
The Land Surface Temperature Synergistic Processor in BEAM: A Prototype towards Sentinel-3


Abstract
:1. Introduction
2. The BEAM Toolbox and the Land Surface Temperature Processor
2.1. Basic ENVISAT Toolbox for (A)ATSR and MERIS (BEAM)
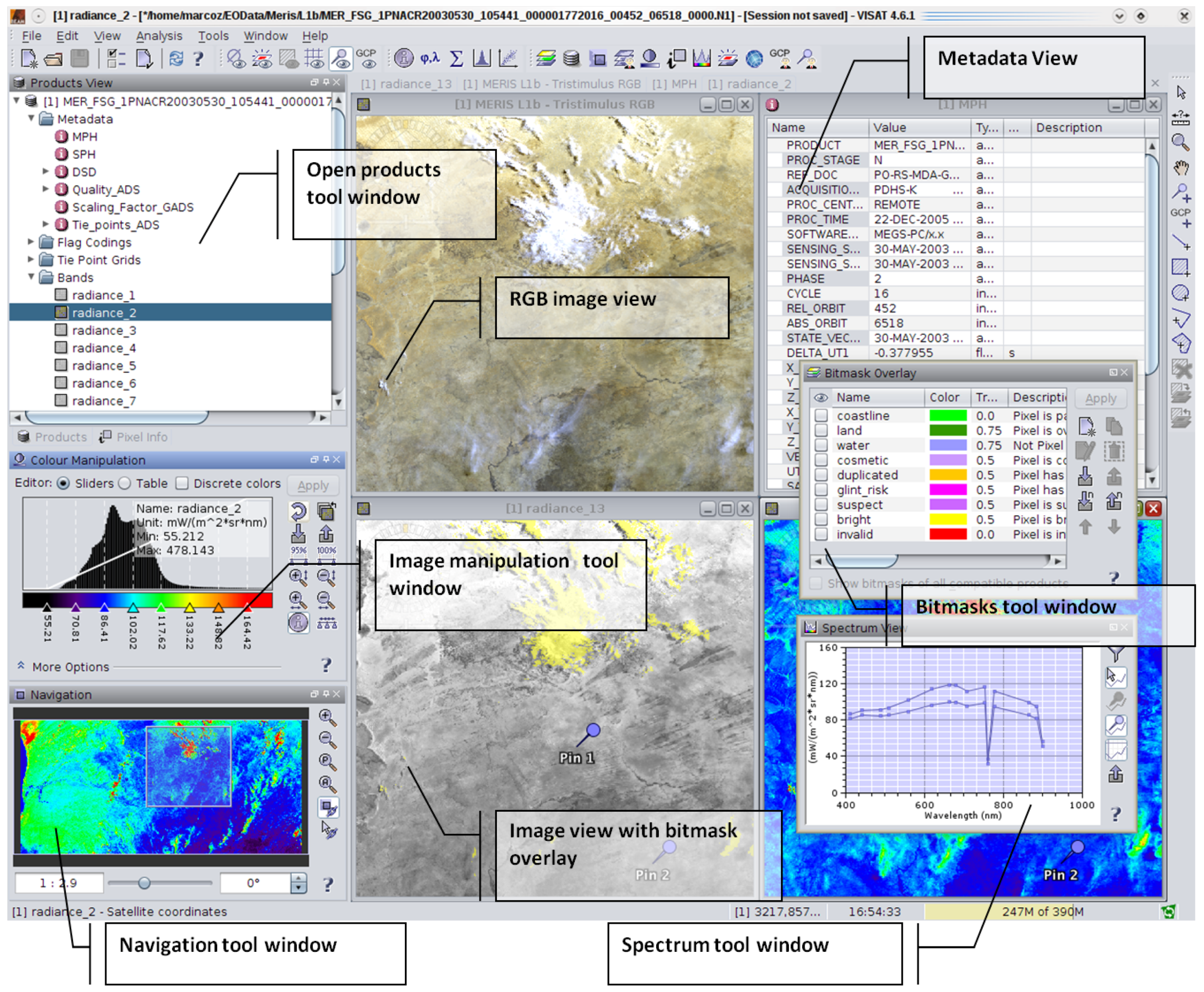
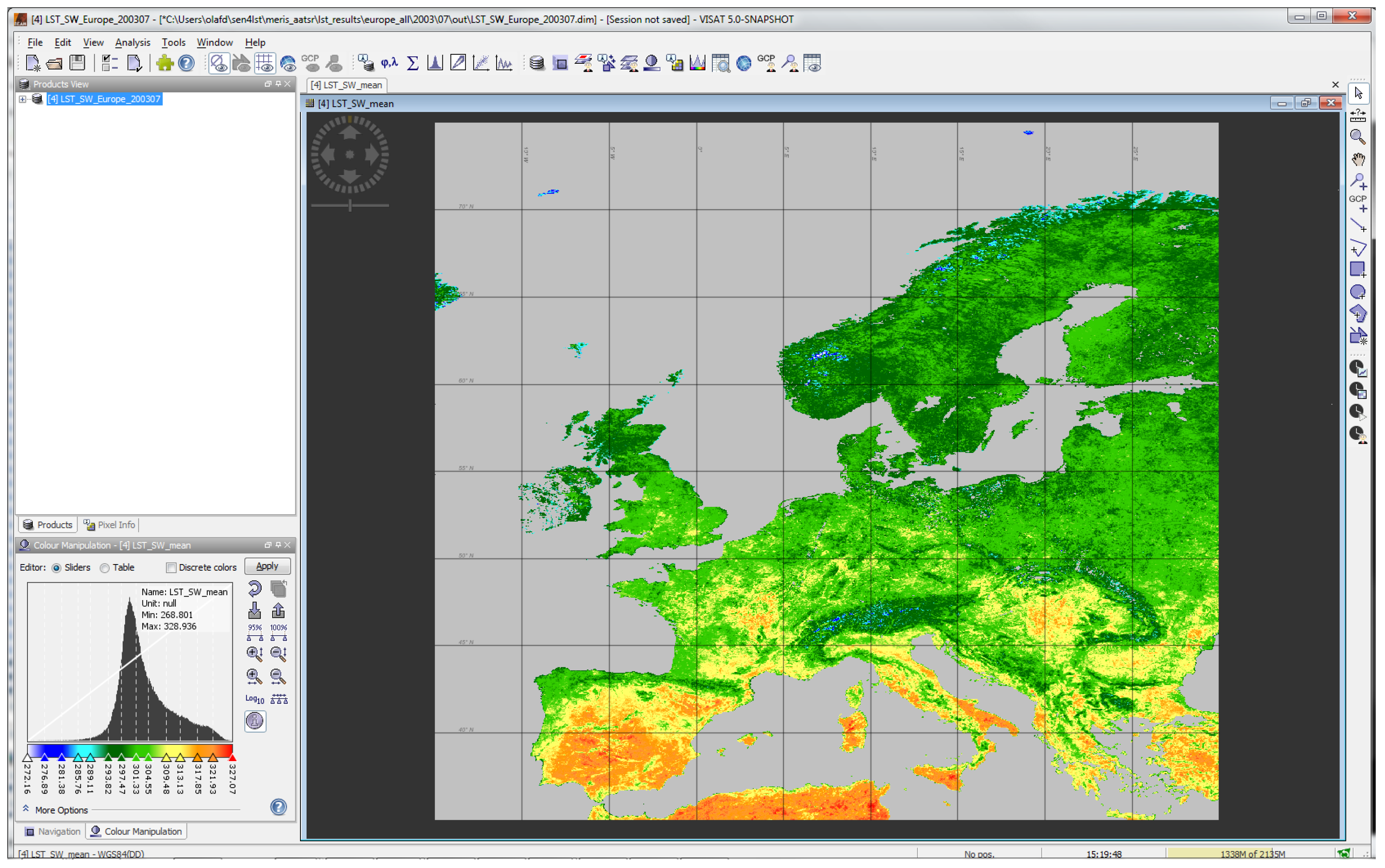
- VISAT: an intuitive desktop application used for Earth Observation (EO) data visualisation, analysis and processing (Figure 1) (version 5, Brockmann Consult GmbH, Geesthacht, Germany).
- A set of scientific data processors running either from the command-line or invoked by VISAT.
- The command-line tool gpt (graph processing tool) is used to execute processing graphs made up of operators nodes developed using the BEAM Graph Processing Framework (GPF, see Java API below) (Brockmann Consult GmbH, Geesthacht, Germany).
- A data product converter tool pconvert (Brockmann Consult GmbH, Geesthacht, Germany) allowing a user to convert raw data products to the BEAM-DIMAP standard format, to GeoTIFF, to HDF-5 or to RGB images.
- A Java™ API which provides ready-to-use components for remote sensing related application development and plug-in points for new BEAM extension modules. Besides a number of extension points such as product reader and writers, the BEAM API comprises the GPF, which is used to rapidly create raster data processors. The VISAT Rich Client Platform is used to develop rich Graphical User Interface (GUI) applications based on BEAM VISAT.
2.2. The LST Processor as a BEAM Plug-In
2.2.1. Theoretical Background of the LST Algorithm
Atmospheric Correction and Cloud Screening
2.2.2. Description of the LST Processor in BEAM
Surface Directional Reflectance: The Synergy Derivation Approach
Land Surface Temperature Retrieval
The OLCI/SLSTR Simulation Mode
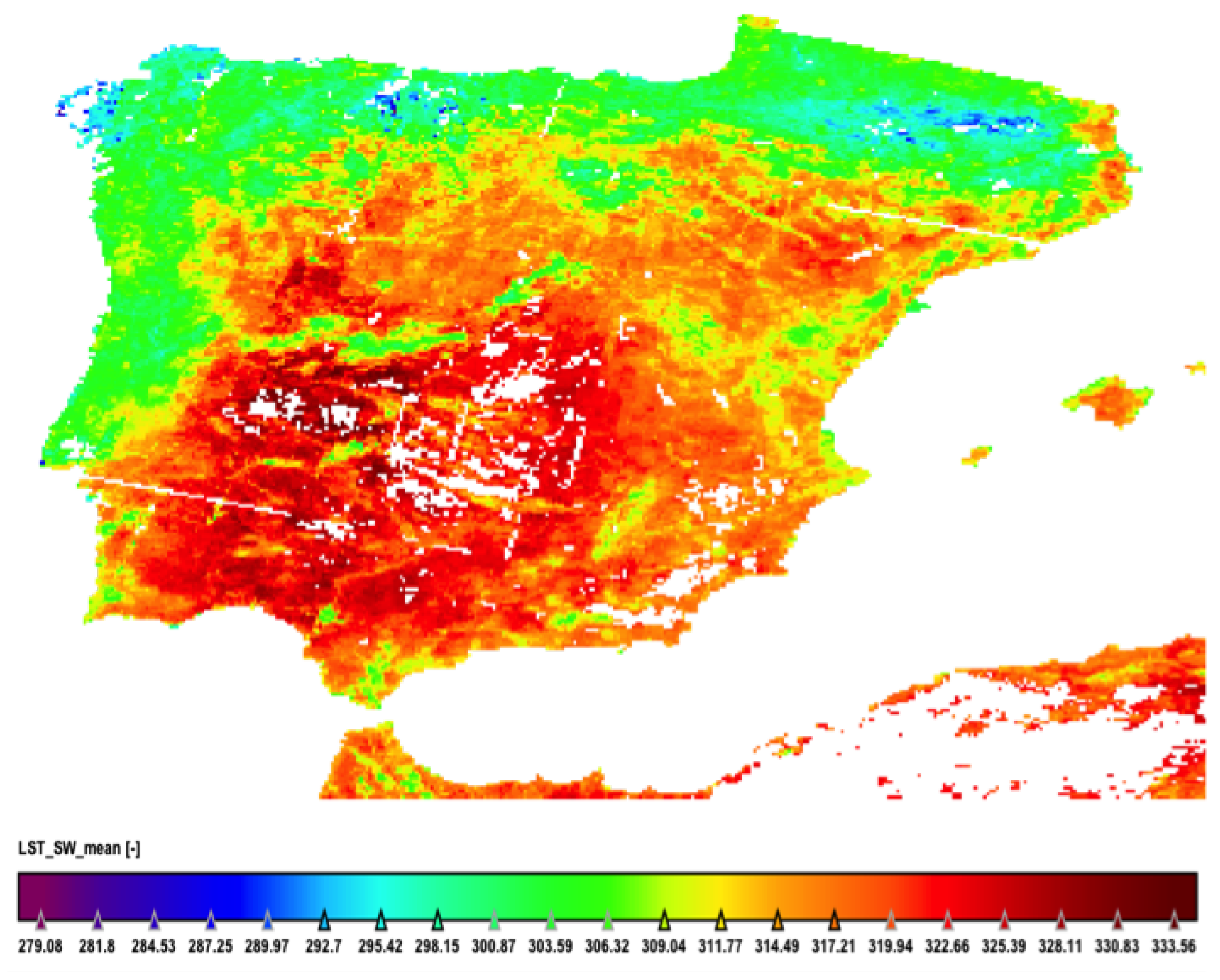
2.2.3. Application to Sample Images
3. Discussion
3.1. Potential Improvements and Updates to the Algorithm
- (1)
- SW coefficients were obtained from simulated data using 61 atmospheric profiles representative of different atmospheric conditions. A new more completed atmospheric database has been recently constructed with around 5000 atmospheric profiles, which could be used to compute a new set of algorithm coefficients. It would be also possible to separate between daytime and nighttime atmospheric profiles, thus providing a set of SW coefficients for daytime acquisitions and another set of SW coefficients for nighttime acquisitions.
- (2)
- Extension of the SEN4LST product to nighttime acquisitions: the SEN4LST product was generated only for daytime acquisitions because the inputs to the algorithm, emissivity and water vapour, are generated from visible and near-infrared (VNIR) data acquired by the MERIS sensor (and VNIR data is only available for daytime acquisitions). SEN4LST product for nighttime acquisitions could be generated by using the same emissivity maps obtained from the daytime acquisitions, since it could be a good approximation. In the case of the atmospheric water vapour, whose variability is higher during the daily cycle, it would be preferable to use some external auxiliary data (i.e., re-analysis). LST methods based on day/night pairs, using the 3.7 μm of SLSTR observations could also be taken into account in future research.
- (3)
- Synergy between high resolution and low resolution data for surface emissivity retrieval: in the framework of the SEN4LST project a synergy between S2/MSI and S3/OLCI+SLSTR was proposed. However, during the realization of the project it was accorded that “operational and near-real-time processing” should be a main driver to select the best candidate algorithm [34]. For this reason, synergy was focused on OLCI and SLSTR, since both sensors are on board the same platform.
3.2. Potential Improvements and Updates to the Processor
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Malenovskÿ, Z.; Rott, H.; Cihlar, J.; Schaepman, M.E.; García-Santos, G.; Fernandes, R.; Berger, M. Sentinels for science: Potential of Sentinel-1, -2, and -3 missions for scientific observations of ocean, cryosphere, and land. Remote Sens. Environ. 2012, 120, 91–101. [Google Scholar] [CrossRef]
- Berger, M.; Moreno, J.; Johannessen, J.A.; Levelt, P.F.; Hanssen, R.F. Sentinels for science: ESA’s sentinel missions in support of Earth system science. Remote Sens. Environ. 2012, 120, 84–90. [Google Scholar] [CrossRef]
- Donlon, C.; Berruti, B.; Buongiorno, A.; Ferreira, M.-H.; Féménias, P.; Frerick, J.; Goryl, P.; Klein, U.; Laur, H.; Mavrocordatos, C.; et al. The Global Monitoring for Environment and Security (GMES) Sentinel-3 mission. Remote Sens. Environ. 2012, 120, 37–57. [Google Scholar] [CrossRef]
- Nieke, J.; Mavrocordatos, C.; Donlon, C.; Berruti, B.; Garnier, T.; Riti, J.; Delclaud, Y. Ocean and Land Color Imager on Sentinel-3. In Optical Payloads for Space Missions; Qian, S.E., Ed.; John & Wiley & Sons: Hoboken, NJ, USA, 2016; pp. 223–245. [Google Scholar]
- Coppo, P.; Mastrandrea, C.; Stagi, M.; Calamai, L.; Nieke, J. Sea and Land Surface Temperature Radiometer detection assembly design and performance. J. Appl. Remote Sens. 2014, 8. [Google Scholar] [CrossRef]
- Sobrino, J.A. SEN4LST: LST retrieval: Algorithm Theoretical Basis Document. European Space Agency; Contract 22900/09/NL/BJ. 2012; 25. [Google Scholar] [CrossRef]
- Sobrino, J.A.; Jiménez-Muñoz, J.C.; Sòria, G.; Ruescas, A.B.; Danne, O.; Brockmann, C.; Ghent, D.; Remedios, J.; North, P.; Merchant, C.; et al. Synergistic use of MERIS and AATSR as a proxy for estimating Land Surface Temperature from Sentinel-3 data. Remote Sens. Environ. 2016, 179, 149–161. [Google Scholar] [CrossRef]
- Quast, R. MERIS/AATSR Synergy Algorithms for Cloud Screening, Aerosol Retrieval, and Atmospheric Correction, Detail Processing Model (DPM). REF: SYN-BC-DPM. 2010, p. 39. Available online: www.brockmann-consult.de/beam-wiki/download/.../synergy-land_aerosol-atbd.pdf (accessed on 11 October 2016).
- Brockmann, C. Sentinel-3 experimental campaign, final report. European Space Agency Contract Contract No. 22661/09/I-LG. , 2011; p. 294. Available online: https://earth.esa.int/c/document_library/get_file?folderId=21020&name=DLFE-901.pdf (accessed on 11 October 2016).
- The BEAM Earth Observation Toolbox and Development Platform. Available online: http://www.brockmann-consult.de/cms/web/beam/ (accessed on 11 October 2016).
- The Sentinel Application Platform. Available online: http://step.esa.int/main/toolboxes/snap/ (accessed on 11 October 2016).
- Li, Z.L.; Tang, B.; Wu, H.; Ren, H.; Yan, G.; Sobrino, J.A. Satellite derived land surface temperature: Current status and perspectives. Remote Sens. Environ. 2013, 131, 14–37. [Google Scholar] [CrossRef]
- Li, Z.L.; Wu, H.; Wang, N.; Qiu, S.; Sobrino, J.A. Land surface emissivity retrieval from satellite data. Int. J. Remote Sens. 2013, 34, 3084–3127. [Google Scholar] [CrossRef]
- McMillin, L.M. Estimation of Sea Surface Temperatures from Two Infrared Window Measurements with Differential Absorption. J. Geophys. Res. 1975, 80, 5113–5117. [Google Scholar] [CrossRef]
- Gillespie, A.; Rokugawa, S.; Matsinaga, T.; Cothern, J.S.; Hook, S.; Kahle, A.B. A temperature and emissivity separation algorithm for advanced spacerborne thermal emssion and reflection radiometer (ASTER) images. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1113–1126. [Google Scholar] [CrossRef]
- Hulley, G.C.; Hook, S. Generating consistent land surface temperature ans emissivity products between ASTER and MODIS data for Earth science research. IEEE Trans. Geosci. Remote Sens. 1998, 49, 1304–1315. [Google Scholar] [CrossRef]
- Jimenez-Muñoz, J.C.; Sobrino, J.A.; Mattar, C.; Hulley, G.; Gottsche, F.M. Temperature and emissivity separation from MSG/SEVIRI data. IEEE Trans. Geosci. Remote Sens. 1998, 52, 5937–5951. [Google Scholar] [CrossRef]
- Sobrino, J.A.; Jiménez-Muñoz, J.C.; Soria, G.; Romaguera, M.; Guanter, L.; Moreno, J.; Plaza, A.; Martínez, P.M. Land Surface emissivity retrieval from different VNIR and TIR sensors. IEEE Trans. Geosci. Remote Sens. 2008, 46, 316–327. [Google Scholar] [CrossRef]
- Snyder, W.C.; Wan, Z.; Zhang, Y.; Feng, Y.Z. Classification-based emissivity for land surface temperature measurement from space. Int. J. Remote Sens. 1998, 9, 2753–2774. [Google Scholar] [CrossRef]
- Sobrino, J.A.; Li, Z.-L.; Stoll, M.P.; Becker, F. The Global Multi-channel and multi-angle algorithms for estimating sea and land surface temperature with ATSR data. Int. J. Remote Sens. 1996, 17, 2089–2114. [Google Scholar] [CrossRef]
- Sobrino, J.A.; Caselles, V.; Becker, F. Significance of the remotely sensed thermal infrared measurements obtained over a citrus orchard. ISPRS J. Photogramm. Remote Sens. 1990, 44, 343–354. [Google Scholar] [CrossRef]
- Gutman, G.; Ignatov, A. The derivation of the green vegetation fraction from NOAA/AVHRR data for use in numerical weather prediction models. Int. J. Remote Sens. 1998, 19, 1533–1543. [Google Scholar] [CrossRef]
- Jimenez-Muñoz, J.C.; Sobrino, J.A.; Plaza, A.; Guanter, L.; Moreno, J.; Martinez, P. Comparison between fractional vegetation cover retrievals from vegetation indices and spectral mixture analysis: Case study of PROBA CHRIS data over an agricultural area. Sensor 2009, 9, 768–793. [Google Scholar] [CrossRef] [PubMed]
- North, P.R.J.; Brockmann, C.; Fischer, J.; Gomez-Chova, L.; Grey, W.; Heckel, A.; Regner, P. MERIS/AATSR synergy algorithms for cloud screening, aerosol retrieval and atmospheric correction. In Proceedings of the 2nd MERIS/AATSR User Workshop, ESA, Frascati, Italy, 22–26 September 2008.
- North, P.R.J.; Grey, W.; Heckel, A.; Fischer, J.; Preusker, R.; Brockmann, C. MERIS/AATSR synergy: Land aerosol and surface reflectance algorithm theoretical basis document (ATBD). Available online: github.com/downloads/bcdev/beam-meris-aatsr-synergy/synergy-land_aerosol-atbd.pdf (accessed on 20 Otctober 2016).
- Gomez-Chova, L.; Camps-Valls, G.; Calpe-Maravilla, J.; Guanter, L.; Moreno, J. Cloud-Screening Algorithm for ENVISAT/MERIS Multispectral Images. IEEE Trans. Geosci. Remote Sens. 2007, 45, 4105–4118. [Google Scholar] [CrossRef]
- Gomez-Chova, L.; Camps-Valls, G.; Calpe, J.; Munoz, J.; Moreno, J. Cloud screening methodology for MERIS/AATSR synergy products. In Proceedings of the 2nd MERIS/AATSR User Workshop, ESA, Frascati, Italy, 22–26 September 2008.
- Merchant, C.J.; Harris, A.R.; Maturi, E.; MacCallum, S. Probabilistic physically based cloud screening of satellite infrared imagery for operational sea surface temperature retrieval. Q. J. R. Meteorol. Soc. 2005, 131, 2735–2755. [Google Scholar] [CrossRef]
- Ruescas, A.B. SEN4LST: Technical note -1: Simulation of Sentinel 3 OLCI and SLSTR sensors. European Space Agency; Contract contract 22900/09/NL/BJ. 2012; 14. [Google Scholar] [CrossRef]
- Ruescas, A.B. SEN4LST: Technical Note -2: New Simulation of Sentinel 3 SLSTR TIR Bands. European Space Agency; Contract contract 22900/09/NL/BJ. 2012; 12. [Google Scholar] [CrossRef]
- Danne, O. SEN4LST: LST Processor Technical Specifications. European Space Agency Contract contract 22900/09/NL/BJ. , 2013; p. 30. Available online: https://www.researchgate.net/publication/308019709_LST_Processor_Technical_Specification (accessed on 20 October 2016).
- Jimenez-Muñoz, J.C. SEN4LST: Validation report. European Space Agency; Contract 22900/09/NL/BJ. 2012; 46. [Google Scholar] [CrossRef]
- Prata, F.; Zeller, O.; Corlett, G.; Remedios, J.; Kogler, C. Land Surface Temperature Determination from the ATSR-Family of Instruments and the Sentinel-3 SLSTR. 2010. Available online: https://cimss.ssec.wisc.edu/itwg/itsc/itsc17/posters/5.8_prata.pdf (accessed on 20 October 2016).
- Sobrino, J.A. SEN4LST: Baseline Retrieval Concept and Justification. European Space Agency; Contract 22900/09/NL/BJ. 2012; 43. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Name | Unit |
|---|---|---|
| Solar irradiance at TOA | ||
| Radiance at TOA | ||
| Reflectance at TOA | ||
| Solar zenith angle | rad |
| Dataset | Band Name | Unit | Dimension #Bytes |
|---|---|---|---|
| All flag bands | l1_flags_MERIS | dl | 5*NL*NC*4 |
| from MERIS/AATSR | confid_flags_nadir_AATSR | ||
| collocation product | confid_flags_fward_AATSR | ||
| cloud_flags_nadir_AATSR | |||
| cloud_flags_fward_AATSR | |||
| Cloud flag | cloud_flags_synergy | dl | NL*NC*4 |
| Latitude and longitude | latitude | deg | 2*NL*NC*4 |
| tie point grids | longitude | deg | 2*NL*NC*4 |
| from MERIS L1 | dl | ||
| AATSR nadir | btemp_nadir_1200_AATSR | K | 3*NL*NC*4 |
| brightness | btemp_nadir_1100_AATSR | K | 3*NL*NC*4 |
| temperature | btemp_nadir_0370_AATSR | K | 3*NL*NC*4 |
| AATSR forward | btemp_fward_1200_AATSR | K | 3*NL*NC*4 |
| brightness | btemp_fward_1100_AATSR | K | 3*NL*NC*4 |
| temperature | btemp_fward_0370_AATSR | K | 3*NL*NC*4 |
| MERIS surface | SynergySDR_620_MERIS | dl | 2*NL*NC*4 |
| reflectance | SynergySDR_753_MERIS | dl | 2*NL*NC*4 |
| at 620 nm and 753 nm | |||
| AATSR nadir | SynergySDR_nadir_555_AATSR | dl | 2*NL*NC*4 |
| surface reflectance | SynergySDR_nadir_659_AATSR | dl | 2*NL*NC*4 |
| at 555 nm and 659 nm | |||
| AATSR forward | SynergySDR_fward_555_AATSR | dl | 2*NL*NC*4 |
| surface reflectance | SynergySDR_fward_AATRS | dl | 2*NL*NC*4 |
| at 555 nm and 659 nm | |||
| Algorithm | Coefficient Name | Coefficient Value |
|---|---|---|
| Dual-Angle (m) | −0.441 | |
| 1.790 | ||
| 0.221 | ||
| 64.26 | ||
| −7.60 | ||
| −30.18 | ||
| 3.14 | ||
| Split-Window (m) | −0.268 | |
| 1.084 | ||
| 0.277 | ||
| 45.11 | ||
| −0.73 | ||
| −125.0 | ||
| 16.70 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ruescas, A.B.; Danne, O.; Fomferra, N.; Brockmann, C. The Land Surface Temperature Synergistic Processor in BEAM: A Prototype towards Sentinel-3. Data 2016, 1, 18. https://doi.org/10.3390/data1030018
Ruescas AB, Danne O, Fomferra N, Brockmann C. The Land Surface Temperature Synergistic Processor in BEAM: A Prototype towards Sentinel-3. Data. 2016; 1(3):18. https://doi.org/10.3390/data1030018
Chicago/Turabian StyleRuescas, Ana Belen, Olaf Danne, Norman Fomferra, and Carsten Brockmann. 2016. "The Land Surface Temperature Synergistic Processor in BEAM: A Prototype towards Sentinel-3" Data 1, no. 3: 18. https://doi.org/10.3390/data1030018
APA StyleRuescas, A. B., Danne, O., Fomferra, N., & Brockmann, C. (2016). The Land Surface Temperature Synergistic Processor in BEAM: A Prototype towards Sentinel-3. Data, 1(3), 18. https://doi.org/10.3390/data1030018