A Novel Time Delay Estimation and Calibration Method of TI-ADC Based on a Coherent Optical Communication System

Abstract
:1. Introduction
2. Review of the Least Square Estimation Method
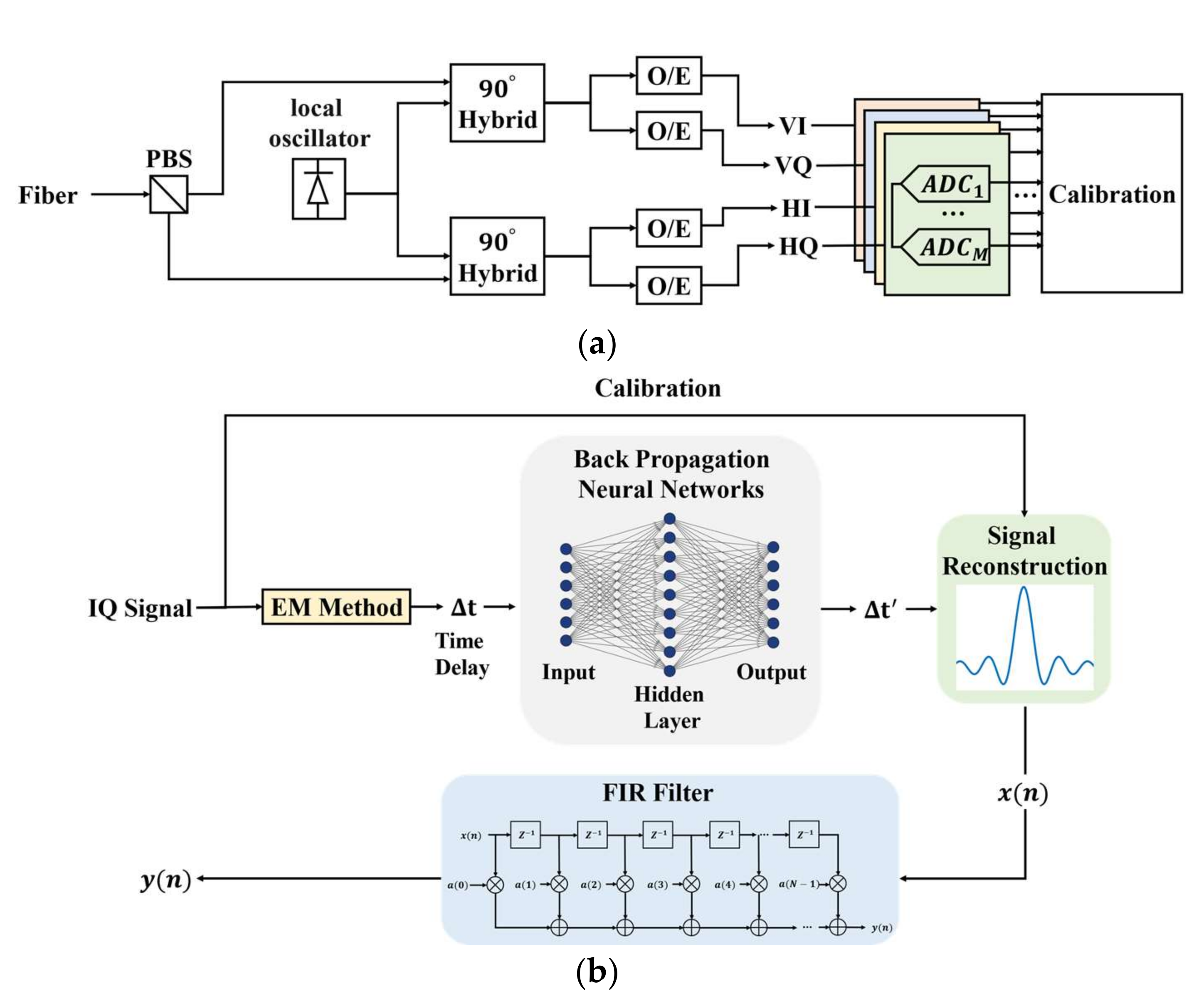
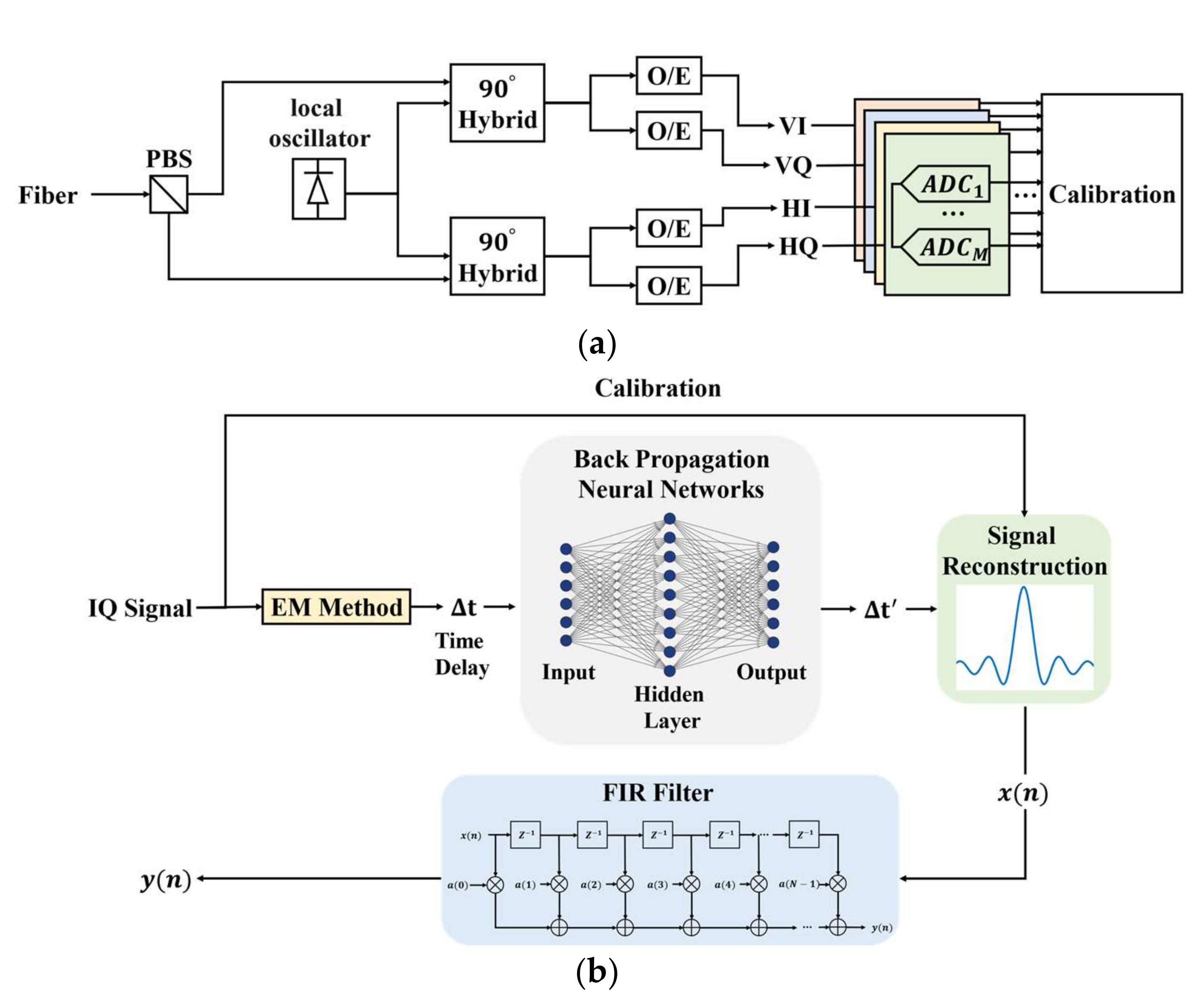
3. Estimation with the EM-BP Method and Signal Reconstruction with FIR
3.1. Time Delay Estimation
3.1.1. Expectation Maximum Method
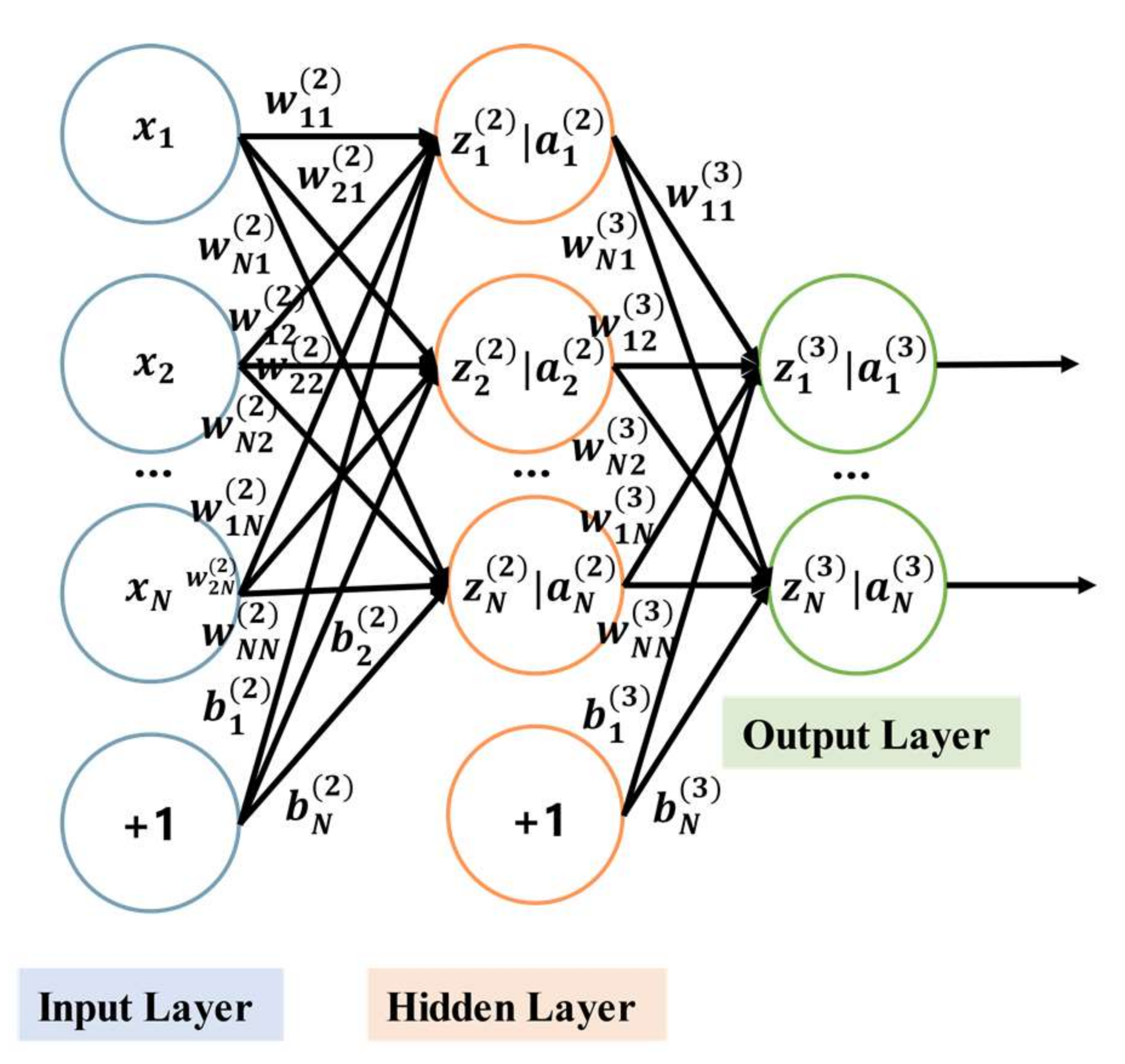
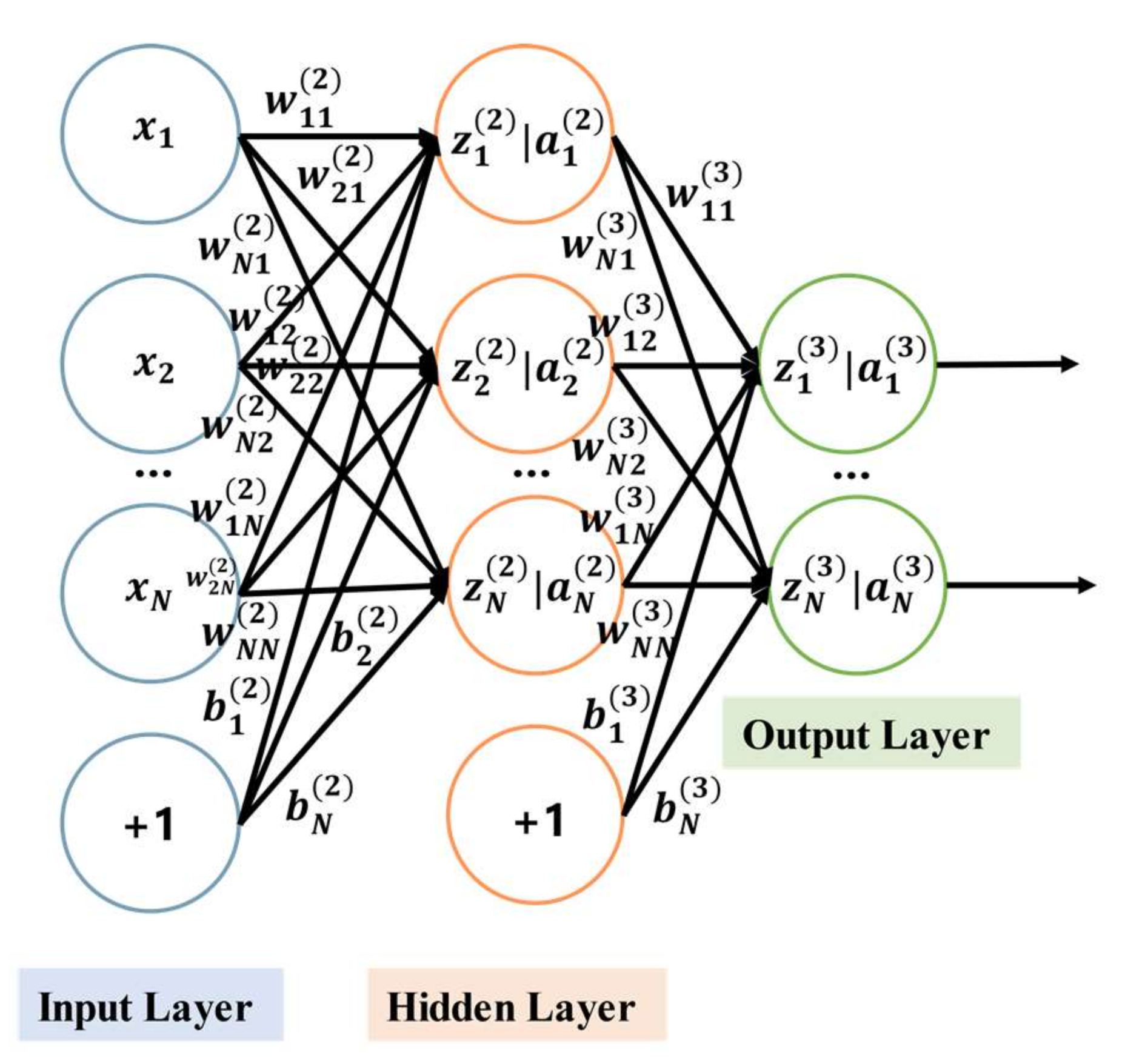
3.1.2. Back Propagation Neural Network
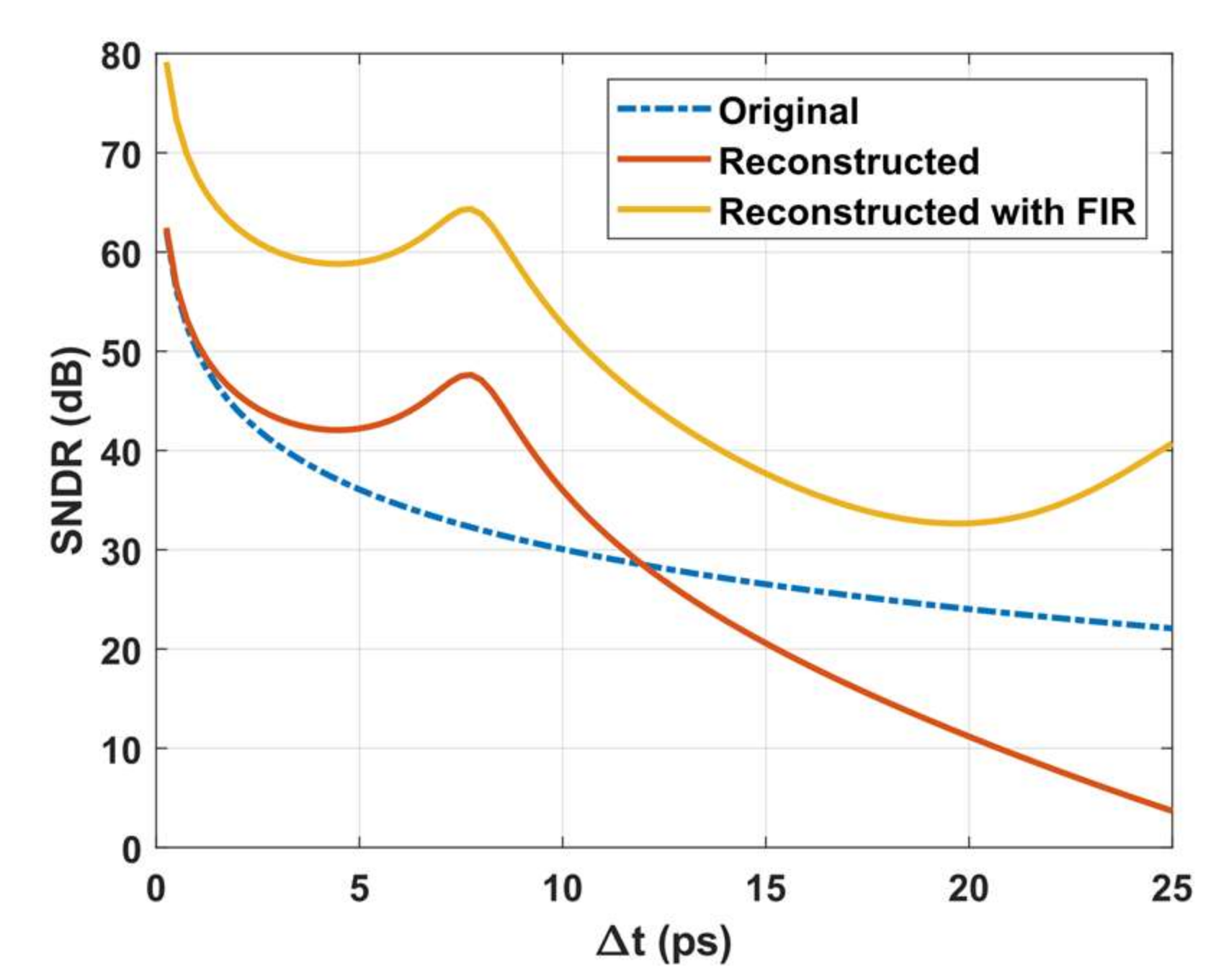
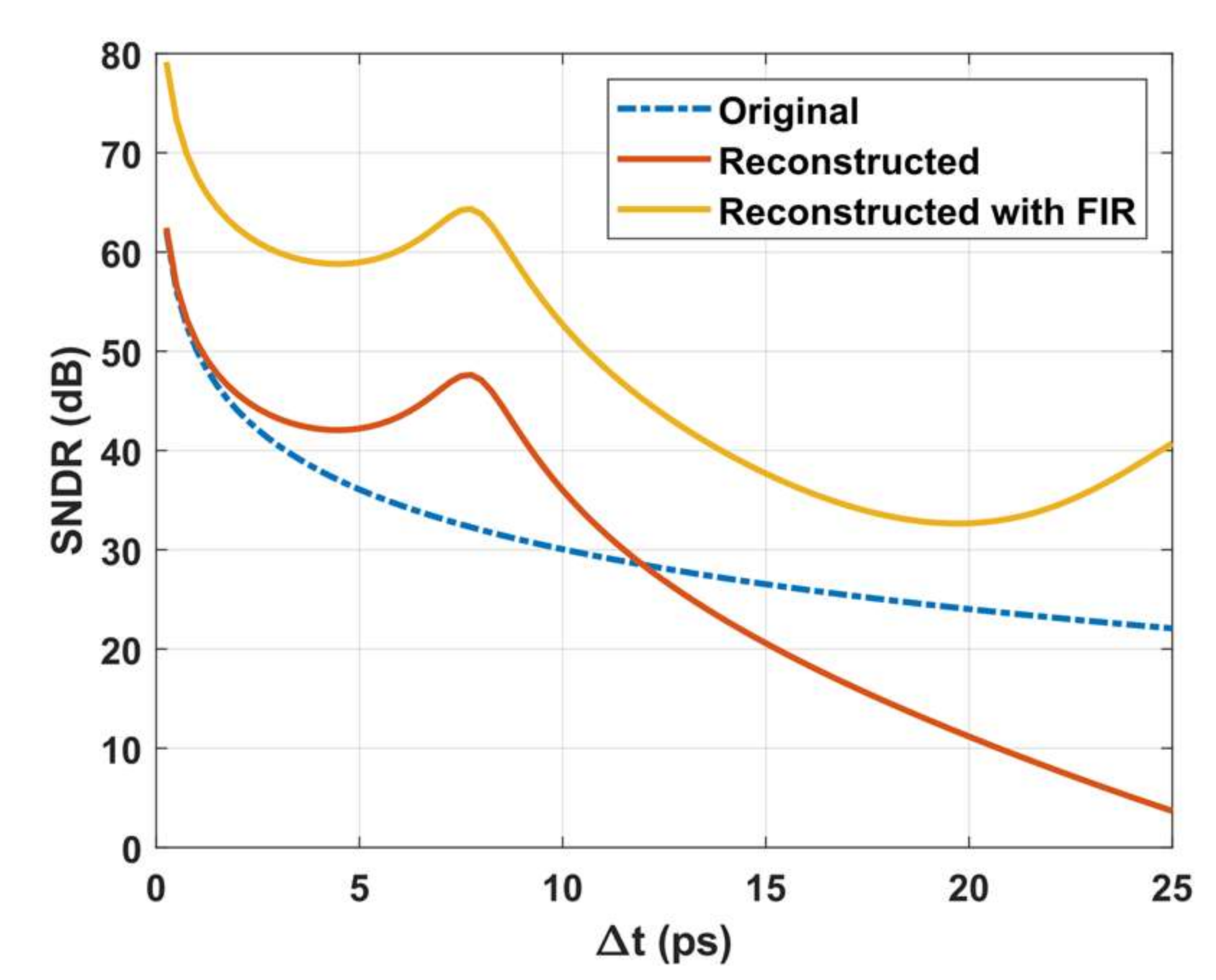
3.2. Calibration Based on Signal Reconstruction with FIR
4. Experimental Results
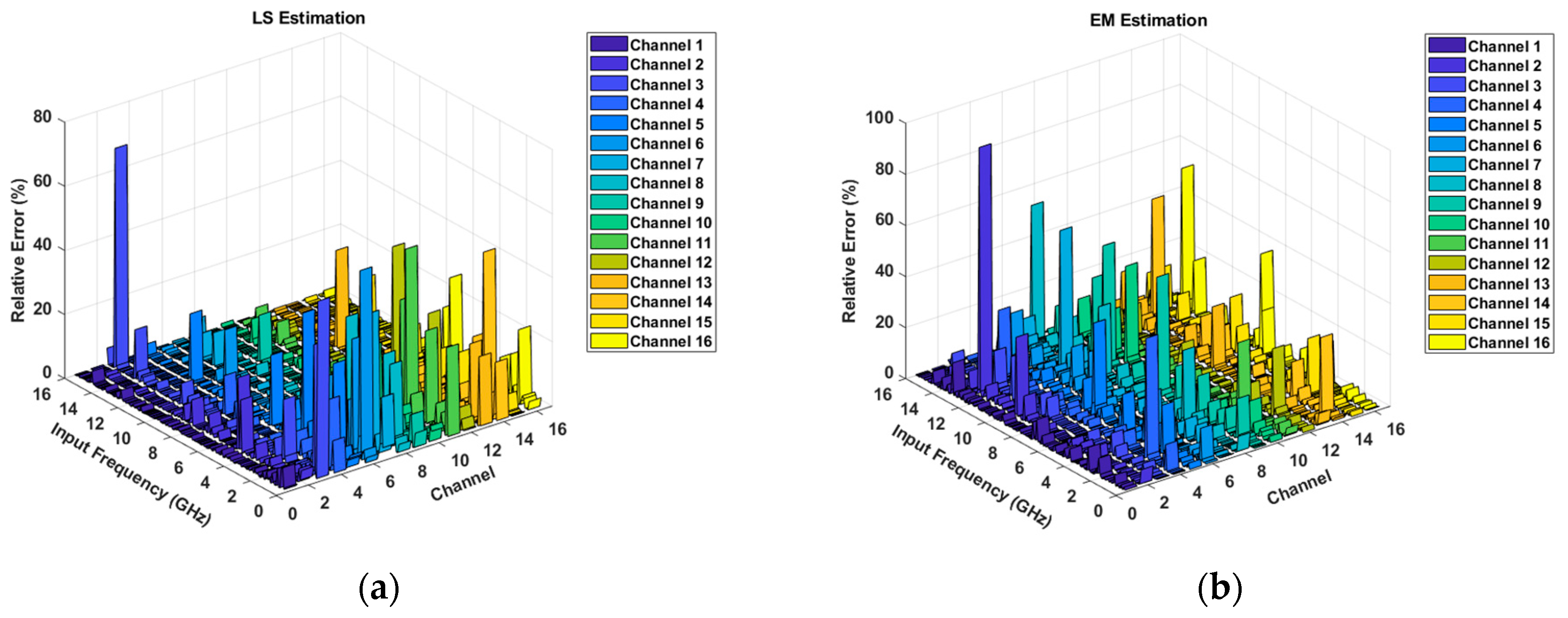
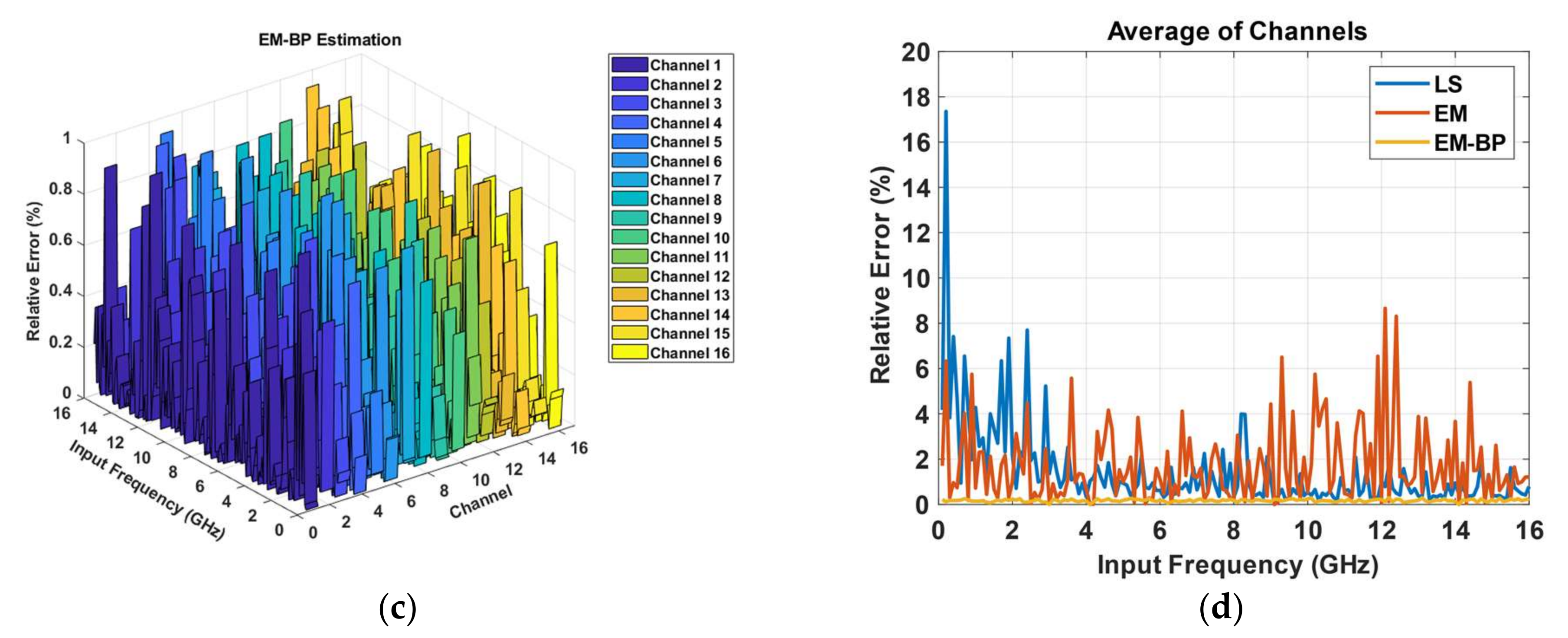
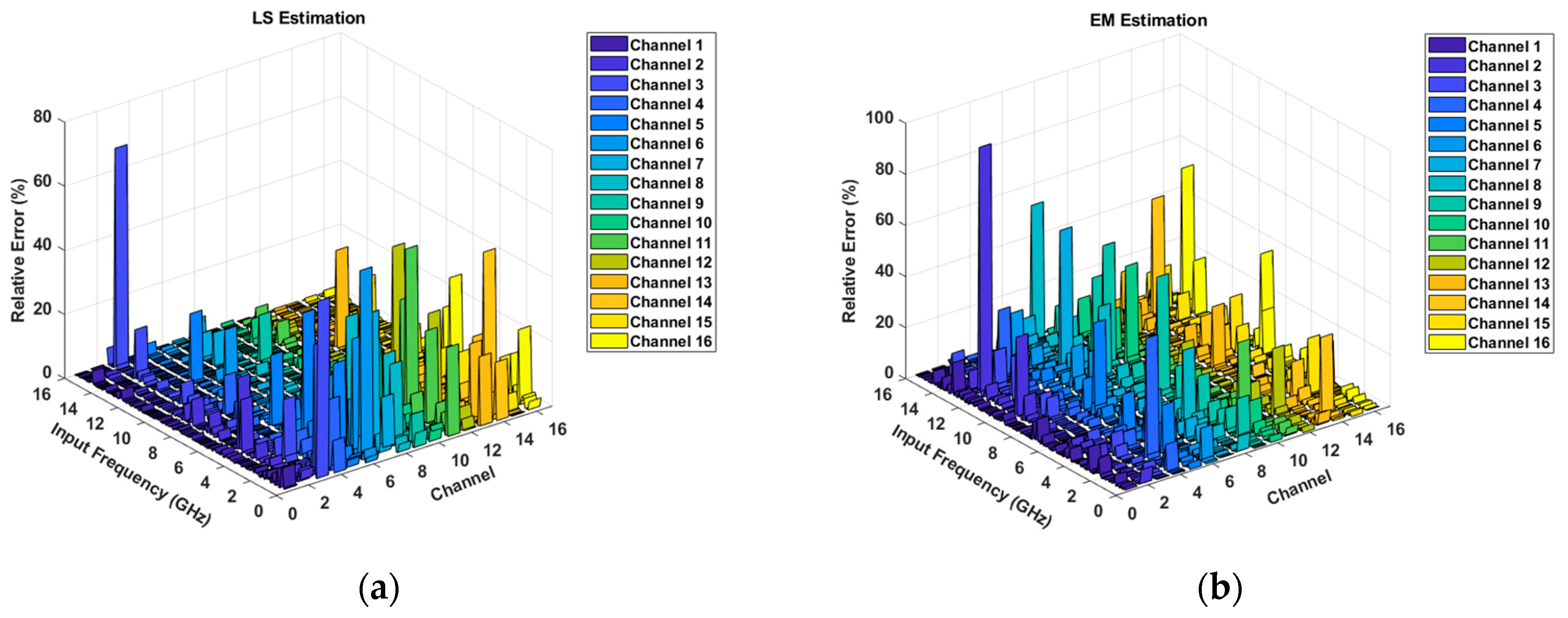
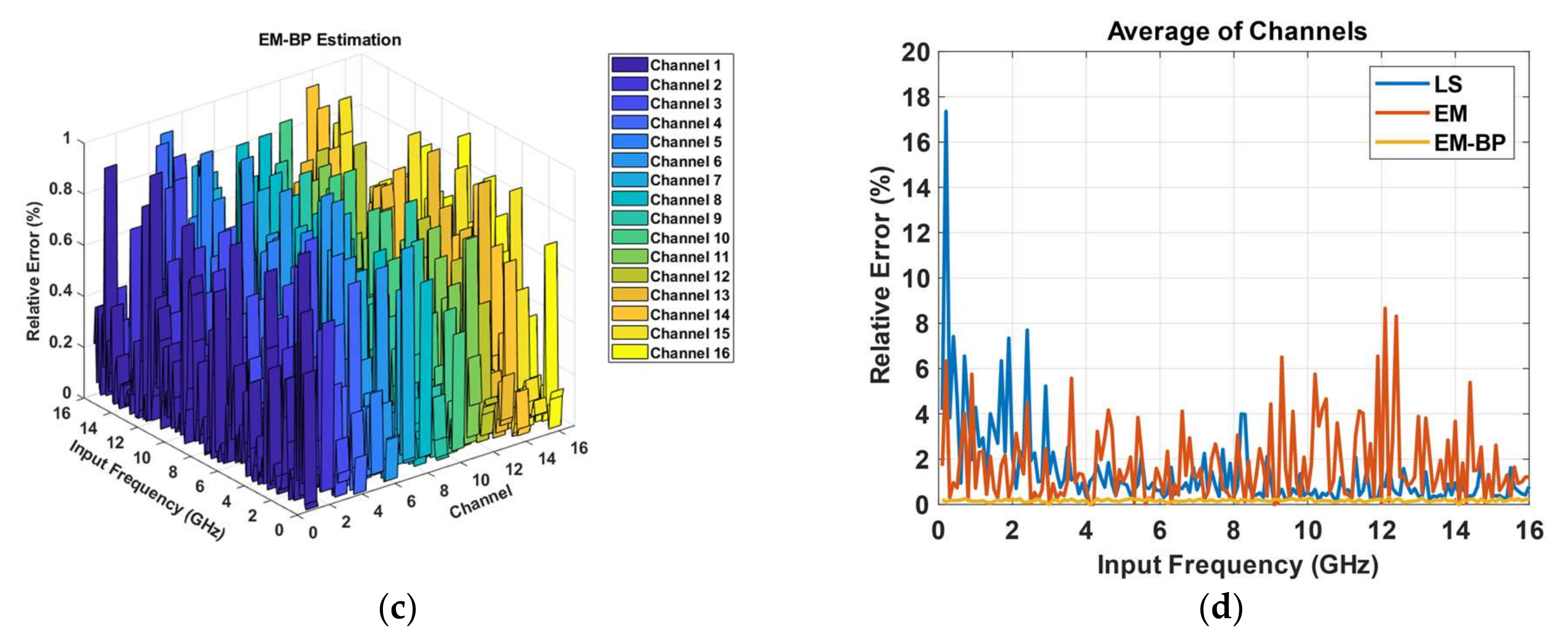
4.1. Comparison of Estimation Accuracy among LS, EM, and EM-BP Neural Network
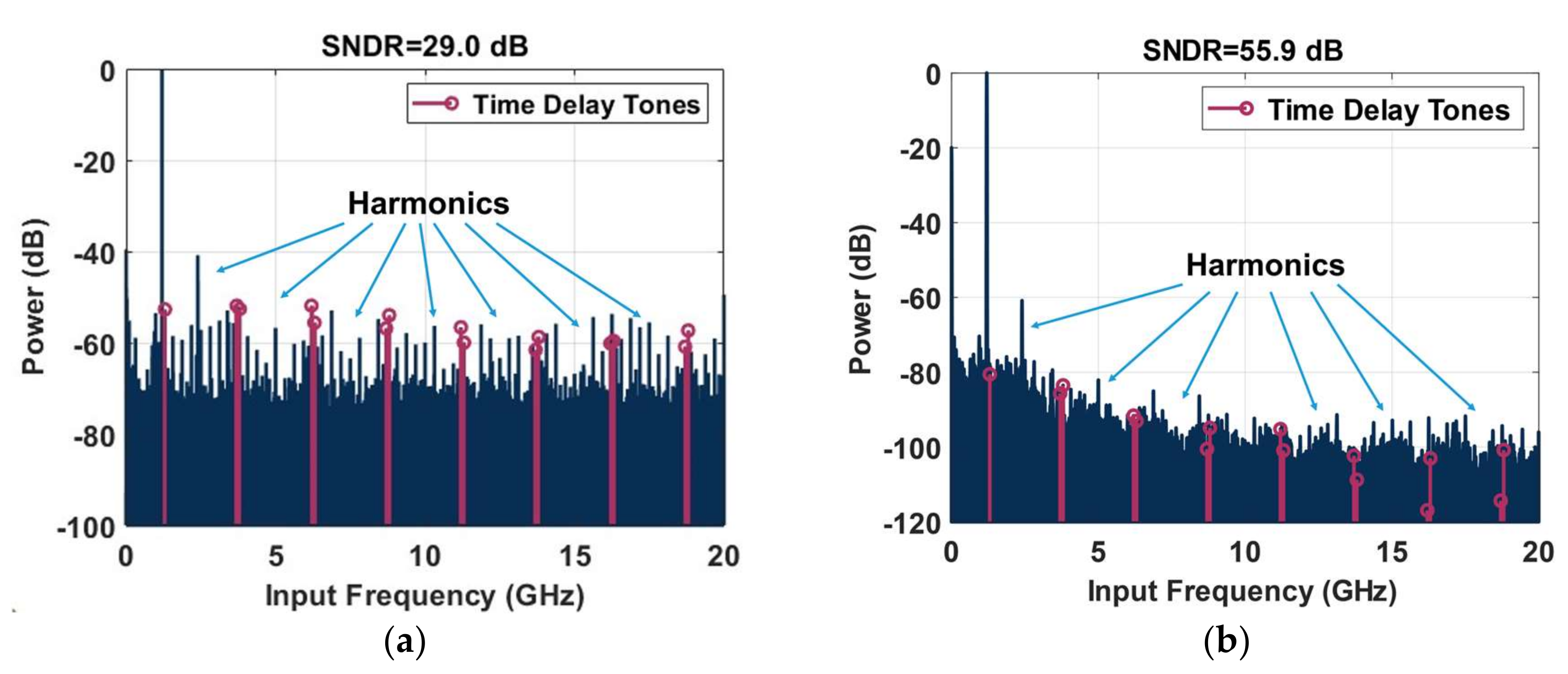
4.2. Calibration of the Time Delay
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
References
- Lin, Y.-Z.; Tsai, C.-H.; Tsou, S.-C.; Lu, C.-H. A 8.2-mW 10-b 1.6-GS/s 4× TI SAR ADC with fast reference charge neutralization and background timing-skew calibration in 16-nm CMOS. In Proceedings of the 2016 IEEE Symposium on VLSI Circuits (VLSI-Circuits), Honolulu, Hi, USA, 14–16 June 2016; pp. 1–2. [Google Scholar] [CrossRef]
- Hsu, C.-C.; Huang, F.-C.; Shih, C.-Y.; Huang, C.-C.; Lin, Y.-H.; Lee, C.-C.; Razavi, B. An 11b 800MS/s Time-Interleaved ADC with Digital Background Calibration. In Proceedings of the 2007 IEEE International Solid-State Circuits Conference Digest of Technical Papers, San Francisco, CA, USA, 11–15 February 2007; pp. 464–466. [Google Scholar] [CrossRef]
- Kang, H.-W.; Hong, H.-K.; Kim, W.; Ryu, S.-T. A Time-Interleaved 12-b 270-MS/s SAR ADC With Virtual-Timing-Reference Timing-Skew Calibration Scheme. IEEE J. Solid-State Circuits 2018, 53, 2584–2594. [Google Scholar] [CrossRef]
- Li, J.; Wu, S.; Liu, Y.; Ning, N.; Yu, Q. A Digital Timing Mismatch Calibration Technique in Time-Interleaved ADCs. IEEE Trans. Circuits Syst. II Express Briefs 2014, 61, 486–490. [Google Scholar] [CrossRef]
- Li, X.; Wu, J.; Vogel, C. A Background Correlation-Based Timing Skew Estimation Method for Time-Interleaved ADCs. IEEE Access 2021, 9, 45730–45739. [Google Scholar] [CrossRef]
- Wang, D.; Zhu, X.; Guo, X.; Luan, J.; Zhou, L.; Wu, D.; Liu, H.; Wu, J.; Liu, X. A 2.6 GS/s 8-Bit Time-Interleaved SAR ADC in 55 nm CMOS Technology. Electronics 2019, 8, 305. [Google Scholar] [CrossRef] [Green Version]
- Razavi, B. Design Considerations for Interleaved ADCs. IEEE J. Solid-State Circuits 2013, 48, 1806–1817. [Google Scholar] [CrossRef] [Green Version]
- Dortz, N.L.; Blanc, J.; Simon, T.; Verhaeren, S.; Rouat, E.; Urard, P.; Tual, S.L.; Goguet, D.; Lelandais-Perrault, C.; Dortz, N.L.; et al. A 1.62 GS/s Time-Interleaved SAR ADC with fully digital background mismatch calibration achieving interleaving spurs below 70 dBFS. In Proceedings of the 2014 IEEE International Solid-State Circuits Conference Digest of Technical Papers, San Francisco, CA, USA, 9–13 February 2014; pp. 1–4. [Google Scholar]
- Xing, D.; Zhu, Y.; Chan, C.; Sin, S.; Ye, F.; Ren, J.; Martins, R.P. Seven-bit 700-MS/s Four-Way Time-Interleaved SAR ADC with Partial V cm-Based Switching. IEEE Trans. Very Large Scale Integr. Syst. 2016, 25, 1168–1172. [Google Scholar] [CrossRef]
- Guo, M.; Mao, J.; Sin, S.-W.; Wei, H.; Martins, R.P. A 5 GS/s 29 mW Interleaved SAR ADC With 48.5 dB SNDR Using Digital-Mixing Background Timing-Skew Calibration for Direct Sampling Applications. IEEE Access 2020, 8, 138944–138954. [Google Scholar] [CrossRef]
- Guo, M.; Mao, J.; Sin, S.-W.; Wei, H.; Martins, R.P. A 1.6-GS/s 12.2-mW Seven-/Eight-Way Split Time-Interleaved SAR ADC Achieving 54.2-dB SNDR With Digital Background Timing Mismatch Calibration. IEEE J. Solid-State Circuits 2020, 55, 693–705. [Google Scholar] [CrossRef]
- Sin, S.-W.; Chio, U.-F.; Seng-Pan, U.; Martins, R.P. Statistical Spectra and Distortion Analysis of Time-Interleaved Sampling Bandwidth Mismatch. IEEE Trans. Circuits Syst. II Express Briefs 2008, 55, 648–652. [Google Scholar] [CrossRef]
- Huang, C.-C.; Wang, C.-Y.; Wu, J.-T. A CMOS 6-Bit 16-GS/s Time-Interleaved ADC Using Digital Background Calibration Techniques. IEEE J. Solid-State Circuits 2011, 46, 848–858. [Google Scholar] [CrossRef]
- El-Chammas, M.; Murmann, B. A 12-GS/s 81-mW 5-bit Time-Interleaved Flash ADC With Background Timing Skew Calibration. IEEE J. Solid-State Circuits 2011, 46, 838–847. [Google Scholar] [CrossRef]
- Elbornsson, J.; Gustafsson, F.; Eklund, J.-E. Blind equalization of time errors in a time-interleaved ADC system. IEEE Trans. Signal Process. 2005, 53, 1413–1424. [Google Scholar] [CrossRef] [Green Version]
- Huang, S.; Levy, B. Adaptive blind calibration of timing offset and gain mismatch for two-channel time-interleaved ADCs. IEEE Trans. Circuits Syst. I Regul. Pap. 2006, 53, 1278–1288. [Google Scholar] [CrossRef]
- Divi, V.; Wornell, G.W. Blind Calibration of Timing Skew in Time-Interleaved Analog-to-Digital Converters. IEEE J. Sel. Top. Signal Process. 2009, 3, 509–522. [Google Scholar] [CrossRef]
- Solis, F.; Bocco, A.F.; Morero, D.; Hueda, M.R.; Reyes, B.T. Background Calibration of Time-Interleaved ADC for Optical Co-herent Receivers using Error Backpropagation Techniques. In Proceedings of the 2020 IEEE International Symposium on Circuits and Systems (ISCAS), Seville, Spain, 17–20 May 2020; pp. 1–5. [Google Scholar]
- Garvik, H.; Wulff, C.; Ytterdal, T. An 11.0 bit ENOB, 9.8 fJ/conv.-step noise-shaping SAR ADC calibrated by least squares estimation. In Proceedings of the 2017 IEEE Custom Integrated Circuits Conference (CICC), Austin, TX, USA, 30 April–3 May 2017; pp. 1–4. [Google Scholar]
- Balakrishnan, J.; Ramakrishnan, S.; Gopinathan, V. Parameter mismatch estimation in a parallel interleaved ADC. In Proceedings of the 2009 IEEE International Symposium on Circuits and Systems, Taipei, Taiwan, 17–24 May 2009; pp. 1113–1116. [Google Scholar] [CrossRef]
- Gehlot, S.K.; Singh, R. Trajectory estimation of a moving charged particle: An application of least square estimation (LSE) approach. In Proceedings of the 2014 International Conference on Medical Imaging, m-Health and Emerging Communication Systems (MedCom), Greater Noida, India, 7–8 November 2014; pp. 262–265. [Google Scholar]
- Premkumar, M.; Chitra, M.; Arun, M.; Saravanan, M. Least squares based channel estimation approach and Bit Error Rate analysis of Cognitive Radio. In Proceedings of the 2015 International Conference on Robotics, Automation, Control and Embedded Systems (RACE), Chennai, India, 18–20 February 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Greshishchev, Y.M.; Aguirre, J.; Besson, M.; Gibbins, R.; Falt, C.; Flemke, P.; Ben-Hamida, N.; Pollex, D.; Schvan, P.; Wang, S.-C. A 40 GS/s 6b ADC in 65 nm CMOS. In Proceedings of the 2010 IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 7–11 February 2010; pp. 390–391. [Google Scholar]
- Kawaguchi, Y.; Ramaswami, S.; Takashima, R.; Endo, T.; Ikeshita, R. Sub-Nyquist non-uniform sampling for low-cost sound monitoring. In Proceedings of the 2017 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference (APSIPA ASC), Kuala Lumpur, Malaysia, 12–15 December 2017; pp. 452–456. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Publication | This Work | [13] | [23] | [10] | [11] |
|---|---|---|---|---|---|
| Technology (nm) | 45 | 65 | 65 | 28 | 28 |
| Resolution (bit) | 8 | 6 | 6 | 10 | 10 |
| TI Channels | 16 | 8 | 16 | 16 | 8 |
| Sampling Frequency (GS/s) | 40 | 16 | 40 | 5 | 1.6 |
| Supply (V) | 1.0 | 1.5 | 1.0/2.5 | 1.0/0.85 | 0.9/0/8 |
| SNDR (dB) | 55.9 | 28.0 | N.A. | 48.5 | 54.2 |
| SFDR (dB) | 61.2 | 40.4 | 35.0 | 59.6 | 67.1 |
| ENOB (bits) | 6.7 | 4.9 | 5.5 | N.A. | N.A. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Li, S.; Li, L.; Huang, Z. A Novel Time Delay Estimation and Calibration Method of TI-ADC Based on a Coherent Optical Communication System. Photonics 2021, 8, 398. https://doi.org/10.3390/photonics8090398
Zhao Y, Li S, Li L, Huang Z. A Novel Time Delay Estimation and Calibration Method of TI-ADC Based on a Coherent Optical Communication System. Photonics. 2021; 8(9):398. https://doi.org/10.3390/photonics8090398
Chicago/Turabian StyleZhao, Yongjie, Sida Li, Longqing Li, and Zhiping Huang. 2021. "A Novel Time Delay Estimation and Calibration Method of TI-ADC Based on a Coherent Optical Communication System" Photonics 8, no. 9: 398. https://doi.org/10.3390/photonics8090398
APA StyleZhao, Y., Li, S., Li, L., & Huang, Z. (2021). A Novel Time Delay Estimation and Calibration Method of TI-ADC Based on a Coherent Optical Communication System. Photonics, 8(9), 398. https://doi.org/10.3390/photonics8090398