
Integrating Drone Technology into an Innovative Agrometeorological Methodology for the Precise and Real-Time Estimation of Crop Water Requirements

 ,
,  ,
,  ,
,  ,
,  ,
, 
Abstract
:1. Introduction
2. Description of the GWD Concept
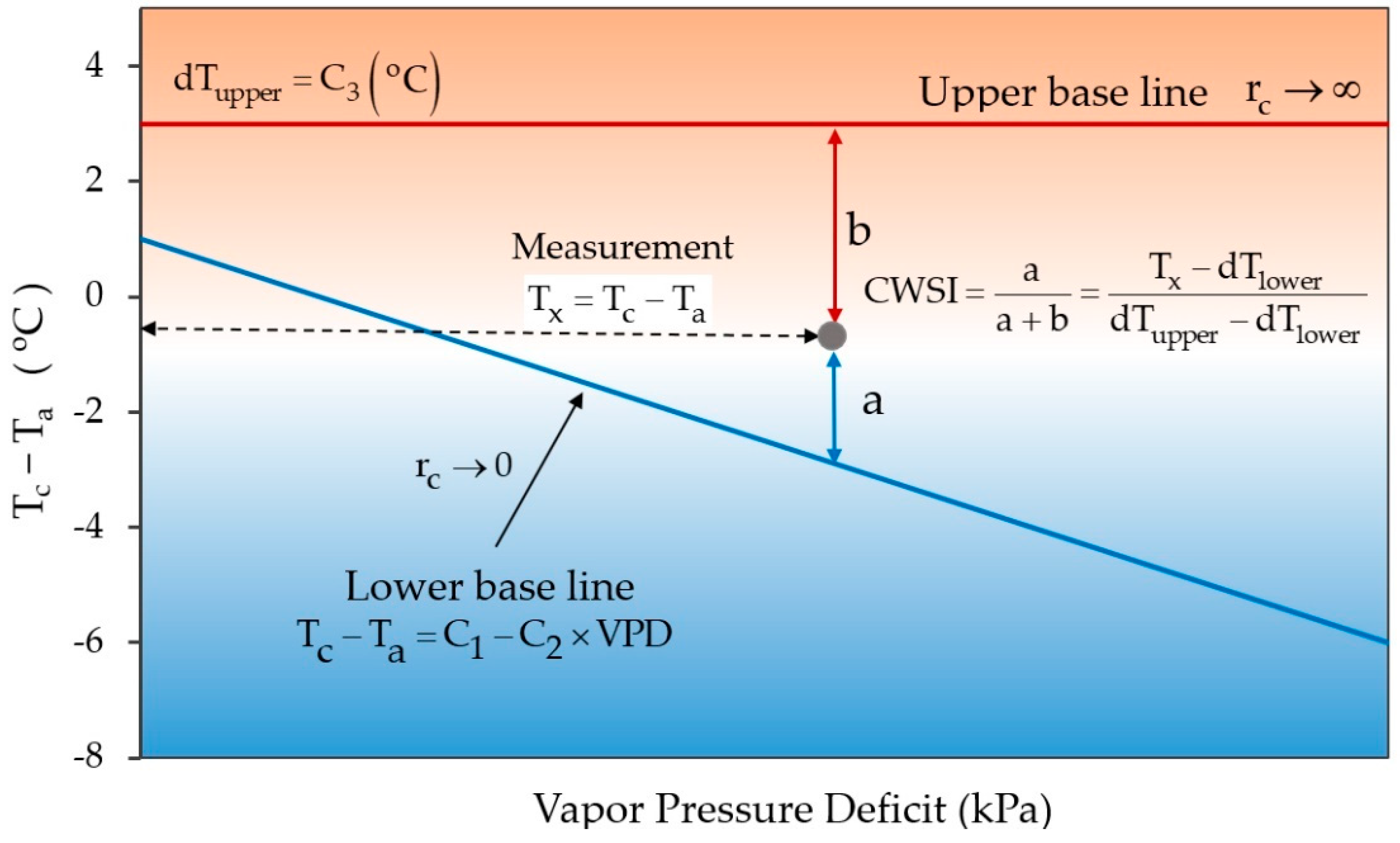
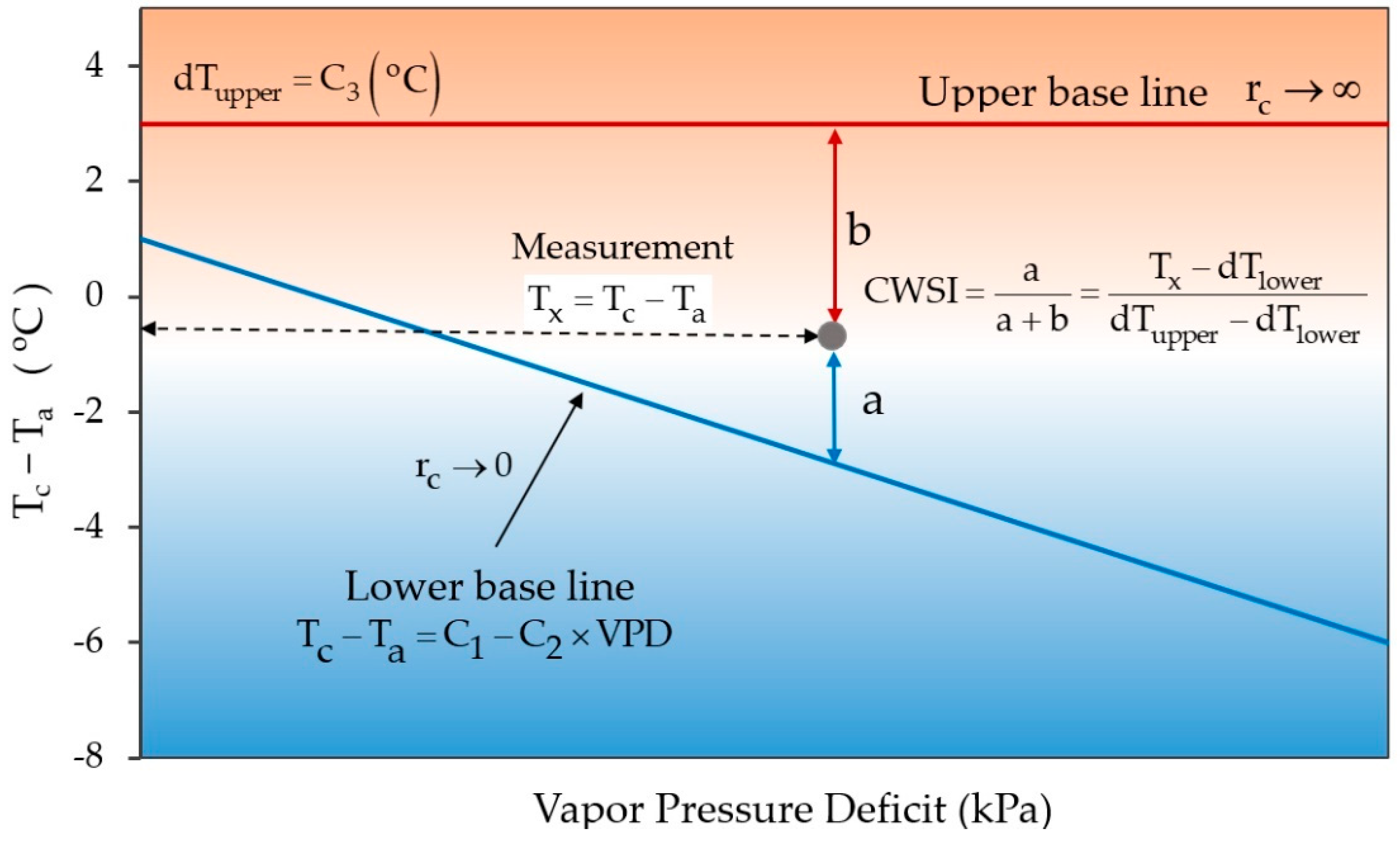
2.1. CWSI—Empirical and Theoretical Approaches
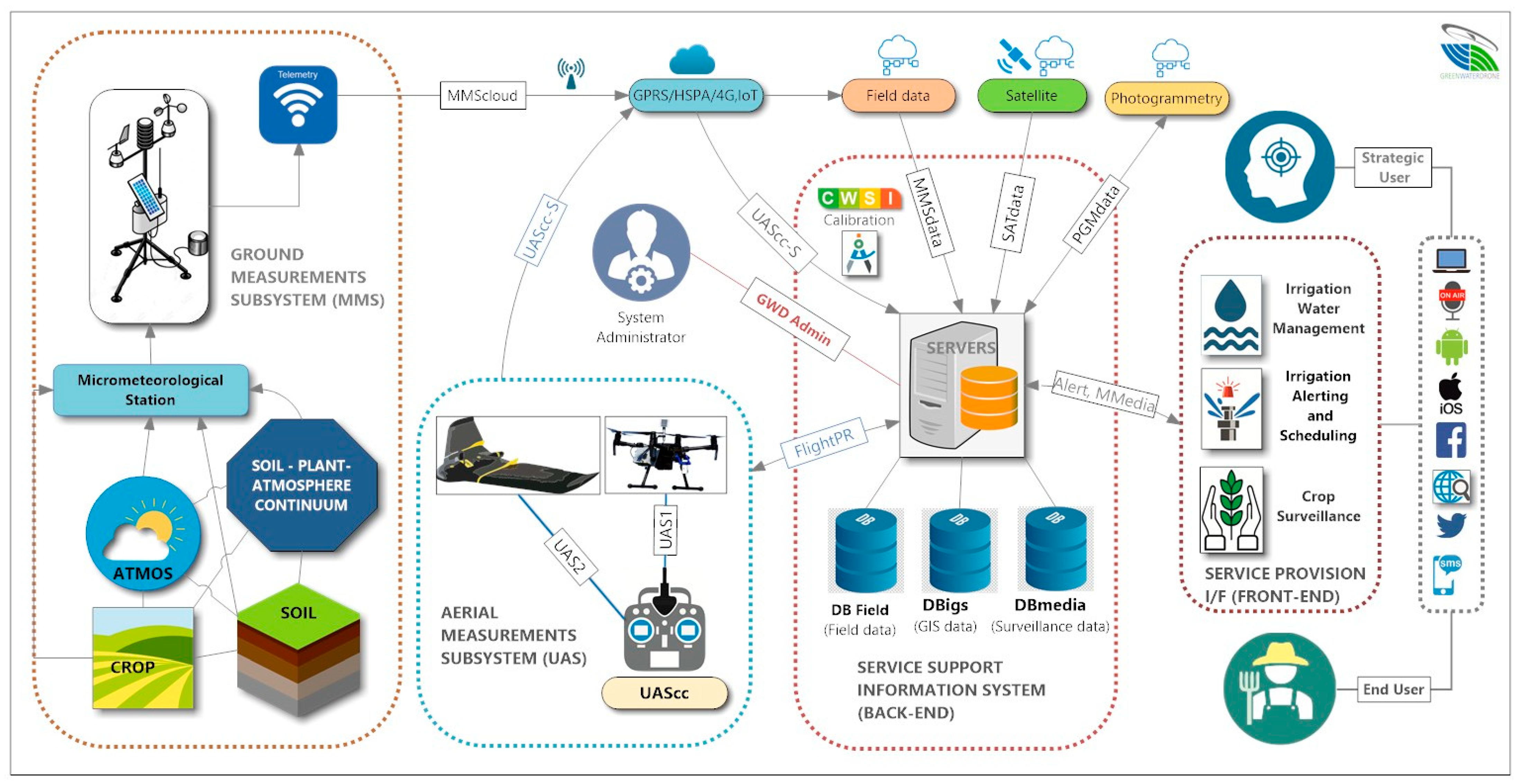
2.2. Structure and Architecture of the GWD Project
- The ground measurements subsystem (MMS), which is applied only during the calibration phase, consists of micrometeorological stations and their integrated/peripheral sensors, which are required to collect microclimatic and soil measurements of the crop field. Data collected from a station is used to calibrate and approximate the CWSI of a specific crop under the local climatic regime for one growing season. Data is communicated to the system over available mobile WAN infrastructures (2/3/4 G, IoT).
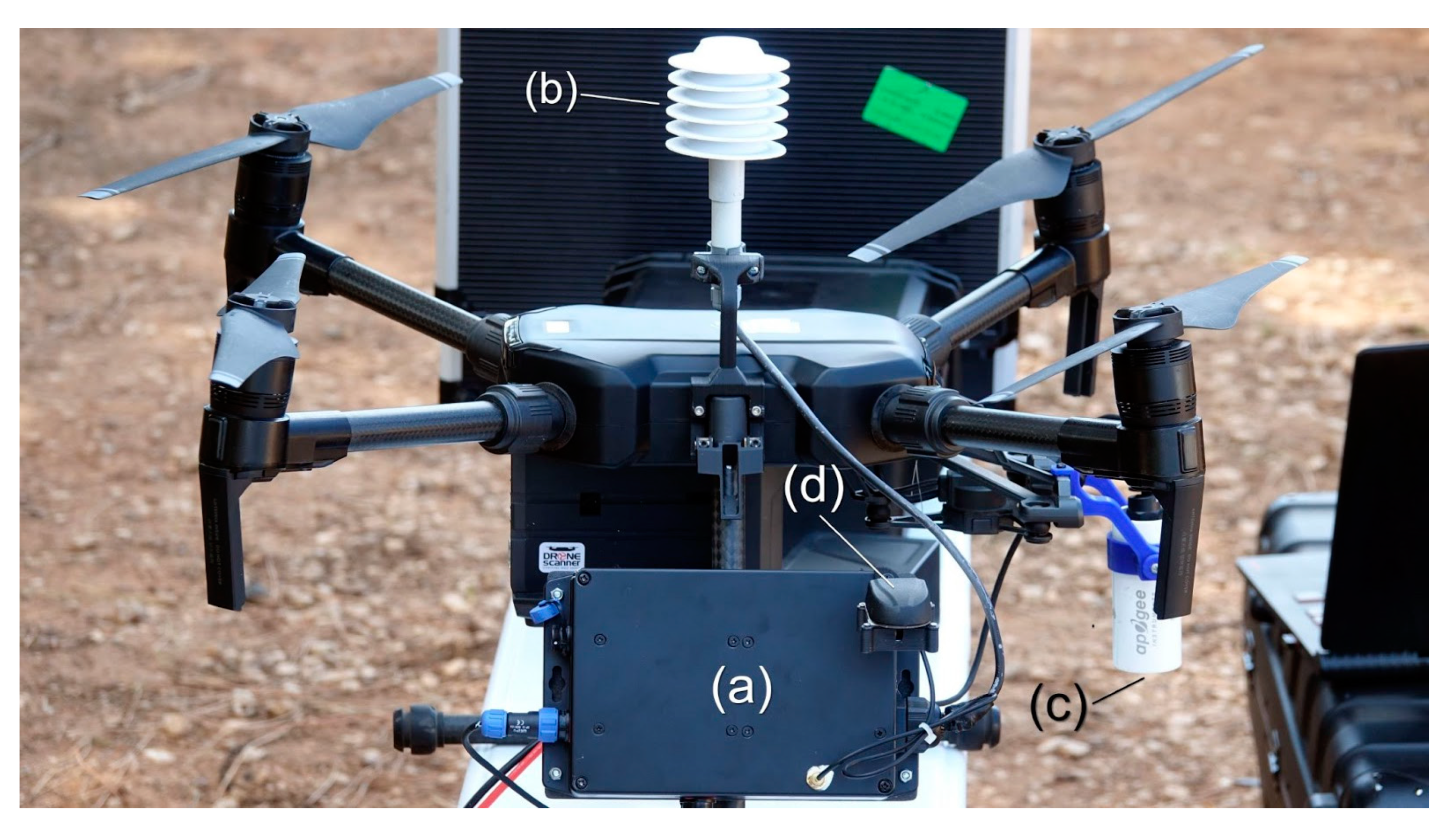
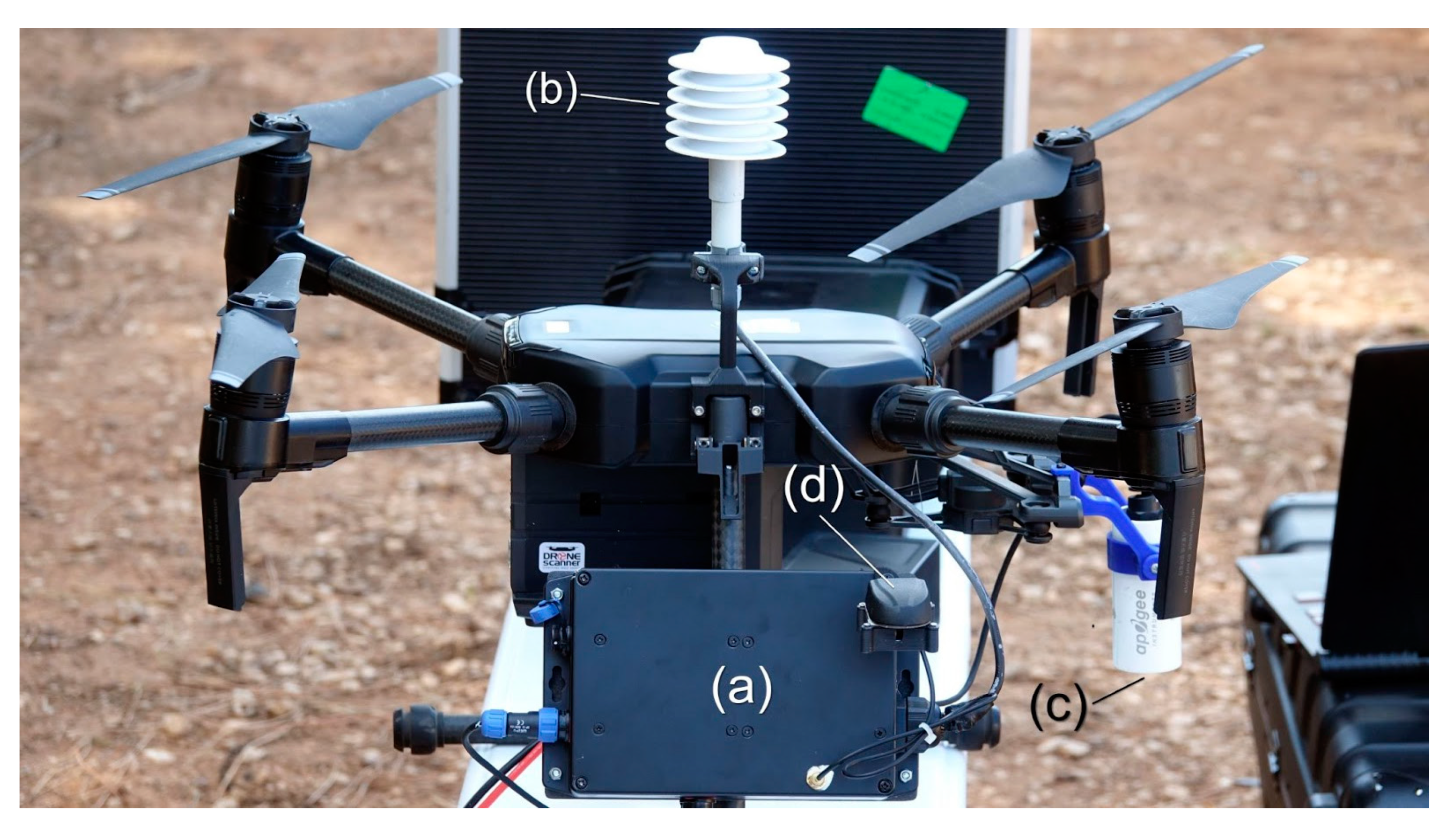
- The aerial measurement subsystem (UAS) consists of two types of UAVs. A quadcopter platform UAS1 uses an autonomous microstation to collect raw spatial data from the crop foliage and environment (infrared temperature, air temperature, relative humidity, accurate coordinates, and elevations). A fixed-wing platform UAS2 is required to collect thermal, multispectral, and photogrammetry images over large crop areas. Field data collected by the UAS is communicated to the system over available mobile WAN infrastructures (2/3/4 G, IoT). Both scheduled (e.g., during calibration and normal operation) and emergency (e.g., extreme weather conditions) flights are managed by the GWD System Administrator via the FlightPR interface.
- The service support information system (BackEnd) implements the crop data management necessary for the storage, classification, management, and updating of field measurements, empirical irrigation data, spatial and crop quality data, field status multimedia, end-user preferences, and interfaces with external services (satellite imagery, photogrammetry applications). In addition, it interconnects and supports all other subsystems and is responsible for providing the services of the system (alerting and multimedia content) to all types of supported end users.
- The service provision I/Fs (FrontEnd) includes appropriate web interfaces of the system to predefined types of GWD users, such as plain (farmers/agronomists), group (partnerships), and strategic (local/regional authorities) end users, with graded access to the three supported applications through different devices (PCs, smartphones, etc.) and relevant GUIs.
- Irrigation alerting and scheduling (IRRas): The plain end user (farmer/agronomist/farmer partnership) receives alerts in near real time regarding the short-term need to irrigate (or not) a specific crop based on CWSI calculations and empirical irrigation scheduling.
- Crop surveillance (CS): The plain end user (farmer/agronomist/farmer partnership) can view on-demand, multimedia content (e.g., photos/video relating to crop condition) of a field or receive alerts in near real time regarding the availability of synchronous video/photos of his crop in the case of a natural disaster or a security issue triggering an emergency drone flight.
- Irrigation water management (IRRmgt): The strategic user (agricultural institute, local/regional authorities) may select zones (clusters) on a graphical interface with a map of the area covered by the GWD system (effectively calibrated crops in the area) and obtain irrigation requirements for specific crop patterns and periods, thus enabling the implementation of scenarios for future irrigation water policies.
3. Case Study—Materials and Methodology
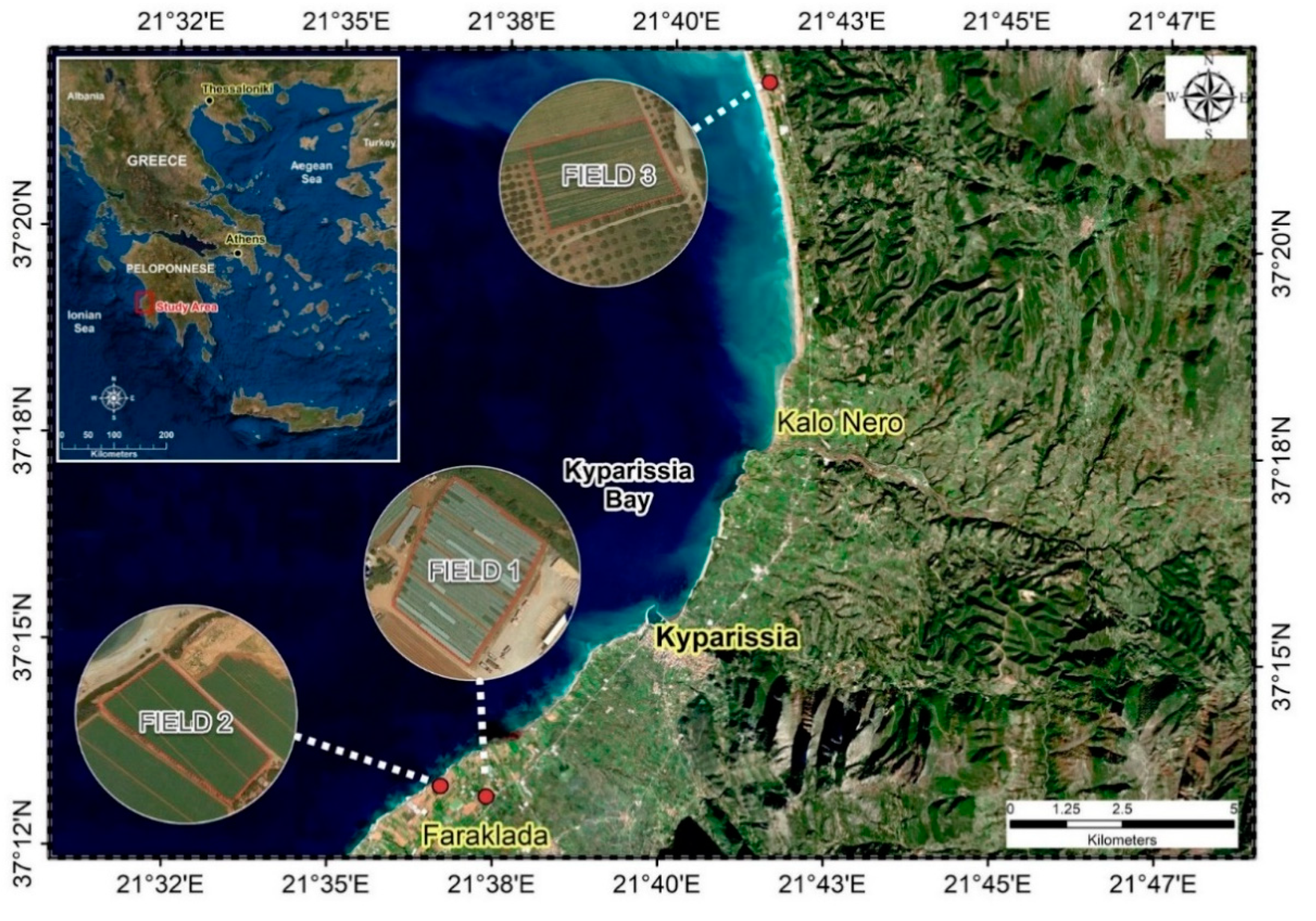
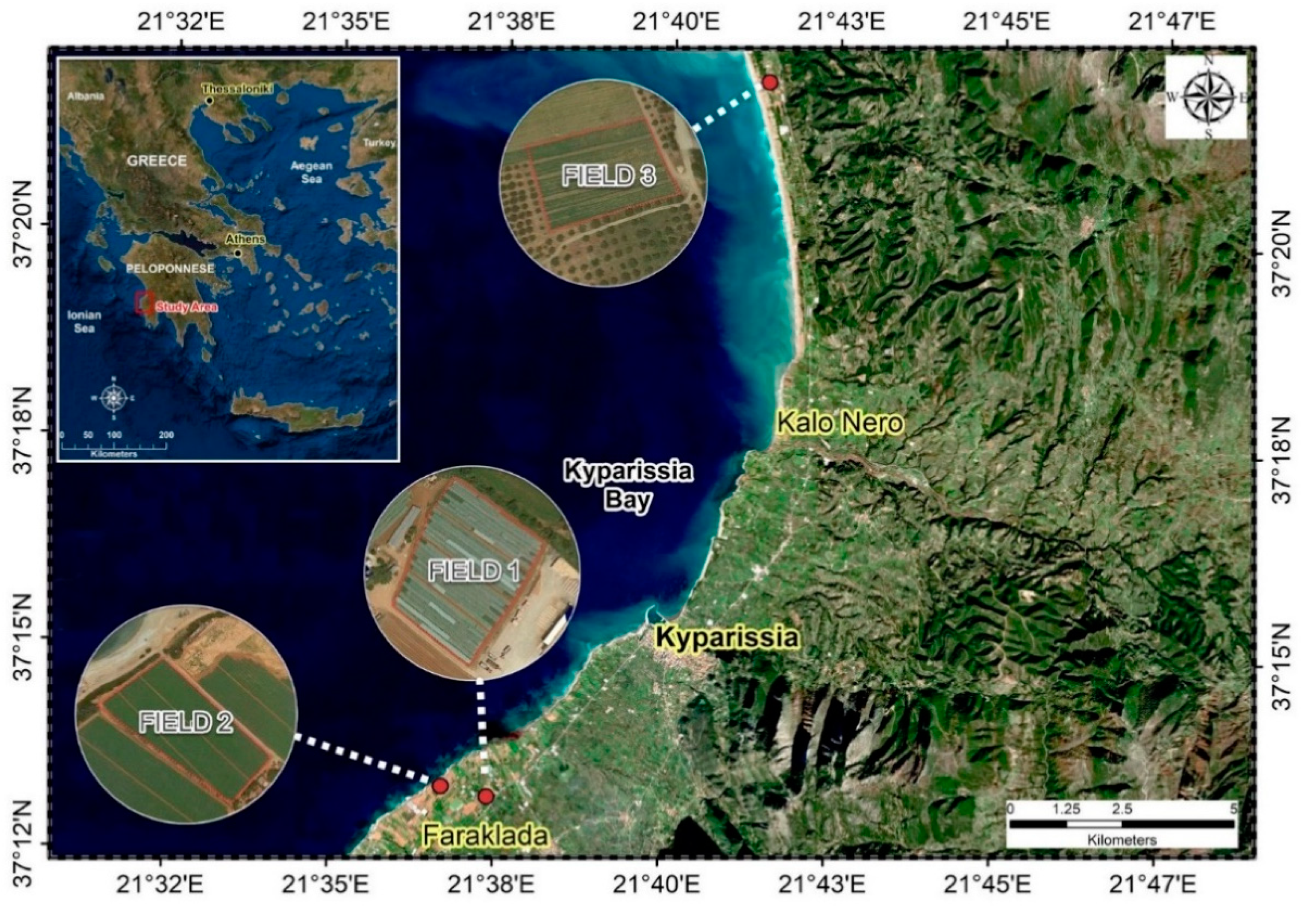
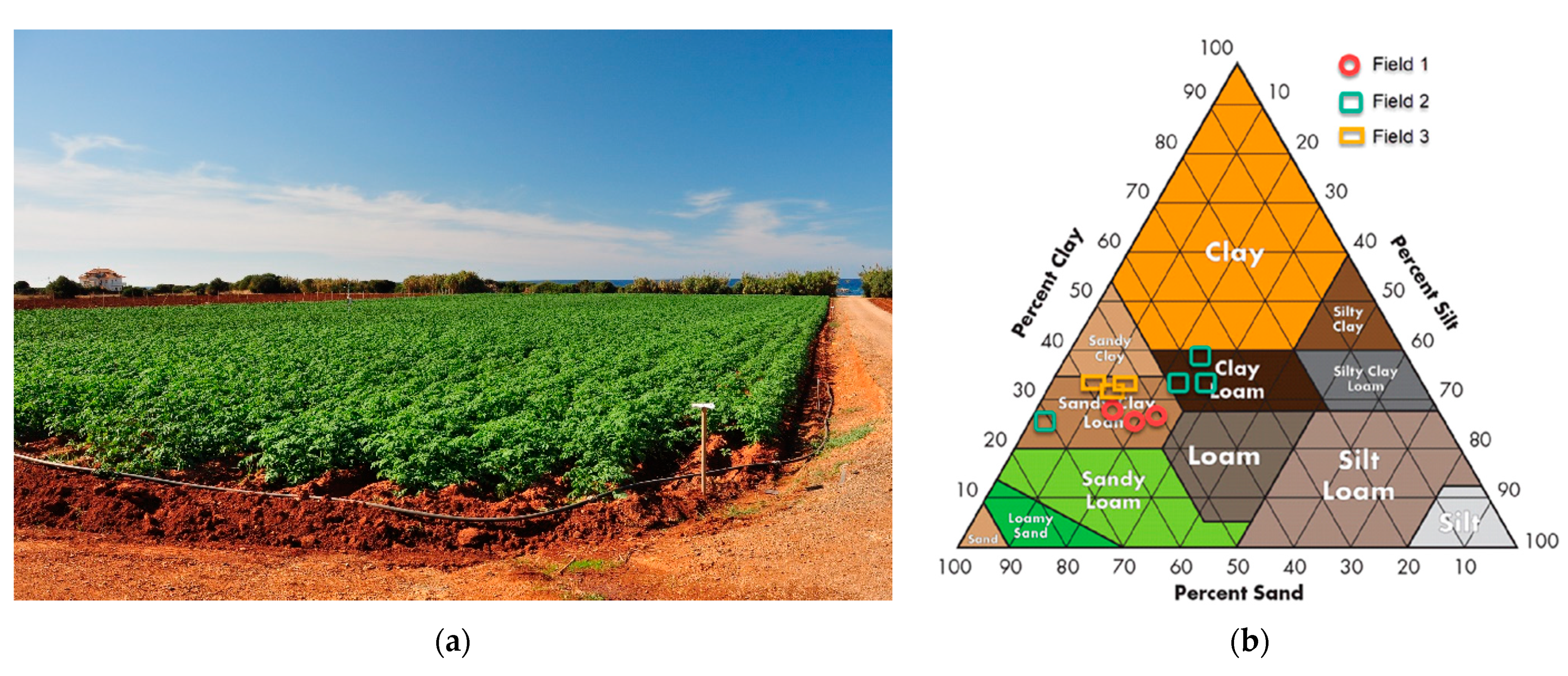
3.1. Study Area
3.2. Ground Micrometeorological Station
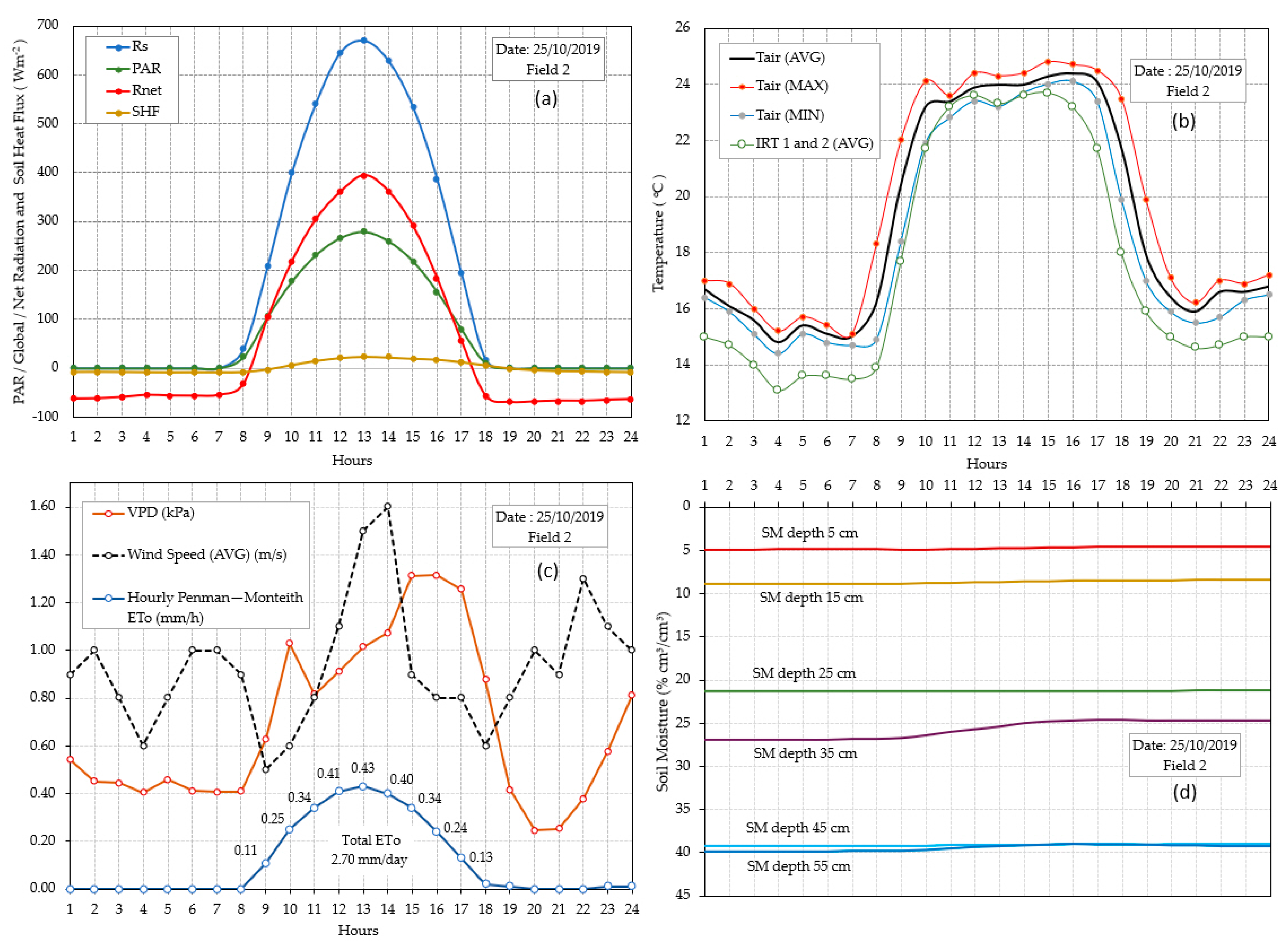
3.2.1. Measurements above Crops
- A high-precision miniature air temperature (T) and relative humidity (RH) sensor model EE08 (Elektronik Ges.m.b.H, Austria) working over a wide range was installed at a 2 m level.
- The LPPYRA02 fitted on stations 2 and 3 is a spectrally first-class pyranometer that measures the shortwave (Rs) solar radiation flux density on a flat surface (in Wm−2; global irradiance, sum of direct and diffuse radiation).
- A pyranometer following ISO 9060:2018 with the criteria of the WMO “Guide to Meteorological Instruments and Methods of Observation.” An albedometer LP PYRA 05 (Delta OHM, Italy) was fitted on station 1 and measured the global radiation (in Wm−2) and the albedo of any surface. It was manufactured incorporating two LPPYRA02 pyranometers into only one body.
- Net radiation pyranometer (RNET LP NET 07 Delta OHM, Italy) for the net flux density measurement (Rn) passing through a surface across the near-ultraviolet and the far-infrared spectral ranges.
- Photosynthetically active radiation sensor PAR (QUANTUM SENSOR Model SQ-100-SS APOGEE, Italy) that measured the total radiation across the range of 400–700 nm expressed as photosynthetic photon flux density (in µmol m−2 s, equal to μE m−2 s).
- Two tipping bucket rain gauges, model HD2015 and model HD2015 (Delta OHM, Italy), for precipitation measurements in millimeters (Pre) were installed on stations 1 and 3. It should be noted the distance between meteostations 2 and 3 was 15 km along the north–south axis, while the distance between meteostations 1 and 2 was 1 km.
- Cup anemometers for horizontal wind speed (WS) measurement (in m/s; model 4.3519.00.167 Thies GmbH & Co, Germany) and wind direction (WS) sensor (in degrees; model 4.3140.51.010 Thies) were installed on the mast at a height of 3.4 m for the three meteostations.
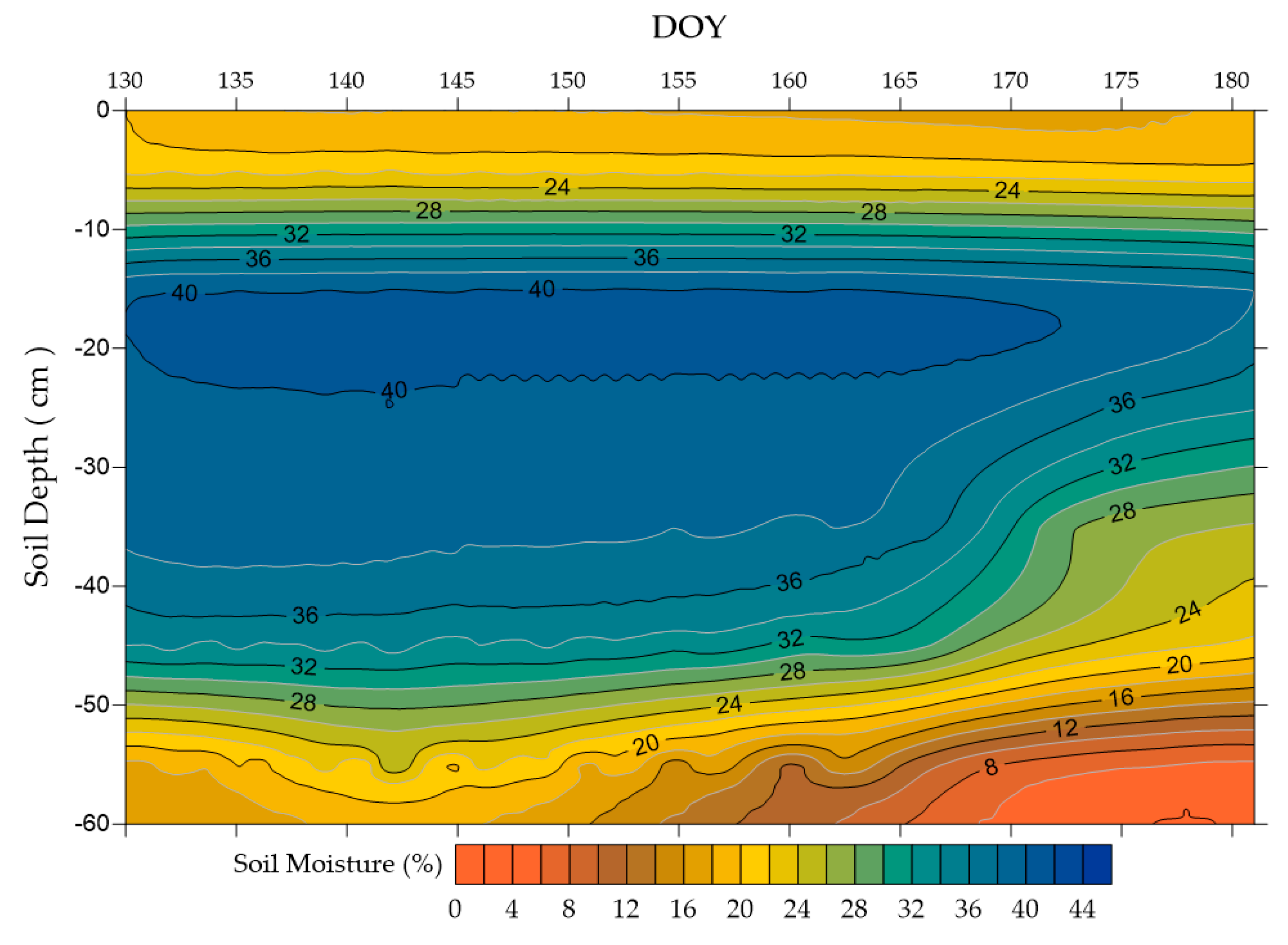
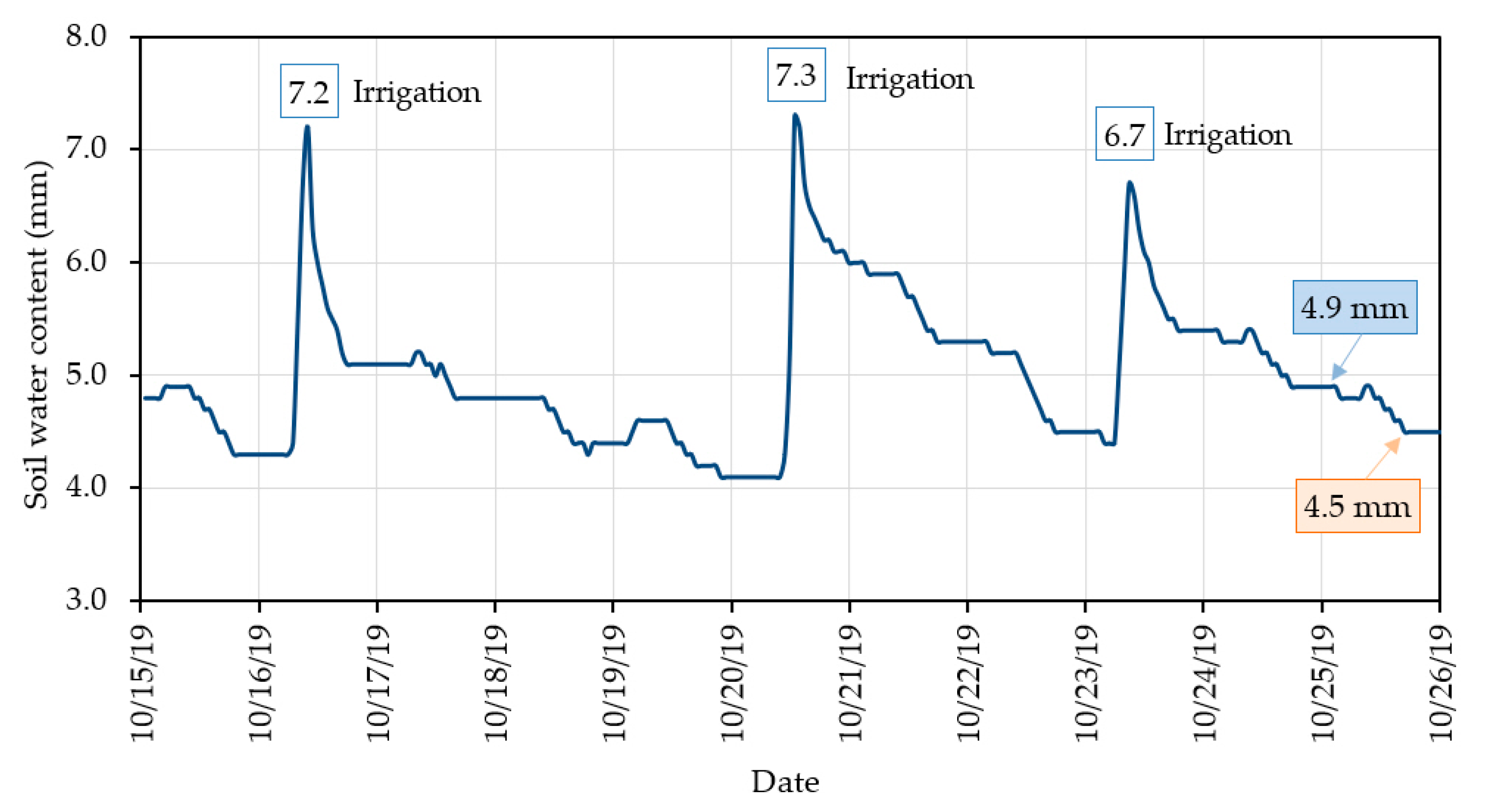
3.2.2. Measurements in the Root Zone
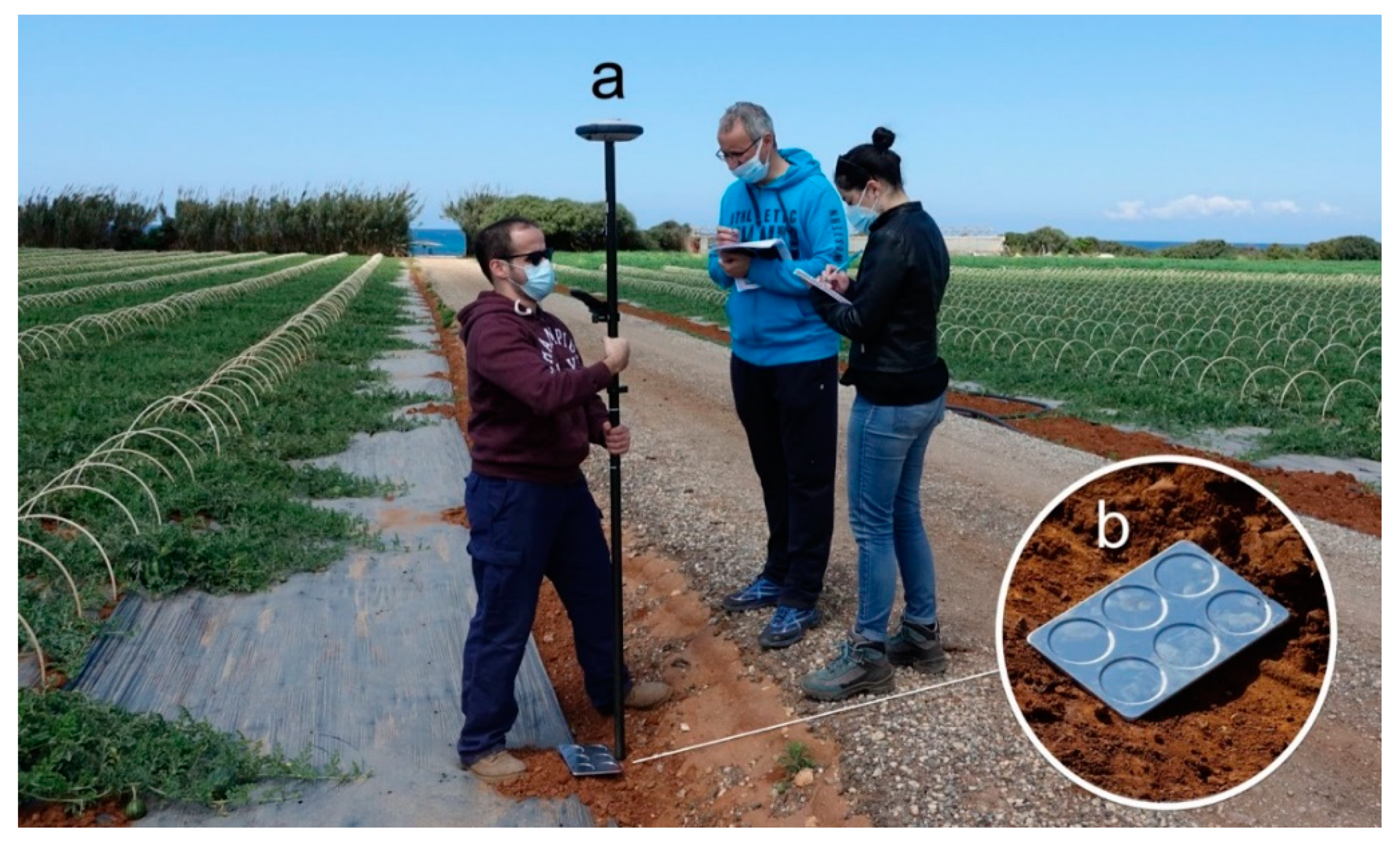
3.2.3. Data Acquisition System and Telemetry
3.3. Experimental Design—Unmanned Aerial Vehicle, Cameras, and IR-TH
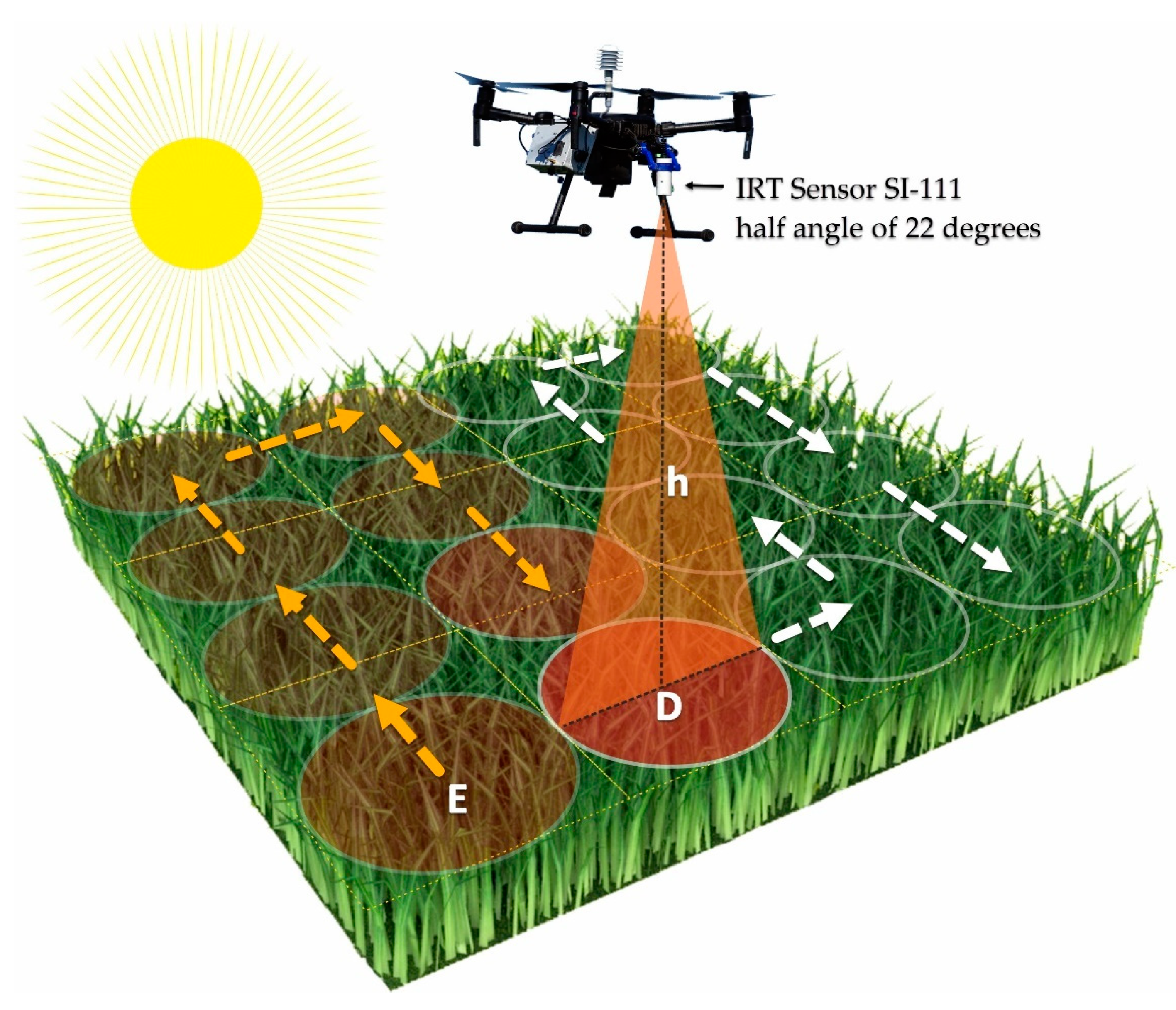
3.3.1. UAV for IR Spatial Row Data Measurements
3.3.2. UAVs for Photogrammetric, Multispectral, and Thermal Measurements
4. Preliminary Results and Discussion
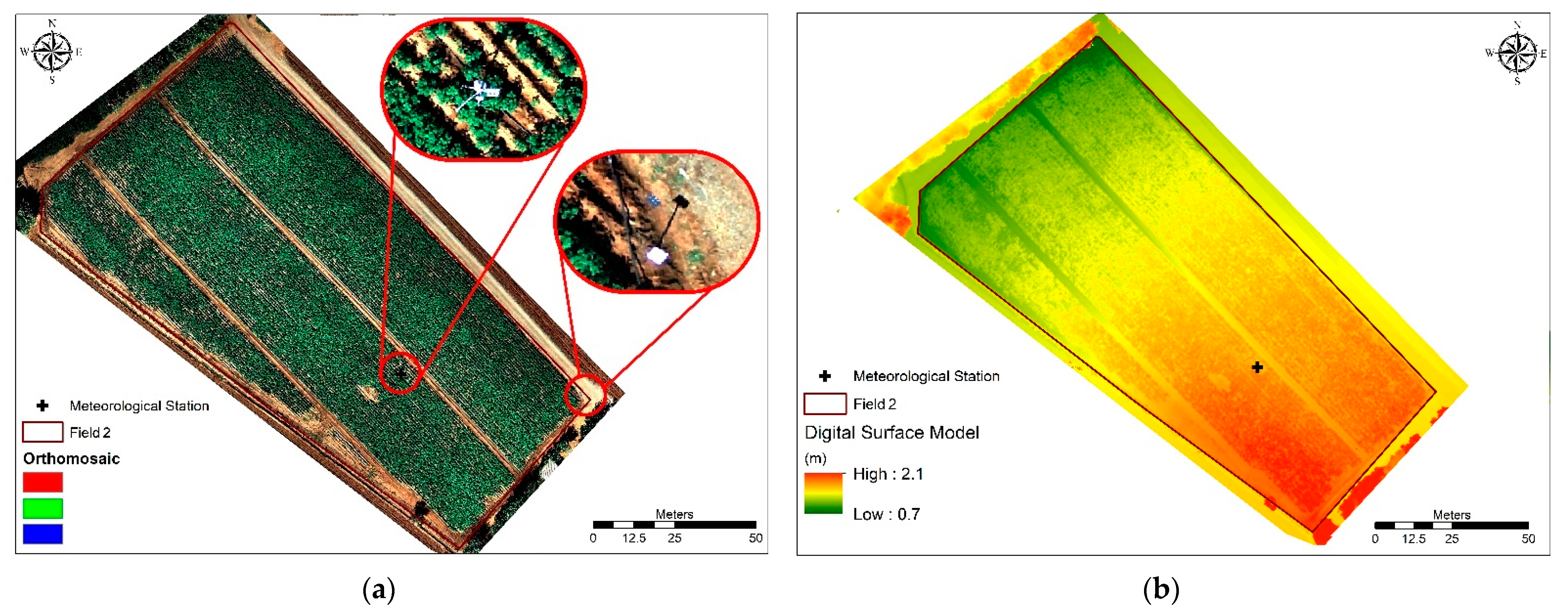
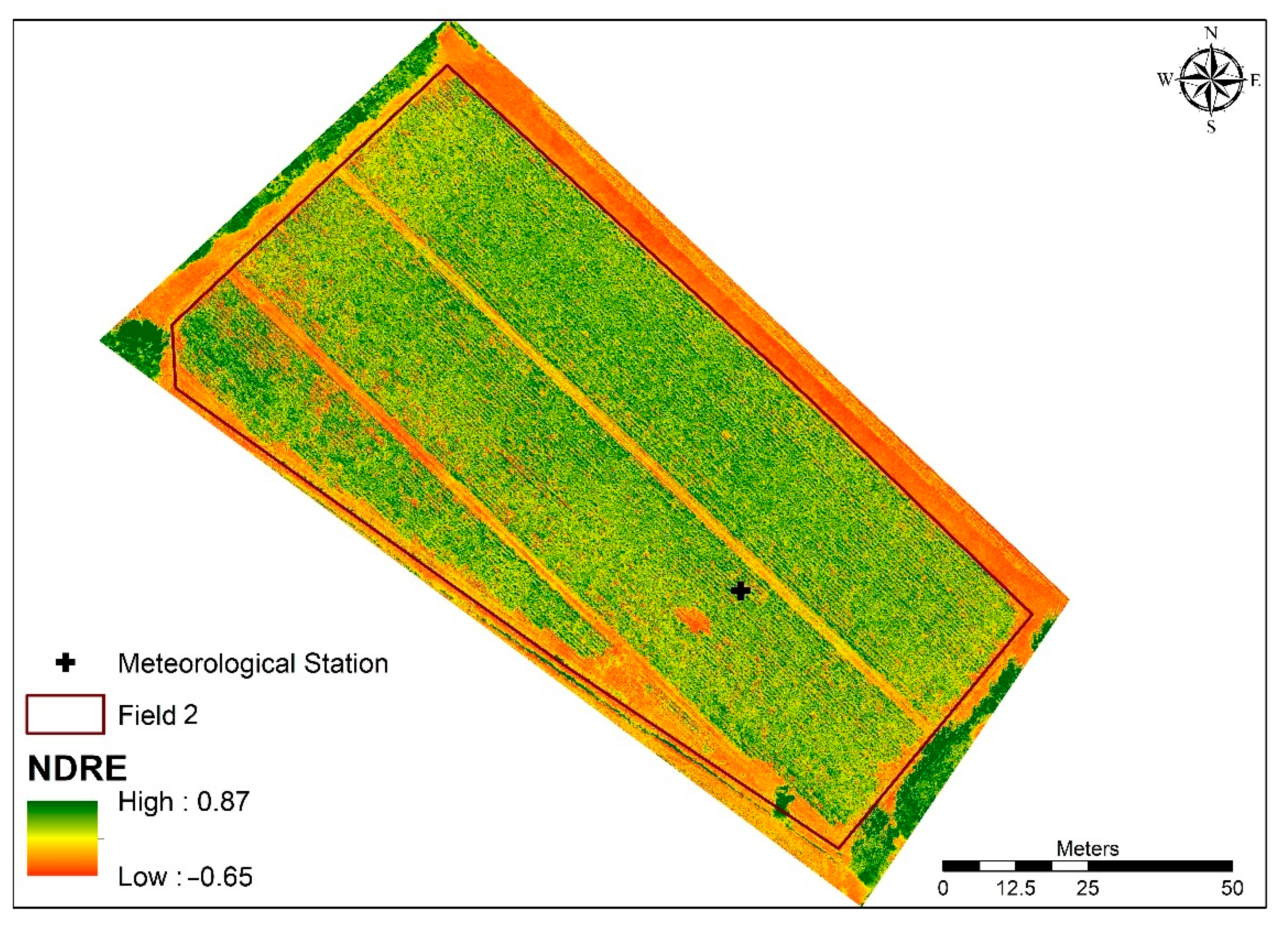
4.1. Photogrammetry—Multispectral and Thermal Imagery
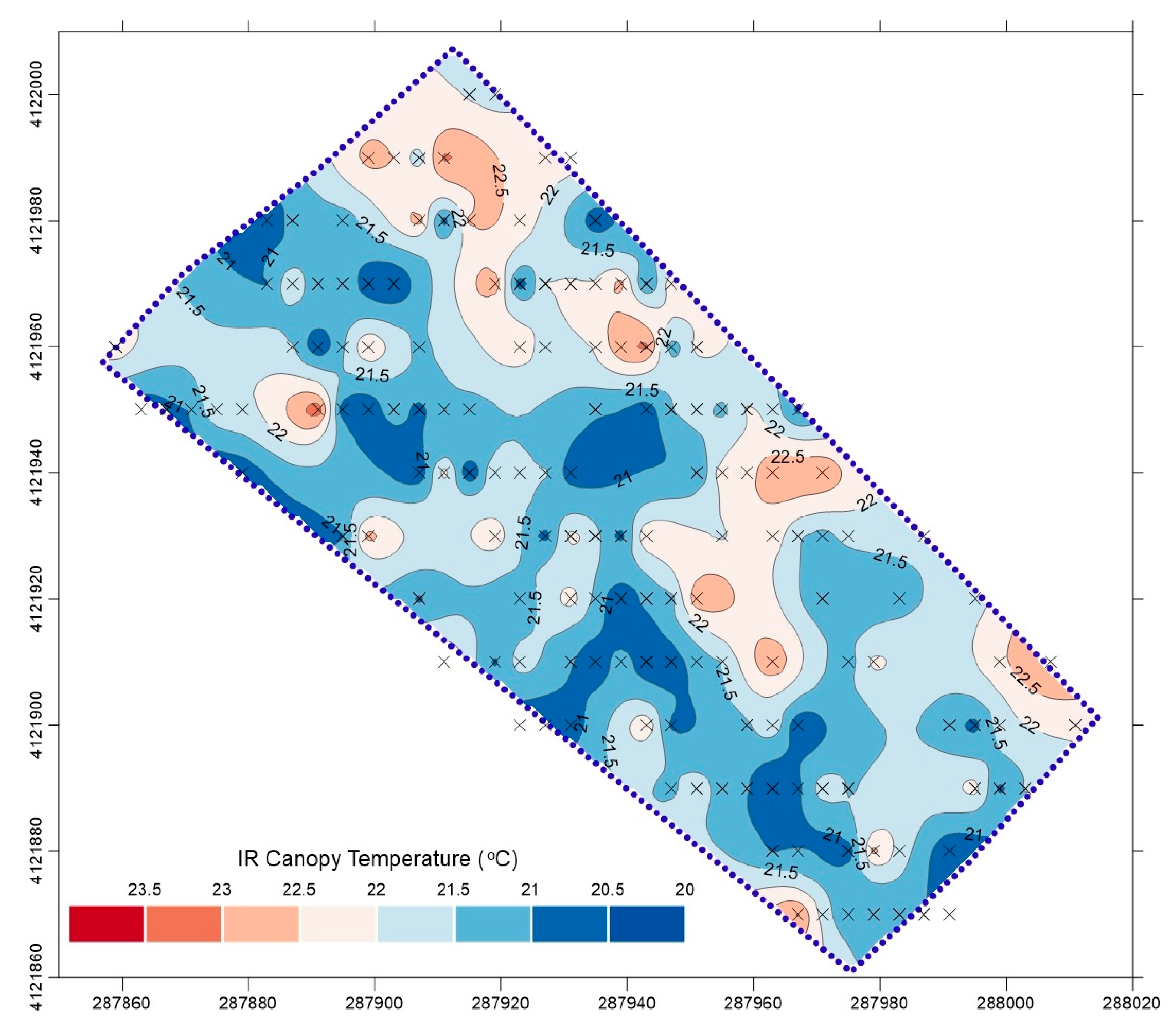
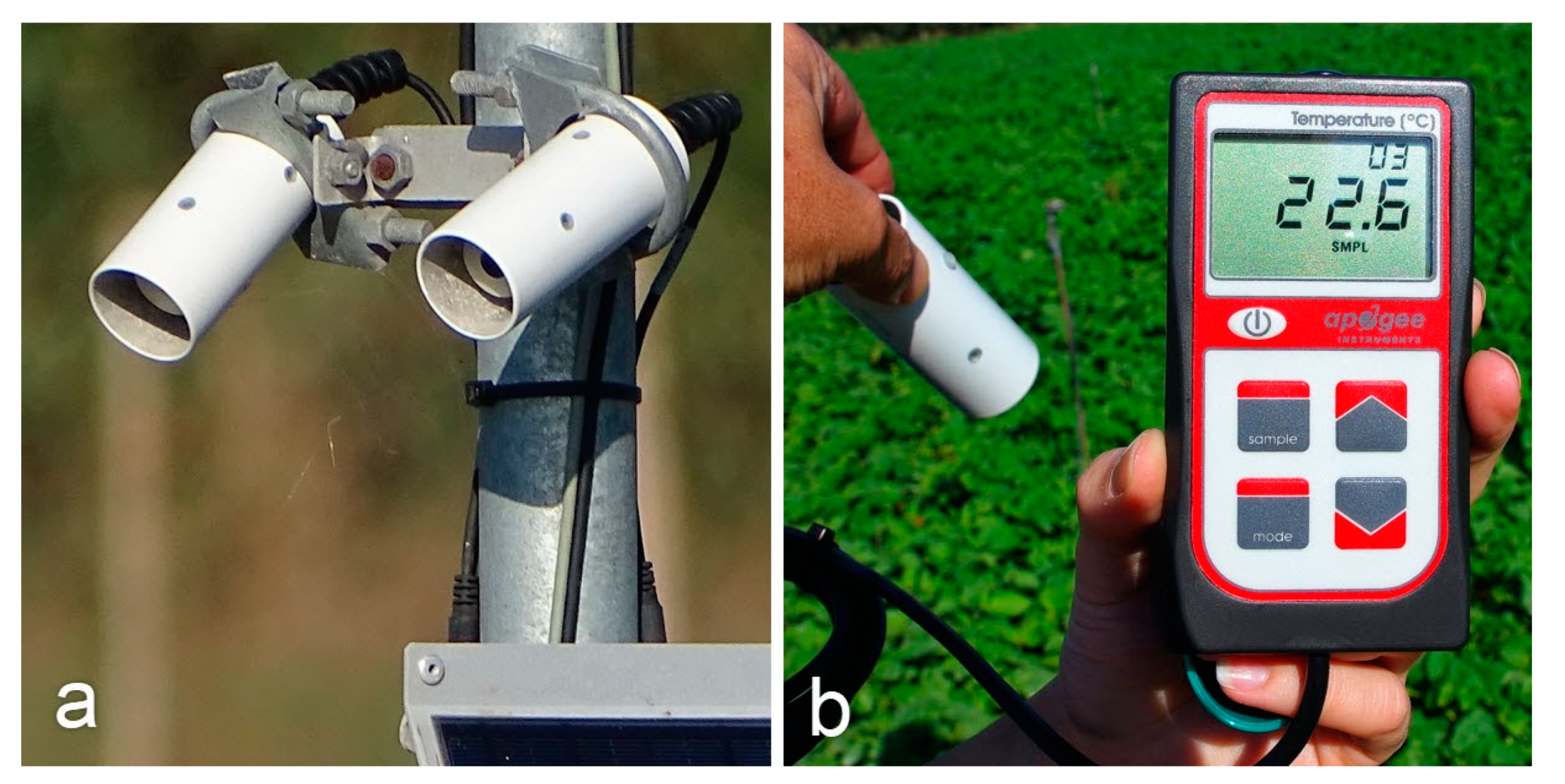
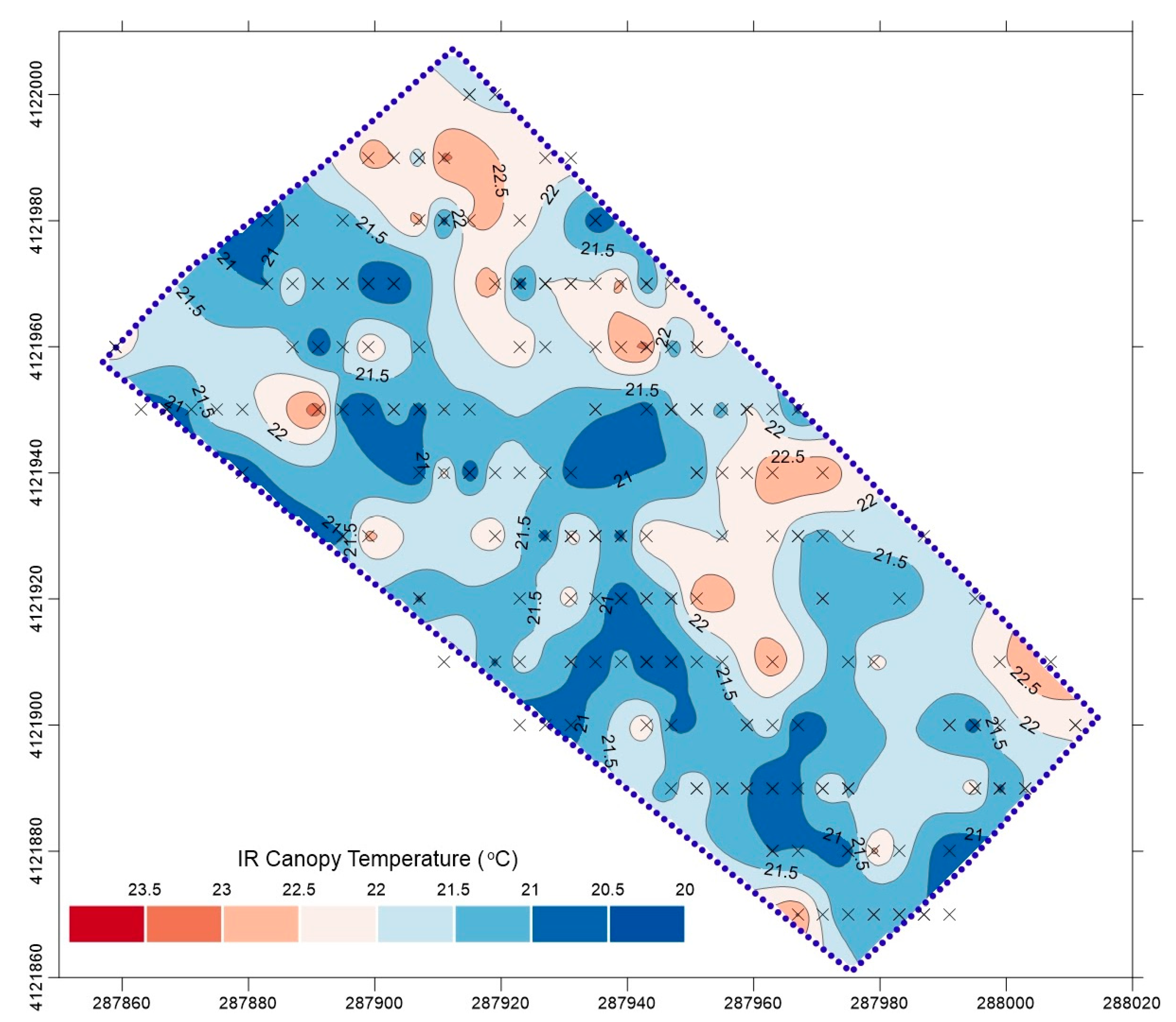
4.2. Direct Canopy IRT Measurements and Spatial CWSI Estimation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bin Abdullah, K. Use of water and land for food security and environmental sustainability. Irrig. Drain. 2006, 55, 219–222. [Google Scholar] [CrossRef]
- Mulla, D.; Miao, Y. Precision Farming; CRC Press: Boca Raton, FL, USA, 2015; pp. 161–178. [Google Scholar]
- Yang, Y.; Shang, S.; Jiang, L. Remote sensing temporal and spatial patterns of evapotranspiration and the responses to water management in a large irrigation district of North China. Agric. For. Meteorol. 2012, 164, 112–122. [Google Scholar] [CrossRef]
- Peña-Arancibia, J.L.; Mainuddin, M.; Kirby, J.M.; Chiew, F.H.S.; McVicar, T.R.; Vaze, J. Assessing irrigated agriculture’s surface water and groundwater consumption by combining satellite remote sensing and hydrologic modelling. Sci. Total Environ. 2016, 542, 372–382. [Google Scholar] [CrossRef] [PubMed]
- Vecchio, Y.; De Rosa, M.; Adinolfi, F.; Bartoli, L.; Masi, M. Adoption of precision farming tools: A context-related analysis. Land Use Policy 2020, 94, 104481. [Google Scholar] [CrossRef]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A review on UAV-based applications for precision agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef] [Green Version]
- Alexandris, S.; Proutsos, N. How significant is the effect of the surface characteristics on the Reference Evapotranspiration estimates? Agric. Water Manag. 2020, 237, 106181. [Google Scholar] [CrossRef]
- Egea, G.; Padilla-Díaz, C.M.; Martinez-Guanter, J.; Fernández, J.E.; Pérez-Ruiz, M. Assessing a crop water stress index derived from aerial thermal imaging and infrared thermometry in super-high density olive orchards. Agric. Water Manag. 2017, 187, 210–221. [Google Scholar] [CrossRef] [Green Version]
- Xie, Y.; Sha, Z.; Yu, M. Remote sensing imagery in vegetation mapping: A review. J. Plant. Ecol. 2008, 1, 9–23. [Google Scholar] [CrossRef]
- Kavvadias, A.; Psomiadis, E.; Chanioti, M.; Gala, E.; Michas, S. Precision agriculture—Comparison and evaluation of innovative very high resolution (UAV) and LandSat data. In Proceedings of the 7th International Conference on Information and Communication Technologies in Agriculture, Food and Environment (HAICTA 2015), Kavala, Greece, 17–20 September 2015; Volume 1498. [Google Scholar]
- Kavvadias, A.; Psomiadis, E.; Chanioti, M.; Tsitouras, A.; Toulios, L.; Dercas, N. Unmanned Aerial Vehicle (UAV) data analysis for fertilization dose assessment. In Proceedings of the SPIE—Remote Sensing for Agriculture, Ecosystems, and Hydrology XIX, Warsaw, Poland, 11–14 September 2017; Volume 10421. [Google Scholar]
- Gago, J.; Douthe, C.; Coopman, R.E.; Gallego, P.P.; Ribas-Carbo, M.; Flexas, J.; Escalona, J.; Medrano, H. UAVs challenge to assess water stress for sustainable agriculture. Agric. Water Manag. 2015, 153, 9–19. [Google Scholar] [CrossRef]
- Jones, H.; Sirault, X. Scaling of Thermal Images at Different Spatial Resolution: The Mixed Pixel Problem. Agronomy 2014, 4, 380–396. [Google Scholar] [CrossRef] [Green Version]
- Nahry, A.H.E.; Ali, R.R.; Baroudy, A.A.E. An approach for precision farming under pivot irrigation system using remote sensing and GIS techniques. Agric. Water Manag. 2011, 98, 517–531. [Google Scholar] [CrossRef]
- Anderson, K.; Gaston, K.J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Front. Ecol. Environ. 2013, 11, 138–146. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Niu, Y.; Zhang, H.; Han, W.; Li, G.; Tang, J.; Peng, X. Maize Canopy Temperature Extracted From UAV Thermal and RGB Imagery and Its Application in Water Stress Monitoring. Front. Plant. Sci. 2019, 10, 1270. [Google Scholar] [CrossRef]
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Rud, R.; Cohen, Y.; Alchanatis, V.; Levi, A.; Brikman, R.; Shenderey, C.; Heuer, B.; Markovitch, T.; Dar, Z.; Rosen, C.; et al. Crop water stress index derived from multi-year ground and aerial thermal images as an indicator of potato water status. Precis. Agric. 2014, 15, 273–289. [Google Scholar] [CrossRef]
- Cucho-Padin, G.; Rinza, J.; Ninanya, J.; Loayza, H.; Quiroz, R.; Ramírez, D.A. Development of an Open-Source Thermal Image Processing Software for Improving Irrigation Management in Potato Crops (Solanum tuberosum L.). Sensors 2020, 20, 472. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Veysi, S.; Naseri, A.A.; Hamzeh, S.; Bartholomeus, H. A satellite based crop water stress index for irrigation scheduling in sugarcane fields. Agric. Water Manag. 2017, 189, 70–86. [Google Scholar] [CrossRef]
- Lebourgeois, V.; Labbé, S.; Jacob, F.; Bégué, A. Atmospheric corrections of low altitude thermal infrared airborne images acquired over a tropical cropped area. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Boston, MA, USA, 7–11 July 2008; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2008; Volume 3, pp. 672–675. [Google Scholar]
- da Silva, B.B.; Ferreira, J.A.; Rammana, T.V.; Rodríguez, V.P. Crop Water Stress Index and Water-Use Efficiency for Melon (Cucumis melo L.) on Different Irrigation Regimes. Agric. J. 2007, 2, 31–37. [Google Scholar]
- Sepulcre-Cantó, G.; Zarco-Tejada, P.J.; Jiménez-Muñoz, J.C.; Sobrino, J.A.; De Miguel, E.; Villalobos, F.J. Detection of water stress in an olive orchard with thermal remote sensing imagery. Agric. For. Meteorol. 2006, 136, 31–44. [Google Scholar] [CrossRef]
- Gutiérrez, S.; Diago, M.P.; Fernández-Novales, J.; Tardaguila, J. Vineyard water status assessment using on-the-go thermal imaging and machine learning. PLoS ONE 2018, 13, e0192037. [Google Scholar] [CrossRef]
- Baluja, J.; Diago, M.P.; Balda, P.; Zorer, R.; Meggio, F.; Morales, F.; Tardaguila, J. Assessment of vineyard water status variability by thermal and multispectral imagery using an unmanned aerial vehicle (UAV). Irrig. Sci. 2012, 30, 511–522. [Google Scholar] [CrossRef]
- Moller, M.; Alchanatis, V.; Cohen, Y.; Meron, M.; Tsipris, J.; Naor, A.; Ostrovsky, V.; Sprintsin, M.; Cohen, S. Use of thermal and visible imagery for estimating crop water status of irrigated grapevine. J. Exp. Bot. 2006, 58, 827–838. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Zhang, H.; Niu, Y.; Han, W. Mapping Maize Water Stress Based on UAV Multispectral Remote Sensing. Remote Sens. 2019, 11, 605. [Google Scholar] [CrossRef] [Green Version]
- Yang, W.; Li, C.; Yang, H.; Yang, G.; Feng, H.; Han, L.; Niu, Q.; Han, D. Monitoring of canopy temperature of maize based on UAV thermal infrared imagery and digital imagery. Nongye Gongcheng Xuebao/Trans. Chin. Soc. Agric. Eng. 2018, 34, 68–75. [Google Scholar] [CrossRef]
- Gonzalez-Dugo, V.; Zarco-Tejada, P.; Nicolás, E.; Nortes, P.A.; Alarcón, J.J.; Intrigliolo, D.S.; Fereres, E. Using high resolution UAV thermal imagery to assess the variability in the water status of five fruit tree species within a commercial orchard. Precis. Agric. 2013, 14, 660–678. [Google Scholar] [CrossRef]
- Bellvert, J.; Zarco-Tejada, P.J.; Girona, J.; Fereres, E. Mapping crop water stress index in a “Pinot-noir” vineyard: Comparing ground measurements with thermal remote sensing imagery from an unmanned aerial vehicle. Precis. Agric. 2014, 15, 361–376. [Google Scholar] [CrossRef]
- Berni, J.A.J.; Zarco-Tejada, P.J.; Suárez, L.; Fereres, E. Thermal and narrowband multispectral remote sensing for vegetation monitoring from an unmanned aerial vehicle. IEEE Trans. Geosci. Remote Sens. 2009, 47, 722–738. [Google Scholar] [CrossRef] [Green Version]
- Matese, A.; Baraldi, R.; Berton, A.; Cesaraccio, C.; Di Gennaro, S.; Duce, P.; Facini, O.; Mameli, M.; Piga, A.; Zaldei, A. Estimation of Water Stress in Grapevines Using Proximal and Remote Sensing Methods. Remote Sens. 2018, 10, 114. [Google Scholar] [CrossRef] [Green Version]
- Santesteban, L.G.; Di Gennaro, S.F.; Herrero-Langreo, A.; Miranda, C.; Royo, J.B.; Matese, A. High-resolution UAV-based thermal imaging to estimate the instantaneous and seasonal variability of plant water status within a vineyard. Agric. Water Manag. 2017, 183, 49–59. [Google Scholar] [CrossRef]
- Jackson, R.D.; Idso, S.B.; Reginato, R.J.; Pinter, P.J. Canopy temperature as a crop water stress indicator. Water Resour. Res. 1981, 17, 1133–1138. [Google Scholar] [CrossRef]
- Idso, S.B.; Jackson, R.D.; Pinter, P.J.; Reginato, R.J.; Hatfield, J.L. Normalizing the stress-degree-day parameter for environmental variability. Agric. Meteorol. 1981, 24, 45–55. [Google Scholar] [CrossRef]
- Jackson, R.D.; Kustas, W.P.; Choudhury, B.J. A reexamination of the crop water stress index. Irrig. Sci. 1988, 9, 309–317. [Google Scholar] [CrossRef]
- Awais, M.; Li, W.; Cheema, M.J.M.; Hussain, S.; AlGarni, T.S.; Liu, C.; Ali, A. Remotely sensed identification of canopy characteristics using UAV-based imagery under unstable environmental conditions. Environ. Technol. Innov. 2021, 22, 101465. [Google Scholar] [CrossRef]
- Mwinuka, P.R.; Mbilinyi, B.P.; Mbungu, W.B.; Mourice, S.K.; Mahoo, H.F.; Schmitter, P. The feasibility of hand-held thermal and UAV-based multispectral imaging for canopy water status assessment and yield prediction of irrigated African eggplant (Solanum aethopicum L.). Agric. Water Manag. 2021, 245, 106584. [Google Scholar] [CrossRef]
- Shao, G.; Han, W.; Zhang, H.; Liu, S.; Wang, Y.; Zhang, L.; Cui, X. Mapping maize crop coefficient Kc using random forest algorithm based on leaf area index and UAV-based multispectral vegetation indices. Agric. Water Manag. 2021, 252, 106906. [Google Scholar] [CrossRef]
- Zhou, Z.; Majeed, Y.; Diverres Naranjo, G.; Gambacorta, E.M.T. Assessment for crop water stress with infrared thermal imagery in precision agriculture: A review and future prospects for deep learning applications. Comput. Electron. Agric. 2021, 182, 106019. [Google Scholar] [CrossRef]
- de Castro, A.I.; Shi, Y.; Maja, J.M.; Peña, J.M. UAVs for Vegetation Monitoring: Overview and Recent Scientific Contributions. Remote Sens. 2021, 13, 2139. [Google Scholar] [CrossRef]
- Han, Y.; Tarakey, B.A.; Hong, S.-J.; Kim, S.-Y.; Kim, E.; Lee, C.-H.; Kim, G. Calibration and Image Processing of Aerial Thermal Image for UAV Application in Crop Water Stress Estimation. J. Sens. 2021, 2021, 1–14. [Google Scholar] [CrossRef]
- Zhang, L.; Han, W.; Niu, Y.; Chávez, J.L.; Shao, G.; Zhang, H. Evaluating the sensitivity of water stressed maize chlorophyll and structure based on UAV derived vegetation indices. Comput. Electron. Agric. 2021, 185, 106174. [Google Scholar] [CrossRef]
- Irmak, S.; Haman, D.Z.; Bastug, R. Determination of Crop Water Stress Index for Irrigation Timing and Yield Estimation of Corn. Agron. J. 2000, 92, 1221–1227. [Google Scholar] [CrossRef]
- Thom, A.S. Momentum, mass and heat exchange of vegetation. Q. J. R. Meteorol. Soc. 1972, 98, 124–134. [Google Scholar] [CrossRef]
- Monteith, J.; Unsworth, M. Principles of Environmental Physics: Plants, Animals, and the Atmosphere; Academic Press: Cambridge, MA, USA, 2013. [Google Scholar]
- Brutsaert, W. Evaporation into the Atmosphere: Theory, History and Applications; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Clothier, B.E.; Clawson, K.L.; Pinter, P.J.; Moran, M.S.; Reginato, R.J.; Jackson, R.D. Estimation of soil heat flux from net radiation during the growth of alfalfa. Agric. For. Meteorol. 1986, 37, 319–329. [Google Scholar] [CrossRef]
- Thom, A.S.; Oliver, H.R. On Penman’s equation for estimating regional evaporation. Q. J. R. Meteorol. Soc. 1977, 103, 345–357. [Google Scholar] [CrossRef]
- Thornthwaite, C.W. An Approach toward a Rational Classification of Climate. Geogr. Rev. 1948, 38, 55. [Google Scholar] [CrossRef]
- Tsiros, I.X.; Nastos, P.; Proutsos, N.D.; Tsaousidis, A. Variability of the aridity index and related drought parameters in Greece using climatological data over the last century (1900–1997). Atmos. Res. 2020, 240, 104914. [Google Scholar] [CrossRef]
- McEvoy, J.F.; Hall, G.P.; Mcdonald, P.G. Evaluation of unmanned aerial vehicle shape, flight path and camera type for waterfowl surveys: Disturbance effects and species recognition. PeerJ 2016, 4, e1831. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mouazen, A.M.; Alexandridis, T.; Buddenbaum, H.; Cohen, Y.; Moshou, D.; Mulla, D.; Nawar, S.; Sudduth, K.A. Monitoring. In Agricultural Internet of Things and Decision Support for Precision Smart Farming; Elsevier Inc.: Amsterdam, The Netherlands, 2020; pp. 35–138. ISBN 9780128183731. [Google Scholar]
- Verhoeven, G.; Doneus, M.; Briese, C.; Vermeulen, F. Mapping by matching: A computer vision-based approach to fast and accurate georeferencing of archaeological aerial photographs. J. Archaeol. Sci. 2012, 39, 2060–2070. [Google Scholar] [CrossRef]
- Alexiou, S.; Deligiannakis, G.; Pallikarakis, A.; Papanikolaou, I.; Psomiadis, E.; Reicherter, K. Comparing High Accuracy t-LiDAR and UAV-SfM Derived Point Clouds for Geomorphological Change Detection. ISPRS Int. J. Geo-Inf. 2021, 10, 367. [Google Scholar] [CrossRef]
- Kung, O.; Strecha, C.; Beyeler, A.; Zufferey, J.-C.; Floreano, D.; Fua, P.; Gervaix, F. The accuracy of automatic photogrammetric techniques on ultra-light UAV imagery. In Proceedings of the UAV-g 2011—Unmanned Aerial Vehicle in Geomatics, Zürich, Switzerland, 14–16 September 2011. [Google Scholar]
- Darra, N.; Psomiadis, E.; Kasimati, A.; Anastasiou, A.; Anastasiou, E.; Fountas, S. Remote and Proximal Sensing-Derived Spectral Indices and Biophysical Variables for Spatial Variation Determination in Vineyards. Agronomy 2021, 11, 741. [Google Scholar] [CrossRef]
- Andriolo, U.; Gonçalves, G.; Bessa, F.; Sobral, P. Mapping marine litter on coastal dunes with unmanned aerial systems: A showcase on the Atlantic Coast. Sci. Total Environ. 2020, 736, 139632. [Google Scholar] [CrossRef] [PubMed]
- Rud, R.; Shoshany, M.; Alchanatis, V. Spatial-spectral processing strategies for detection of salinity effects in cauliflower, aubergine and kohlrabi. Biosyst. Eng. 2013, 114, 384–396. [Google Scholar] [CrossRef]
- Melis, M.T.; Da Pelo, S.; Erbì, I.; Loche, M.; Deiana, G.; Demurtas, V.; Meloni, M.A.; Dessì, F.; Funedda, A.; Scaioni, M.; et al. Thermal remote sensing from UAVs: A review on methods in coastal cliffs prone to landslides. Remote Sens. 2020, 12, 1971. [Google Scholar] [CrossRef]
- Processing Thermal Images—Support. Available online: https://support.pix4d.com/hc/en-us/articles/360000173463-Processing-thermal-images (accessed on 15 June 2021).
- López, A.; Jurado, J.M.; Ogayar, C.J.; Feito, F.R. A framework for registering UAV-based imagery for crop-tracking in Precision Agriculture. Int. J. Appl. Earth Obs. Geoinf. 2021, 97, 102274. [Google Scholar] [CrossRef]
- Bellvert, J.; Zarco-Tejada, P.J.; Marsal, J.; Girona, J.; González-Dugo, V.; Fereres, E. Vineyard irrigation scheduling based on airborne thermal imagery and water potential thresholds. Aust. J. Grape Wine Res. 2016, 22, 307–315. [Google Scholar] [CrossRef] [Green Version]
- García-Tejero, I.F.; Costa, J.M.; Egipto, R.; Durán-Zuazo, V.H.; Lima, R.S.N.; Lopes, C.M.; Chaves, M.M. Thermal data to monitor crop-water status in irrigated Mediterranean viticulture. Agric. Water Manag. 2016, 176, 80–90. [Google Scholar] [CrossRef]
- Tang, Z.; Parajuli, A.; Chen, C.J.; Hu, Y.; Revolinski, S.; Medina, C.A.; Lin, S.; Zhang, Z.; Yu, L.X. Validation of UAV-based alfalfa biomass predictability using photogrammetry with fully automatic plot segmentation. Sci. Rep. 2021, 11, 3336. [Google Scholar] [CrossRef] [PubMed]
- Bian, J.; Zhang, Z.; Chen, J.; Chen, H.; Cui, C.; Li, X.; Chen, S.; Fu, Q. Simplified Evaluation of Cotton Water Stress Using High Resolution Unmanned Aerial Vehicle Thermal Imagery. Remote Sens. 2019, 11, 267. [Google Scholar] [CrossRef] [Green Version]
- Sagan, V.; Maimaitijiang, M.; Sidike, P.; Eblimit, K.; Peterson, K.; Hartling, S.; Esposito, F.; Khanal, K.; Newcomb, M.; Pauli, D.; et al. UAV-Based High Resolution Thermal Imaging for Vegetation Monitoring, and Plant Phenotyping Using ICI 8640 P, FLIR Vue Pro R 640, and thermoMap Cameras. Remote Sens. 2019, 11, 330. [Google Scholar] [CrossRef] [Green Version]
- Vamvakoulas, C.; Argyrokastritis, I.; Papastylianou, P.; Papatheohari, Y.; Alexandris, S. Crop water stress index relationship with soybean seed, protein and oil yield under varying irrigation regimes in a Mediterranean environment. Isr. J. Plant. Sci. 2020, 67, 1–13. [Google Scholar] [CrossRef]
- Cohen, Y.; Alchanatis, V.; Sela, E.; Saranga, Y.; Cohen, S.; Meron, M.; Bosak, A.; Tsipris, J.; Ostrovsky, V.; Orolov, V.; et al. Crop water status estimation using thermography: Multi-year model development using ground-based thermal images. Precis. Agric. 2015, 16, 311–329. [Google Scholar] [CrossRef]
- Cohen, Y.; Alchanatis, V.; Saranga, Y.; Rosenberg, O.; Sela, E.; Bosak, A. Mapping water status based on aerial thermal imagery: Comparison of methodologies for upscaling from a single leaf to commercial fields. Precis. Agric. 2017, 18, 801–822. [Google Scholar] [CrossRef]
- Berni, J.A.J.; Zarco-Tejada, P.J.; Sepulcre-Cantó, G.; Fereres, E.; Villalobos, F. Mapping canopy conductance and CWSI in olive orchards using high resolution thermal remote sensing imagery. Remote Sens. Environ. 2009, 113, 2380–2388. [Google Scholar] [CrossRef]
- Thomson, S.J.; Ouellet-Plamondon, C.M.; DeFauw, S.L.; Huang, Y.; Fisher, D.K.; English, P.J. Potential and Challenges in Use of Thermal Imaging for Humid Region Irrigation System Management. J. Agric. Sci. 2012, 4, p103. [Google Scholar] [CrossRef]
- Khanal, S.; Fulton, J.; Shearer, S. An overview of current and potential applications of thermal remote sensing in precision agriculture. Comput. Electron. Agric. 2017, 139, 22–32. [Google Scholar] [CrossRef]
- Fuchs, M.; Kanemasu, E.T.; Kerr, J.P.; Tanner, C.B. Effect of Viewing Angle on Canopy Temperature Measurements with Infrared Thermometers. Agron. J. 1967, 59, 494–496. [Google Scholar] [CrossRef]
- Alchanatis, V.; Cohen, Y.; Cohen, S.; Moller, M.; Sprinstin, M.; Meron, M.; Tsipris, J.; Saranga, Y.; Sela, E. Evaluation of different approaches for estimating and mapping crop water status in cotton with thermal imaging. Precis. Agric. 2010, 11, 27–41. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Solar Time | Tair | IRT | RH | Wind Direction | Wind Speed | Solar Radiation | Net Radiation |
|---|---|---|---|---|---|---|---|
| (°C) | (%) | (°) | (ms−1) | (Wm−2) | |||
| 12:15 | 23.9 | 23.4 | 66.6 | 314 | 1.6 | 675 | 399 |
| 12:25 | 24.0 | 24.0 | 64.1 | 320 | 1.5 | 667 | 394 |
| 12:35 | 24.1 | 24.2 | 62.2 | 320 | 1.2 | 665 | 393 |
| GMMS * | 24.0 | 23.9 | 64.3 | 318 | 1.4 | 669 | 395 |
| AMMS * | 24.3 | 21.8 | 56.0 | ||||
| Volumetric Soil Water Content (%) of the Soil Layer (in cm) | Soil Heat Flux | ||||||
|---|---|---|---|---|---|---|---|
| Time | 0–10 | 10–20 | 20–30 | 30–40 | 40–50 | 50–60 | (Wm−2) |
| 12:30 p.m. | 4.7 | 8.6 | 25.4 | 39.2 | 39.1 | 21.3 | 23.7 |
| 12:40 p.m. | 4.7 | 8.6 | 25.3 | 39.2 | 39.1 | 21.3 | 23.5 |
| 12:50 p.m. | 4.7 | 8.5 | 25.2 | 39.2 | 39.1 | 21.3 | 23.2 |
| Average | 4.7 | 8.6 | 25.3 | 39.2 | 39.1 | 21.3 | 23.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alexandris, S.; Psomiadis, E.; Proutsos, N.; Philippopoulos, P.; Charalampopoulos, I.; Kakaletris, G.; Papoutsi, E.-M.; Vassilakis, S.; Paraskevopoulos, A. Integrating Drone Technology into an Innovative Agrometeorological Methodology for the Precise and Real-Time Estimation of Crop Water Requirements. Hydrology 2021, 8, 131. https://doi.org/10.3390/hydrology8030131
Alexandris S, Psomiadis E, Proutsos N, Philippopoulos P, Charalampopoulos I, Kakaletris G, Papoutsi E-M, Vassilakis S, Paraskevopoulos A. Integrating Drone Technology into an Innovative Agrometeorological Methodology for the Precise and Real-Time Estimation of Crop Water Requirements. Hydrology. 2021; 8(3):131. https://doi.org/10.3390/hydrology8030131
Chicago/Turabian StyleAlexandris, Stavros, Emmanouil Psomiadis, Nikolaos Proutsos, Panos Philippopoulos, Ioannis Charalampopoulos, George Kakaletris, Eleni-Magda Papoutsi, Stylianos Vassilakis, and Antoniοs Paraskevopoulos. 2021. "Integrating Drone Technology into an Innovative Agrometeorological Methodology for the Precise and Real-Time Estimation of Crop Water Requirements" Hydrology 8, no. 3: 131. https://doi.org/10.3390/hydrology8030131
APA StyleAlexandris, S., Psomiadis, E., Proutsos, N., Philippopoulos, P., Charalampopoulos, I., Kakaletris, G., Papoutsi, E.-M., Vassilakis, S., & Paraskevopoulos, A. (2021). Integrating Drone Technology into an Innovative Agrometeorological Methodology for the Precise and Real-Time Estimation of Crop Water Requirements. Hydrology, 8(3), 131. https://doi.org/10.3390/hydrology8030131