
A New Medical Analytical Framework for Automated Detection of MRI Brain Tumor Using Evolutionary Quantum Inspired Level Set Technique



Abstract
1. Introduction
1.1. Research Motivation
1.2. Research Contribution and Novelty
2. Related Work
The Need to Extend the Related Work
3. The Proposed Evolutionary Quantum Brain Tumor Detection Method
3.1. Step 1 Preprocessing Phase
3.2. Step 2 Quantum Dragonfly-Based Clustering Phase
3.2.1. Initial DA’ Food Sources Extraction Using K-Mean Algorithm
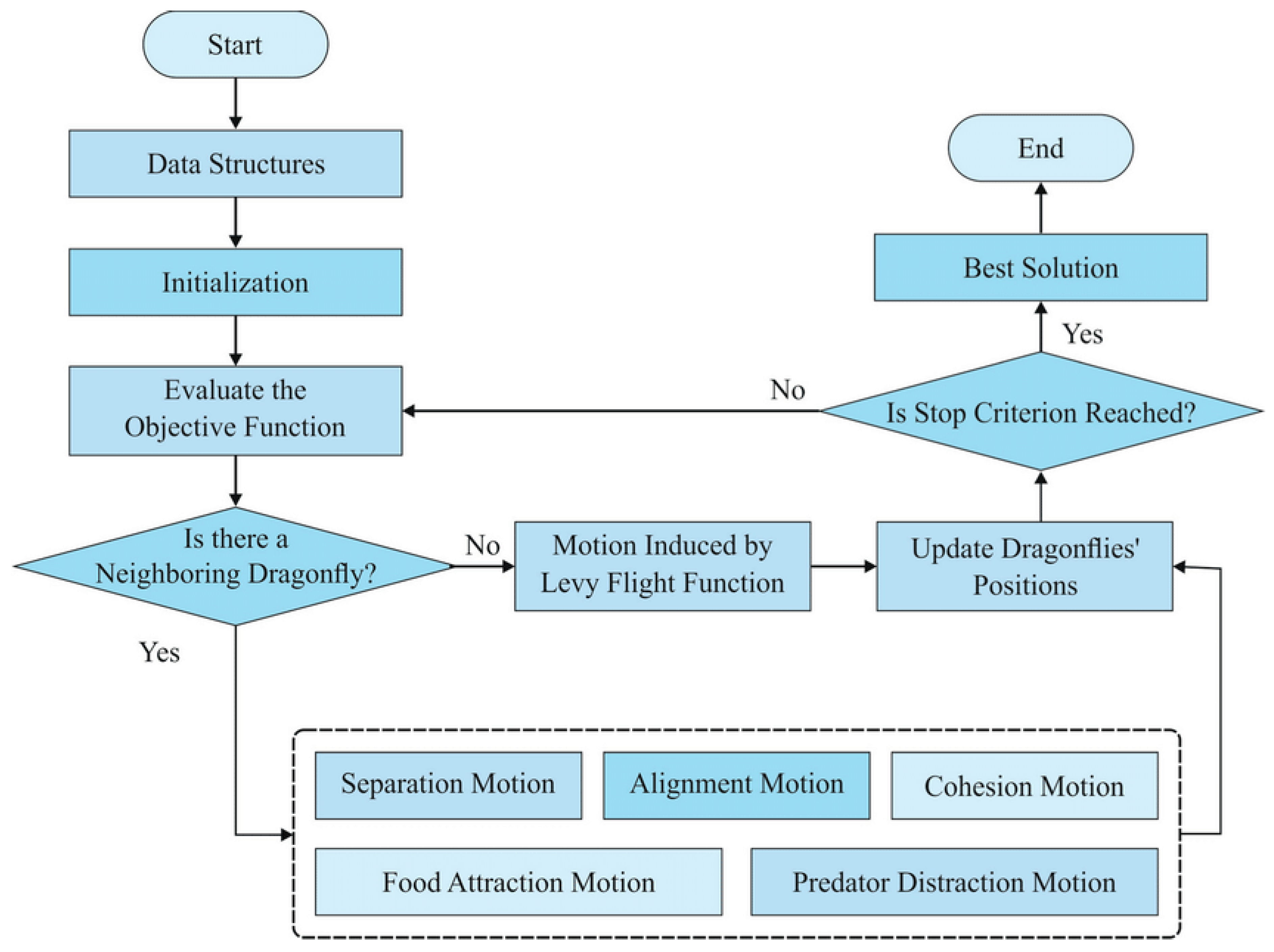
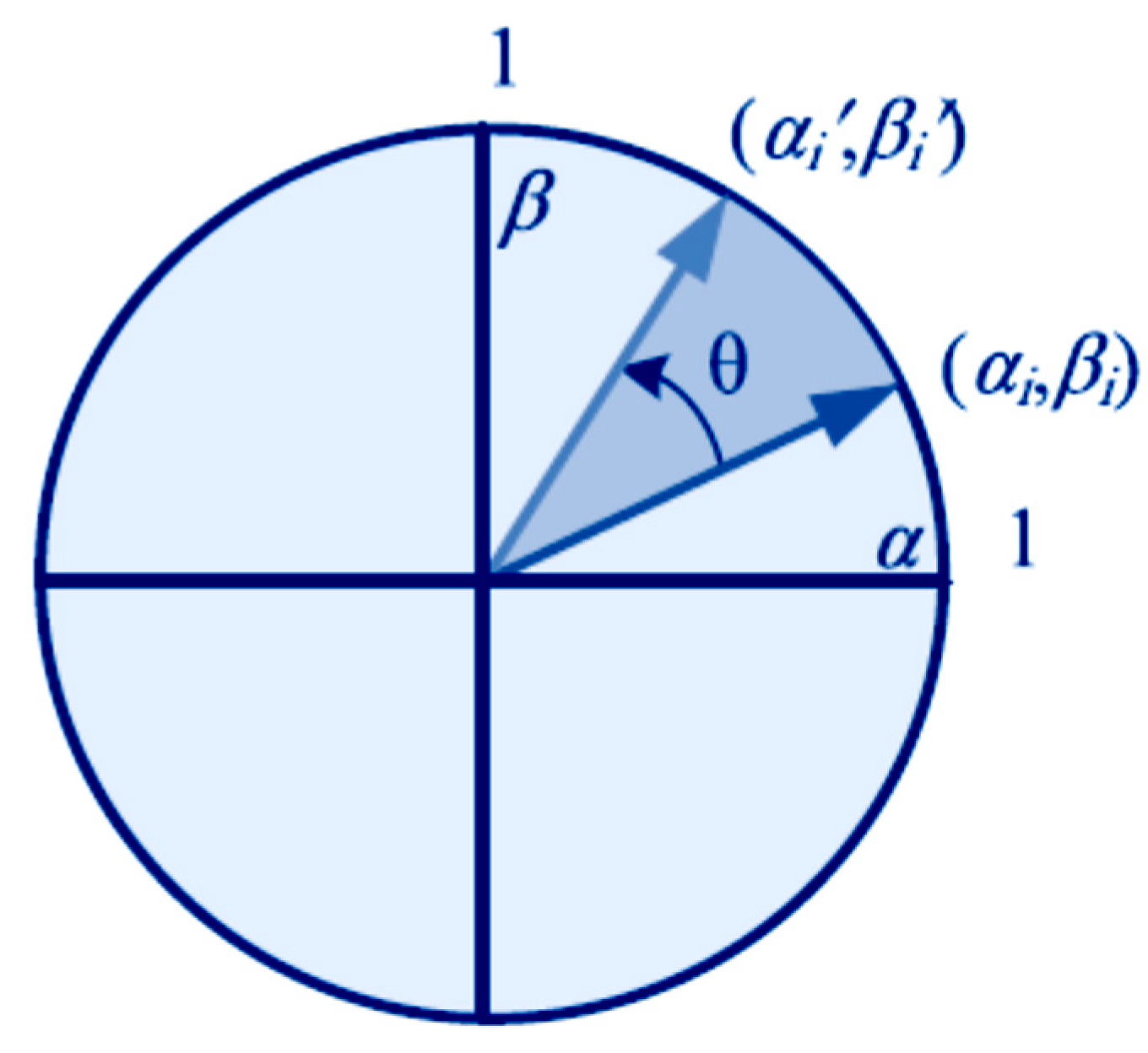
3.2.2. Determine Initial Contour Points Using Quantum Dragonfly Algorithm
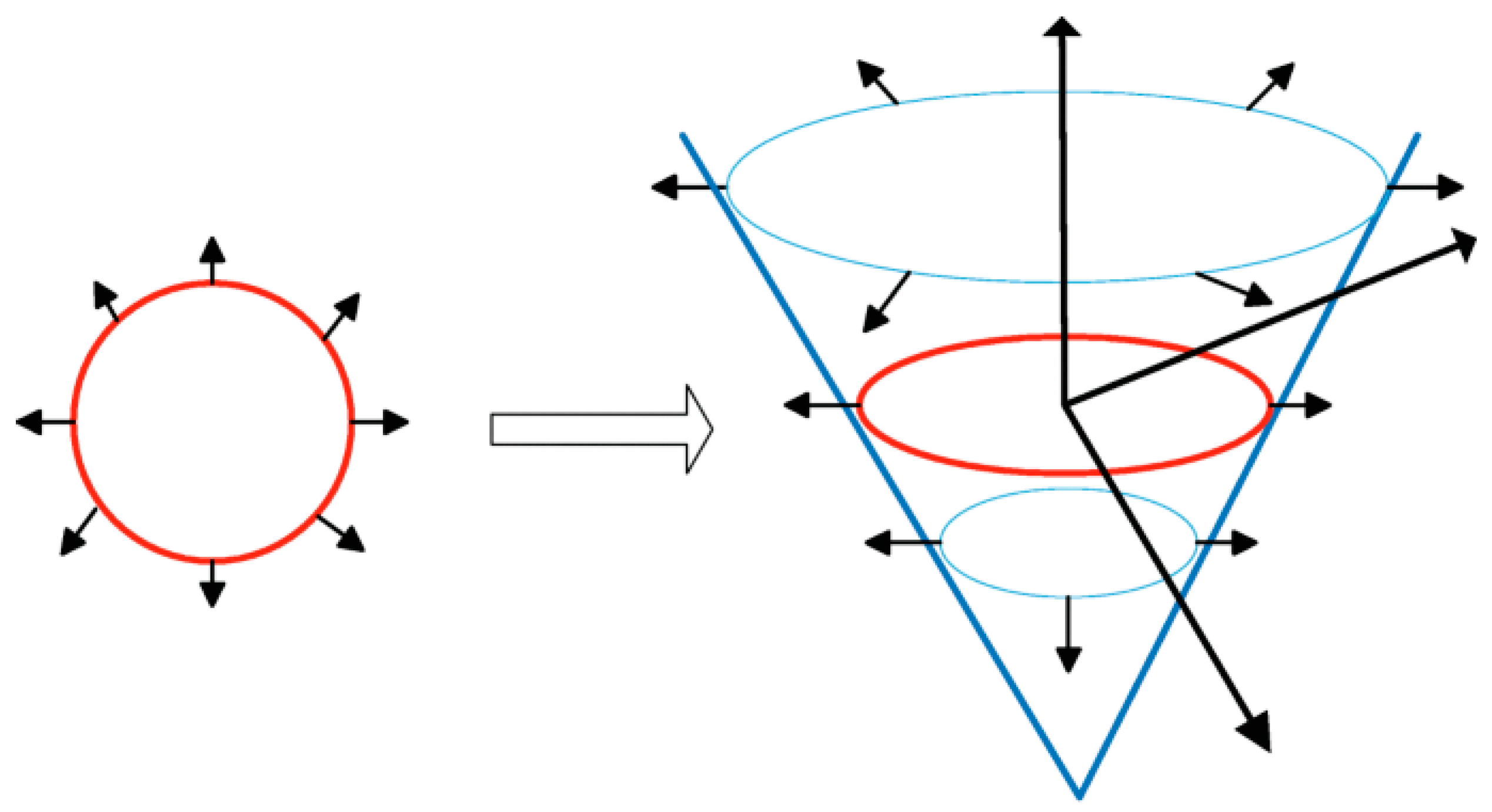
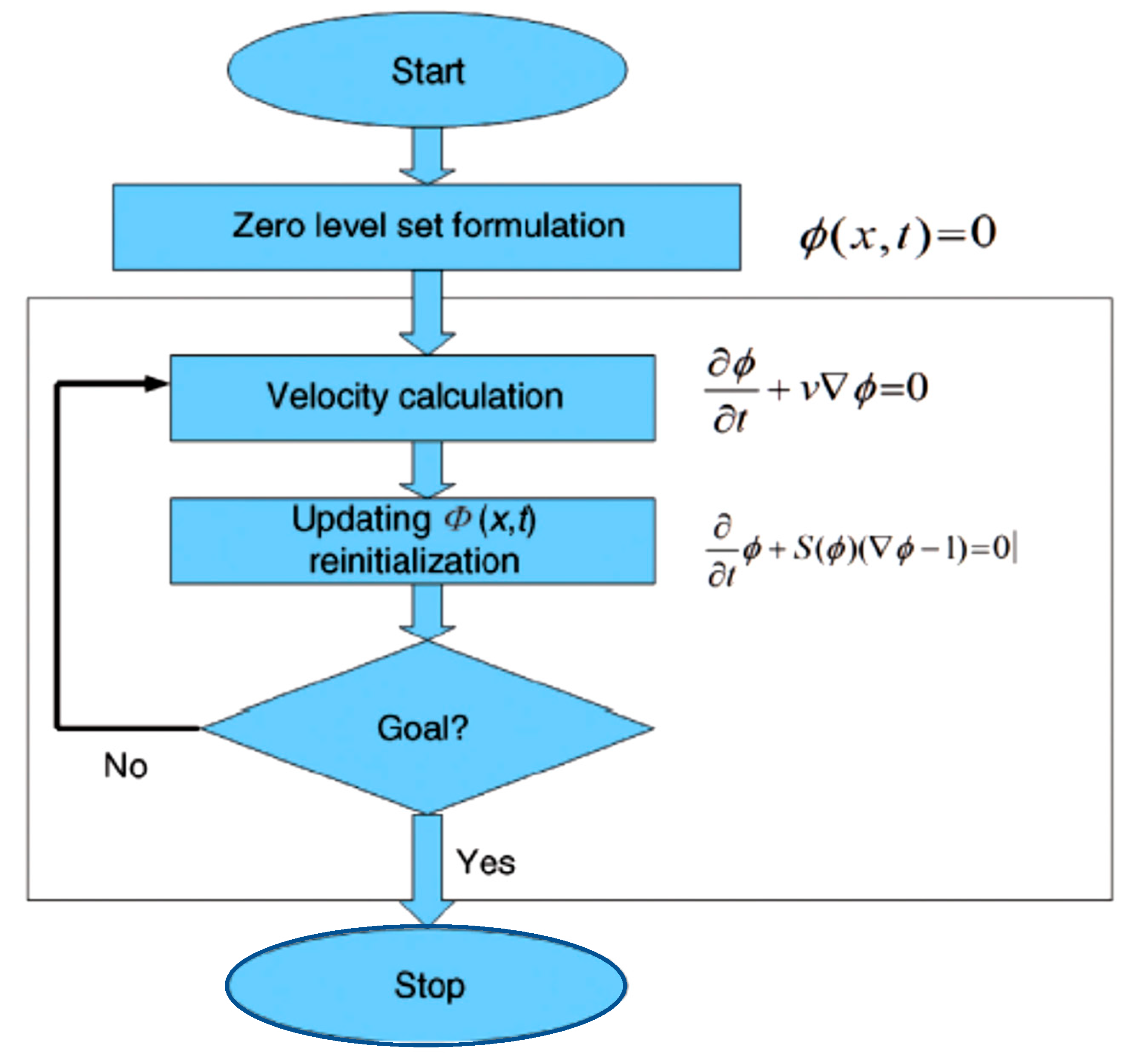
3.3. Step 3 Level Set Segmentation
4. Experimental Results
Convergence Issue of the Proposed Model
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Amin, J.; Sharif, M.; Haldorai, A.; Yasmin, M.; Nayak, R. Brain tumor detection and classification using machine learning: A comprehensive survey. Complex Intell. Syst. 2022, 8, 3161–3183. [Google Scholar] [CrossRef]
- Biratu, E.; Schwenker, F.; Ayano, Y.; Debelee, T. A survey of brain tumor segmentation and classification algorithms. J. Imaging 2021, 7, 179. [Google Scholar] [CrossRef] [PubMed]
- Padmapriya, T.; Sriramakrishnan, P.; Kalaiselvi, T.; Somasundaram, K. Advancements of MRI-based brain tumor segmentation from traditional to recent trends: A review. Curr. Med. Imaging 2022, 18, 1261–1275. [Google Scholar] [PubMed]
- Wang, S.; Jiang, Z.; Yang, H.; Li, X.; Yang, Z. MRI-Based Medical Image Recognition: Identification and Diagnosis of LDH. Comput. Intell. Neurosci. 2022, 2022, 5207178. [Google Scholar] [CrossRef] [PubMed]
- Müller, D.; Soto-Rey, I.; Kramer, F. Towards a guideline for evaluation metrics in medical image segmentation. BMC Res. Notes 2022, 15, 210. [Google Scholar] [CrossRef] [PubMed]
- Qureshi, I.; Yan, J.; Abbas, Q.; Shaheed, K.; Riaz, A.; Wahid, A.; Khan, M.; Szczuko, P. Medical image segmentation using deep semantic-based methods: A review of techniques, applications and emerging trends. Inf. Fusion 2022, 90, 316–352. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhang, Y.; Lin, X.; Dong, J.; Cheng, T.; Liang, J. SwinBTS: A method for 3D multimodal brain tumor segmentation using swin transformer. Brain Sci. 2022, 12, 797. [Google Scholar] [CrossRef]
- Khosravanian, A.; Rahmanimanesh, M.; Keshavarzi, P.; Mozaffari, S.; Kazemi, K. Level set method for automated 3D brain tumor segmentation using symmetry analysis and kernel induced fuzzy clustering. Multimed. Tools Appl. 2022, 81, 21719–21740. [Google Scholar] [CrossRef]
- Khosravanian, A.; Rahmanimanesh, M.; Keshavarzi, P.; Mozaffari, S. Fast level set method for glioma brain tumor segmentation based on Superpixel fuzzy clustering and lattice Boltzmann method. Comput. Methods Programs Biomed. 2021, 198, 105809. [Google Scholar] [CrossRef]
- Lei, X.; Yu, X.; Chi, J.; Wang, Y.; Zhang, J.; Wu, C. Brain tumor segmentation in MR images using a sparse constrained level set algorithm. Expert Syst. Appl. 2021, 168, 114262. [Google Scholar] [CrossRef]
- Zhao, L.; Li, Q.; Wang, C.; Liao, Y. 3D brain tumor image segmentation integrating cascaded anisotropic fully convolutional neural network and hybrid level set method. J. Imaging Sci. Technol. 2020, 64, 040411. [Google Scholar] [CrossRef]
- Radha, R.; Gopalakrishnan, R. A medical analytical system using intelligent fuzzy level set brain image segmentation based on improved quantum particle swarm optimization. Microprocess. Microsyst. 2020, 79, 103283. [Google Scholar] [CrossRef]
- Ranjbarzadeh, R.; Caputo, A.; Tirkolaee, E.; Ghoushchi, S.; Bendechache, M. Brain tumor segmentation of MRI images: A comprehensive review on the application of artificial intelligence tools. Comput. Biol. Med. 2023, 152, 106405. [Google Scholar] [CrossRef]
- Huang, C.; Wang, J.; Wang, S.; Zhang, Y. Applicable artificial intelligence for brain disease: A survey. Neurocomputing 2022, 504, 223–239. [Google Scholar] [CrossRef]
- Meraihi, Y.; Ramdane-Cherif, A.; Acheli, D.; Mahseur, M. Dragonfly algorithm: A comprehensive review and applications. Neural Comput. Appl. 2020, 32, 16625–16646. [Google Scholar] [CrossRef]
- Alshinwan, M.; Abualigah, L.; Shehab, M.; Elaziz, M.; Khasawneh, A.; Alabool, H.; Hamad, H. Dragonfly algorithm: A comprehensive survey of its results, variants, and applications. Multimed. Tools Appl. 2021, 80, 14979–15016. [Google Scholar] [CrossRef]
- Chatterjee, S.; Biswas, S.; Majee, A.; Sen, S.; Oliva, D.; Sarkar, R. Breast cancer detection from thermal images using a Grunwald-Letnikov-aided Dragonfly algorithm-based deep feature selection method. Comput. Biol. Med. 2022, 141, 105027. [Google Scholar] [CrossRef]
- Sarvamangala, D.; Kulkarni, R. A comparative study of bio-inspired algorithms for medical image registration. Adv. Intell. Comput. 2019, 687, 27–44. [Google Scholar]
- Wang, L.; Shi, R.; Dong, J. A hybridization of dragonfly algorithm optimization and angle modulation mechanism for 0-1 knapsack problems. Entropy 2021, 23, 598. [Google Scholar] [CrossRef]
- Emambocus, B.; Jasser, M.; Mustapha, A.; Amphawan, A. Dragonfly algorithm and its hybrids: A survey on performance, objectives and applications. Sensors 2021, 21, 7542. [Google Scholar] [CrossRef]
- Zhang, Z.; Hong, W. Electric load forecasting by complete ensemble empirical mode decomposition adaptive noise and support vector regression with quantum-based dragonfly algorithm. Nonlinear Dyn. 2019, 98, 1107–1136. [Google Scholar] [CrossRef]
- Yu, C.; Cai, Z.; Ye, X.; Wang, M.; Zhao, X.; Liang, G.; Chen, H.; Li, C. Quantum-like mutation-induced dragonfly-inspired optimization approach. Math. Comput. Simul. 2020, 178, 259–289. [Google Scholar] [CrossRef]
- Rajesh, P.; Shajin, F. Optimal allocation of EV charging spots and capacitors in distribution network improving voltage and power loss by Quantum-Behaved and Gaussian Mutational Dragonfly Algorithm (QGDA). Electr. Power Syst. Res. 2021, 194, 107049. [Google Scholar] [CrossRef]
- Liu, T.; Wang, C.; Zhu, H. A Novel Quantum Dragonfly Multi-Key Exchange Protocol beyond Conventional Attacks. Int. J. Theor. Phys. 2021, 60, 115–130. [Google Scholar] [CrossRef]
- Yemunarane, K.; Hema, A. Quantum dragonfly algorithm empowered neutrosophic expert system for Alzheimer disease detection. J. Green Eng. 2020, 10, 11754–11768. [Google Scholar]
- Wang, Z.; Ma, B.; Zhu, Y. Review of level set in image segmentation. Arch. Comput. Methods Eng. 2021, 28, 2429–2446. [Google Scholar] [CrossRef]
- Mohammed, Y.; El-Garouani, S.; Jellouli, I. A survey of methods for brain tumor segmentation-based MRI images. J. Comput. Des. Eng. 2023, 10, 266–293. [Google Scholar] [CrossRef]
- Tiwari, A.; Srivastava, S.; Pant, M. Brain tumor segmentation and classification from magnetic resonance images: Review of selected methods from 2014 to 2019. Pattern Recognit. Lett. 2020, 131, 244–260. [Google Scholar] [CrossRef]
- El-Baz, A.; Suri, J. Level Set Method in Medical Imaging Segmentation; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar]
- Shu, X.; Yang, Y.; Wu, B. A neighbor level set framework minimized with the split Bregman method for medical image segmentation. Signal Process. 2021, 189, 108293. [Google Scholar] [CrossRef]
- Yang, Y.; Xie, R.; Jia, W.; Zhao, G. Double level set segmentation model based on mutual exclusion of adjacent regions with application to brain MR images. Knowl.-Based Syst. 2021, 228, 107266. [Google Scholar] [CrossRef]
- Song, J.; Zhang, Z. Magnetic resonance imaging segmentation via weighted level set model based on local kernel metric and spatial constraint. Entropy 2021, 23, 1196. [Google Scholar] [CrossRef] [PubMed]
- Jin, R.; Tong, D.; Chen, Z. Level-set-based multiplicative intrinsic component optimization for brain tissue segmentation in T1-W and T2-W modality MRI. Expert Syst. Appl. 2023, 224, 119967. [Google Scholar] [CrossRef]
- Khosravanian, A.; Rahmanimanesh, M.; Keshavarzi, P.; Mozaffari, S. Enhancing level set brain tumor segmentation using fuzzy shape prior information and deep learning. Int. J. Imaging Syst. Technol. 2023, 33, 323–339. [Google Scholar] [CrossRef]
- Shu, X.; Yang, Y.; Liu, J.; Chang, X.; Wu, B. ALVLS: Adaptive local variances-Based level set framework for medical images segmentation. Pattern Recognit. 2023, 136, 109257. [Google Scholar] [CrossRef]
- Kalam, R.; Thomas, C.; Rahiman, M. Brain tumor detection in MRI images using adaptive-ANFIS classifier with segmentation of tumor and edema. Soft Comput. 2023, 27, 2279–2297. [Google Scholar] [CrossRef]
- Pang, Z.; Geng, M.; Zhang, L.; Zhou, Y.; Zeng, T.; Zheng, L.; Zhang, N.; Liang, D.; Zheng, H.; Dai, Y.; et al. Adaptive weighted curvature-based active contour for ultrasonic and 3T/5T MR image segmentation. Signal Process. 2023, 205, 108881. [Google Scholar] [CrossRef]
- Dhamija, T.; Gupta, A.; Gupta, S.; Katarya, R.; Singh, G. Semantic segmentation in medical images through transfused convolution and transformer networks. Appl. Intell. 2023, 53, 1132–1148. [Google Scholar] [CrossRef]
- Zhuang, M.; Chen, Z.; Wang, H.; Tang, H.; He, J.; Qin, B.; Yang, Y.; Jin, X.; Yu, M.; Jin, B.; et al. Efficient contour-based annotation by iterative deep learning for organ segmentation from volumetric medical images. Int. J. Comput. Assist. Radiol. Surg. 2023, 18, 379–394. [Google Scholar] [CrossRef]
- Khan, M.; Khan, A.; Alhaisoni, M.; Alqahtani, A.; Alsubai, S.; Alharbi, M.; Malik, N.; Damaševičius, R. Multimodal brain tumor detection and classification using deep saliency map and improved dragonfly optimization algorithm. Int. J. Imaging Syst. Technol. 2023, 33, 572–587. [Google Scholar] [CrossRef]
- Wei, L.; Liu, H.; Xu, J.; Shi, L.; Shan, Z.; Zhao, B.; Gao, Y. Quantum machine learning in medical image analysis: A Survey. Neurocomputing 2023, 525, 42–53. [Google Scholar] [CrossRef]
- Landman, J.; Mathur, N.; Li, Y.; Strahm, M.; Kazdaghli, S.; Prakash, A.; Kerenidis, I. Quantum Methods for Neural Networks and Application to Medical Image Classification. Quantum 2022, 6, 881. [Google Scholar] [CrossRef]
- Kumar, A. Study and analysis of different segmentation methods for brain tumor MRI application. Multimed. Tools Appl. 2023, 82, 7117–7139. [Google Scholar] [CrossRef] [PubMed]
- Abdalwahab, S.; Salman, N.; Rahi, A. Automatic brain tumor segmentation based on deep learning methods: A review. AIP Conf. Proc. 2023, 2475, 070014. [Google Scholar]
- Salpea, N.; Tzouveli, P.; Kollias, D. Medical image segmentation: A review of modern architectures. In Proceedings of the Computer Vision–ECCV 2022 Workshops; Springer Nature: Cham, Switzerland, 2023; pp. 691–708. [Google Scholar]
- Fawzi, A.; Achuthan, A.; Belaton, B. Brain image segmentation in recent years: A narrative review. Brain Sci. 2021, 11, 1055. [Google Scholar] [CrossRef] [PubMed]
- Celard, P.; Iglesias, E.; Sorribes-Fdez, J.; Romero, R.; Vieira, A.; Borrajo, L. A survey on deep learning applied to medical images: From simple artificial neural networks to generative models. Neural Comput. Appl. 2023, 35, 2291–2323. [Google Scholar] [CrossRef]
- Saeedi, S.; Rezayi, S.; Keshavarz, H.; Niakan, S. MRI-based brain tumor detection using convolutional deep learning methods and chosen machine learning techniques. BMC Med. Inform. Decis. Mak. 2023, 23, 16. [Google Scholar] [CrossRef]
- Gaikwad, S.; Patel, S.; Shetty, A. Brain tumor detection: An application based on machine learning. In Proceedings of the 2021 2nd International Conference for Emerging Technology (INCET), Belagavi, India, 21–23 May 2021; pp. 1–4. [Google Scholar]
- Kumar, R.; Kakarla, J.; Isunuri, B.; Singh, M. Multi-class brain tumor classification using residual network and global average pooling. Multimed. Tools Appl. 2021, 80, 13429–13438. [Google Scholar] [CrossRef]
- Payette, K.; Kottke, R.; Jakab, A. Efficient multi-class fetal brain segmentation in high resolution MRI reconstructions with noisy labels. In International Workshop on Medical Ultrasound, and Preterm, Perinatal and Paediatric Image Analysis; Springer International Publishing: New York, NY, USA, 2020; pp. 295–304. [Google Scholar]
- Jiang, Y.; Gu, X.; Wu, D.; Hang, W.; Xue, J.; Qiu, S.; Lin, C. A novel negative-transfer-resistant fuzzy clustering model with a shared cross-domain transfer latent space and its application to brain CT image segmentation. IEEE/ACM Trans. Comput. Biol. Bioinform. 2020, 18, 40–52. [Google Scholar] [CrossRef]
- Nair, R.; David, E.; Rajagopal, S. A robust anisotropic diffusion filter with low arithmetic complexity for images. EURASIP J. Image Video Process. 2019, 2019, 48. [Google Scholar] [CrossRef]
- Groza, V.; Tuchinov, B.; Pavlovskiy, E.; Amelina, E.; Amelin, M.; Golushko, S.; Letyagin, A. Data preprocessing via multi-sequences MRI mixture to improve brain tumor segmentation. In Proceedings of the International Conference on Bioinformatics and Biomedical Engineering, Granada, Spain, 6–8 May 2020; Springer International Publishing: New York, NY, USA, 2020; pp. 695–704. [Google Scholar]
- Sumithra, M.; Malathi, S. A Novel Distributed Matching Global and Local Fuzzy Clustering (DMGLFC) for 3D Brain Image Segmentation for Tumor Detection. IETE J. Res. 2022, 68, 2363–2375. [Google Scholar] [CrossRef]
- Soomro, T.; Zheng, L.; Afifi, A.; Ali, A.; Soomro, S.; Yin, M.; Gao, J. Image segmentation for MR brain tumor detection using machine learning: A Review. IEEE Rev. Biomed. Eng. 2022, 16, 70–90. [Google Scholar] [CrossRef]
- Mandle, A.; Sahu, S.; Gupta, G. Brain Tumor Segmentation and Classification in MRI using Clustering and Kernel-Based SVM. Biomed. Pharmacol. J. 2022, 15, 699–716. [Google Scholar] [CrossRef]
- Dey, N.; Ashour, A. Meta-heuristic algorithms in medical image segmentation: A review. Adv. Appl. Metaheurist. Comput. 2018, 2018, 185–203. [Google Scholar]
- Khalil, H.; Darwish, S.; Ibrahim, Y.; Hassan, O. 3D-MRI brain tumor detection model using modified version of level set segmentation based on dragonfly algorithm. Symmetry 2020, 12, 1256. [Google Scholar] [CrossRef]
- Elkorany, A.; Marey, M.; Almustafa, K.; Elsharkawy, Z. Breast cancer diagnosis using support vector machines optimized by whale optimization and dragonfly algorithms. IEEE Access 2022, 10, 69688–69699. [Google Scholar] [CrossRef]
- Xie, T.; Yao, J.; Zhou, Z. DA-based parameter optimization of combined kernel support vector machine for cancer diagnosis. Processes 2019, 7, 263. [Google Scholar] [CrossRef]
- Parvathavarthini, S.; Deepa, D. A hybrid artificial neural network classifier based on feature selection using binary dragonfly optimization for breast cancer detection. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1055, 012107. [Google Scholar] [CrossRef]
- Leena, B.; Jayanthi, A. Automatic Brain Tumor Classification via Lion plus Dragonfly Algorithm. J. Digit. Imaging 2022, 35, 1382–1408. [Google Scholar] [CrossRef] [PubMed]
- Ramesh, A.; Kuttiappan, H. Detection of brain tumor size using modified deep learning and multilevel thresholding utilizing modified dragonfly optimization algorithm. Concurr. Comput. Pract. Exp. 2022, 34, e7016. [Google Scholar] [CrossRef]
- Rahman, C.; Rashid, T. Dragonfly algorithm and its applications in applied science survey. Comput. Intell. Neurosci. 2019, 2019, 9293617. [Google Scholar] [CrossRef]
- Zhang, C.; Shen, X.; Cheng, H.; Qian, Q. Brain tumor segmentation based on hybrid clustering and morphological operations. Int. J. Biomed. Imaging 2019, 2019, 7305832. [Google Scholar] [CrossRef]
- Elshaikh, B.; Garelnabi, M.; Omer, H.; Sulieman, A.; Habeeballa, B.; Tabeidi, R. Recognition of brain tumors in MRI images using texture analysis. Saudi J. Biol. Sci. 2021, 28, 2381–2387. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Tanveer, J.; Masoud, A.; Yousefpoor, E.; Sadegh, M.; Khan, F.; Haider, A. A Cluster-Tree-Based Secure Routing Protocol Using Dragonfly Algorithm (DA) in the Internet of Things (IoT) for Smart Agriculture. Mathematics 2022, 11, 80. [Google Scholar] [CrossRef]
- Rahman, C.; Rashid, T.; Alsadoon, A.; Bacanin, N.; Fattah, P.; Mirjalili, S. A survey on dragonfly algorithm and its applications in engineering. Evol. Intell. 2023, 16, 1–21. [Google Scholar] [CrossRef]
- Chatterjee, B.; Acharya, S.; Bhattacharyya, T.; Mirjalili, S.; Sarkar, R. Stock market prediction using Altruistic Dragonfly Algorithm. PLoS ONE 2023, 18, e0282002. [Google Scholar] [CrossRef] [PubMed]
- Zhong, L.; Zhou, Y.; Zhou, G.; Luo, Q. Enhanced discrete dragonfly algorithm for solving four-color map problems. Appl. Intell. 2023, 53, 6372–6400. [Google Scholar] [CrossRef]
- Köse, B.; Aygün, H.; Pak, S. Parameter estimation of the wind speed distribution model by dragonfly algorithm. J. Fac. Eng. Archit. Gazi Univ. 2023, 38, 1747–1756. [Google Scholar]
- Gharehchopogh, F. Quantum-inspired metaheuristic algorithms: Comprehensive survey and classification. Artif. Intell. Rev. 2023, 56, 5479–5543. [Google Scholar] [CrossRef]
- Yang, Y.; Feng, C.; Wang, R. Automatic segmentation model combining U-Net and level set method for medical images. Expert Syst. Appl. 2020, 153, 113419. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, R.; Feng, C. Level set formulation for automatic medical image segmentation based on fuzzy clustering. Signal Process. Image Commun. 2020, 87, 115907. [Google Scholar] [CrossRef]
- Wali, S.; Li, C.; Imran, M.; Shakoor, A.; Basit, A. Level-set Evolution for Medical Image Segmentation with Alternating Direction Method of Multipliers. Signal Process. 2023, 19, 109105. [Google Scholar] [CrossRef]
- Feng, C.; Chen, S.; Zhao, D.; Yang, J. Region based level sets for image segmentation: A brief comparative review with a fast model FREEST. Multimed. Tools Appl. 2023, 18, 1–31. [Google Scholar] [CrossRef]
- Ramudu, K.; Bhavani, G.; Nishanth, M.; Raj, A.; Analdas, V. Level Set Segmentation of Images using Block Matching Local SVD Operator based Sparsity and TV Regularization. Int. J. Image Graph. Signal Process. 2023, 13, 47–58. [Google Scholar] [CrossRef]
- Yu, H.; He, F.; Pan, Y. A scalable region-based level set method using adaptive bilateral filter for noisy image segmentation. Multimed. Tools Appl. 2020, 79, 5743–5765. [Google Scholar] [CrossRef]
- Hussain, S.; Xi, X.; Ullah, I.; Wu, Y.; Ren, C.; Zhao, L.; Tian, C.; Yin, Y. Contextual level-set method for breast tumor segmentation. IEEE Access 2020, 8, 189343–189353. [Google Scholar] [CrossRef]
- Yu, H.; He, F.; Pan, Y. A survey of level set method for image segmentation with intensity inhomogeneity. Multimed. Tools Appl. 2020, 79, 28525–28549. [Google Scholar] [CrossRef]
- Maciejewski, M.; Surtel, W.; Maciejewska, B.; Małecka-Massalska, T. Level-set image processing methods in medical image segmentation. Bio-Algorithms Med-Syst. 2015, 11, 47–51. [Google Scholar] [CrossRef]
- Menze, B.; Jakab, A.; Bauer, S.; Kalpathy-Cramer, J.; Farahani, K.; Kirby, J.; Burren, Y.; Porz, N.; Slotboom, J.; Wiest, R.; et al. The multimodal brain tumor image segmentation benchmark (BRATS). IEEE Trans. Med. Imaging 2014, 34, 1993–2024. [Google Scholar] [CrossRef]
- Ghaffari, M.; Sowmya, A.; Oliver, R. Automated brain tumor segmentation using multimodal brain scans: A survey based on models submitted to the BRATS 2012–2018 challenges. IEEE Rev. Biomed. Eng. 2019, 13, 156–168. [Google Scholar] [CrossRef]
- Kermi, A.; Andjouh, K.; Zidane, F. Fully automated brain tumor segmentation system in 3D-MRI using symmetry analysis of brain and level sets. IET Image Process. 2018, 12, 1964–1971. [Google Scholar] [CrossRef]
- Mahalakshmi, A.; Krishnappa, H.; Jayadevappa, D. A hybrid approach for the segmentation of brain tumor using k-means clustering and variational level set. J. Adv. Res. Dyn. Control. Syst. 2018, 10, 258–264. [Google Scholar]
- Virupakshappa, A.; Amarapur, B. Computer-aided diagnosis applied to MRI images of brain tumor using cognition based modified level set and optimized ANN classifier. Multimed. Tools Appl. 2020, 79, 3571–3599. [Google Scholar] [CrossRef]
- Khadidos, A.; Sanchez, V.; Li, C. Weighted level set evolution based on local edge features for medical image segmentation. IEEE Trans. Image Process. 2017, 26, 1979–1991. [Google Scholar] [CrossRef] [PubMed]
- Le, T.; Gummadi, R.; Savvides, M. Deep recurrent level set for segmenting brain tumors. In Medical Image Computing and Computer Assisted Intervention, Part III; Springer International Publishing: New York, NY, USA, 2018; pp. 646–653. [Google Scholar]
- Chen, H.; Qin, Z.; Ding, Y.; Tian, L.; Qin, Z. Brain tumor segmentation with deep convolutional symmetric neural network. Neurocomputing 2020, 392, 305–313. [Google Scholar] [CrossRef]
- Wu, W.; Li, D.; Du, J.; Gao, X.; Gu, W.; Zhao, F.; Feng, X.; Yan, H. An intelligent diagnosis method of brain MRI tumor segmentation using deep convolutional neural network and SVM algorithm. Comput. Math. Methods Med. 2020, 2020, 6789306. [Google Scholar] [CrossRef]
- Sharif, M.; Amin, J.; Raza, M.; Yasmin, M.; Satapathy, S. An integrated design of particle swarm optimization (PSO) with fusion of features for detection of brain tumor. Pattern Recognit. Lett. 2020, 129, 150–157. [Google Scholar] [CrossRef]
- Alrosan, A.; Alomoush, W.; Norwawi, N.; Alswaitti, M.; Makhadmeh, S. An improved artificial bee colony algorithm based on mean best-guided approach for continuous optimization problems and real brain MRI images segmentation. Neural Comput. Appl. 2021, 33, 1671–1697. [Google Scholar] [CrossRef]
- Christ MC, J.; Subramanian, R. Clown fish queuing and switching optimization algorithm for brain tumor segmentation. Biomed. Res. 2016, 27, 65–69. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm-Based | Advantages | Disadvantages | |
|---|---|---|---|
| Shu, X. et al. [30] | Level set with split Bregman technique | 3D segmentation model | Low accuracy when dealing with heterogeneous tumors |
| Yang, Y. et al. [31] | Two-level set segmentation based on mutual exclusion | Ensure the independence of neighboring regions | Require prior knowledge for parameter initialization |
| Lei, X. et al. [10] | Sparse constrained level set segmentation | Accurate to identify common features of the shape of brain tumors | Inaccurate segmentation results when dealing with noisy images |
| Song, J., Zhang, Z. [32] | Weighted level set model | Segmenting MR images with inhomogeneous intensity | Not segment 3D MRI images directly |
| Jin, R. et al. [33] | Level set with a constraint term | High accuracy when the number of tissues and the level of noise grow | The setting of the optimal threshold is very subjective |
| Khosravanian, A. et al. [34] | Fuzzy shape prior term with deep learning | Handling contour leakage and shrinkage | Need complex network architecture |
| Shu, X. et al. [35] | Adaptive local variance-based level set | Accurate and noise resilience | Require prior knowledge for parameter initialization |
| Kalam, R. et al. [36] | Modified region growing with neuro-fuzzy classifier | Segmenting MR images with inhomogeneous intensity | Require prior knowledge for parameter initialization and the post-processing step |
| Pang, Z. et al. [37] | Adaptive weighted curvature, with heat kernel convolution | Reduce the computation complexity | The setting of the optimal threshold is very subjective |
| Dhamija, T. et al. [38] | Level set with two deep learning models | Handling different segmentation tasks | Require high computational resources |
| Zhuang, M. et al. [39] | Iterative deep learning technique with boundary representation | Enhance the precision of boundary identification | Need complex network architecture |
| Khan, M., et al. [40] | Active contour and deep learning feature optimization | Segmenting MR images with inhomogeneous intensity | Need complex network architecture |
| Accuracy (%) | Recall (%) | Precision (%) | Dice Score | Specificity | |
|---|---|---|---|---|---|
| Symmetry Analysis, Level Set [85] | 93.43 | 89.15 | 90.60 | 0.911 | 0.931 |
| K-means, Level Set [86] | 89.45 | 92.87 | 75.97 | 0.902 | 0.945 |
| ANN, Level Set [87] | 96.80 | 95.30 | 94.16 | 0.940 | 0.923 |
| Local edge features, Weighted level set [88] | 95.62 | 94.19 | 93.57 | 0.920 | 0.965 |
| Dragonfly, Level Set [59] | 96.21 | 95.15 | 93.85 | 0.923 | 0.987 |
| Proposed Model | 98.95 | 97.36 | 95.14 | 0.947 | 0.993 |
| Models | Accuracy (%) | Recall (%) | Precision (%) | Dice Score | Specificity |
|---|---|---|---|---|---|
| DCNN, level set [89] | 93.43 | 89.15 | 90.60 | 0.913 | 0.991 |
| DCNN, symmetric mask [90] | 89.45 | 92.87 | 75.97 | 0.828 | 0.891 |
| DCNN, SVM [87] | 96.80 | 95.30 | 94.36 | 0.932 | 0.989 |
| Proposed Model | 98.95 | 97.36 | 95.14 | 0.948 | 0.995 |
| Models | Accuracy (%) | Recall (%) | Precision (%) | Dice Score | Specificity |
|---|---|---|---|---|---|
| QDA, Level Set, mutation procedure (Proposed) | 98.97 | 97.40 | 95.20 | 0.947 | 0.992 |
| PSO, Level Set [92] | 97.30 | 95.13 | 94.90 | 0.941 | 0.987 |
| ABC, Level Set [93] | 97.68 | 95.67 | 94.86 | 0.945 | 0.989 |
| CF, Level Set [94] | 97.87 | 95.95 | 94.35 | 0.939 | 0.990 |
| Models | Accuracy (%) | Mean | Standard Deviation | Median | 25 Quartile | 75 Quartile |
|---|---|---|---|---|---|---|
| k-means, QDA, and level set | 98.95 | 0.976 | 0.032 | 0.975 | 0.972 | 0.979 |
| QDA, and level set | 87.63 | 0.845 | 0.064 | 0.839 | 0.837 | 0.840 |
| Tumor Type/Plane | Axial | Coronal | Sagittal |
|---|---|---|---|
| Meningioma | 0.913 | 0.923 | 0.985 |
| Glioma | 0.939 | 0.940 | 0.986 |
| Pituitary | 0.947 | 0.943 | 0.909 |
| Models | Hausdorff 95 | Convergence Speed |
|---|---|---|
| k-means, QDA, and level set | 4.41 | 30 independent runs |
| QDA, and level set | 6.92 | 75 independent runs |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Darwish, S.M.; Abu Shaheen, L.J.; Elzoghabi, A.A. A New Medical Analytical Framework for Automated Detection of MRI Brain Tumor Using Evolutionary Quantum Inspired Level Set Technique. Bioengineering 2023, 10, 819. https://doi.org/10.3390/bioengineering10070819
Darwish SM, Abu Shaheen LJ, Elzoghabi AA. A New Medical Analytical Framework for Automated Detection of MRI Brain Tumor Using Evolutionary Quantum Inspired Level Set Technique. Bioengineering. 2023; 10(7):819. https://doi.org/10.3390/bioengineering10070819
Chicago/Turabian StyleDarwish, Saad M., Lina J. Abu Shaheen, and Adel A. Elzoghabi. 2023. "A New Medical Analytical Framework for Automated Detection of MRI Brain Tumor Using Evolutionary Quantum Inspired Level Set Technique" Bioengineering 10, no. 7: 819. https://doi.org/10.3390/bioengineering10070819
APA StyleDarwish, S. M., Abu Shaheen, L. J., & Elzoghabi, A. A. (2023). A New Medical Analytical Framework for Automated Detection of MRI Brain Tumor Using Evolutionary Quantum Inspired Level Set Technique. Bioengineering, 10(7), 819. https://doi.org/10.3390/bioengineering10070819