1. Introduction
Pressure-Sensitive Paint (PSP) is an optical pressure measurement technique widely used in wind tunnel testing [
1,
2,
3]; it enables the acquisition of pressure distributions on a model surface from one set of images without the need to drill pressure tap holes and to connect tubes inside the investigated wind tunnel model. Thus, it is an excellent measurement system for investigating wind tunnel models having a number of different configurations which are to be examined successively, as is the case for the DLR-F22 delta-wing model [
4] in the transonic wind tunnel in Göttingen (TWG). A great advantage of the PSP technique is that a surface pressure distribution over the whole model surface can be obtained quantitatively and with high spatial resolution. Two different measurement methods using PSP (the intensity [
3] and lifetime-based [
3,
5] methods) have already been applied to testing in various wind tunnels. The lifetime-based method makes use of the dependence of PSP luminescent lifetime on the pressure. Two types of lifetime-based methods have so far been used; one uses pulsed excitation, whereas the other uses continuously modulated excitation [
3]. In this study, we focus on a two-gate method using pulsed excitation. In the two-gate method, two luminescent images are acquired at different times relative to the excitation pulse so that images are available at different times on the luminescence excitation and decay curve. To achieve this, a pulsed excitation light source and a fast-shutter camera are required. Two different measurement strategies for the two-gate lifetime-based PSP have been reported in the literature so far: (a) if both gate images are acquired from a single excitation pulse, the method is referred to as the “single-shot lifetime technique” [
6]; (b) with the “on-chip accumulation” method [
7], the camera shutter is opened with a constant time delay after every excitation light pulse so that with multiple excitation pulses the resulting PSP luminescence images can be accumulated on the camera-sensor chip itself.
A major advantage of the lifetime-based method is that the relationship between the ratio of the two gated images and pressure is independent of the excitation light intensity distribution. Since both gate images are acquired only at wind-on conditions, problems arising from model deformation or displacement due to wind-on/wind-off differences do not occur. Nevertheless, in many cases of practical applications, spatial gate ratio variations (non-uniform lifetime patterns) have been observed [
8]. This spatial variation causes critical errors in the final pressure calculation. Therefore, one single gate ratio obtained also under wind-off conditions is required to correct for these non-uniform lifetime patterns [
9]. In recent years, groups at both universities and research establishments have made great progress in the development of different PSP lifetime measurement methods for wind tunnel testing, single-shot lifetime PSP, and on-chip accumulation lifetime PSP [
9,
10,
11,
12,
13,
14,
15,
16,
17,
18].
In 2016, Mébarki and Benmeddour reported [
19] a successful measurement using the PSP lifetime method in the NRC transonic (blowdown) wind tunnel on a so-called GBU-38 wind tunnel model, where the model was moved continuously (in pitch–traverse mode) at 3°/s, 6°/s or 9°/s. In their work, they used pulsed UV-LED systems in combination with CMOS-camera technology, with which PSP image acquisition rates of 49 Hz could be achieved for the single-shot lifetime method. In their work, they state [
19] (p. 2) that “the traditional lifetime method using on-chip accumulation … is not compatible with a continuously moving model”. The implications of this statement must be evaluated with due consideration paid to the chosen pitch–traverse rates (angular speeds). Furthermore, the model pitch–traverse rate chosen for a wind tunnel measurement also depends on the operating mode of the wind tunnel itself. For example, model traverse rates of just 0.1 °/sec are used in continuously operating transonic wind tunnels such as TWG [
20] or the European Transonic Windtunnel (ETW) [
21]. This low model traverse rate is one order of magnitude smaller than that mentioned by Mébarki and Benmeddour in their intermittently operating blowdown wind tunnel. At significantly smaller model traverse rates compared to those reported by Mébarki and Benmeddour, the possibility of using the traditional PSP lifetime method using on-chip accumulation for measurements with a continuously moving wind tunnel model should, therefore, be examined.
The traditional PSP lifetime method with on-chip accumulation has typically made use of CCD-sensor technology; CMOS-based cameras do not have this feature up to now. In 2015, the Sony Corporation (the top seller of CCD image sensors in 2014) announced the cessation of their CCD image sensor manufacturing by the end of March 2017, with the last shipments of their finished product being in March 2020 [
22]. Therefore, CCD-sensor technology, in the long term, will no longer be available for PSP measurements. Nevertheless, many universities and research establishments still have in use many such CCD cameras with on-chip accumulation technology. From the authors’ point of view, the investigation carried out here for the first time using CCD-camera technology with continuously moving wind tunnel models is still of scientific and industrial importance since this camera technology is still currently being used for wind tunnel measurements.
In this paper, the current status of the lifetime-based PSP method with on-chip accumulation using CCD-sensor technology on a continuously moving wind tunnel model is reported. The main topics of this work are (i) the optimization of the camera and LED excitation source settings for high-quality PSP data generation whilst the wind tunnel model is moving in pitch–traverse or pitch–pause mode; (ii) the automation of data acquisition for high data productivity; and (iii) the achievement of accuracy and precision of the lifetime-based PSP method for the pitch–traverse and pitch–pause modes.
This current work reviews the first wind tunnel test campaign of the generic triple-delta wing model DLR-F22 in TWG and reveals the possibilities of using the lifetime-based PSP method for a continuously moving wind tunnel model in pitch–traverse mode.
4. Results from the Wind Tunnel Experiment
In the following images, the flow is from left to right. The same color map is used for all presented pressure distribution (pressure coefficient Cp) figures in this chapter. In all the presented images, the blue areas indicate low pressure, whereas the red areas indicate a higher pressure. Areas presented in black color could either not be acquired with the installed optical setup from the camera (forebody) or were not sufficiently excited by UV light from the installed LED systems (on the port side) to obtain usable luminescence images. The colormap applied to show the PSP results are also shown in each Figure.
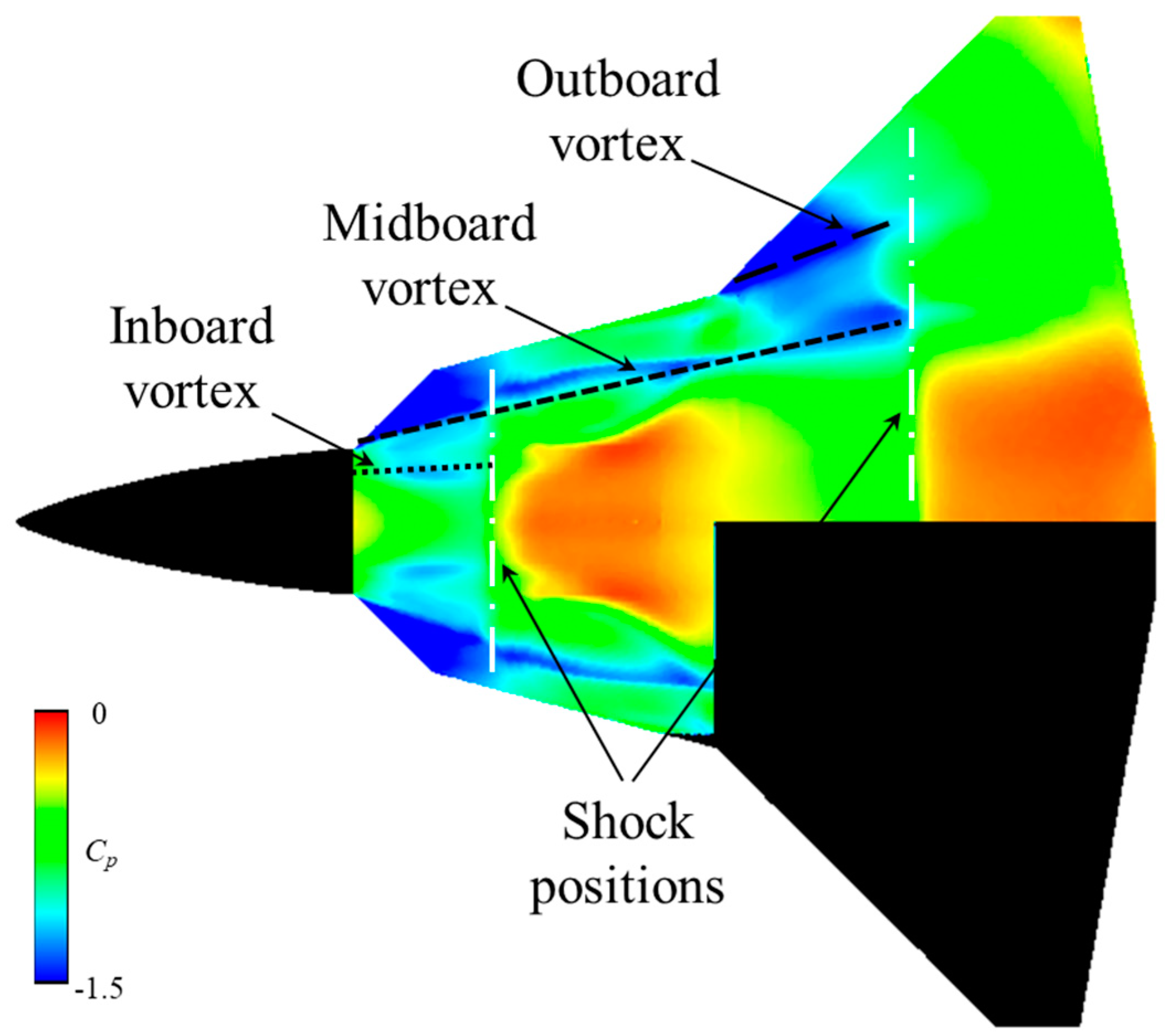
By means of PSP, the shape and position of leading-edge vortices can be measured easily since the induced suction of vortical flow imprints characteristic pressure signatures (footprints) onto the wind tunnel models’ surface. Some accompanying phenomena, e.g., vortex breakdown, secondary vortex structures, and vortex–shock interaction, can also be detected when PSP is applied. Thus, PSP provides valuable insights into the aforementioned phenomena and their evolution throughout a large angle-of-attack and Mach number range. The general flow structure that develops at the DLR-F22 model remains qualitatively similar for a large range of angles-of-attack and Mach numbers. For one case, M = 0.85,
α = 16°, and
β = 0°, the pressure distribution measured by means of PSP is shown in
Figure 8, and the herewith measured footprints of the flow field will be discussed. The flow structure is dominated by three primary vortices that originate along the leading edges of the forebody, the strake, and the main wing. These vortices are named as inboard vortex, mid-board vortex, and outboard vortex, respectively. The positions and spatial locations of the aforementioned vortices are shown in
Figure 8 as a black dotted line (inboard vortex), a black dashed line (mid-board vortex), and a black long-dashed line (outboard vortex). Additionally, shocks from above the strake and main wing can clearly be recognized from the PSP image. A first shock is visible behind the kink from the levcon to the strake, and the second shock is located further downstream on the main wing. Their spatial locations are highlighted as white dash–dot lines in
Figure 8. Interaction of shocks with the vortices causes shock-induced vortex breakdown that can also be easily detected from the PSP image. More details regarding the basic flow structure of the DLR-F22 model can be found in [
4].
There are already copious pressure data available from wind tunnel experiments using the DLR-F22 model; here, continuous lifetime PSP data acquisition by means of the on-chip accumulation technique during the pitch–traverse sweep has been carried out for the first time. As already mentioned, 150 pressure images were measured in 100 s during a pitch–traverse sweep from α = 15→25°; however, only a small selection of these 150 PSP result images will be shown and discussed here. The PSP results using the pitch–traverse mode are compared here to those that were measured in pitch–pause mode. For an image-based comparison of the measured flow topologies, PSP result images were selected for Mach numbers M = 0.85, 0.95, and 1.1 with an angle-of-attack of α = 16° and a yaw angle of β = 0°.
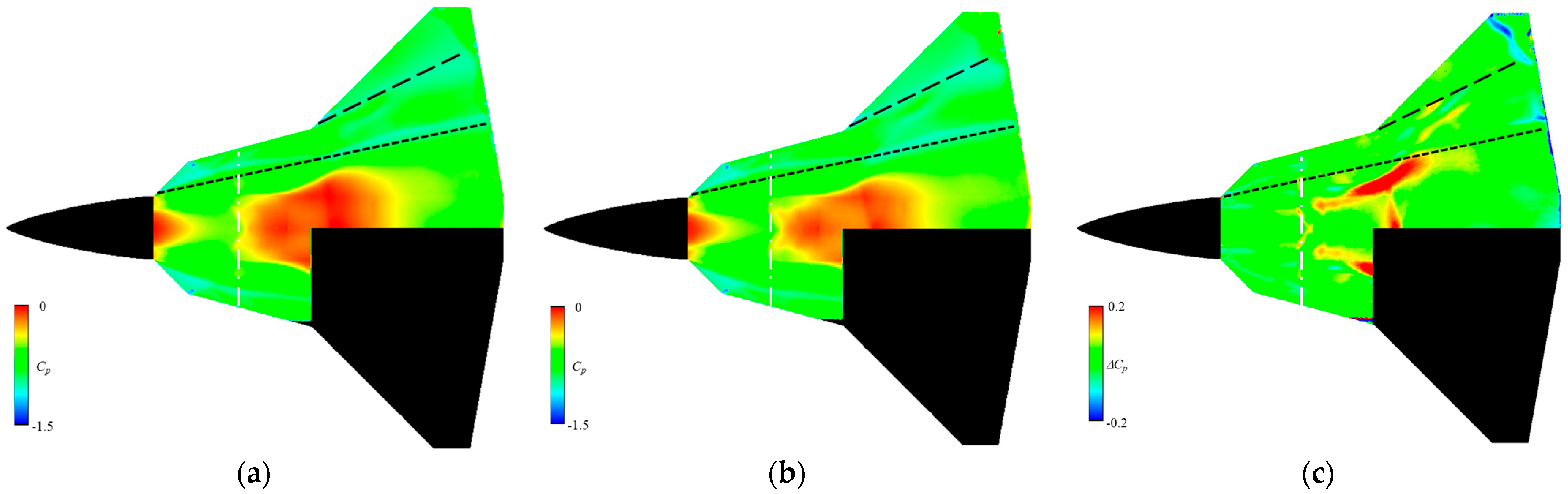
Figure 9 shows PSP result images for M = 0.85, with (a) showing the PSP result image using the pitch–pause mode (same as in
Figure 8) and (b) the PSP result image obtained during the pitch–traverse mode. The three primary vortices (in-, mid-, and outboard vortex) are clearly visible in (a) and (b), and the shock positions can also be clearly seen in both images. In all the following discussed PSP result images, the in-, mid-, and outboard vortices, as well as the shock positions, are shown using the same assignment of black or white lines, as first introduced in
Figure 8. For a better comparison of the flow topology in the PSP result images, the black and white lines for the PSP result image obtained in pitch–pause mode are copied into the PSP result image for pitch–traverse mode. This makes it possible to see immediately whether the vortex axes and shock positions have been measured at identical positions. Looking at the result images in
Figure 9a,b, it is noticeable that the vortex axes of the three primary vortices and the upstream shock in the area of the levcon correspond very well locally. However, the downstream shock position in
Figure 9b has slightly been shifted upstream.
For a better comparison of the results shown in
Figure 9a,b and to determine differences arising from the two different data acquisition modes,
Figure 10a shows the
Cp-difference image (Δ
Cp =
Cp, pitch–pause −
Cp, pitch–traverse) obtained by subtraction of the two images, and also includes the black and white lines for orientation, as explained before. As is to be expected for a vortex- and vortex-shock-dominated unsteady flow field, pressure differences can be seen in this difference image. Maximum differences of Δ
Cp = ±0.2 can be seen in the area of the shocks above the main wing and in the area of the (outboard) vortex-shock interaction. However, outside this area on the strake, levcon, and the main wing, the essential physical flow characteristics, their local position, and also the measured pressure distributions match very well. The resulting image shown in
Figure 9a has been averaged from 5 individual image pairs (
Ron =
IGate1/
IGate2); see
Section 3.2.1. Averaging of 5 image pairs allows the calculation of the root mean square (RMS) value. Here, the RMS value is calculated for those images with the highest pressure sensitivity, which are the Gate2 images, according to Equation (3).
where <
IGate2> is the mean value of the five individual
IGate2 images.
These RMS values are the largest in the region of transient or unsteady flow during the measurement acquisition time of 10 s.
Figure 10b shows the RMS
Gate2 result of the PSP result image shown in
Figure 9a. The largest RMS
Gate2 values have been measured for the outboard vortex in the area of vortex breakdown (vortex–shock interaction). Large fluctuations can also be seen in the area of the shock positions over the main wing and the levcon. The largest differences in the
Cp difference image (
Figure 10a) thus correlate very well with the areas of large RMS
Gate2 values in
Figure 10b.
Now, the obtained PSP results for the higher transonic Mach number of M = 0.95 will be compared. First of all,
Figure 11 shows the individual PSP results for the different data acquisition modes: (a) shows the PSP result image for the pitch–pause mode, and (b) shows the PSP result image for the pitch–traverse mode. In both PSP result images, the mid- and outboard vortex structures are clearly visible. In contrast, the inboard vortex is only very weakly visible in both cases. The shock positions and the associated shock-vortex interactions, which lead to vortex breakdown, are also clearly visible in both result images. Compared to the results shown for M = 0.85 in
Figure 9, it is noticeable for the M = 0.95 results that the measured suction peaks of the in-, mid-, and outboard vortices are weaker (lighter blue color in the result images). For this higher Mach number M = 0.95, the
Cp-difference image has also been calculated, and this result is shown in
Figure 11c. For this M = 0.95, the differences in results between both data acquisition modes are less pronounced than for M = 0.85. There are, again, local differences in the vicinity of the shock positions and the vortex breakdowns, but the spatial extent of these differences is significantly smaller for M = 0.95 compared to M = 0.85. There are also some differences very close to the trailing edge of the model, but these can be explained by impurities (oil) on the lower of the model.
Finally, in
Figure 12, also the individual PSP results for the supersonic Mach number M = 1.1 with
α = 16°,
β = 0°are presented for the two different data-acquisition modes: (a) shows the PSP result image for the pitch–pause mode and (b) shows that for the pitch–traverse case. The pressure signature of mid- and outboard vortices is clearly visible in both presented PSP results, whereas an inboard vortex cannot be seen (at least not with the chosen colormap) in the PSP results. Pressure signatures of mid- and outboard vortices are visible up to the trailing edge of the main wing. Compared to the previously discussed PSP results for the transonic Mach number, it is obvious that for the supersonic Mach number, the vortex breakdown does not occur above the main wing, and furthermore, only one shock position has been detected. Compared to the results shown for M = 0.85 and 0.95 in
Figure 9 and
Figure 11, it is noticeable for the supersonic M = 1.1 PSP results that the measured suction peaks of the mid and outboard vortices are much weaker. For the highest tested Mach number M = 1.1, the
Cp-difference image has also been calculated, and this Δ
Cp result is shown in
Figure 12c. Overall, there is very good agreement between the results shown for both data acquisition modes (a) and (b). Only in the area of the shock are there again significant pressure differences, but these are again locally very limited and restricted to the area of unsteady flow phenomena.
Error Analysis
The wind tunnel model has been equipped with conventional pressure taps for steady pressure readings and Kulite
® sensors for unsteady pressure measurements, see
Figure 3a. For the measurements presented here, only the Kulite
® sensors for unsteady pressure measurements have been recorded during the continuous sweep of the wind tunnel model using the Dewetron
® system of the wind tunnel data-acquisition system. Data acquisition using the conventional pressure taps did not take place in the measurement campaign presented here. However, since the PSP data acquisition system for the conventional pitch–pause method is identical to that presented in [
17] and [
26], a standard error in Δ
P of 600 Pa is also to be expected here for the trans- and supersonic results presented in
Figure 8,
Figure 9a,
Figure 11a and
Figure 12a.
To specify the uncertainty of the PSP results during the continuous movement of the wind tunnel model (pitch–traverse mode), the pressure distribution measured by means of PSP is considered in the local area around all the Kulite® sensors. This is possible because all PSP results are mapped onto the surface grid of the wind tunnel model, and therefore, the exact local area around the Kulite® sensors can be considered.
By way of example, error analysis has been carried out and is shown here for the case M = 0.85; see
Figure 13a: for all 150 data points acquired with PSP (15 ≤
α ≤ 25°,
β = 0°), the PSP pressure values (in kPa) are shown on the abscissa and the corresponding Kulite
® results (also in kPa) on the ordinate. The various angles of attack can be identified with the help of the symbol color map in the figure, where low to high
α is coded as ranging from blue- to red-colored symbols, respectively. Fortunately, the relationship is linear over the entire measured angle-of-attack range, indicating that there is no particularly problematic angle-of-attack range that needs to be considered separately in the error analysis. The error can, therefore, be specified covering the entire data series of measurements. For this purpose, the pressure difference (PSP-to-Kulite
®) has been plotted in
Figure 13b as a function of the angle of attack. One can see some outliers in the range 16° ≤
α ≤ 17°, where larger errors of up to ±4 kPa can be seen. This may be related to the fact that the mid-board vortex, which for this angle-of-attack range propagates approximately in the direction of the Kulite
® sensor locations (see
Figure 9b), produces locally strong transient/unsteady pressure differences in the area of these Kulite
® sensors. Statistically, this leads to a measurement error of Δ
P = 790 Pa. It must be emphasized here that the PSP results can be compared with only the four available Kulite
® sensors so that the statistical sample size is not particularly large. Interestingly, the result of the error analysis obtained for the pitch–traverse mode is of the same size as for the pitch–pause mode, so with some confidence, the value given here can be considered plausible.
5. Conclusions and Outlook
Lifetime-based pressure measurements by means of PSP using on-chip accumulation on the DLR-F22 triple-delta wing model have been performed in the transonic wind tunnel TWG for trans- and supersonic Mach numbers. PSP images were acquired when the wind tunnel model was moved in pitch–pause mode (standard approach) and, alternatively and for the first time, in pitch–traverse mode. The data acquisition strategies for both modes have been presented and the applied data reduction was shown. The pressure distributions obtained by PSP for the different data-acquisition approaches were shown for trans- and supersonic Mach number cases and some selected angles-of-attack and yaw angles. In general, the results for both data-acquisition modes agree very well and primary vortices and shock positions could be easily detected. When comparing the corresponding data points for the two different data acquisition modes individually, one can see small differences, for example, in locations and extent of vortex breakdown, shock position, or shock–vortex interaction. Since these measurements were performed on a model configuration at high angles-of-attack and at trans- and supersonic flow conditions, noticeable unsteady flow is to be expected and was, in fact, indeed observed in the pitch–pause pressure data, which allows RMS analysis of the pressure and thus provided an insight into the unsteadiness of the flow. By application of the PSP lifetime technique in combination with the pitch–traverse sweep of the wind tunnel model, the productivity of the data acquisition (in terms of measurement per unit time) could be increased to ≥1.5 Hz compared to <0.1 Hz for the standard pitch–pause mode, viz. an increase by a factor of 15. The accuracy of ΔP = 790 Pa achieved for PSP data acquisition in pitch–traverse mode is similar to that of pitch–pause mode (ΔP = 600 Pa). In summary, the lifetime-based PSP data acquisition technique using on-chip accumulation was applied successfully in a wind tunnel test whilst the model was moving in pitch–traverse mode during the measurement.
For future PSP tests where many model configurations need to be investigated or when a wind tunnel model is to be investigated for the first time in a wind tunnel, the application of the lifetime-based PSP measurement technique presented here in combination with continuous model movement (pitch–traverse sweep) can be recommended to enable more efficient use of tunnel runtime to be made.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}