
Top-Down Detection of Eating Episodes by Analyzing Large Windows of Wrist Motion Using a Convolutional Neural Network


Abstract
:1. Introduction
- We are the first group to demonstrate the performance of deep learning on a large dataset (4650 h of data in this work vs. 20 h of wrist motion data in previous works).
- Our classifier is evaluated against a dataset containing significantly more variability than that in previous works.
2. Methods
2.1. Clemson All-Day Dataset
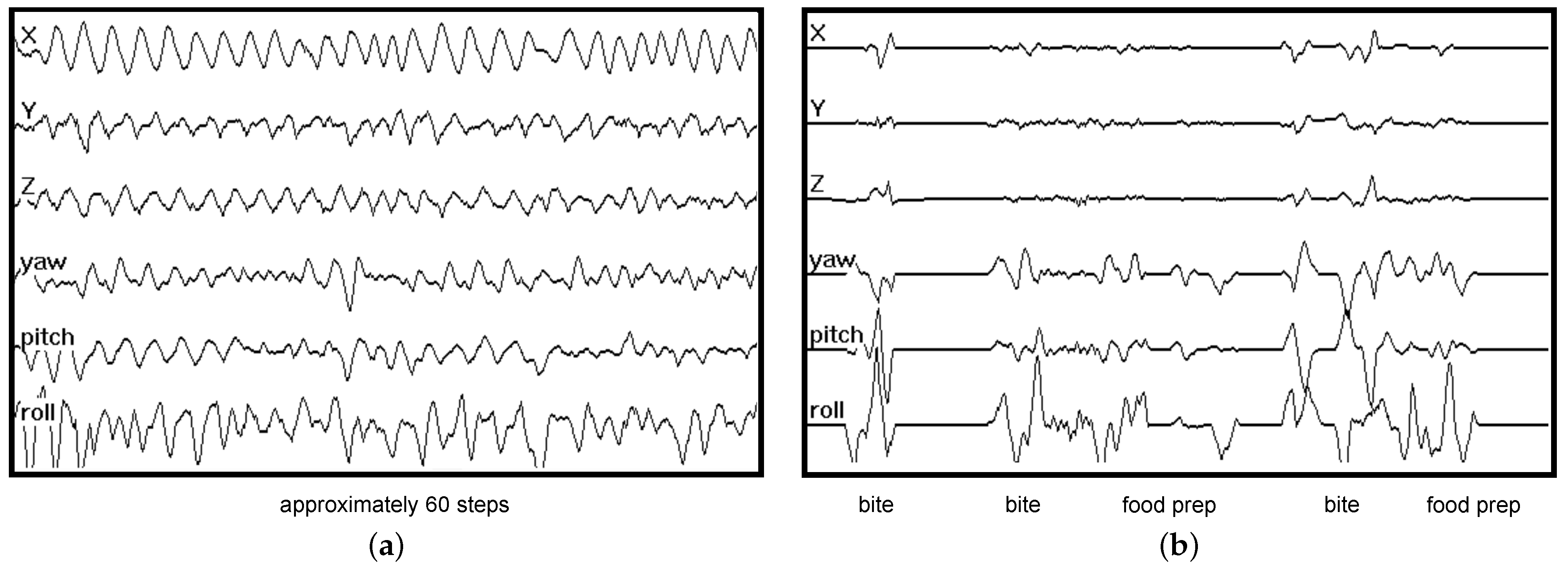
2.2. Pre-Processing
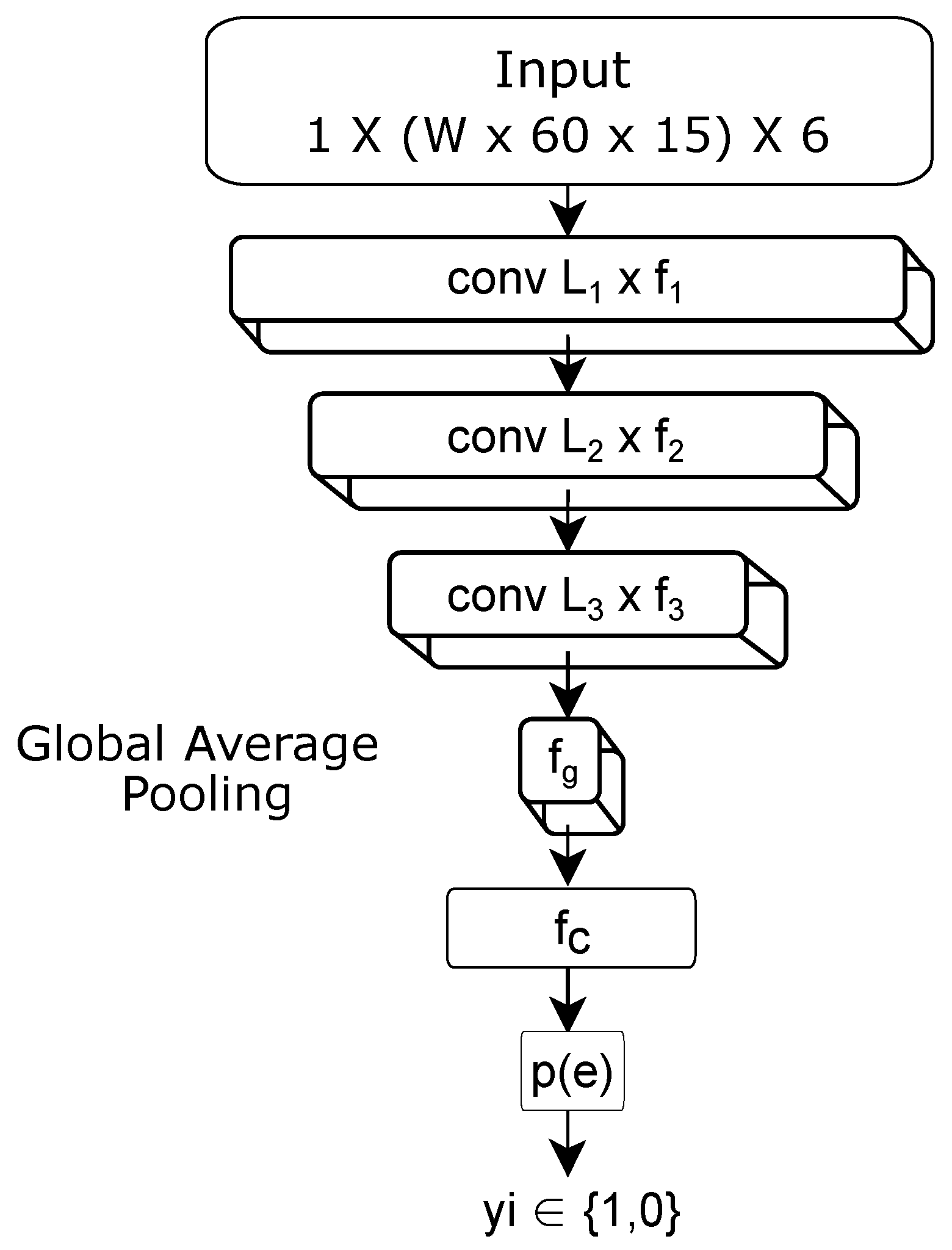
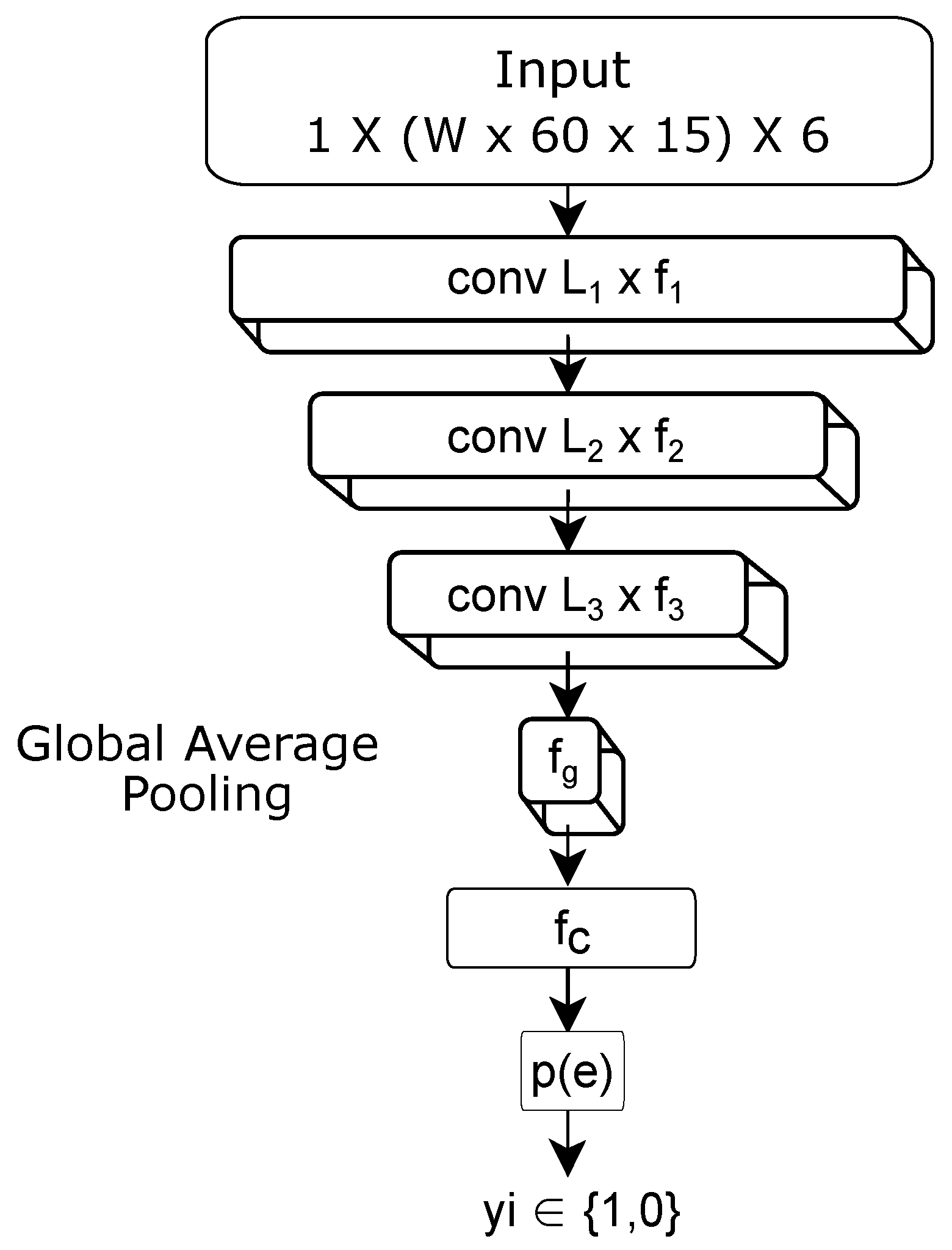
2.3. Neural Network Classifier for Classifying Windows as Eating or Non-Eating
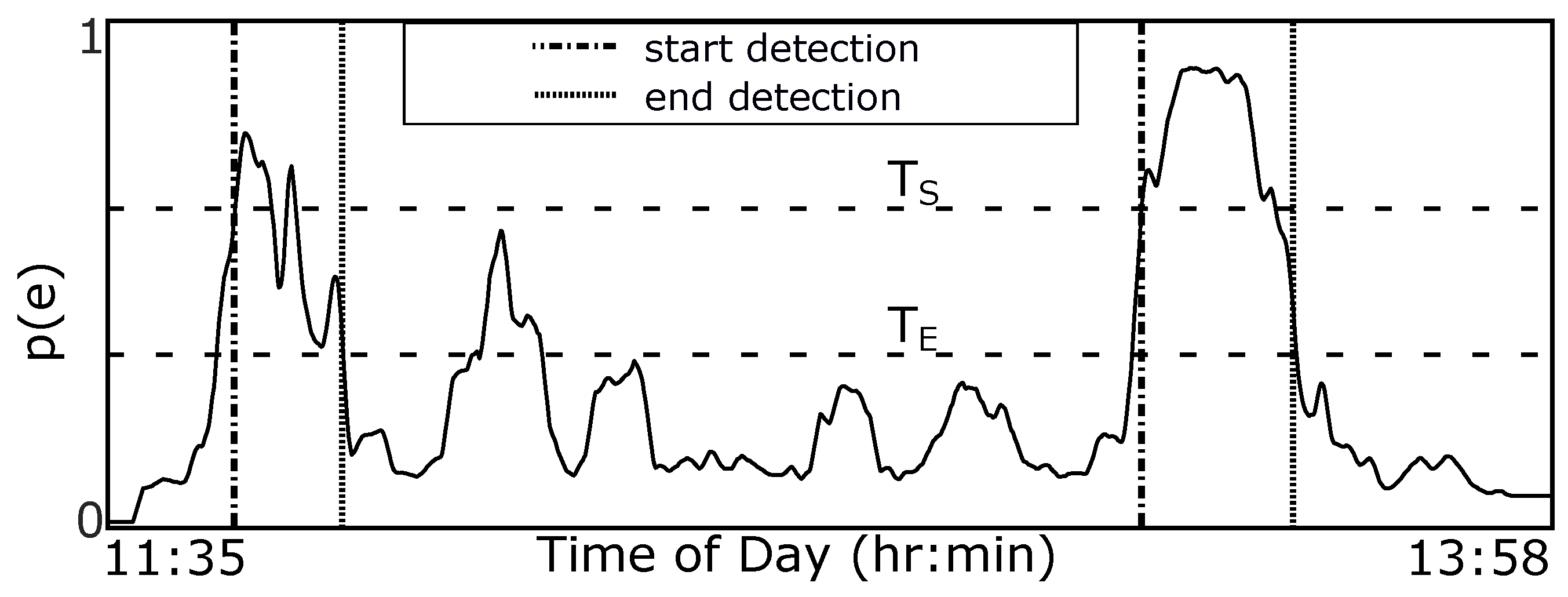
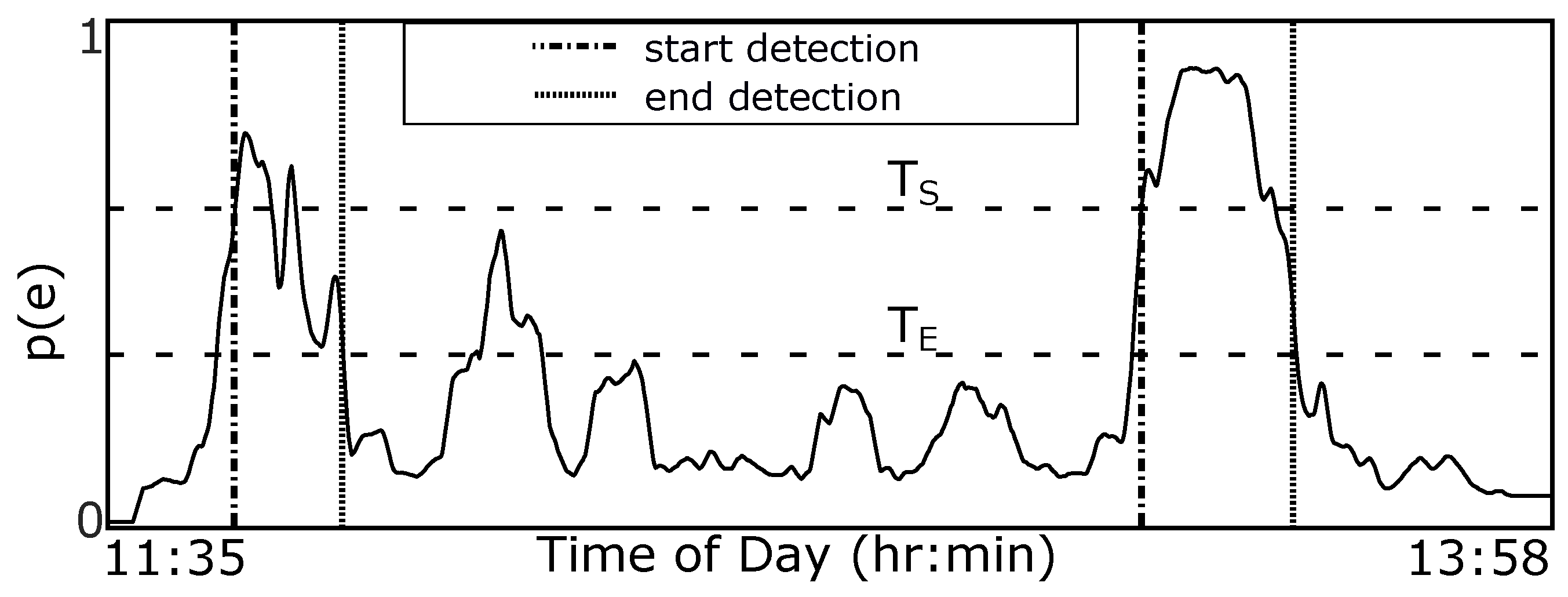
2.4. Eating Episode Detector
| Algorithm 1: Pseudo-code for hysteresis-based detector used to segment eating episodes. |
 |
2.5. Evaluation Metrics
2.5.1. Episode Metrics
2.5.2. Boundary Metrics
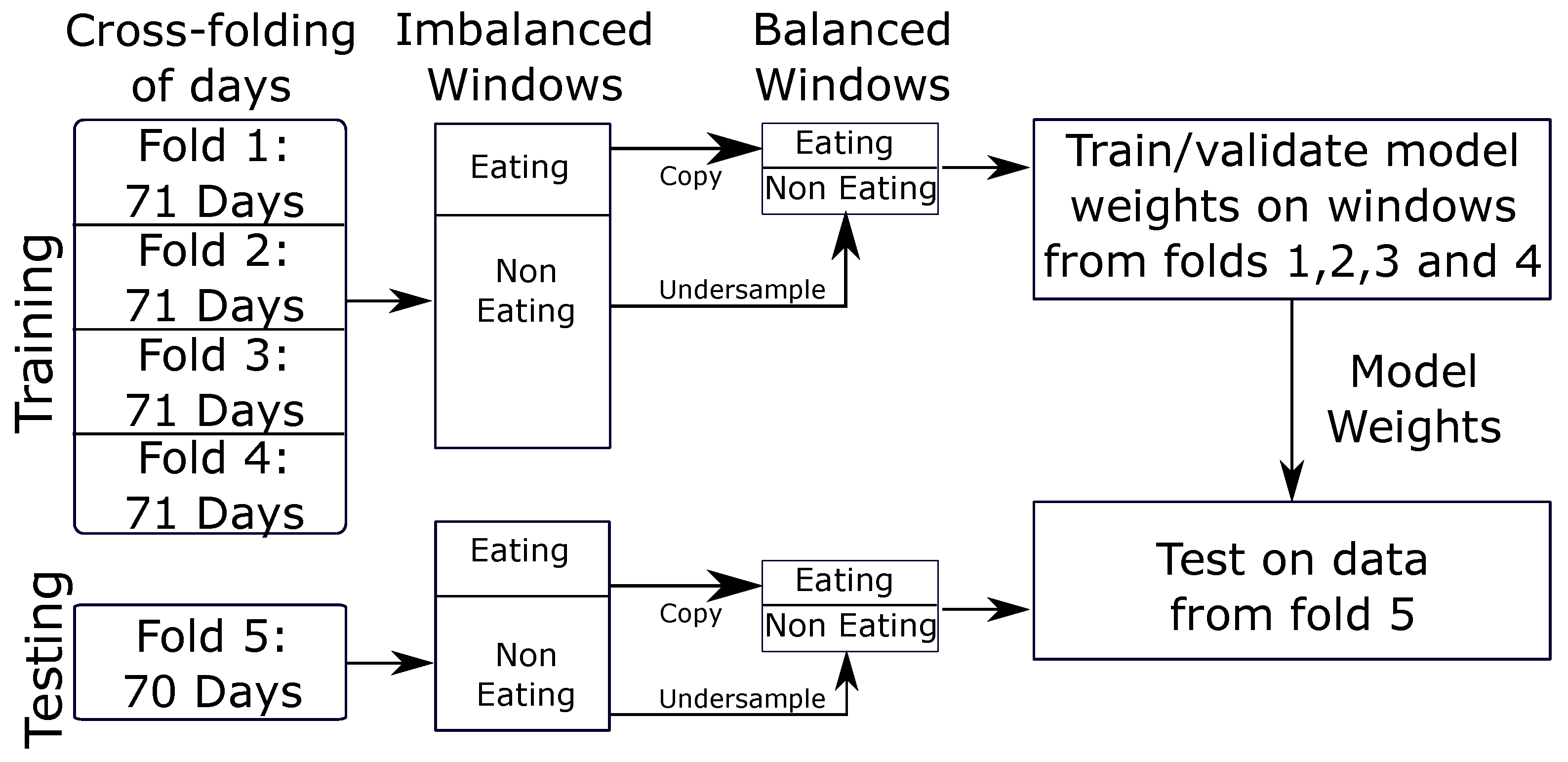
2.6. CNN Training
2.7. CNN Validation
2.8. Hyperparameter Selection
3. Results
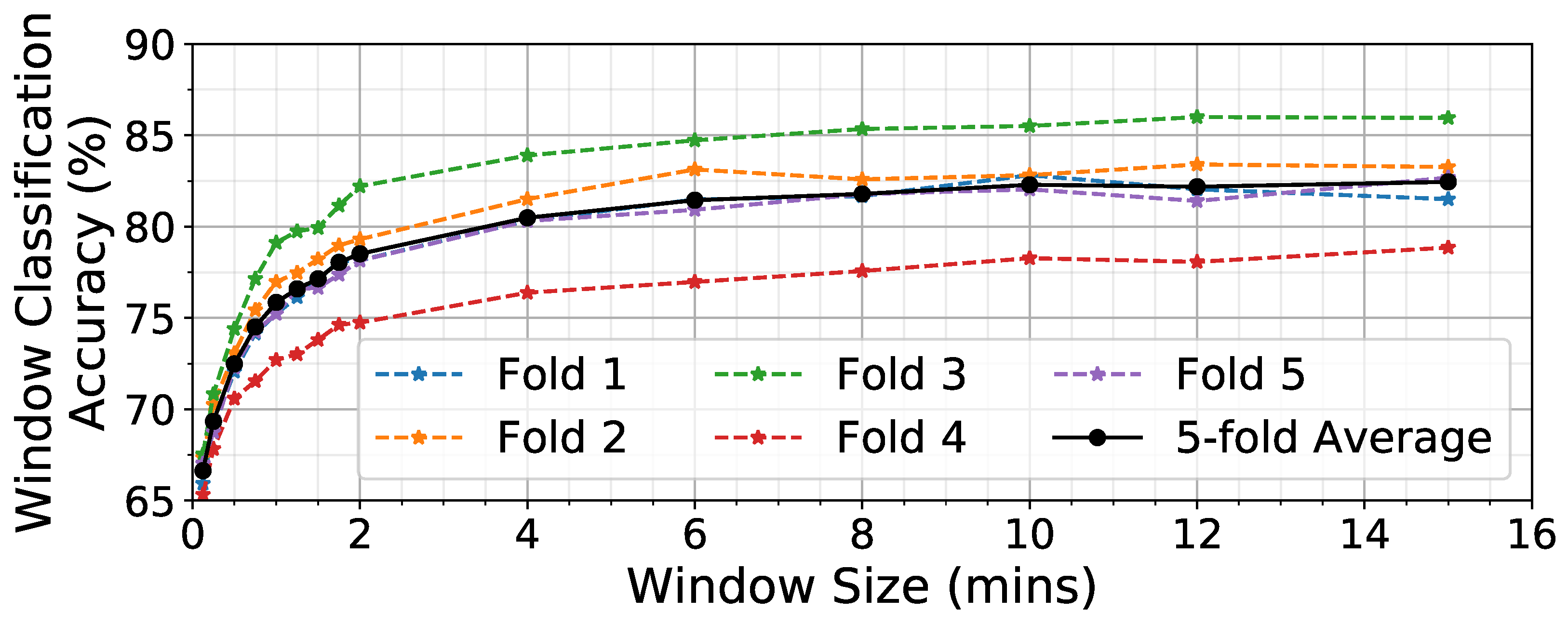
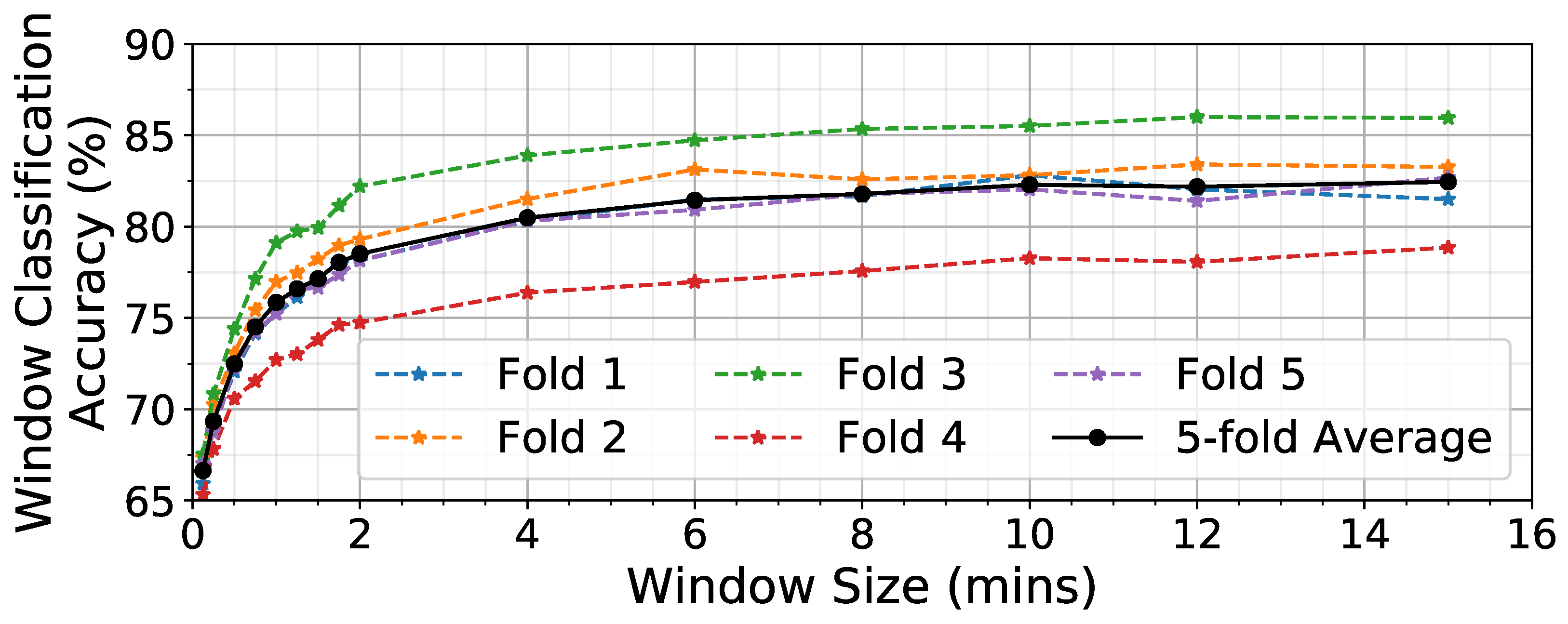
3.1. Effect of Window Size W
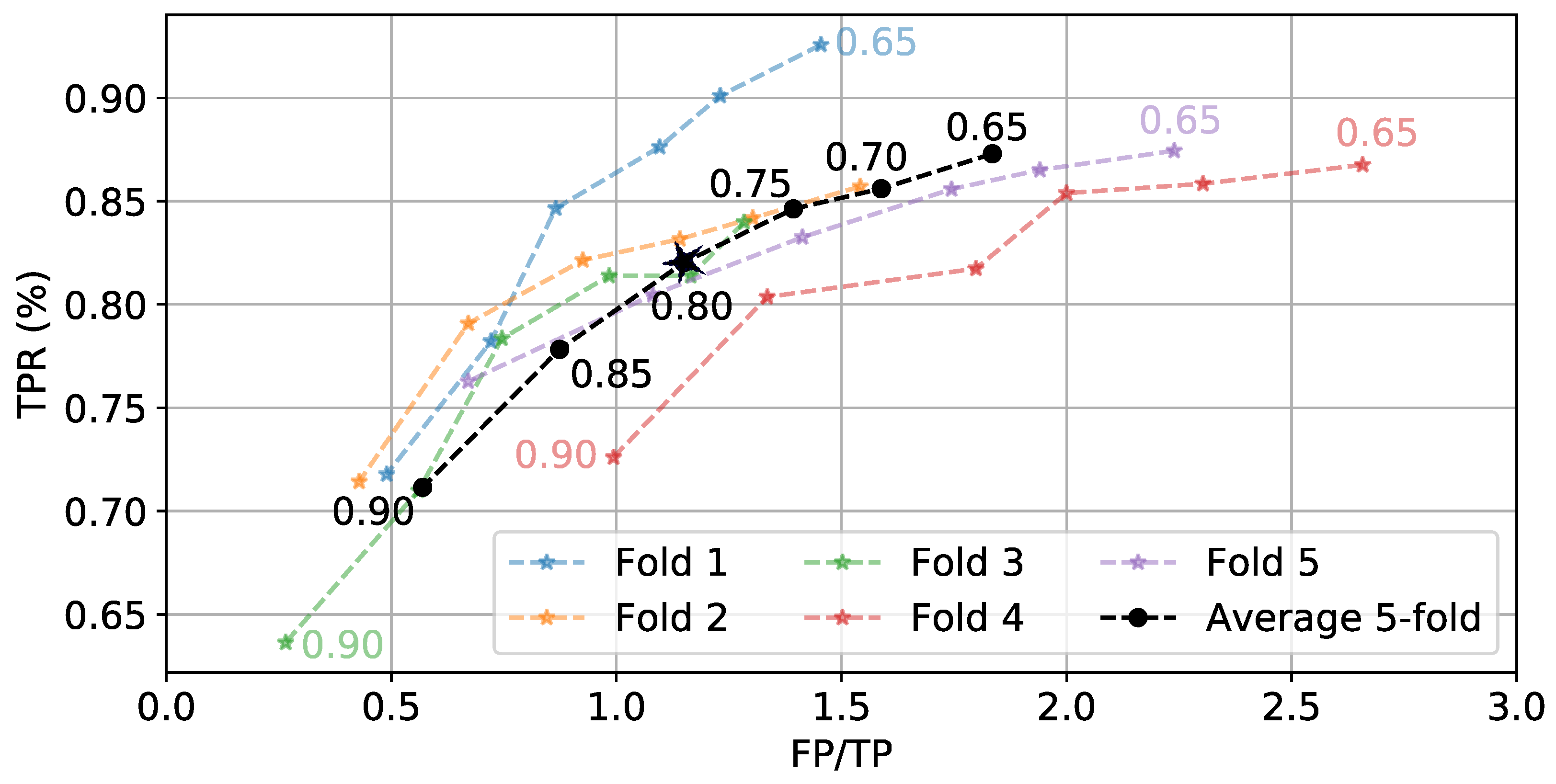
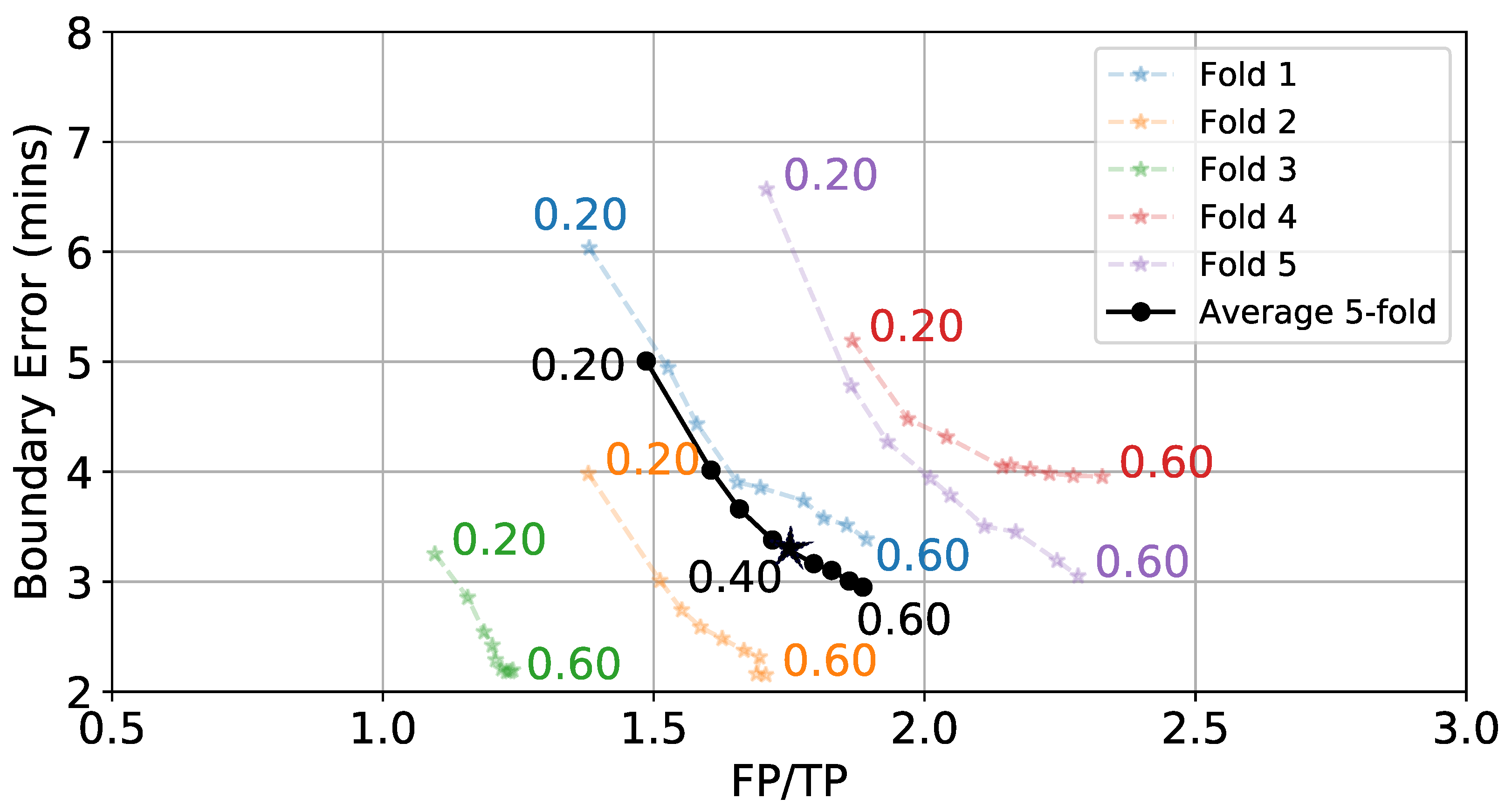
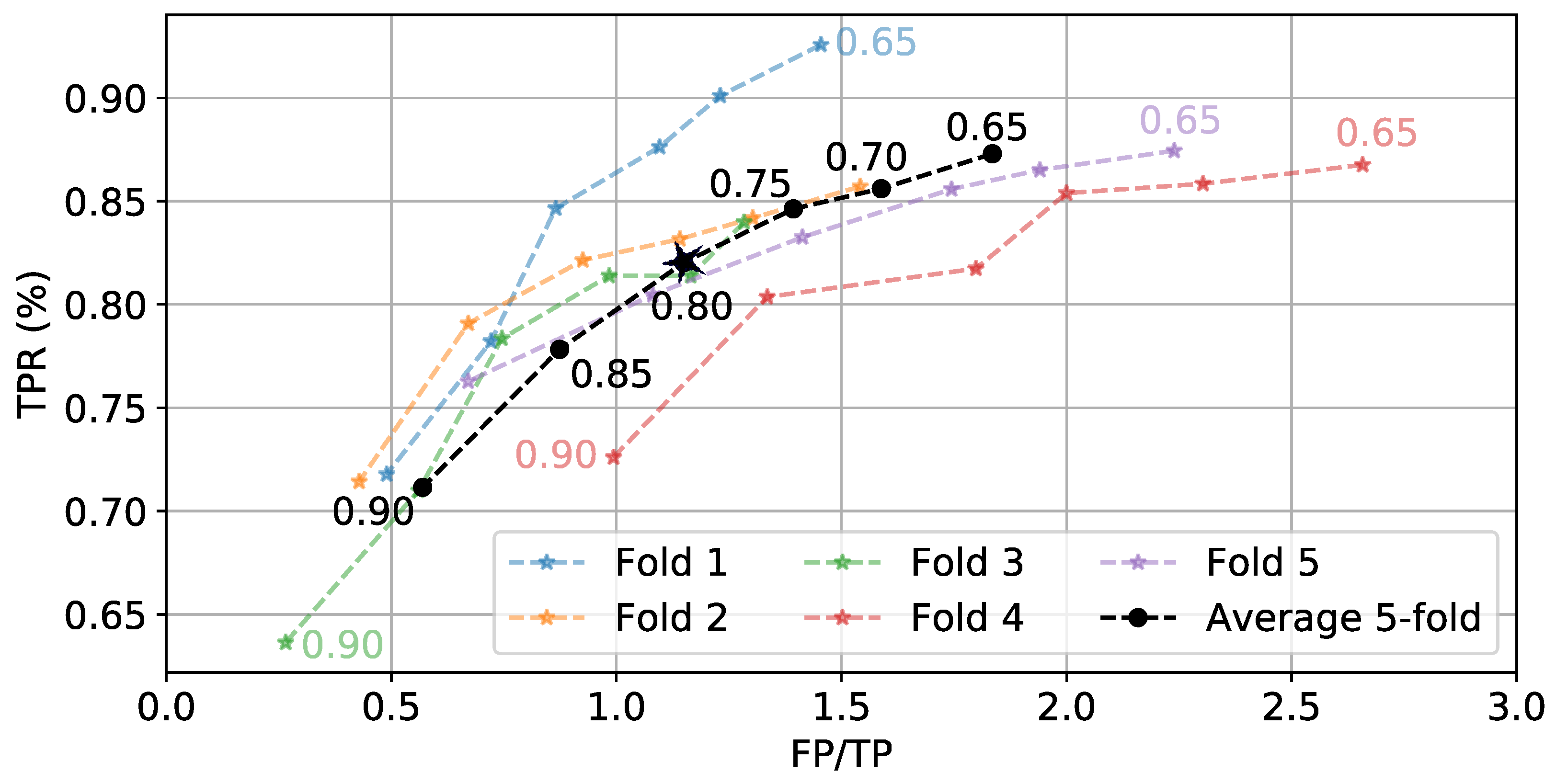
3.2. Effect of and on Evaluation Metrics
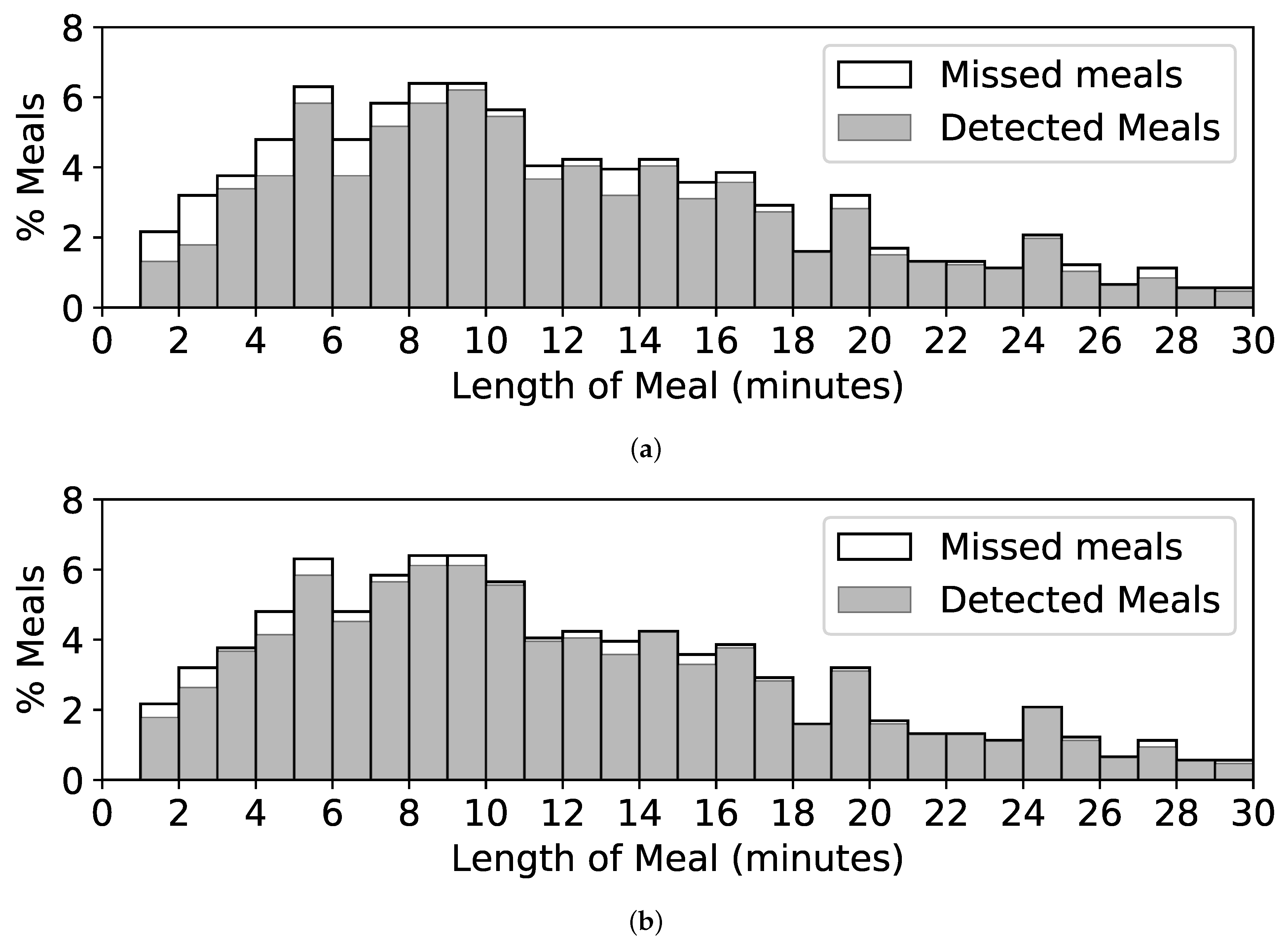
3.3. Eating Activity Detection Performance
3.4. Comparative Results
4. Discussion
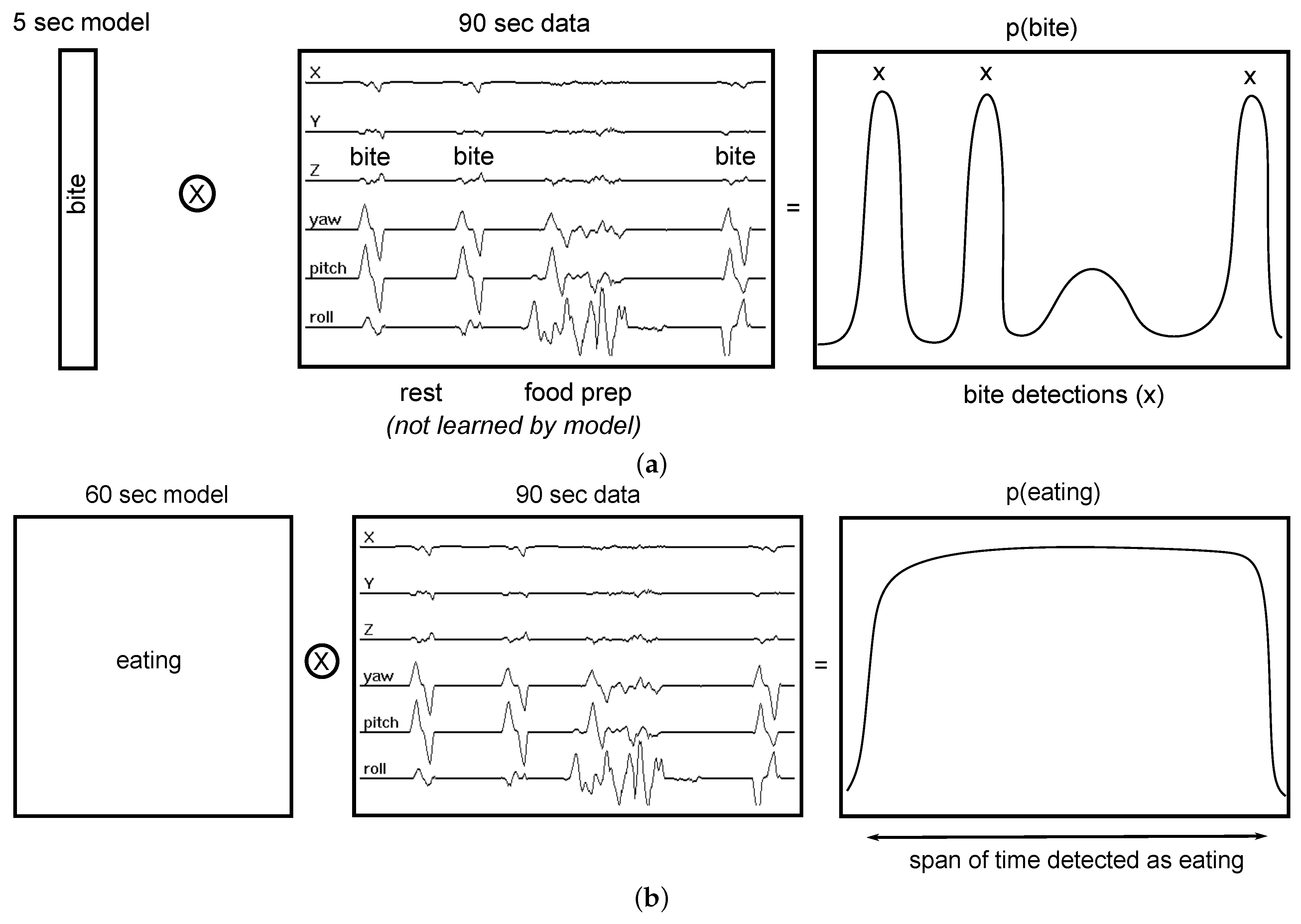
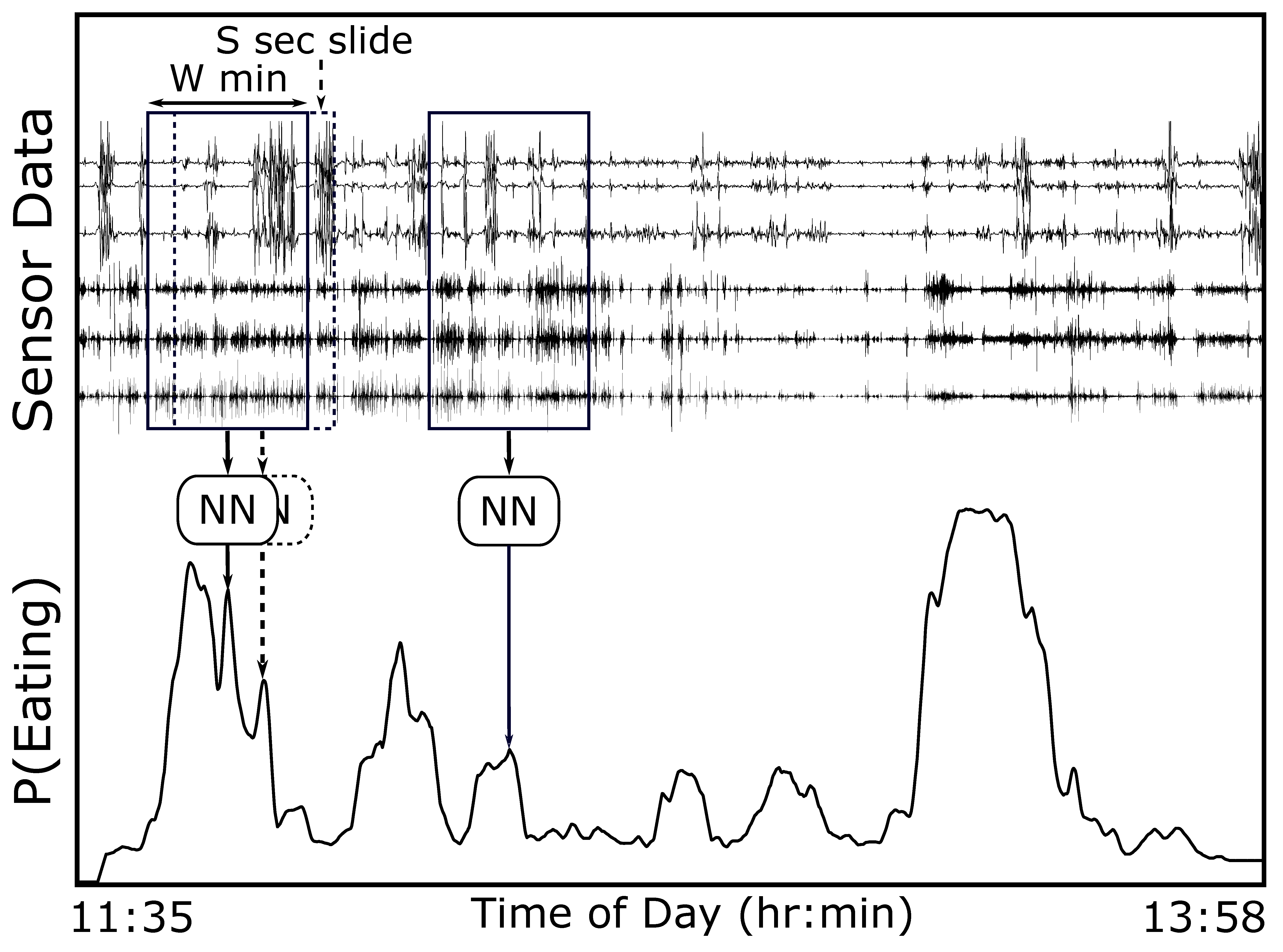
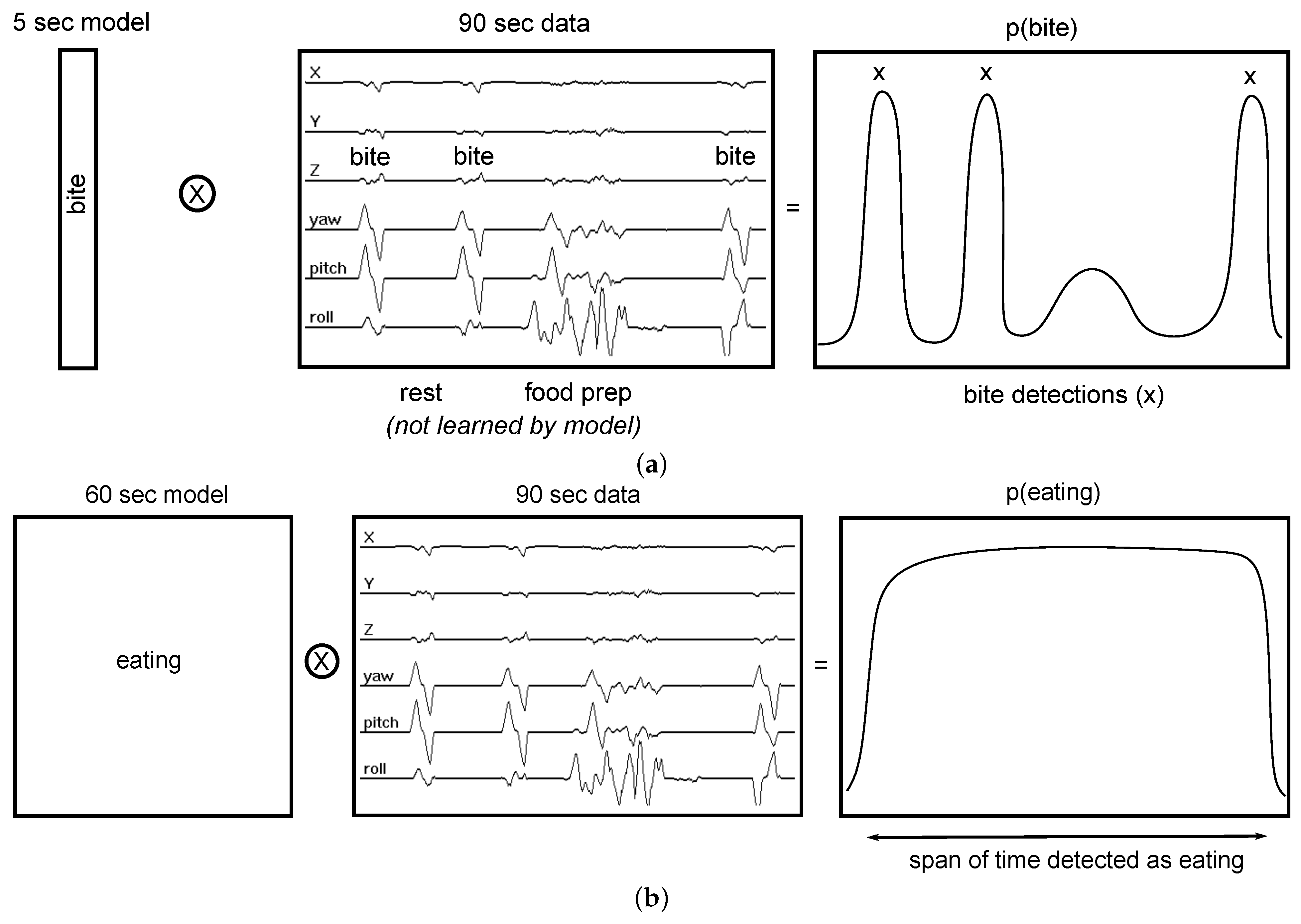
- We show a new method that can detect periods of eating by tracking wrist motion data. We take a top-down approach, analyzing large windows (0.5–15 min) to determine if eating occurred.
- We show evidence that considering longer periods of data to detect eating can improve performance by up to 15%.
- We train and test against the largest available dataset of its kind (10×–100× larger than other datasets), giving us confidence in our results.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Burke, L.E.; Wang, J.; Sevick, M.A. Self-monitoring in weight loss: A systematic review of the literature. J. Am. Diet. Assoc. 2011, 111, 92–102. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Boutelle, K.N.; Kirschenbaum, D.S. Further support for consistent self-monitoring as a vital component of successful weight control. Obes. Res. 1998, 6, 219–224. [Google Scholar] [CrossRef] [PubMed]
- Cordeiro, F.; Epstein, D.A.; Thomaz, E.; Bales, E.; Jagannathan, A.K.; Abowd, G.D.; Fogarty, J. Barriers and negative nudges: Exploring challenges in food journaling. In Proceedings of the 33rd Annual ACM Conference on Human Factors in Computing Systems, Seoul, Korea, 18–23 April 2015; pp. 1159–1162. [Google Scholar]
- Ezzati, M.; Martin, H.; Skjold, S.; Hoorn, S.V.; Murray, C.J. Trends in national and state-level obesity in the USA after correction for self-report bias: Analysis of health surveys. J. R. Soc. Med. 2006, 99, 250–257. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Helander, E.; Kaipainen, K.; Korhonen, I.; Wansink, B. Factors related to sustained use of a free mobile app for dietary self-monitoring with photography and peer feedback: Retrospective cohort study. J. Med. Internet Res. 2014, 16, e109. [Google Scholar] [CrossRef]
- Appelboom, G.; Camacho, E.; Abraham, M.E.; Bruce, S.S.; Dumont, E.L.; Zacharia, B.E.; D’Amico, R.; Slomian, J.; Reginster, J.Y.; Bruyère, O.; et al. Smart Wearable Body Sensors for Patient Self-assessment and Monitoring. Arch. Public Health 2014, 72, 28. [Google Scholar] [CrossRef] [Green Version]
- Vu, T.; Lin, F.; Alshurafa, N.; Xu, W. Wearable food intake monitoring technologies: A comprehensive review. Computers 2017, 6, 4. [Google Scholar] [CrossRef]
- Dong, B.; Biswas, S.; Gernhardt, R.; Schlemminger, J. A mobile food intake monitoring system based on breathing signal analysis. In Proceedings of the 8th International Conference on Body Area Networks, Boston, MA, USA, 30 September–2 October 2013; pp. 165–168. [Google Scholar]
- Alshurafa, N.; Kalantarian, H.; Pourhomayoun, M.; Liu, J.J.; Sarin, S.; Shahbazi, B.; Sarrafzadeh, M. Recognition of nutrition intake using time-frequency decomposition in a wearable necklace using a piezoelectric sensor. IEEE Sens. J. 2015, 15, 3909–3916. [Google Scholar] [CrossRef]
- Zhang, R.; Amft, O. Free-living eating event spotting using EMG-monitoring eyeglasses. In Proceedings of the 2018 IEEE EMBS International Conference on Biomedical & Health Informatics (BHI), Las Vegas, NV, USA, 4–7 March 2018; pp. 128–132. [Google Scholar]
- Dong, Y.; Scisco, J.; Wilson, M.; Muth, E.; Hoover, A. Detecting periods of eating during free-living by tracking wrist motion. IEEE J. Biomed. Health Inform. 2014, 18, 1253–1260. [Google Scholar] [CrossRef]
- Sazonov, E.; Schuckers, S.; Lopez-Meyer, P.; Makeyev, O.; Sazonova, N.; Melanson, E.L.; Neuman, M. Non-invasive monitoring of chewing and swallowing for objective quantification of ingestive behavior. Physiol. Meas. 2008, 29, 525. [Google Scholar] [CrossRef] [Green Version]
- Amft, O.; Tröster, G. Recognition of dietary activity events using on-body sensors. Artif. Intell. Med. 2008, 42, 121–136. [Google Scholar] [CrossRef] [Green Version]
- Bedri, A.; Li, R.; Haynes, M.; Kosaraju, R.P.; Grover, I.; Prioleau, T.; Beh, M.Y.; Goel, M.; Starner, T.; Abowd, G. EarBit: Using wearable sensors to detect eating episodes in unconstrained environments. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2017, 1, 37. [Google Scholar] [CrossRef]
- Chun, K.S.; Bhattacharya, S.; Thomaz, E. Detecting Eating Episodes by Tracking Jawbone Movements with a Non-Contact Wearable Sensor. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2018, 2, 4. [Google Scholar] [CrossRef]
- Zhang, S.; Zhao, Y.; Nguyen, D.T.; Xu, R.; Sen, S.; Hester, J.; Alshurafa, N. NeckSense: A Multi-Sensor Necklace for Detecting Eating Activities in Free-Living Conditions. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2020, 37, 1–26. [Google Scholar] [CrossRef] [PubMed]
- Bi, S.; Wang, T.; Tobias, N.; Nordrum, J.; Wang, S.; Halvorsen, G.; Sen, S.; Peterson, R.; Odame, K.; Caine, K.; et al. Auracle: Detecting eating episodes with an ear-mounted sensor. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2018, 2, 92. [Google Scholar] [CrossRef]
- Farooq, M.; Sazonov, E. A novel wearable device for food intake and physical activity recognition. Sensors 2016, 16, 1067. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Doulah, A.; Ghosh, T.; Hossain, D.; Imtiaz, M.H.; Sazonov, E. Automatic Ingestion Monitor Version 2—A Novel Wearable Device for Automatic Food Intake Detection and Passive Capture of Food Images. IEEE J. Biomed. Health Inform. 2020, 25, 568–576. [Google Scholar] [CrossRef]
- Muth, E.R.; Hoover, A. Designing Mobile Health Technologies for Self-Monitoring: The Bite Counter as a Case Study. In Mobile Health; Springer: Berlin/Heidelberg, Germany, 2017; pp. 101–120. [Google Scholar]
- Schiboni, G.; Amft, O. Sparse natural gesture spotting in free living to monitor drinking with wrist-worn inertial sensors. In Proceedings of the 2018 ACM International Symposium on Wearable Computers, Singapore, 8–12 October 2018; pp. 140–147. [Google Scholar]
- Kyritsis, K.; Diou, C.; Delopoulos, A. Modeling Wrist Micromovements to Measure In-Meal Eating Behavior from Inertial Sensor Data. IEEE J. Biomed. Health Inform. 2019, 23, 2325–2334. [Google Scholar] [CrossRef] [Green Version]
- Kyritsis, K.; Diou, C.; Delopoulos, A. A Data Driven End-to-end Approach for In-the-wild Monitoring of Eating Behavior Using Smartwatches. IEEE J. Biomed. Health Inform. 2020, 25, 22–34. [Google Scholar] [CrossRef]
- Kalantarian, H.; Sarrafzadeh, M. Audio-based detection and evaluation of eating behavior using the smartwatch platform. Comput. Biol. Med. 2015, 65, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Kalantarian, H.; Alshurafa, N.; Sarrafzadeh, M. A survey of diet monitoring technology. IEEE Pervasive Comput. 2017, 16, 57–65. [Google Scholar] [CrossRef]
- Wang, G. A perspective on deep imaging. IEEE Access 2016, 4, 8914–8924. [Google Scholar] [CrossRef]
- Esteva, A.; Robicquet, A.; Ramsundar, B.; Kuleshov, V.; DePristo, M.; Chou, K.; Cui, C.; Corrado, G.; Thrun, S.; Dean, J. A guide to deep learning in healthcare. Nat. Med. 2019, 25, 24–29. [Google Scholar] [CrossRef] [PubMed]
- Gil-Martín, M.; San-Segundo, R.; Fernández-Martínez, F.; Ferreiros-López, J. Time Analysis in Human Activity Recognition. Neural Process. Lett. 2021, 53, 4507–4525. [Google Scholar] [CrossRef]
- Heydarian, H.; Adam, M.; Burrows, T.; Collins, C.; Rollo, M.E. Assessing eating behaviour using upper limb mounted motion sensors: A systematic review. Nutrients 2019, 11, 1168. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fontana, J.M.; Farooq, M.; Sazonov, E. Automatic ingestion monitor: A novel wearable device for monitoring of ingestive behavior. IEEE Trans. Biomed. Eng. 2014, 61, 1772–1779. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gao, Y.; Zhang, N.; Wang, H.; Ding, X.; Ye, X.; Chen, G.; Cao, Y. iHear food: Eating detection using commodity bluetooth headsets. In Proceedings of the 2016 IEEE First International Conference on Connected Health: Applications, Systems and Engineering Technologies (CHASE), Washington, DC, USA, 27–29 June 2016; pp. 163–172. [Google Scholar]
- Mirtchouk, M.; Lustig, D.; Smith, A.; Ching, I.; Zheng, M.; Kleinberg, S. Recognizing eating from body-worn sensors: Combining free-living and laboratory data. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2017, 1, 85. [Google Scholar] [CrossRef] [Green Version]
- Ramos-Garcia, R.I.; Muth, E.R.; Gowdy, J.N.; Hoover, A.W. Improving the recognition of eating gestures using intergesture sequential dependencies. IEEE J. Biomed. Health Inform. 2015, 19, 825–831. [Google Scholar] [CrossRef]
- Shen, Y.; Salley, J.; Muth, E.; Hoover, A. Assessing the accuracy of a wrist motion tracking method for counting bites across demographic and food variables. IEEE J. Biomed. Health Inform. 2017, 21, 599–606. [Google Scholar] [CrossRef] [Green Version]
- Sharma, S.; Jasper, P.; Muth, E.; Hoover, A. The impact of walking and resting on wrist motion for automated detection of meals. ACM Trans. Comput. Healthc. 2020, 1, 1–19. [Google Scholar] [CrossRef]
- Davies, E.R. Computer and Machine Vision: Theory, Algorithms, Practicalities; Academic Press: Cambridge, MA, USA, 2012. [Google Scholar]
- Nair, V.; Hinton, G.E. Rectified Linear Units Improve Restricted Boltzmann Machines. 2010. Available online: https://www.cs.toronto.edu/~fritz/absps/reluICML.pdf (accessed on 10 December 2021).
- Han, J.; Moraga, C. The influence of the sigmoid function parameters on the speed of backpropagation learning. In Proceedings of the International Workshop on Artificial Neural Networks, Torremolinos, Spain, 7–9 June 1995; pp. 195–201. [Google Scholar]
- Park, M.Y.; Hastie, T. L1-regularization path algorithm for generalized linear models. J. R. Stat. Soc. Ser. 2007, 69, 659–677. [Google Scholar] [CrossRef]
- Chollet, F. Keras. 2015. Available online: https://github.com/keras-team/keras (accessed on 10 December 2021).
- Nielsen, M.A. Neural Networks and Deep Learning; Determination Press: San Francisco, CA, USA, 2015; Volume 2018. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Dong, Y. Tracking Wrist Motion to Detect and Measure the Eating Intake of Free-Living Humans; Clemson University: Clemson, SC, USA, 2012. [Google Scholar]
- Bell, B.M.; Alam, R.; Alshurafa, N.; Thomaz, E.; Mondol, A.S.; de la Haye, K.; Stankovic, J.A.; Lach, J.; Spruijt-Metz, D. Automatic, wearable-based, in-field eating detection approaches for public health research: A scoping review. NPJ Digit. Med. 2020, 3, 38. [Google Scholar]
- Sharma, S.; Hoover, A. The Challenge of Metrics in Automated Dietary Monitoring as Analysis Transitions from Small Data to Big Data. In Proceedings of the 2020 IEEE International Conference on Bioinformatics and Biomedicine (BIBM), Seoul, Korea, 16–19 December 2020; pp. 2647–2653. [Google Scholar]
- Breznitz, S. Cry Wolf: The Psychology of False Alarms; Psychology Press: Hove, UK, 2013. [Google Scholar]
- Xiao, Y.; Seagull, F.J.; Nieves-Khouw, F.; Barczak, N.; Perkins, S. Organizational-historical analysis of the “failure to respond to alarm” problems. IEEE Trans. Syst. Man Cybern. Part A Syst. Humans 2004, 34, 772–778. [Google Scholar] [CrossRef]
- Scikit Learn. Scikit Learn Kfold Model Selection Documentation. 2019. Available online: https://scikit-learn.org/stable/modules/generated/sklearn.model_selection.KFold.html (accessed on 12 December 2021).
- Brownlee, J. Deep Learning with Python: Develop Deep Learning Models on Theano and Tensor Flow Using Keras; Machine Learning Mastery: San Juan, PR, USA, 2016; pp. 43–47. [Google Scholar]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Bergstra, J.; Bengio, Y. Random search for hyper-parameter optimization. J. Mach. Learn. Res. 2012, 13, 281–305. [Google Scholar]
- Thomaz, E.; Essa, I.; Abowd, G.D. A practical approach for recognizing eating moments with wrist-mounted inertial sensing. In Proceedings of the 2015 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Osaka, Japan, 7–11 September 2015; pp. 1029–1040. [Google Scholar]
- Zhang, S.; Alharbi, R.; Nicholson, M.; Alshurafa, N. When generalized eating detection machine learning models fail in the field. In Proceedings of the 2017 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Maui, HI, USA, 11–15 September 2017; pp. 613–622. [Google Scholar]
- Junker, H.; Amft, O.; Lukowicz, P.; Tröster, G. Gesture spotting with body-worn inertial sensors to detect user activities. Pattern Recognit. 2008, 41, 2010–2024. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Meals | Total | Mean | Std | Median |
|---|---|---|---|---|
| 1063 | 250 h | 14 min | 11 min | 11 min |
| Work | Dataset | Subjects | Meals | Approach | Window Size | TPR (%) | FP/TP |
|---|---|---|---|---|---|---|---|
| This Work | CAD [35] | 351 | 1063 | Top-down | 6 min | 89 | 1.7 |
| Sharma, 2020 [35] | CAD [35] | 351 | 1063 | Top-down | varying | 89 | 5.2 |
| Dong, 2014 [11] | iPhone [11] | 43 | 116 | Top-down | varying | 86 | 3.8 |
| Kyritsis, 2020 [23] | ACE-E+FL [32] | 11 | 86 | Bottom-up | 5 s | - | - |
| Mirtchouk, 2017 [32] | ACE-E [32] | 6 | 55 | Bottom-up | 5 s | 87 | - |
| Mirtchouk, 2017 [32] | ACE-E/FL [32] | 5 | 31 | Bottom-up | 5 s | 94 | - |
| Kyritsis 2020 [23] | FreeFIC (FF) [23] | 6 | 17 | 5 s | - | - | |
| Kyritsis, 2020 [23] | FF held-out (FFHO) [23] | 6 | 6 | Bottom-up | 5 s | - | - |
| Thomaz, 2015 [52] | Wild-7 [52] | 7 | - | Bottom-up | 6 s | - | - |
| Thomaz, 2015 [52] | Wild-Long [52] | 1 | - | Bottom-up | 6 s | - | - |
| Work | Dataset | Total Hours | Eating Hours | Precision (%) | Recall (%) | TNR (%) | F1 Score (%) | ACCW (%) |
|---|---|---|---|---|---|---|---|---|
| ours | CAD [35] | 4680 | 250 | 36 | 69 | 93 | 48 | 80 |
| [35] | CAD [35] | 4680 | 250 | 14 | 76 | 73 | 23 | 77 |
| [11] | iPhone [11] | 449 | 22 | - | 81 | 82 | - | 81 |
| [23] | ACE-E+FL [32] | 250 | 20 | 46 | 63 | 63 | 53 | 79 |
| [32] | ACE-E [32] | 144 | 12 | 25 | 83 | - | 38 | 79 |
| [32] | ACE-E/FL [32] | 254 | 20 | 31 | 87 | - | - | 85 |
| [23] | FreeFIC [23] | 77 | 5 | 88 | 92 | 99 | 90 | 96 |
| [23] | FFHO [23] | 35 | 2 | 86 | 94 | 99 | 90 | 96 |
| [52] | Wild-7 [52] | 32 | 2 | 67 | 89 | - | 76 | - |
| [52] | Wild-Long [52] | 422 | 16 | 65 | 79 | - | 71 | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sharma, S.; Hoover, A. Top-Down Detection of Eating Episodes by Analyzing Large Windows of Wrist Motion Using a Convolutional Neural Network. Bioengineering 2022, 9, 70. https://doi.org/10.3390/bioengineering9020070
Sharma S, Hoover A. Top-Down Detection of Eating Episodes by Analyzing Large Windows of Wrist Motion Using a Convolutional Neural Network. Bioengineering. 2022; 9(2):70. https://doi.org/10.3390/bioengineering9020070
Chicago/Turabian StyleSharma, Surya, and Adam Hoover. 2022. "Top-Down Detection of Eating Episodes by Analyzing Large Windows of Wrist Motion Using a Convolutional Neural Network" Bioengineering 9, no. 2: 70. https://doi.org/10.3390/bioengineering9020070
APA StyleSharma, S., & Hoover, A. (2022). Top-Down Detection of Eating Episodes by Analyzing Large Windows of Wrist Motion Using a Convolutional Neural Network. Bioengineering, 9(2), 70. https://doi.org/10.3390/bioengineering9020070