |
| Subscripts and superscripts | |
| * | filtered |
| ^ | computed via expansion or truncated solution |
| ¯ | integral transform |
| ˜ | normalized eigenfunction |
| index of eigenfunctions and eigenvalues | |
| s | spatial and temporal location of the simulated experimental data |
| n | Gauss–Newton iteration |
References
- Knupp, D.C. Integral transform technique for the direct identification of thermal conductivity and thermal capacity in heterogeneous media. Int. J. Heat Mass Transf. 2021, 171, 121120. [Google Scholar] [CrossRef]
- Huang, C.H.; Yan, J.Y. An inverse problem in simultaneously measuring temperature-dependent thermal conductivity and heat capacity. Int. J. Heat Mass Transf. 1995, 38, 3433–3441. [Google Scholar] [CrossRef]
- Yang, C.Y. Determination of the temperature dependent thermophysical properties from temperature responses measured at medium’s boundaries. Int. J. Heat Mass Transf. 2000, 43, 1261–1270. [Google Scholar] [CrossRef]
- Kubo, S.; Nambu, H. Estimation of Unknown Boundary Values from Inner Displacement and Strain Measurements and Regularization Using Rank Reduction Method. In Inverse Problems in Engineering Mechanics IV; Tanaka, M., Ed.; Elsevier Science B.V.: Amsterdam, The Netherlands, 2003; pp. 75–83. [Google Scholar] [CrossRef]
- Onishi, K.; Ohura, Y. Direct Method for Solution of Inverse Boundary Value Problem of the Laplace Equation. In Inverse Problems in Engineering Mechanics III; Tanaka, M., Dulikravich, G., Eds.; Elsevier Science Ltd.: Oxford, UK, 2002; pp. 219–226. [Google Scholar] [CrossRef]
- Mehrabanian, K.; Abbas Nejad, A. A new approach for the heat source estimation in cancerous tissue treatment with hyperthermia. Int. J. Therm. Sci. 2023, 194, 108593. [Google Scholar] [CrossRef]
- de Oliveira, A.J.; Knupp, D.C.; Abreu, L.A. Integral transforms for explicit source estimation in non-linear advection-diffusion problems. Appl. Math. Comput. 2025, 487, 129092. [Google Scholar] [CrossRef]
- Alifanov, O. Inverse Heat Transfer Problems; International Series in Heat and Mass Transfer; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Moura Neto, F.D.; Silva Neto, A.J.d. An Introduction to Inverse Problems with Applications, 1st ed.; Springer: Berlin/Heidelberg, Germany, 2013; pp. XXII, 246. [Google Scholar] [CrossRef]
- Kirsch, A. An Introduction to the Mathematical Theory of Inverse Problems, 3rd ed.; Applied Mathematical Sciences; Springer: Cham, Switzerland, 2021; pp. XVII, 400. [Google Scholar] [CrossRef]
- Hasanoğlu, A.H.; Romanov, V.G. Introduction to Inverse Problems for Differential Equations, 2nd ed.; Springer: Cham, Switzerland, 2021; pp. XVII, 515. [Google Scholar] [CrossRef]
- Beck, J.V.; Arnold, K.J. Parameter Estimation in Engineering and Science; Wiley: New York, NY, USA, 1977. [Google Scholar]
- Kaipio, J.P.; Somersalo, E. Statistical and Computational Inverse Problems, 1st ed.; Applied Mathematical Sciences; Springer: New York, NY, USA, 2005; Volume 160, pp. XVI, 340. [Google Scholar] [CrossRef]
- Ozisik, M.N. Inverse Heat Transfer: Fundamentals and Applications; Routledge: London, UK, 2018. [Google Scholar]
- Permanoon, E.; Mazaheri, M.; Amiri, S. An analytical solution for the advection-dispersion equation inversely in time for pollution source identification. Phys. Chem. Earth Parts A/B/C 2022, 128, 103255. [Google Scholar] [CrossRef]
- Mahar, P.; Datta, B. Identification of Pollution Sources in Transient Groundwater Systems. Water Resour. Manag. 2000, 14, 209–227. [Google Scholar] [CrossRef]
- Ling, C.; Revil, A.; Abdulsamad, F.; Qi, Y.; Soueid Ahmed, A.; Shi, P.; Nicaise, S.; Peyras, L. Leakage detection of water reservoirs using a Mise-à-la-Masse approach. J. Hydrol. 2019, 572, 51–65. [Google Scholar] [CrossRef]
- Shrivastava, R.; Oza, R.B. Development of Kalman Filter Based Source Term Estimation Model (STEM). In Advances in Risk and Reliability Modelling and Assessment; Varde, P.V., Vinod, G., Joshi, N.S., Eds.; Springer: Singapore, 2024; pp. 73–79. [Google Scholar]
- Baghban, M.; Ayani, M. Source term prediction in a multilayer tissue during hyperthermia. J. Therm. Biol. 2015, 52, 187–191. [Google Scholar] [CrossRef]
- Bailly du Bois, P.; Laguionie, P.; Boust, D.; Korsakissok, I.; Didier, D.; Fiévet, B. Estimation of marine source-term following Fukushima Dai-ichi accident. J. Environ. Radioact. 2012, 114, 2–9. [Google Scholar] [CrossRef]
- Luo, J.; Li, X.; Xiong, Y.; Liu, Y. Groundwater pollution source identification using Metropolis-Hasting algorithm combined with Kalman filter algorithm. J. Hydrol. 2023, 626, 130258. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, B.; Zhu, Z.; Wang, R.; Chen, F.; Zhao, Y.; Zhang, L. A hybrid strategy on combining different optimization algorithms for hazardous gas source term estimation in field cases. Process Saf. Environ. Prot. 2020, 138, 27–38. [Google Scholar] [CrossRef]
- Massard, H.; Fudym, O.; Orlande, H.; Batsale, J. Nodal predictive error model and Bayesian approach for thermal diffusivity and heat source mapping. Comptes Rendus MéCanique 2010, 338, 434–449. [Google Scholar] [CrossRef]
- Massard, H.; Orlande, H.R.B.; Fudym, O. Estimation of position-dependent transient heat source with the Kalman filter. Inverse Probl. Sci. Eng. 2012, 20, 1079–1099. [Google Scholar] [CrossRef]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, D.; Zhang, L. Estimation of moving heat source for an instantaneous three-dimensional heat transfer system based on step-renewed Kalman filter. Int. J. Heat Mass Transf. 2020, 163, 120435. [Google Scholar] [CrossRef]
- Negreiros, A.; Knupp, D.; Abreu, L.; Silva Neto, A. Explicit reconstruction of space- and time-dependent heat sources with integral transforms. Numer. Heat Transf. Part Fundam. 2020, 79, 216–233. [Google Scholar] [CrossRef]
- de Oliveira, A.; Knupp, D.; Abreu, L.; Pelta, D.; Silva Neto, A.J. Improved Inverse Explicit Method for Three-Dimensional Source Term Estimation With the Classical Integral Transform Technique. Asme J. Heat Mass Transf. 2025, 147, 071402. [Google Scholar] [CrossRef]
- Kuo, C.L.; Liu, C.S.; Chang, J.R. The modified polynomial expansion method for identifying the time dependent heat source in two-dimensional heat conduction problems. Int. J. Heat Mass Transf. 2016, 92, 658–664. [Google Scholar] [CrossRef]
- Golsorkhi, N.; Tehrani, H. Levenberg-Marquardt Method for Solving the Inverse Heat Transfer Problems. J. Math. Comput. Sci. 2014, 13, 300–310. [Google Scholar] [CrossRef]
- Levenberg, K. A Method for the Solution of Certain Non-Linear Problems in Least Squares. Q. Appl. Math. 1944, 2, 164–168. [Google Scholar] [CrossRef]
- Marquardt, D.W. An Algorithm for Least-Squares Estimation of Nonlinear Parameters. J. Soc. Ind. Appl. Math. 1963, 11, 431–441. [Google Scholar] [CrossRef]
- Wen, J.; Liu, Z.; Wang, S. Conjugate gradient method for simultaneous identification of the source term and initial data in a time-fractional diffusion equation. Appl. Math. Sci. Eng. 2022, 30, 324–338. [Google Scholar] [CrossRef]
- Su, J.; Hewitt, G. Inverse heat conduction problem of estimating time-varying heat transfer coefficient. Numer. Heat Transf. Part-Appl.-Numer. Heat Transf.-Appl. 2004, 45, 777–789. [Google Scholar] [CrossRef]
- Tang, C.; Li, S.; Cui, Z. Least-squares-based three-term conjugate gradient methods. J. Inequal. Appl. 2020, 2020, 27. [Google Scholar] [CrossRef]
- Tikhonov, A.N.; Arsenin, V.I. Solutions of Ill-Posed Problems; Scripta Series in Mathematics, Winston and Distributed Solely; Halsted Press: New York, NY, USA, 1977. [Google Scholar]
- Morozov, V.A. On the solution of functional equations by the method of regularization. Dokl. Akad. Nauk. Sssr 1966, 167, 510–512. [Google Scholar]
- Tibshirani, R. Regression shrinkage and selection via the lasso. J. R. Stat. Soc. Ser. B (Methodol.) 1996, 58, 267–288. [Google Scholar] [CrossRef]
- Hansen, P.C. Rank-Deficient and Discrete Ill-Posed Problems: Numerical Aspects of Linear Inversion; SIAM: Philadelphia, PA, USA, 1998. [Google Scholar]
- Li, S.Z. Markov Random Field Modeling in Image Analysis, 3rd ed.; Advances in Computer Vision and Pattern Recognition; Springer: London, UK, 2009; pp. XXII, 362. [Google Scholar] [CrossRef]
- Wang, J.; Zabaras, N. Using Bayesian statistics in the estimation of heat source in radiation. Int. J. Heat Mass Transf. 2005, 48, 15–29. [Google Scholar] [CrossRef]
- Mikhailov, M.D.; Ozisik, M.N. Unified Analysis and Solutions of Heat and Mass Diffusion; John Wiley and Sons Inc.: New York, NY, USA, 1984. [Google Scholar]
- Cotta, R.M.; Knupp, D.C.; Naveira Cotta, C.P. Analytical Heat and Fluid Flow in Microchannels and Microsystems; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Knupp, D.C.; Abreu, L.A. Explicit boundary heat flux reconstruction employing temperature measurements regularized via truncated eigenfunction expansions. Int. Commun. Heat Mass Transf. 2016, 78, 241–252. [Google Scholar] [CrossRef]
- Hoffmann, J.; Shafer, K. Linear Regression Analysis: Assumptions and Applications; NASW: Washington, DC, USA, 2015. [Google Scholar]
- Fletcher, R. Practical Methods of Optimization, 2nd ed.; John Wiley & Sons: New York, NY, USA, 1987. [Google Scholar]
- Hansen, P.C.; Pereyra, V.; Scherer, G. Least Squares Data Fitting with Applications; Johns Hopkins University Press: Philadelphia, PA, USA, 2013. [Google Scholar] [CrossRef]
- Wolfram Research, Inc. Mathematica, version 13.3; Wolfram Research, Inc.: Champaign, IL, USA, 2023. [Google Scholar]
- Brown, M.S.; Arnold, C.B. Fundamentals of Laser-Material Interaction and Application to Multiscale Surface Modification. In Laser Precision Microfabrication; Sugioka, K., Meunier, M., Piqué, A., Eds.; Springer Series in Materials Science; Springer: Berlin/Heidelberg, Germany, 2010; Volume 135, pp. 91–120. [Google Scholar] [CrossRef]
- Remlova, E.; Feig, V.R.; Kang, Z.; Patel, A.; Ballinger, I.; Ginzburg, A.; Kuosmanen, J.; Fabian, N.; Ishida, K.; Jenkins, J.; et al. Activated Metals to Generate Heat for Biomedical Applications. ACS Mater. Lett. 2023, 5, 2508–2517. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NDSolve | ||||||
|---|---|---|---|---|---|---|
| 50.64 | 51.32 | 51.22 | 51.23 | 51.23 | 51.23 | |
| 64.62 | 64.40 | 64.33 | 64.33 | 64.33 | 64.33 | |
| 64.13 | 64.40 | 64.33 | 64.40 | 64.33 | 64.33 | |
| 51.12 | 51.15 | 51.03 | 51.05 | 51.05 | 51.05 | |
| 25.59 | 25.57 | 25.40 | 25.38 | 25.36 | 25.34 |
| NDSolve | ||||||
|---|---|---|---|---|---|---|
| 46.22 | 46.85 | 46.75 | 46.76 | 46.75 | 46.75 | |
| 57.38 | 57.17 | 57.10 | 57.11 | 57.10 | 57.10 | |
| 56.90 | 57.17 | 57.11 | 57.11 | 57.10 | 57.10 | |
| 46.68 | 46.68 | 46.56 | 46.58 | 46.57 | 46.57 | |
| 24.92 | 24.91 | 24.74 | 24.72 | 24.70 | 24.70 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
de Oliveira, A.J.P.; Knupp, D.C.; Abreu, L.A.S.; Pelta, D.A.; Silva Neto, A.J.d. Combination of Integral Transforms and Linear Optimization for Source Reconstruction in Heat and Mass Diffusion Problems. Fluids 2025, 10, 106. https://doi.org/10.3390/fluids10040106
de Oliveira AJP, Knupp DC, Abreu LAS, Pelta DA, Silva Neto AJd. Combination of Integral Transforms and Linear Optimization for Source Reconstruction in Heat and Mass Diffusion Problems. Fluids. 2025; 10(4):106. https://doi.org/10.3390/fluids10040106
Chicago/Turabian Stylede Oliveira, André J. P., Diego C. Knupp, Luiz A. S. Abreu, David A. Pelta, and Antônio J. da Silva Neto. 2025. "Combination of Integral Transforms and Linear Optimization for Source Reconstruction in Heat and Mass Diffusion Problems" Fluids 10, no. 4: 106. https://doi.org/10.3390/fluids10040106
APA Stylede Oliveira, A. J. P., Knupp, D. C., Abreu, L. A. S., Pelta, D. A., & Silva Neto, A. J. d. (2025). Combination of Integral Transforms and Linear Optimization for Source Reconstruction in Heat and Mass Diffusion Problems. Fluids, 10(4), 106. https://doi.org/10.3390/fluids10040106