Magnetic Field Sensing Characteristics Based on Optical Microfiber Coupler Interferometer and Magnetic Fluid

 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Sensing Principle and Fabrication
2.1. Principle
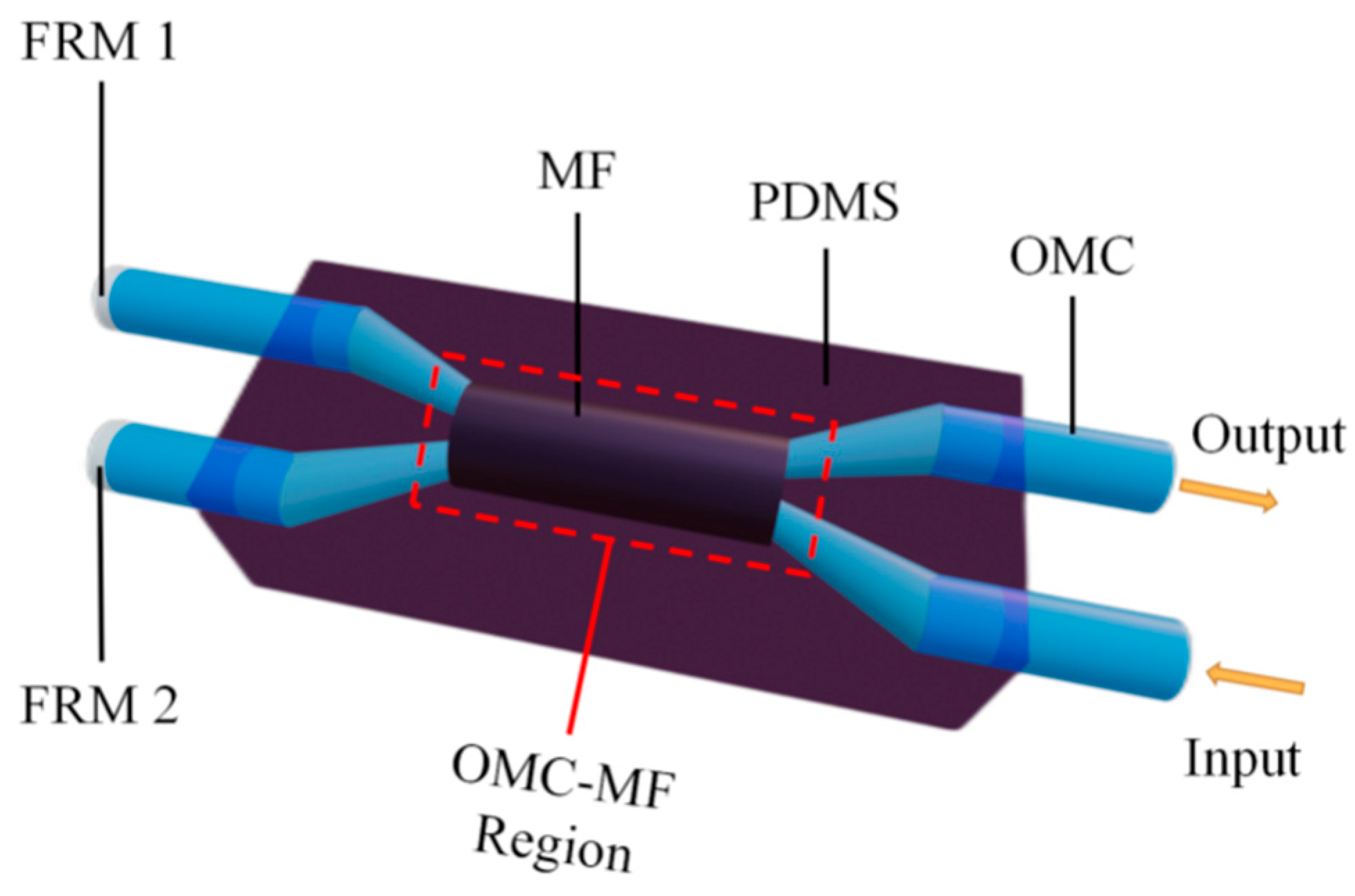
2.2. Structure and Fabrication
3. Experiment Result
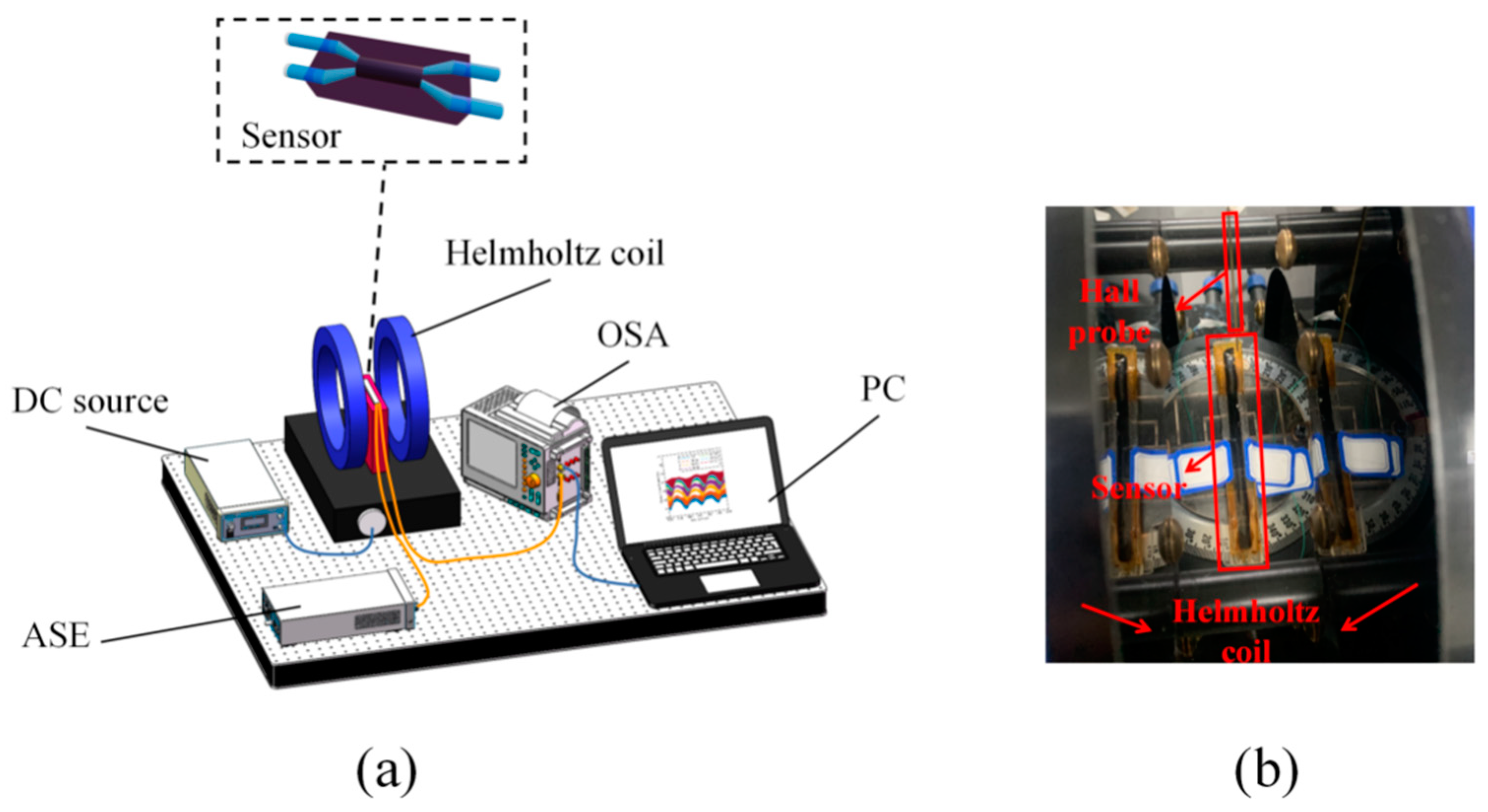
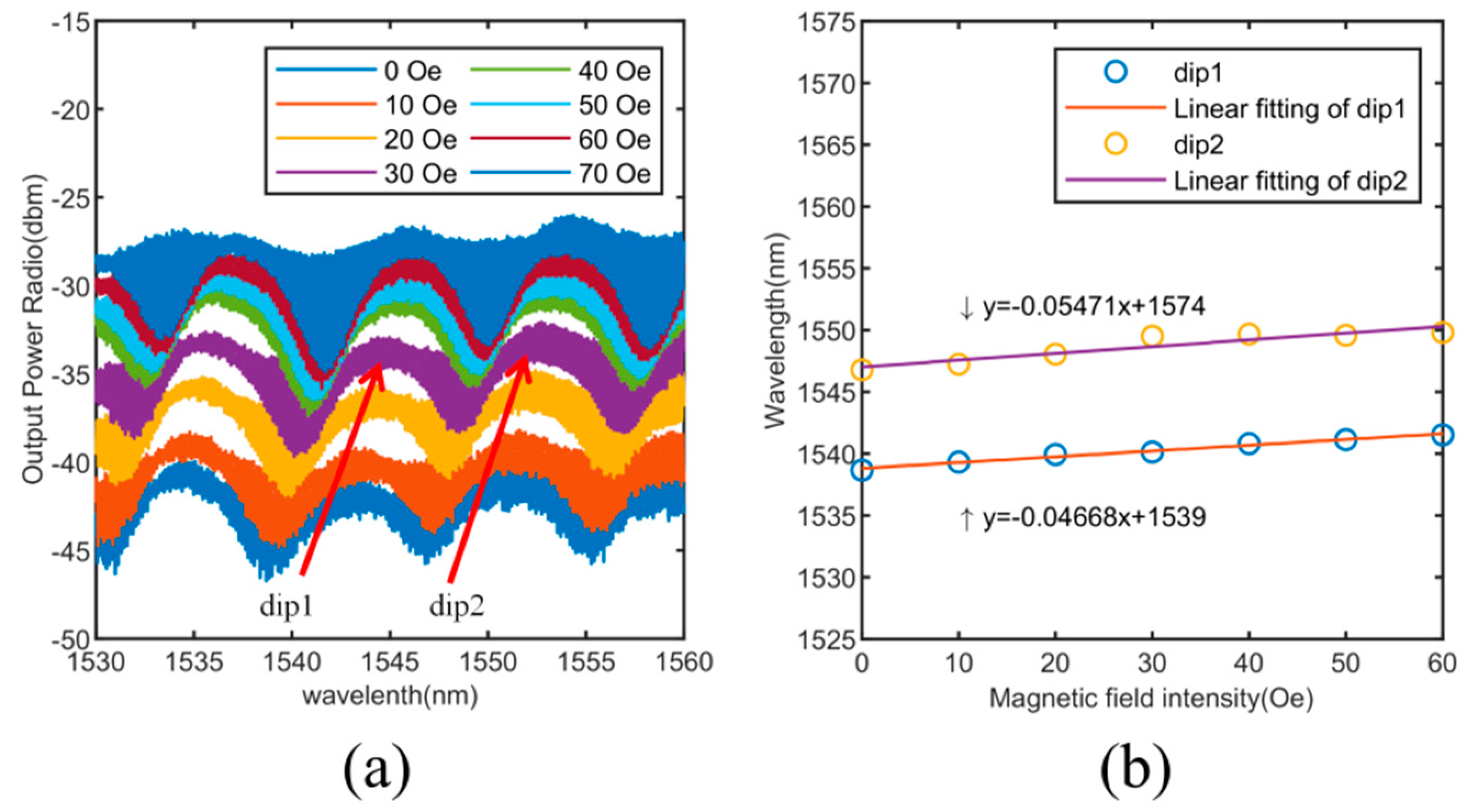
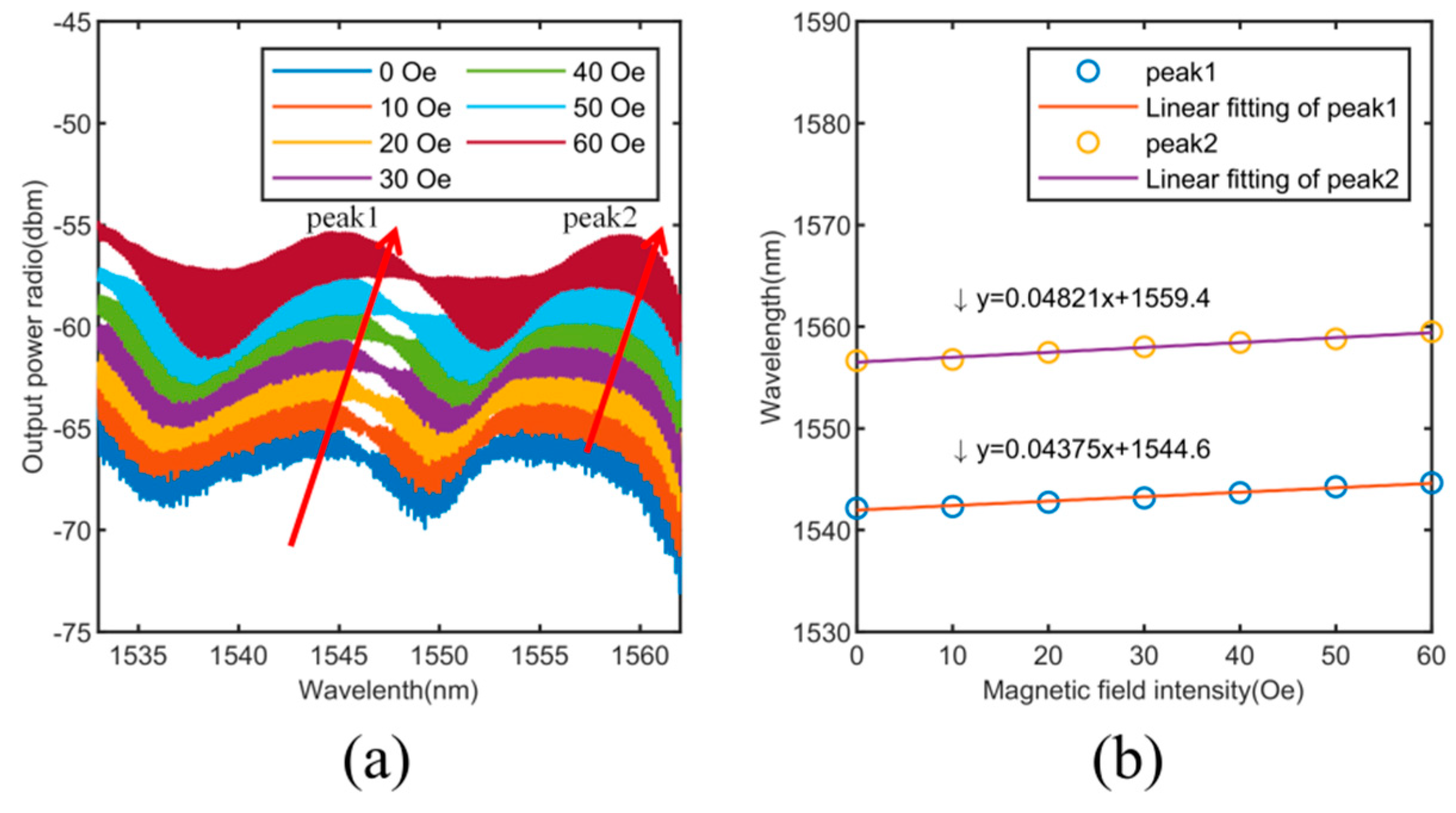
3.1. Magnetic Field Sensing Sensitivity Test
3.2. Test of Response Time
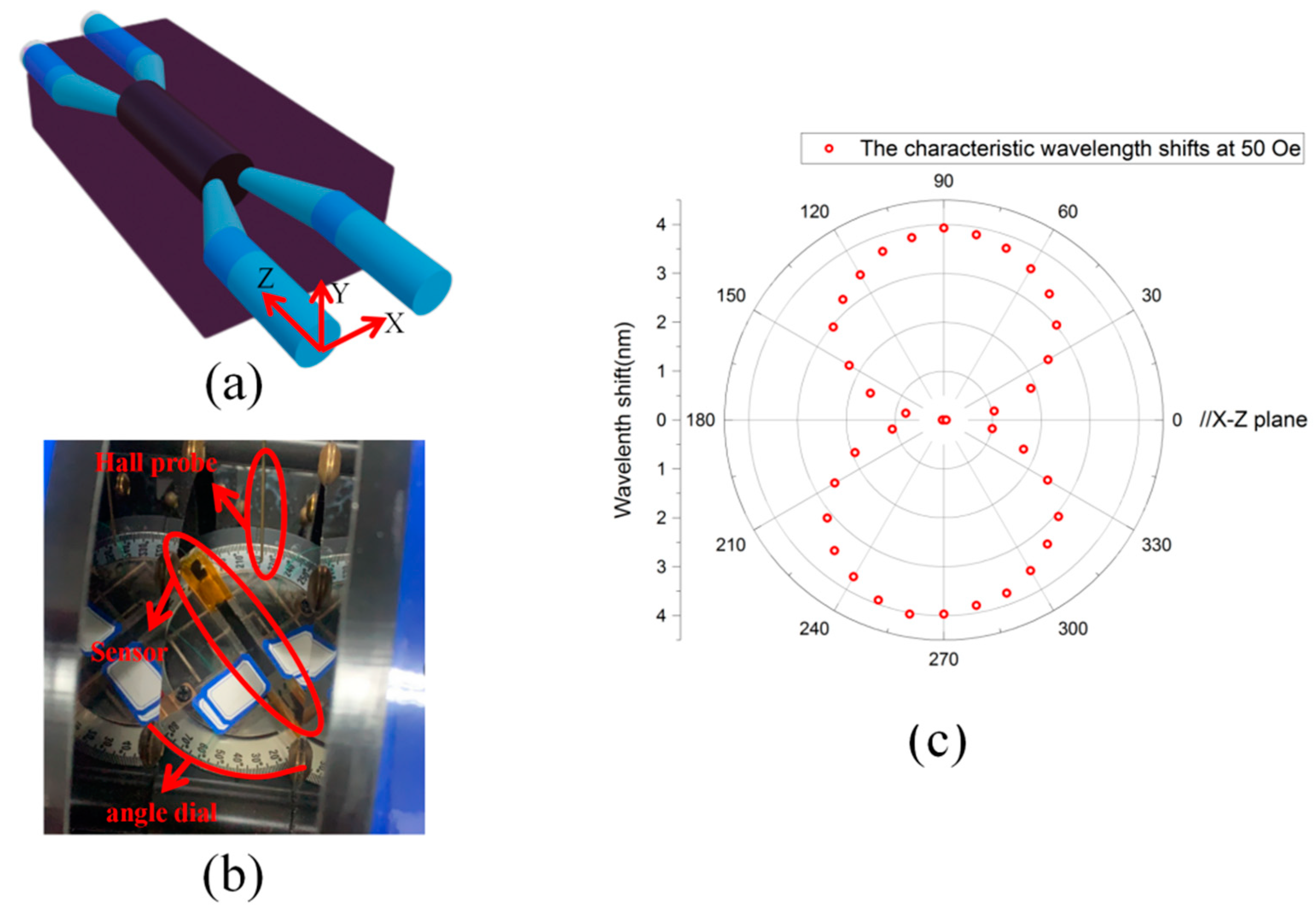
3.3. Test of Vector
4. Discussion
4.1. Influence of Interference Arm on Output Spectrum
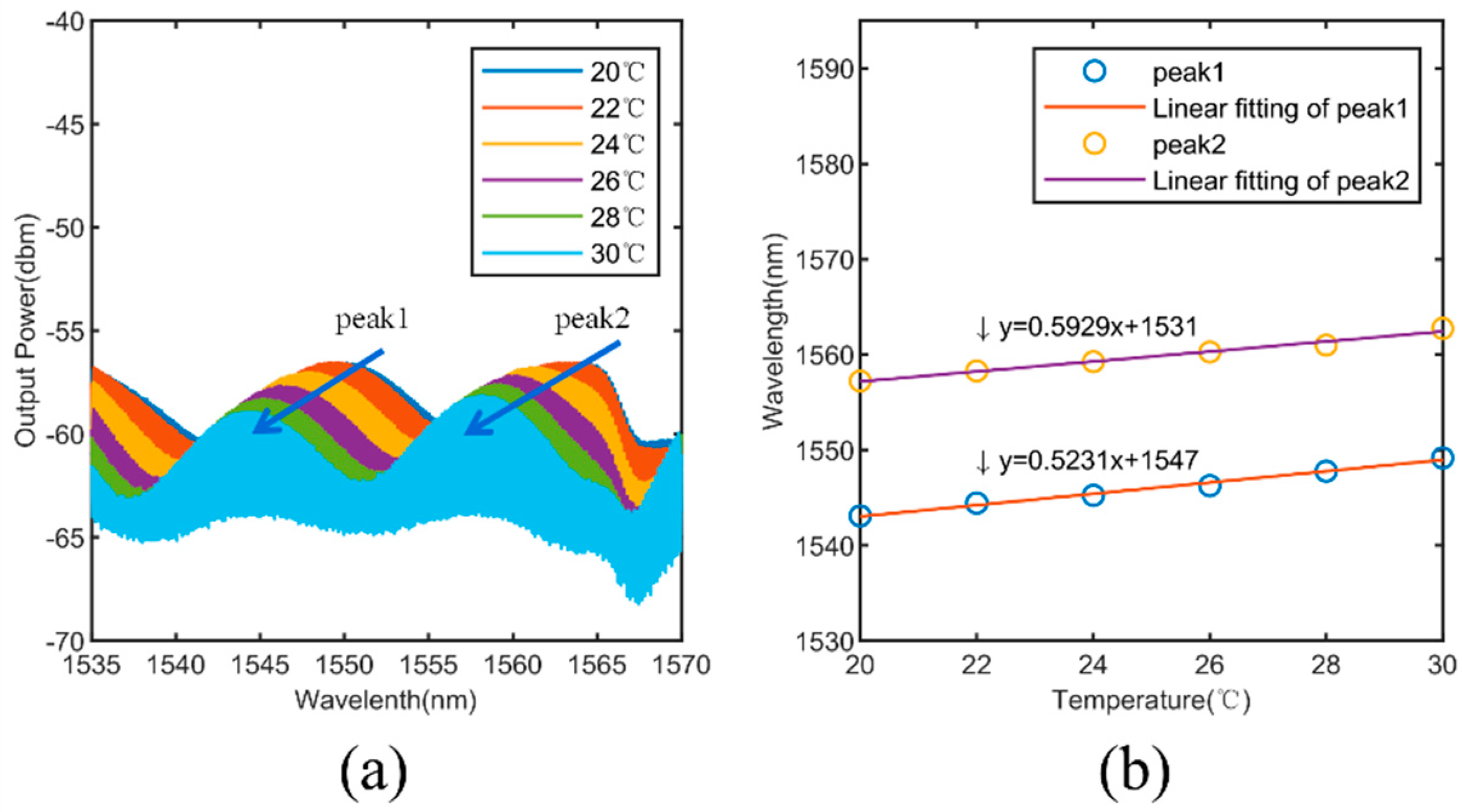
4.2. Dual-Parameter Demodulation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ilyas, M.; Cho, K.; Baeg, S.; Park, S. Drift Reduction in Pedestrian Navigation System by Exploiting Motion Constraints and Magnetic Field. Sensors 2016, 16, 1455. [Google Scholar] [CrossRef] [Green Version]
- Phan, M.; Peng, H. Giant magnetoimpedance materials: Fundamentals and applications. Prog. Mater. Sci 2008, 53, 323–420. [Google Scholar] [CrossRef]
- Murzin, D.; Mapps, D.J.; Levada, K.; Belyaev, V.; Omelyanchik, A.; Panina, L.; Rodionova, V. Ultrasensitive Magnetic Field Sensors for Biomedical Applications. Sensors 2020, 20, 1569. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, Q.; Zheng, J.; Xu, H.; Xu, B.; Chen, R. Roadside Magnetic Sensor System for Vehicle Detection in Urban Environments. IEEE Trans. Intell. Transp. 2018, 19, 1365–1374. [Google Scholar] [CrossRef]
- Feng, Y.; Mao, G.; Cheng, B.; Li, C.; Hui, Y.; Xu, Z.; Chen, J. MagMonitor: Vehicle Speed Estimation and Vehicle Classification Through A Magnetic Sensor. IEEE Trans. Intell. Transp. 2020, 1–12. [Google Scholar] [CrossRef]
- Billings, S.; Beran, L. Optimizing electromagnetic sensors for unexploded ordnance detection. Geophysics 2017, 82, EN25–EN31. [Google Scholar] [CrossRef]
- Huang, H.; Won, I.J. Automated anomaly picking from broadband electromagnetic data in an unexploded ordnance (UXO) survey. Geophysics 2003, 68, 1870–1876. [Google Scholar] [CrossRef]
- Martinović, D.; Bogdan, S.; Kovačić, Z. Mathematical Considerations for Unmanned Aerial Vehicle Navigation in the Magnetic Field of Two Parallel Transmission Lines. Appl. Sci. 2021, 11, 3323. [Google Scholar] [CrossRef]
- Maire, P.L.; Bertrand, L.; Munschy, M.; Diraison, M.; Géraud, Y. Aerial magnetic mapping with a UAV and a fluxgate magnetometer: A new method for rapid mapping and upscaling from the field to regional scale. Geophys. Prospect. 2020, 68, 2307–2319. [Google Scholar] [CrossRef]
- Peng, J.; Jia, S.; Bian, J.; Zhang, S.; Liu, J.; Zhou, X. Recent Progress on Electromagnetic Field Measurement Based on Optical Sensors. Sensors 2019, 19, 2860. [Google Scholar] [CrossRef] [Green Version]
- Sun, L.; Jiang, S.; Marciante, J.R. All-fiber optical magnetic-field sensor based on Faraday rotation in highly terbium-doped fiber. Opt. Express 2010, 18, 5407–5412. [Google Scholar] [CrossRef] [PubMed]
- Amirsolaimani, B.; Gangopadhyay, P.; Persoons, A.P.; Showghi, S.A.; LaComb, L.J.; Norwood, R.A.; Peyghambarian, N. High sensitivity magnetometer using nanocomposite polymers with large magneto-optic response. Opt. Lett. 2018, 43, 4615–4618. [Google Scholar] [CrossRef]
- Davino, D.; Visone, C.; Ambrosino, C.; Campopiano, S.; Cusano, A.; Cutolo, A. Compensation of hysteresis in magnetic field sensors employing Fiber Bragg Grating and magneto-elastic materials. Sens. Actuators A Phys. 2008, 147, 127–136. [Google Scholar] [CrossRef]
- Pu, S.; Mao, L.; Yao, T.; Gu, J.; Lahoubi, M.; Zeng, X. Microfiber Coupling Structures for Magnetic Field Sensing With Enhanced Sensitivity. IEEE Sens. J. 2017, 17, 5857–5861. [Google Scholar] [CrossRef]
- Bao, L.; Dong, X.; Zhang, S.; Shen, C.; Shum, P.P. Magnetic Field Sensor Based on Magnetic Fluid-Infiltrated Phase-Shifted Fiber Bragg Grating. IEEE Sens. J. 2018, 18, 4008–4012. [Google Scholar] [CrossRef]
- Li, X.; Zhou, X.; Zhao, Y.; Lv, R. Multi-modes interferometer for magnetic field and temperature measurement using Photonic crystal fiber filled with magnetic fluid. Opt. Fiber Technol. 2018, 41, 1–6. [Google Scholar] [CrossRef]
- Luo, L.; Pu, S.; Tang, J.; Zeng, X.; Lahoubi, M. Highly sensitive magnetic field sensor based on microfiber coupler with magnetic fluid. Appl. Phys. Lett. 2015, 106, 193507. [Google Scholar] [CrossRef]
- Zhou, L.; Yu, Y.; Huang, H.; Tao, Y.; Wen, K.; Li, G.; Yang, J.; Zhang, Z. Salinity Sensing Characteristics Based on Optical Microfiber Coupler Interferometer. Photonics 2020, 7, 77. [Google Scholar] [CrossRef]
- Chen, Y.F.; Yang, S.Y.; Tse, W.S.; Horng, H.E.; Hong, C.; Yang, H.C. Thermal effect on the field-dependent refractive index of the magnetic fluid film. Appl. Phys. Lett. 2003, 82, 3481–3483. [Google Scholar] [CrossRef]
- Zhang, H.; Dong, Y.; Leeson, J.; Chen, L.; Bao, X. High sensitivity optical fiber current sensor based on polarization diversity and a Faraday rotation mirror cavity. Appl. Opt. 2011, 50, 924. [Google Scholar] [CrossRef] [PubMed]
- Hou, Y.; Wang, J.; Wang, X.; Liao, Y.; Yang, L.; Cai, E.; Wang, S. Simultaneous Measurement of Pressure and Temperature in Seawater with PDMS Sealed Microfiber Mach-Zehnder Interferometer. J. Lightw. Technol. 2020, 38, 6412–6421. [Google Scholar] [CrossRef]
- Tong, L.; Lou, J.; Mazur, E. Single-mode guiding properties of subwavelength-diameter silica and silicon wire waveguides. Opt. Express 2004, 12, 1025–1035. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Pu, S.; Zhao, Y.; Zhang, R.; Jia, Z.; Yao, J.; Hao, Z.; Han, Z.; Li, D.; Li, X. All-fiber-optic vector magnetic field sensor based on side-polished fiber and magnetic fluid. Opt. Express 2019, 27, 35182. [Google Scholar] [CrossRef] [PubMed]
- Tian, H.; Song, Y.; Li, Y.; Li, H. Fiber-Optic Vector Magnetic Field Sensor Based on Mode Interference and Magnetic Fluid in a Two-Channel Tapered Structure. IEEE Photonics J. 2019, 11, 1–9. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, S.; Lu, J.; Li, M.; Yu, Y.; Yang, J.; Zhang, Z. Magnetic Field Sensing Characteristics Based on Optical Microfiber Coupler Interferometer and Magnetic Fluid. Photonics 2021, 8, 364. https://doi.org/10.3390/photonics8090364
Qin S, Lu J, Li M, Yu Y, Yang J, Zhang Z. Magnetic Field Sensing Characteristics Based on Optical Microfiber Coupler Interferometer and Magnetic Fluid. Photonics. 2021; 8(9):364. https://doi.org/10.3390/photonics8090364
Chicago/Turabian StyleQin, Shangpeng, Junyang Lu, Minwei Li, Yang Yu, Junbo Yang, and Zhenrong Zhang. 2021. "Magnetic Field Sensing Characteristics Based on Optical Microfiber Coupler Interferometer and Magnetic Fluid" Photonics 8, no. 9: 364. https://doi.org/10.3390/photonics8090364
APA StyleQin, S., Lu, J., Li, M., Yu, Y., Yang, J., & Zhang, Z. (2021). Magnetic Field Sensing Characteristics Based on Optical Microfiber Coupler Interferometer and Magnetic Fluid. Photonics, 8(9), 364. https://doi.org/10.3390/photonics8090364