An Algorithm to Extract the Boundary and Center of EUV Solar Image Based on Sobel Operator and FLICM

Abstract
1. Introduction
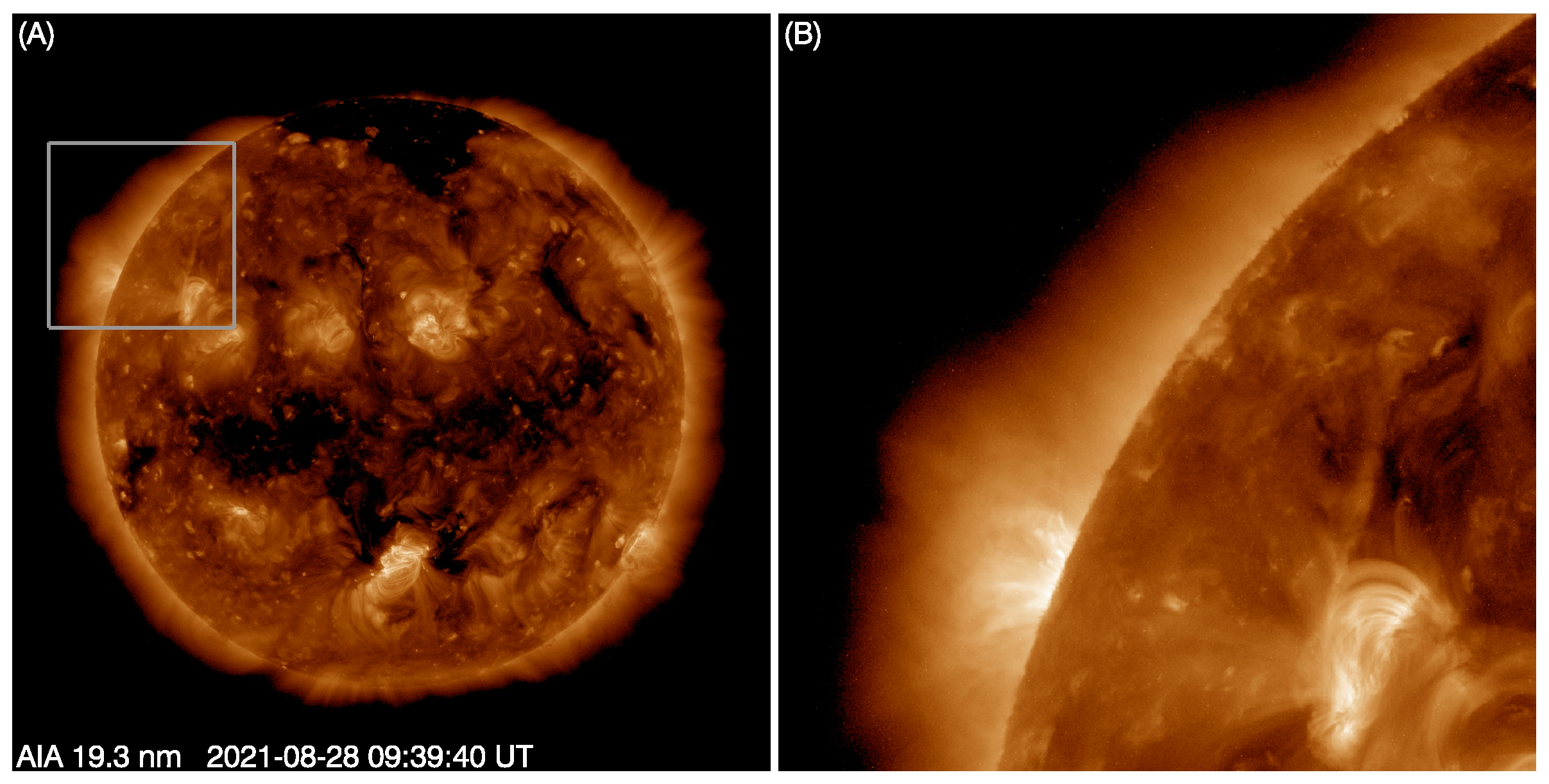
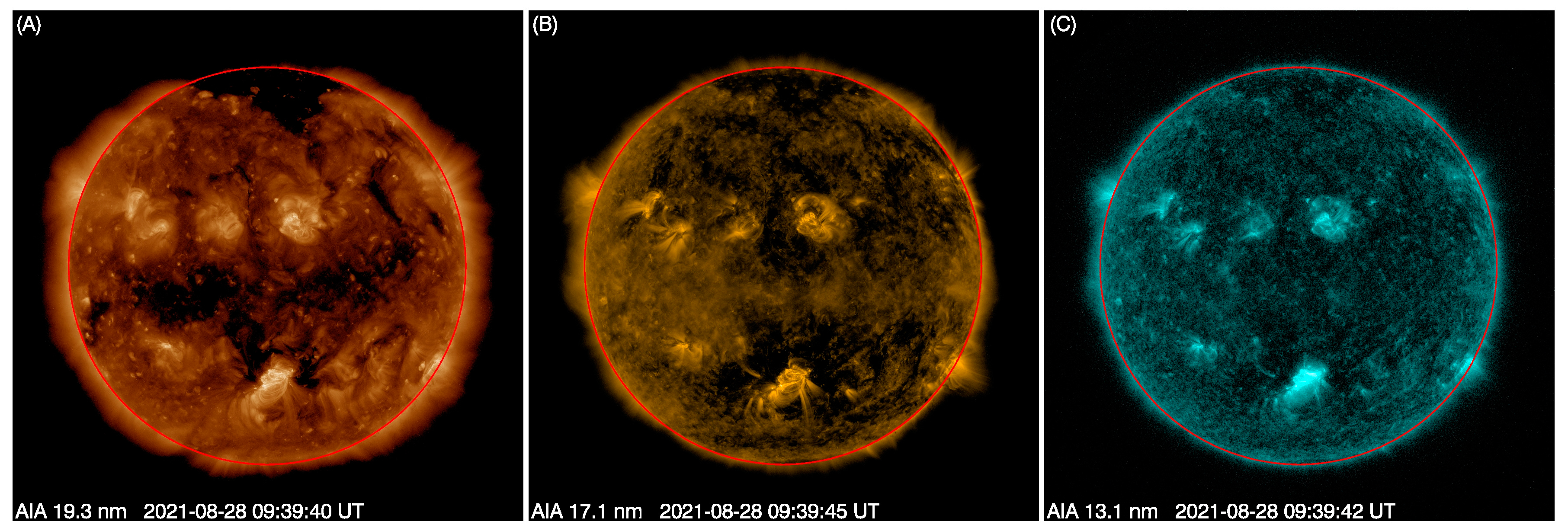
2. Data Sets
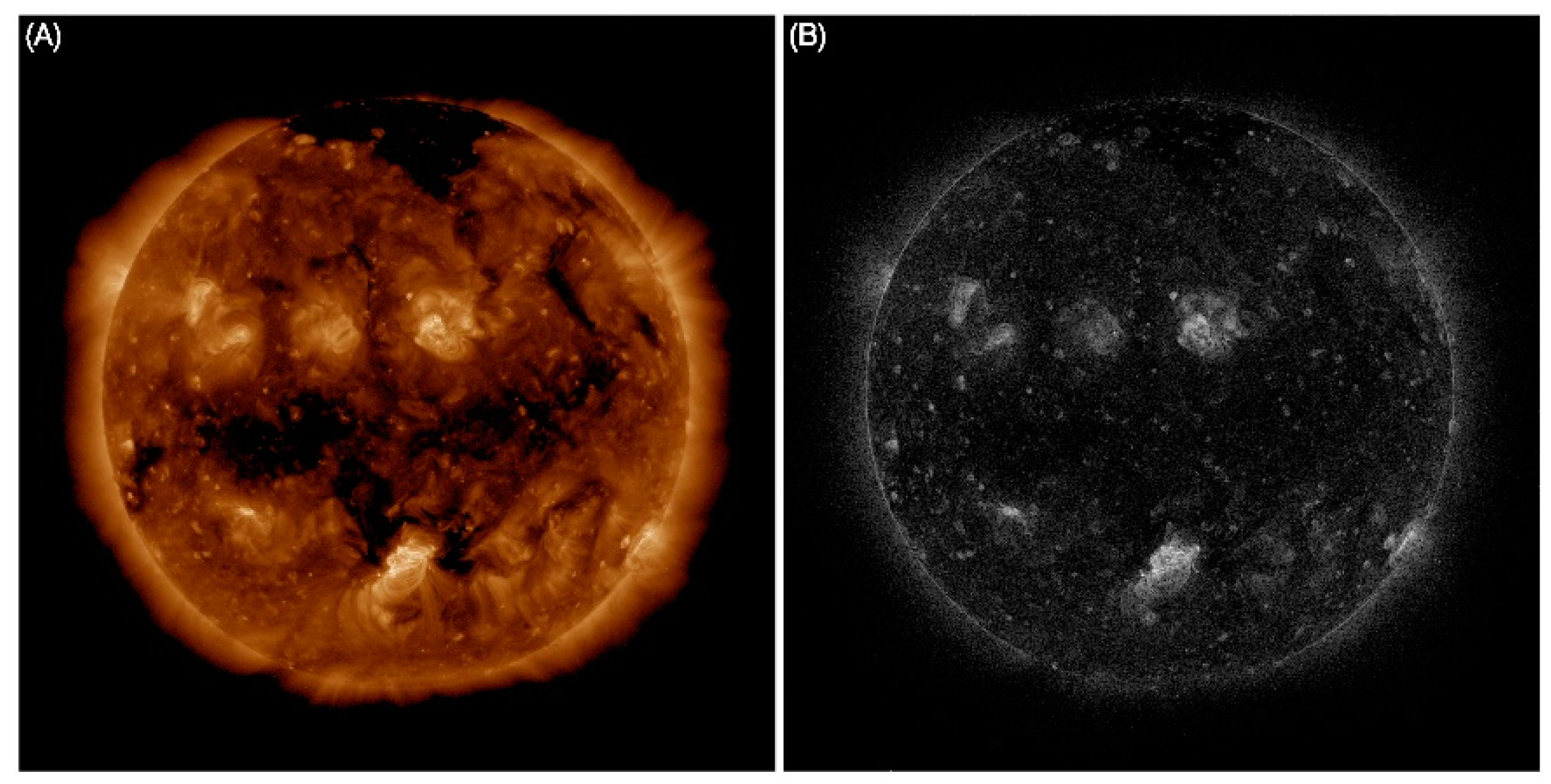
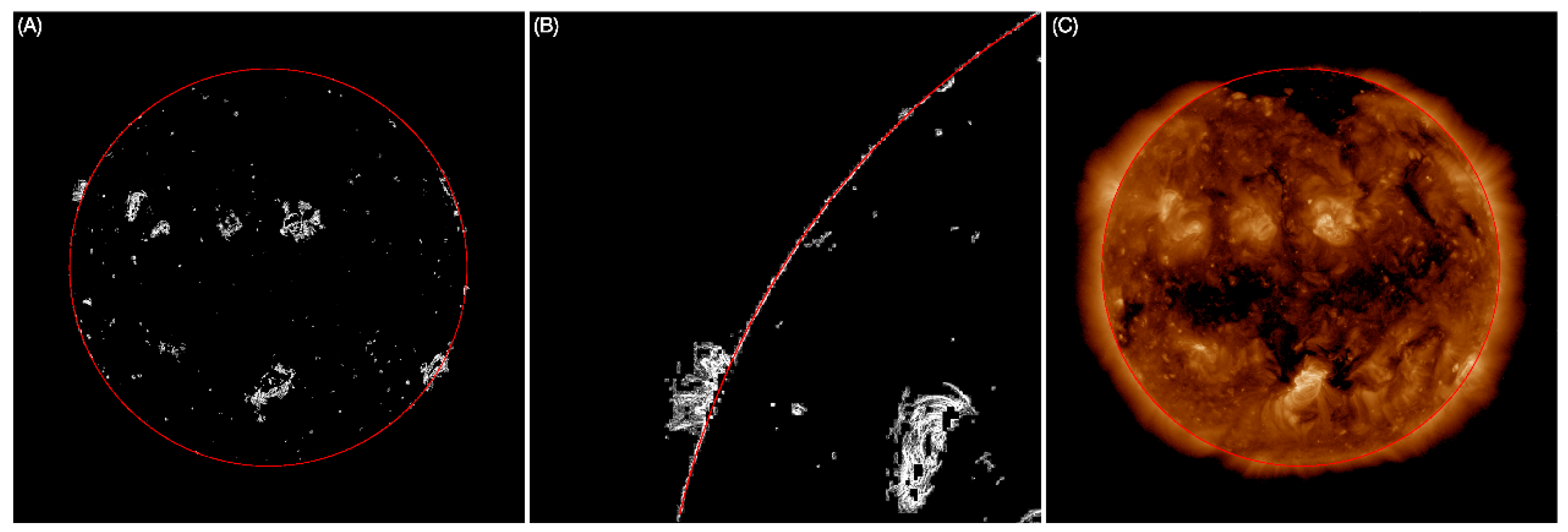
3. Sobel Operator
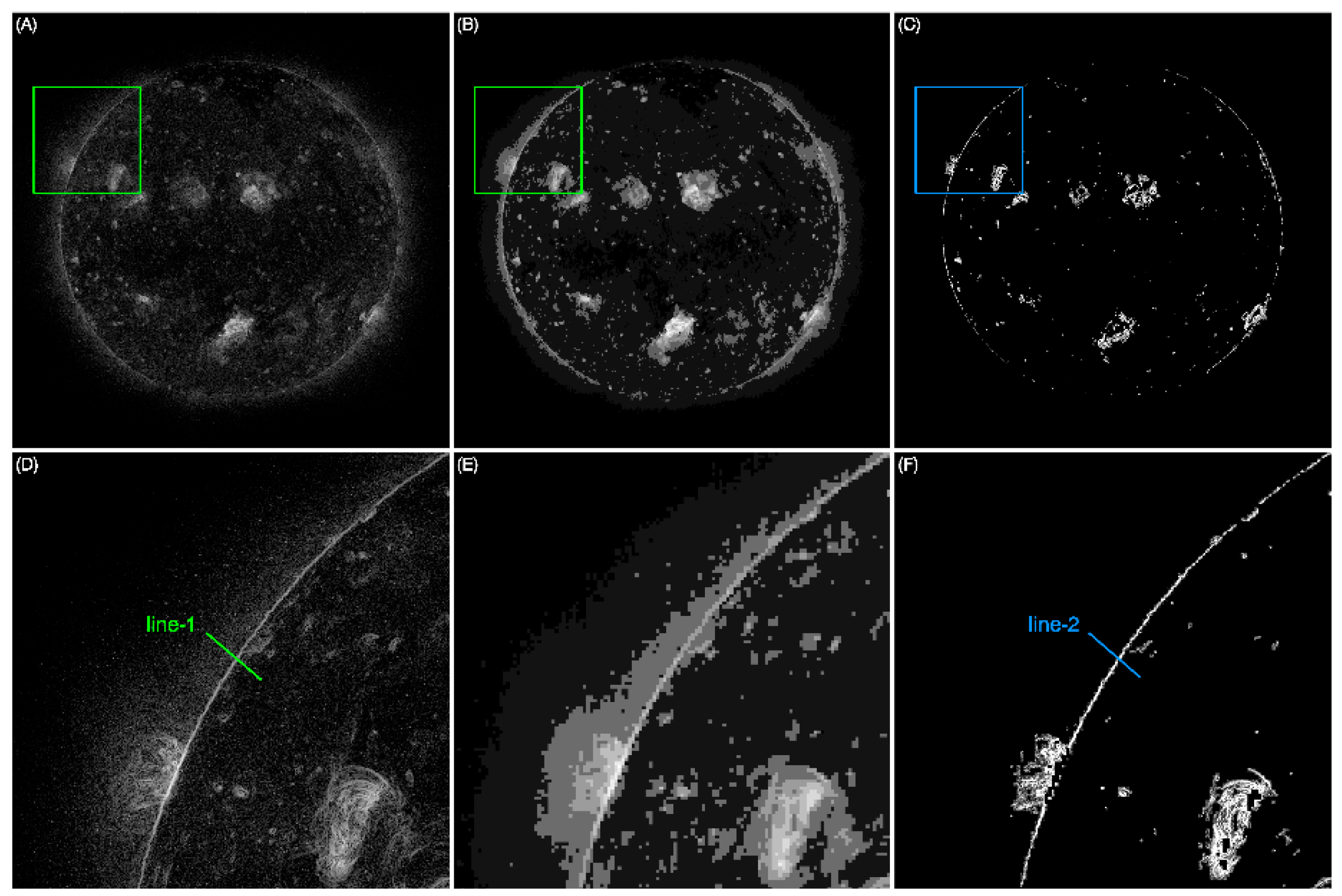
4. FLICM Algorithm
5. Least Square Circle Fitting
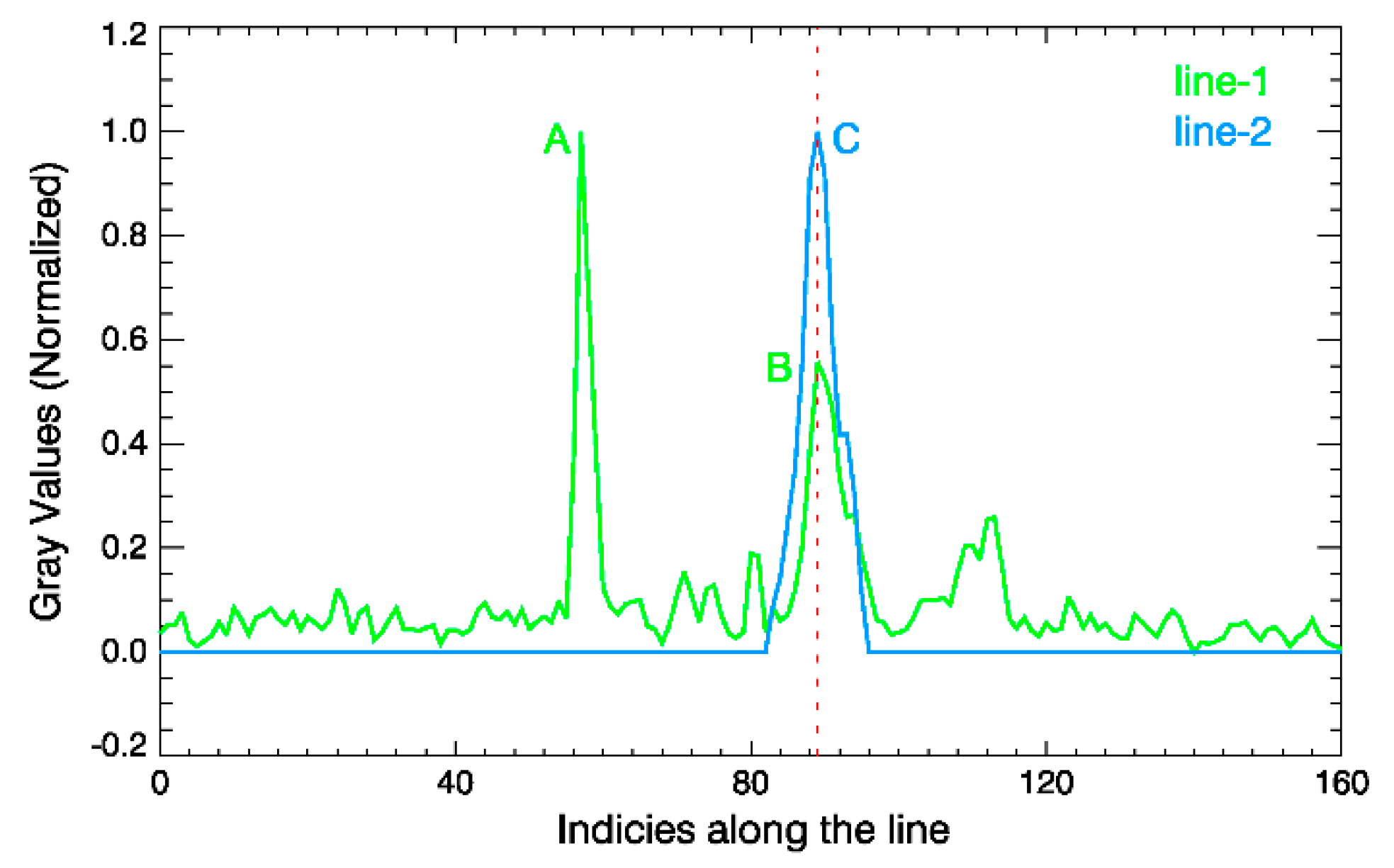
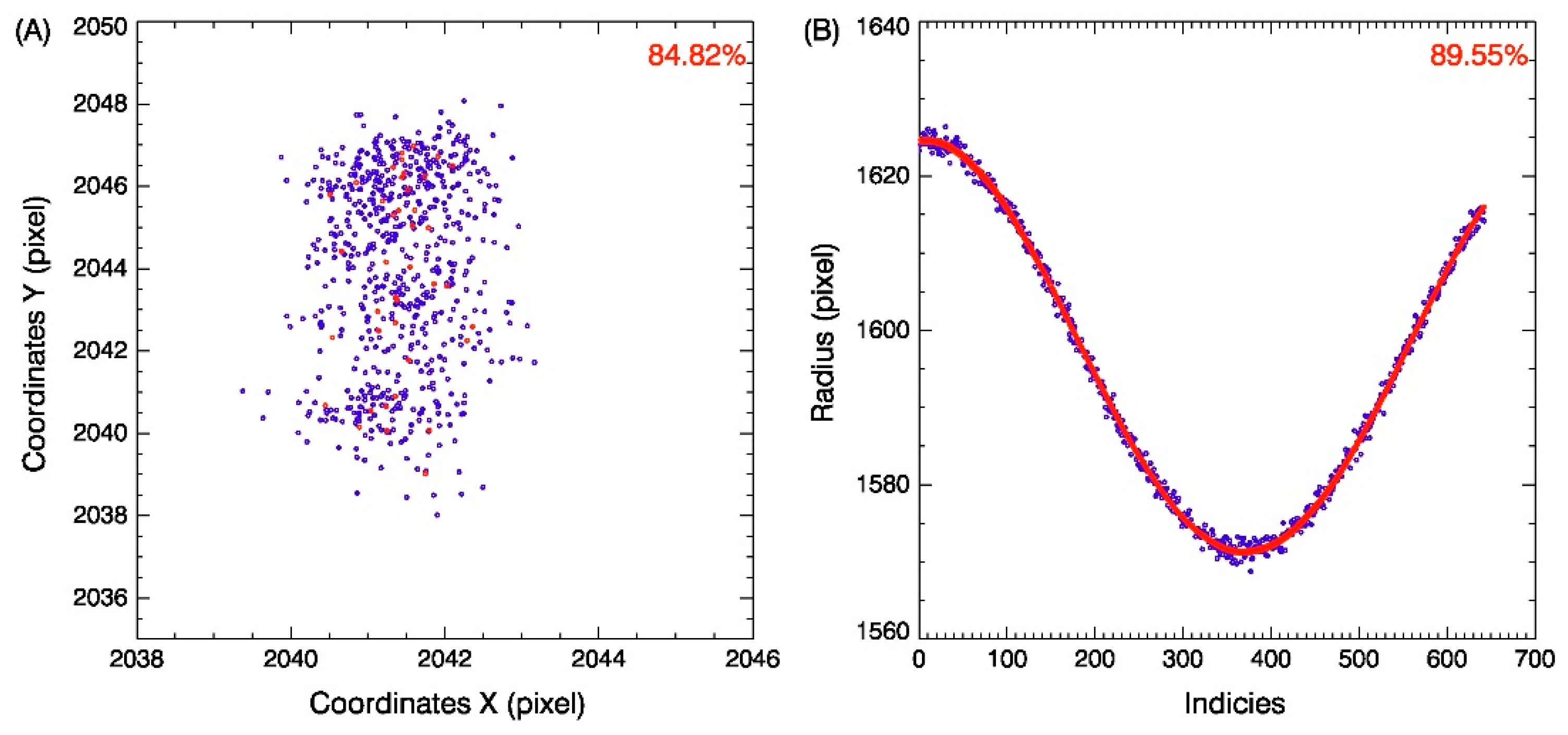
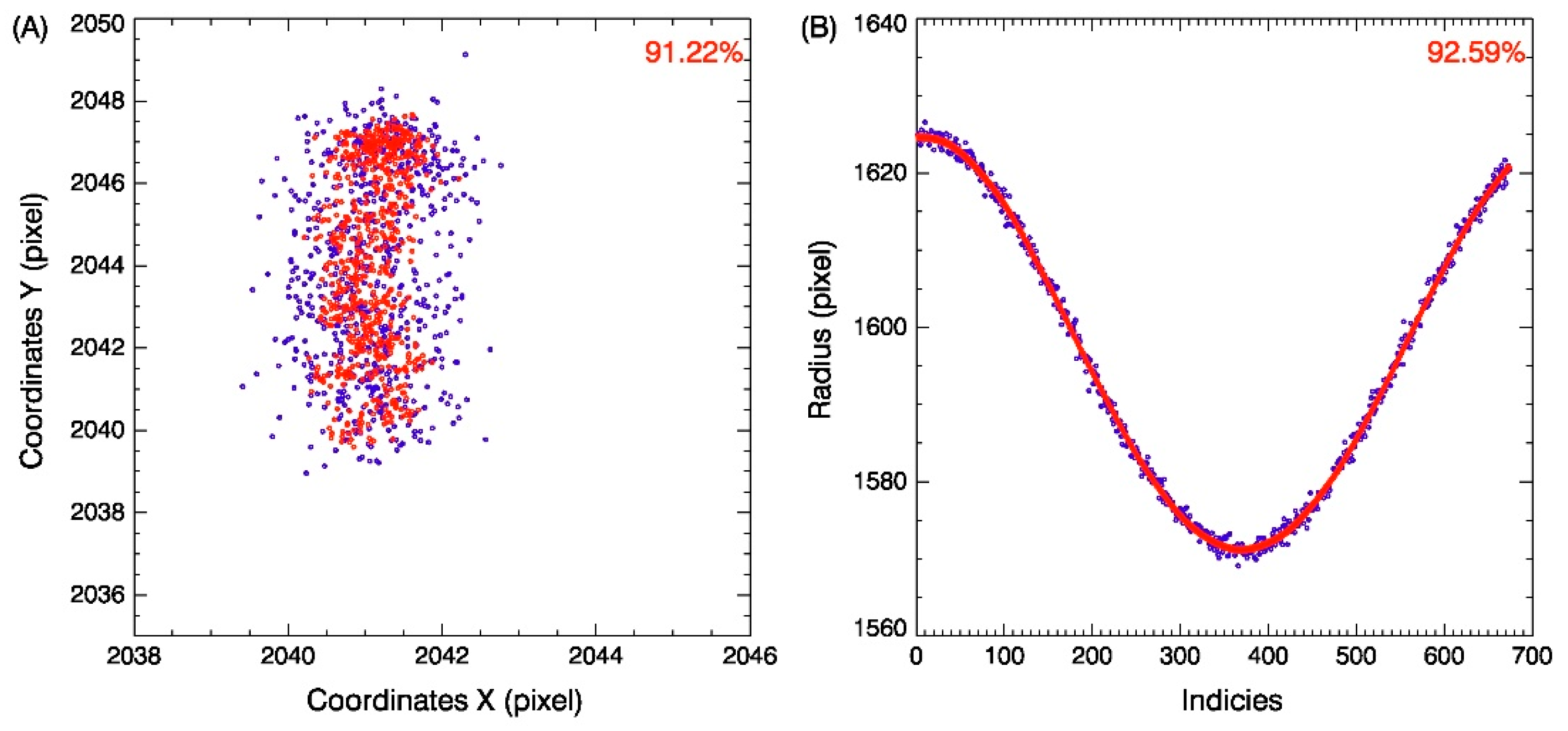
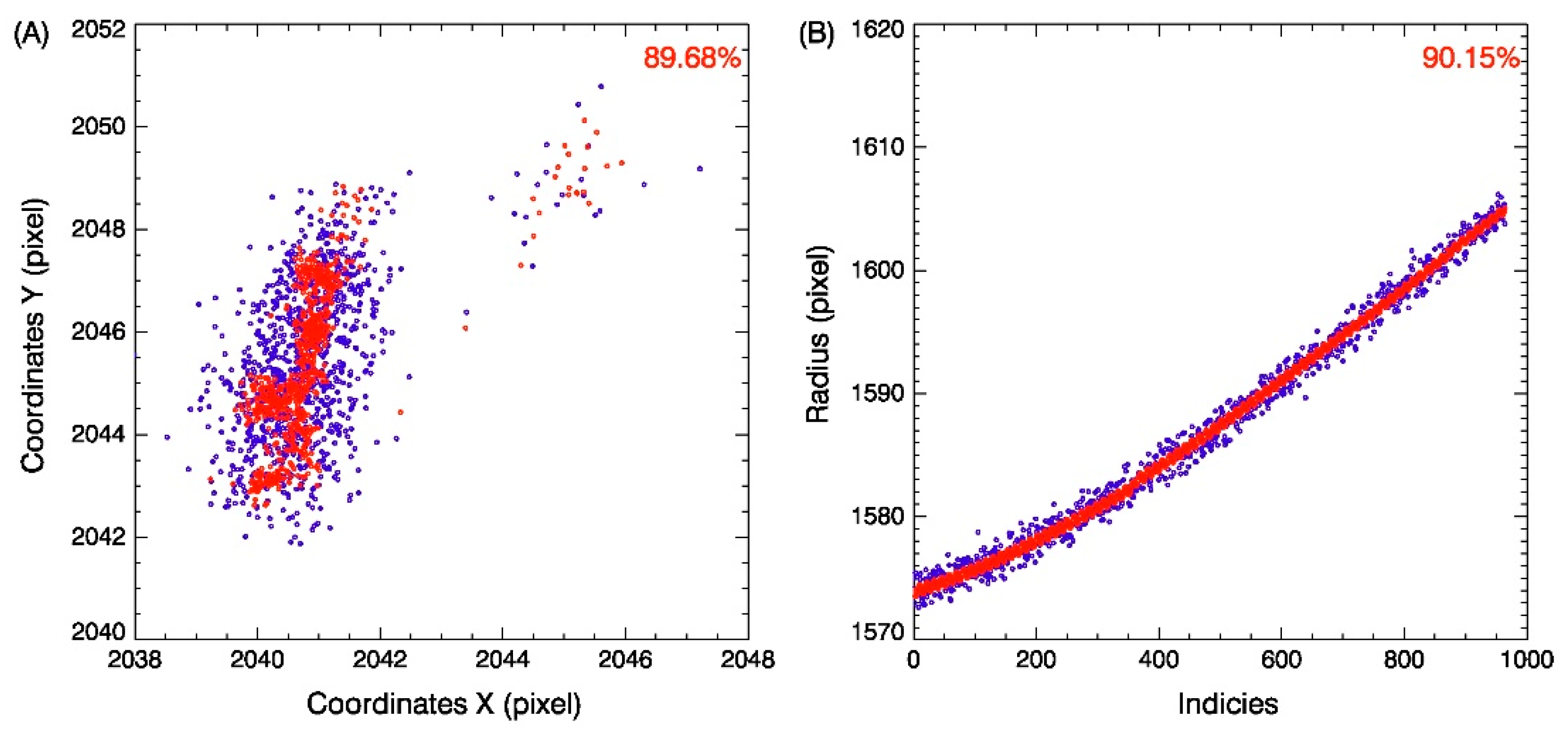
6. Statistical Analysis
7. Conclusions
- (1)
- Calculating the preliminary boundary using the Sobel operator;
- (2)
- Clustering the preliminary boundary image with the FLICM algorithm and the image is clustered into 10 categories;
- (3)
- The background is generally removed based on the clustered image; the 5 categories with the smaller values are considered the background;
- (4)
- Searching the peak value points from outside to inside around the image;
- (5)
- Fitting these points as the final boundary circle using the least square circle fitting method.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Domingo, V.; Fleck, B.; Poland, A.I. SOHO: The Solar and Heliospheric Observatory. Space Sci. Rev. 1995, 72, 81–84. [Google Scholar] [CrossRef]
- Martens, P.; Muglach, K. Scientific Highlights from the Solar and Heliospheric Observatory. In Solar Polarization; Springer: Dordrecht, The Netherlands, 1999. [Google Scholar]
- Delaboudinière, J.P.; Artzner, G.E.; Brunaud, J.; Gabriel, A.H.; Hochedez, J.F.; Millier, F.; Song, X.Y.; Au, B.; Dere, K.P.; Howard, R.A.; et al. EIT: Extreme-ultraviolet Imaging Telescope for the SOHO mission. Sol. Phys. 1995, 162, 291–312. [Google Scholar] [CrossRef]
- Strong, K.; Bruner, M.; Tarbell, T.; Wolfson, C.J. Trace—The transition region and coronal explorer. Space Sci. Rev. 1994, 70, 119–122. [Google Scholar] [CrossRef]
- Handy, B.; Bruner, M.; Tarbell, T.; Title, A.; Wolfson, C.; LaForge, M.; Oliver, J. UV Observations with the Transition Region and Coronal Explorer. Sol. Phys. 1998, 183, 29–43. [Google Scholar] [CrossRef]
- Cheimets, P.; Caldwell, D.C.; Chou, C.; Gates, R.; Lemen, J.; Podgorski, W.A.; Wolfson, C.J.; Wuelser, J.P. SDO-AIA telescope design. In Proceedings of the SPIE Optical Engineering + Applications, San Diego, CA, USA, 2–6 August 2009; Volume 7438, p. 74380G. [Google Scholar]
- Lemen, J.R.; Akin, D.J.; Boerner, P.F.; Chou, C.; Drake, J.F.; Duncan, D.W.; Edwards, C.G.; Friedlaender, F.M.; Heyman, G.F.; Hurlburt, N.E.; et al. The Atmospheric Imaging Assembly (AIA) on the Solar Dynamics Observatory (SDO). In The Solar Dynamics Observatory; Springer: New York, NY, USA, 2011. [Google Scholar]
- Marsch, E.; Fleck, B.; Schwenn, R. Solar Orbiter—A High Resolution Mission to the Sun and Inner Helisophere. COSPAR Colloq. Ser. 2001, 11, 445. [Google Scholar]
- Rochus, P.; Auchère, F.; Berghmans, D.; Harra, L.; Schmutz, W.; Schühle, U.; Addison, P.; Appourchaux, T.; Cuadrado, R.A.; Baker, D.; et al. The Solar Orbiter EUI instrument: The Extreme Ultraviolet Imager. Astron. Astrophys. 2020, 642, A8. [Google Scholar] [CrossRef]
- Chen, B.; Ding, G.-X.; He, L.-P. Solar X-ray and Extreme Ultraviolet Imager (X-EUVI) loaded onto China’s Fengyun-3E Satellite. Light. Sci. Appl. 2022, 11, 29. [Google Scholar] [CrossRef] [PubMed]
- Shimizu, T.; Katsukawa, Y.; Matsuzaki, K.; Ichimoto, K.; Kano, R.; DeLuca, E.E.; Lundquist, L.L.; Weber, M.; Tarbell, T.D.; Shine, R.A.; et al. Hinode Calibration for Precise Image Co-alignment between SOT and XRT (November 2006–April 2007). Publ. Astron. Soc. Jpn. 2007, 59 (Suppl. S3), S845–S852. [Google Scholar] [CrossRef]
- Couvidat, S.; Schou, J.; Hoeksema, J.T.; Bogart, R.S.; Bush, R.I.; Duvall, T.L.; Liu, Y.; Norton, A.A.; Scherrer, P.H. Observables Processing for the Helioseismic and Magnetic Imager Instrument on the Solar Dynamics Observatory. Sol. Phys. 2016, 291, 1887–1938. [Google Scholar] [CrossRef]
- Denker, C.; Johannesson, A.; Marquette, W.; Goode, P.R.; Wang, H.; Zirin, H. Synoptic Hα Full-Disk Observations of the Sun from Big Bear Solar Observatory—I. Instrumentation, Image Processing, Data Products, and First Results. Sol. Phys. 1999, 184, 87–102. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, S.; Deng, Y.; Bai, X.; Mao, X. The measurement of flat fields and polarization offset from the routine observation data of a solar rotation. Chin. Sci. Bull. 2017, 63, 301–310. [Google Scholar] [CrossRef][Green Version]
- Wang, Y.; Bai, X.; Liu, S.; Deng, Y.; SUN, Y. Flat-field measuring and correction method for full-disk solar image based on ground glass. Chin. Sci. Bull. 2017, 62, 3057–3066. [Google Scholar] [CrossRef]
- Wang, Y.; Bai, X.; Liu, S.; Deng, Y.; Zhang, Z.; Sun, Y. Flat-fielding of Full-disk Solar Images with a Gaussian-type Diffuser. Sol. Phys. 2019, 294, 127. [Google Scholar] [CrossRef]
- Shine, R.A.; Nightingale, R.W.; Boerner, P.; Tarbell, T.D.; Wolfson, C.J. Flat Fielding and Image Alignments for AIA/SDO Data Images. In Proceedings of the AGU Meeting, San Francisco, CA, USA, 13–17 December 2010; p. SH23C-1872. [Google Scholar]
- Shine, R.A.; Wolfson, C.; Boerner, P.F.; Tarbell, T.D.; Nightingale, R.W. Monitoring Image Alignments and Flat Fields for AIA/SDO Data Images. In Proceedings of the SPD Meeting #42, Las Cruces, NM, USA, 12–16 June 2011; pp. 21–26. [Google Scholar]
- Zhang, J.Y.; Yan, C.; Huang, X.X. Edge detection of images based on improved Sobel operator and genetic algorithms. In Proceedings of the 2009 International Conference on Image Analysis and Signal Processing, Linhai, China, 11–12 April 2009. [Google Scholar]
- Kanopoulos, N.; Vasanthavada, N.; Baker, R. Design of an image edge detection filter using the Sobel operator. IEEE J. Solid-State Circuits 1988, 23, 358–367. [Google Scholar] [CrossRef]
- Krinidis, S.; Chatzis, V. A Robust Fuzzy Local Information C-Means Clustering Algorithm. IEEE Trans. Image Process. 2010, 19, 1328–1337. [Google Scholar] [CrossRef] [PubMed]
- Ding, G.; He, F.; Zhang, X.; Chen, B. A new auroral boundary determination algorithm based on observations from TIMED/GUVI and DMSP/SSUSI. J. Geophys. Res. Space Phys. 2017, 122, 2162–2173. [Google Scholar] [CrossRef]
- Liu, F.; Han, P.; Wei, Y.; Yang, K.; Huang, S.; Li, X.; Zhang, G.; Bai, L.; Shao, X. Deeply seeing through highly turbid water by active polarization imaging. Opt. Lett. 2018, 43, 4903–4906. [Google Scholar] [CrossRef] [PubMed]
- Liu, F.; Wei, Y.; Han, P.; Yang, K.; Bai, L.; Shao, X. Polarization-based exploration for clear underwater vision in natural illumination. Opt. Express 2019, 27, 3629–3641. [Google Scholar] [CrossRef] [PubMed]
- Liu, F.; Zhang, S.; Han, P.; Chen, F.; Zhao, L.; Fan, Y.; Shao, X. Depolarization index from Mueller matrix descatters imaging in turbid water. Chin. Opt. Lett. 2022, 20, 022601. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | 2014 | 2019 | 2021 |
|---|---|---|---|
| Solar level | active | quiet | moderate |
| Total images | 718 | 729 | 1076 |
| |Xcalculation − XAIA| ≤ 2 pixels and |Ycalculation − YAIA| ≤ 2 pixels | 609 (84.82%) | 665 (91.22%) | 965 (89.68%) |
| |Xcalculation − XAIA| > 2 pixels or |Ycalculation − YAIA| > 2 pixels | 109 (15.18%) | 64 (8.78%) | 111 (10.32%) |
| |Rcalculation − RAIA| ≤ 3 pixels | 643 (89.55%) | 675 (92.59%) | 970 (90.15%) |
| |Rcalculation − RAIA| > 3 pixels | 75 (10.45%) | 54 (7.41%) | 106 (9.85%) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Zhang, J.; Liu, B.; Jiang, C.; Ren, L.; Xue, J.; Song, Y. An Algorithm to Extract the Boundary and Center of EUV Solar Image Based on Sobel Operator and FLICM. Photonics 2022, 9, 889. https://doi.org/10.3390/photonics9120889
Li S, Zhang J, Liu B, Jiang C, Ren L, Xue J, Song Y. An Algorithm to Extract the Boundary and Center of EUV Solar Image Based on Sobel Operator and FLICM. Photonics. 2022; 9(12):889. https://doi.org/10.3390/photonics9120889
Chicago/Turabian StyleLi, Shuai, Jianhua Zhang, Bei Liu, Chengzhi Jiang, Lanxu Ren, Jingjing Xue, and Yansong Song. 2022. "An Algorithm to Extract the Boundary and Center of EUV Solar Image Based on Sobel Operator and FLICM" Photonics 9, no. 12: 889. https://doi.org/10.3390/photonics9120889
APA StyleLi, S., Zhang, J., Liu, B., Jiang, C., Ren, L., Xue, J., & Song, Y. (2022). An Algorithm to Extract the Boundary and Center of EUV Solar Image Based on Sobel Operator and FLICM. Photonics, 9(12), 889. https://doi.org/10.3390/photonics9120889