1. Introduction
The electro-optical tracking platform is a complex and high-precision directional tracking system integrating optical, mechanical and electrical properties. It is widely used in long-distance laser communication, quantum communication, inertial measurement unit and other fields [
1,
2,
3,
4]. The electro-optical tracking platform is mainly used to realize real-time precision tracking and measuring of moving targets. However, it is often affected by external disturbances and internal uncertainties in engineering control applications. These disturbances seriously affect the stability performance and control effect of the system and may even cause instability of the closed-loop system. Therefore, many researchers are devoted to dealing with the disturbance and internal uncertainty of electro-optical tracking systems [
5,
6,
7]. In general, the aforementioned disturbance suppression methods of electro-optical tracking platforms can be classified into the following two categories. The first category is a multiloop feedback control system composed of high-sampling-rate inertial sensors, such as the micro-electro-mechanical system (MEMS) accelerometers, fiber optical gyroscopes (FOG) and high-resolution position detectors. The disturbance suppression capabilities of the multiloop feedback control system is the superposition of the effects of each loop, but this method is insufficient for disturbance suppression capacity or dealing with internal uncertainty, and it can only provide basic disturbance suppression [
8,
9]. More seriously, when suffering from strong disturbances, the controlled variables might have too large fluctuations, which could even lead to instability of the closed-loop system. The second category mainly uses the direct feedforward method based on measurement to suppress disturbance. This method requires accurate identification of disturbance transfer characteristics outside the system. However, it is hard or even impossible to measure the disturbances in many actual processes, including the inertial uncertainty. Therefore, it is of practical interest to improve the disturbance rejection ability of the stable control platform to be able to observe and compensate for the disturbance source [
10].
Based on the above situation and to further improve the disturbance suppression ability of the system, disturbance-observer-based control (DOBC) is introduced into the electro-optical tracking system in this paper. And this method, based on DOBC, does not require accurate model information [
11,
12]. In practical applications, the electro-optical tracking system requires motion tracking of the position, velocity or acceleration curve of a given time series with a certain precision. Meanwhile, the electro-optical tracking system must also meet certain control performance indicators, such as minimum tracking time and minimum cost. In this way, the system can track the specified trajectory faster, more accurately and more effectively. As we know, there is little research on the optimal tracking control of electro-optical tracking systems subject to external disturbances. At present, various optimal control methods are popular in the control field, including linear quadratic regulator optimal control (LQR), adaptive dynamic programming control [
13,
14], etc., to achieve ideal dynamic and steady-state performance.
The LQR is a well-known design technique in modern optimal control theory and has been widely used in many applications [
15,
16]. In contrast with pole placement, the desired performance objectives are directly addressed by minimizing a quadratic function of the state and control input. The resulting optimal control law has many excellent properties, including closed-loop stability. Furthermore, the trade-off between state regulatory requirements and control energy consumption in the LQR can be controlled by choosing the weighting matrices
and
[
17,
18,
19]. However, the solution to the LQR problem depends on solving the Riccati equation. Before solving the Riccati equation, designers often need to determine some undetermined parameters in advance. The selection of these parameters will not only affect the quality of the conclusion but also affect the solvability of the problem, which brings great conservatism to the solution of the problem. Meanwhile, there are still some problems in solving the Riccati equation itself. At present, there are many methods for solving the Riccati equation, but most of them are iterative methods, and the convergence of these methods cannot be guaranteed.
In view of the above problems, linear matrix inequality (LMI) technology can be well solved [
20,
21]. One advantage of using LMI is that it makes it easy to include other specifications for controller design [
22,
23]. Therefore, various design specifications can be rewritten into the LMI, and the resulting LMI constraints can be efficiently solved using newly developed convex optimization algorithms.
In this paper, a LQR-DOB tracking control method to achieve the optimal tracking of the desired trajectory under the condition of modeling error and uncertain disturbance is proposed. In summary, the contribution of this paper is as follows:
This paper proposes the LQR-DOB tracking control method, which solves the uncertainty of the model and the instability of the system caused by uncertain disturbance;
Using standard techniques, the DOB gain and LQR controller gain of the tracking reference model design is reduced to a convex constraint problem, which can be efficiently solved with the LMI approach;
The stability constraint of the electro-optical tracking closed-loop system is considered by using Lyapunov theory in the LMI framework;
Compared with other control methods, the disturbance suppression ability and dynamic response performance of the system, such as rise time, settling time and system overshoot, have been significantly improved under the proposed method.
The rest of this paper is organized as follows. In
Section 2, the electro-optical tracking platform is modeled. In
Section 3, the LQR-DOB tracking controller is designed and analyzed. In
Section 4, the simulated and experimental results are presented. In
Section 5, the direction of future work is pointed out. Finally,
Section 6 concludes the paper.
2. Modeling of The Electro-Optical Tracking Platform
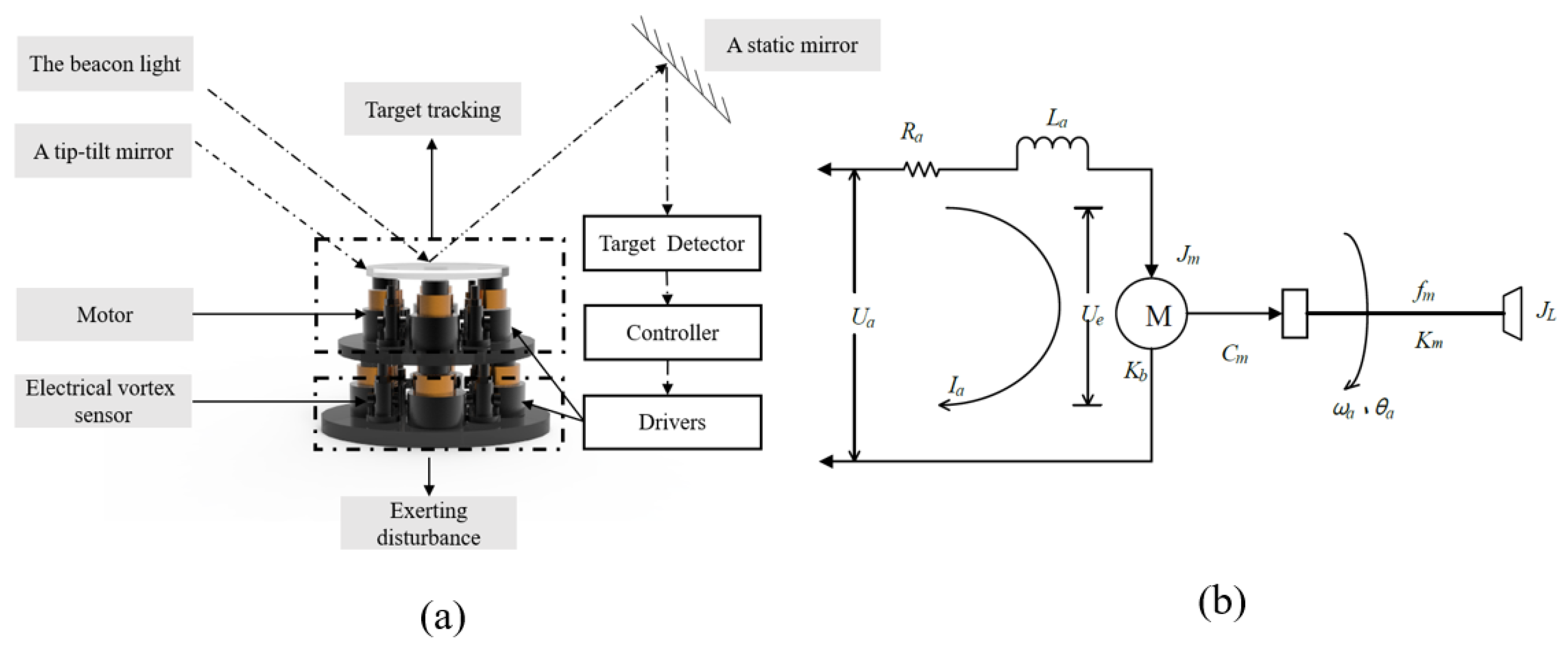
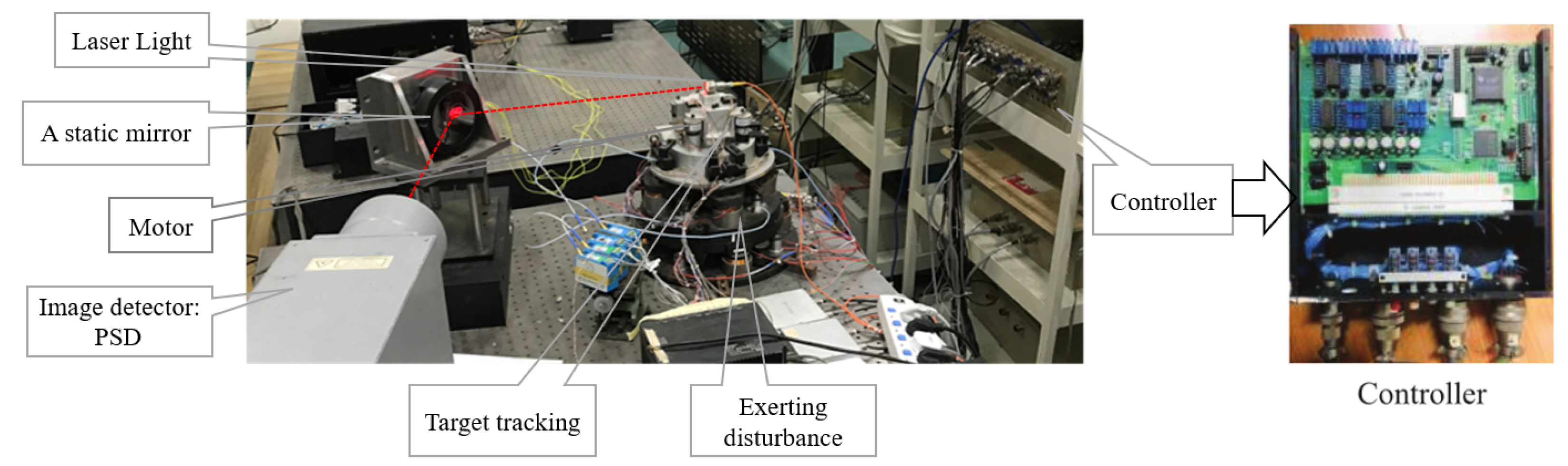
The main structure of the electro-optical tracking stable platform is shown in
Figure 1a. A detector such as PSD receives the beacon of light reflected by the tip-tilt mirror and sends the position error signal to the controller. The controller calculates the correction angle of the mirror, and then through the D/A converter, the output of the controller drives the motors connected to the mirror. The aim is to stabilize the light at the center of the detector by rapidly deflecting the mirror under the influence of the disturbance.
Mathematical modeling is the foundation of control. In
Figure 1b, using the potential plus the torque balance equation, we obtain
where
are the motor voltage, current, resistance, inductor, back electromotive force coefficient, torque coefficient, viscous friction and spring stiffness, respectively. Meanwhile,
are the load inertia and the relative position angle of the motor-driven tilt mirror, respectively. Then, the controlled system plant can be modeled as
Moreover, it can also be factorized with the typical resonance element and inertia element, which is
where
.
are the damping ratio and natural frequency of the open-loop system, respectively.
K is the system open-loop gain. And
T is the parasitic time constant.
Since the inertia element in the controlled plant only affects the characteristics of the high-frequency part of the electro-optical tracking platform, the frequency characteristics from the voltage input
to the angle output
can be approximated to a typical resonance element. Therefore, the general form of the controlled system object for low and intermediate frequencies can be expressed as
where the meanings of
a,
b and
K are consistent with those in Equation (
3). Convert the controlled system object in Equation (
4) into state-space equation form as
where
;
represent the position and speed of the system, respectively. However, in the actual working environment, the electro-optical tracking platform will not only be affected by external interference but its characteristics will also change with the change in attitude and load. Therefore, the electro-optical tracking system in Equation (
5) can be converted into
where
(
) denotes system state variable;
stands for the control input;
(
) is the controlled output;
denotes the parameter uncertainty; and
and
are the disturbances, where
is square integrable on
.
3. The LQR-DOB Tracking Controller
In this section, the LMI-LQR-DOB tracking controller is designed for the electro-optical tracking system with uncertainty and disturbance. The main objective of this work is to design a controller ensuring that the electro-optical tracking system can track the reference signal generated by the following model
where
denotes the state vector of the reference system, and
is the bounded reference input.
,
,
are known constant matrices, and
is Hurwitz.
The following assumptions, lemmas and definition are adopted throughout this work.
Assumption 1 ([
24]).
The system satisfies the controllable and observable condition, that is, is controllable and is observable. Assumption 2 ([
24]).
There exist two matrices , such that in the reference model in Equation (7) satisfies and . Assumption 3 ([
25]).
The uncertainty can be expressed as , where are known constant matrices, and is an unknown matrix satisfying . Lemma 1 ([
26]).
Assume that and are vectors or matrices with appropriate dimension. The following inequalityholds for any constant . Lemma 2 ([
26]).
Assume that and are symmetric matrices, and are vectors or matrices with appropriate dimension and . The following inequalityholds for any constant . Notations: The symmetric term is denoted as ∗, i.e.,.
Proof. Premultiplying and postmultiplying simultaneously by
and
with
yields
□
According to Lemma 2 and Equation (
10), for
, we have
Combining Equations (10) and (11), we have Equation (
9).
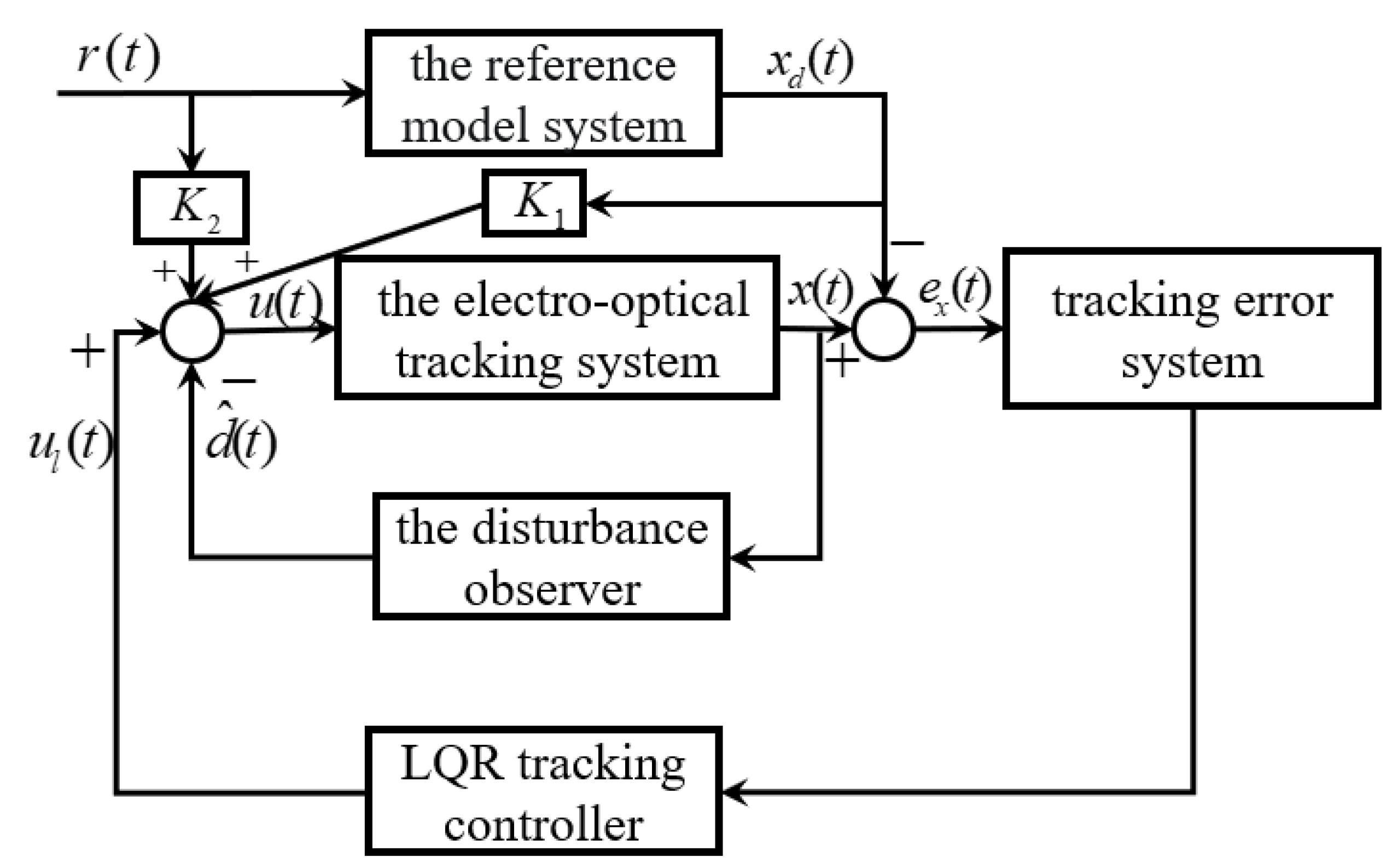
Lemma 3 Schur complement [25]: For a given symmetric matrix , where is dimensional and is dimensional. The following three conditions are equivalent: Defining the tracking error as and invoking equations in Equations (6) and (7), we have The controller
in
Figure 2 is designed as
where
is the reference model matching controller,
is an LQR tracking controller and
is the estimation of disturbance
.
The reference model matching controller is given by
where
are the gain matrices satisfying Assumption 2. Substituting Equations (13) and (14) into Equation (
12), we obtain
where
is the disturbance error vector.
The LQR tracking controller
is designed for the following error system:
For the error tracking system in Equation (
16) above, we consider an auxiliary function as
which is selected to design the LQR tracking controller
, where
is the semipositive definite state weighting matrix,
is the positive definite control weighting matrix and
is the gain of the LQR tracking controller.
The LQR tracking controller
is designed as
The above LQR tracking controller design problem can be expressed as the following optimization problem by LMI technology:
where
is the upper bound of the LQR performance index. Under the condition that Assumption 1 is satisfied, the above LQR tracking controller design problem is transformed into the following inequality relationship:
where
,
is the set of symmetric positive definite matrices;
,
is also the set of symmetric positive definite matrices;
,
is the set of
matrices; and
is the initial value of state variable
x, and the trace operator is defined as
with
.
By substituting the uncertainty
in Assumption 3 into Equation (
20) and using Lemma 3: (Schur Complement), we can further convert Equation (
20) to
Combining Equations (21)–(23), the gain of LQR tracking controller can be determined by setting
Then, we design the disturbance observer as
where
is the estimation of
,
denotes the auxiliary variable of the designed observer and
is the disturbance observer gain. The disturbance error system has the following form:
Combining Equations (7), (12) and (19), we have
where
,
.
Now, a Lyapunov function is chosen as
where
with
. The derivative of
along the closed-loop system Equation (
27) is
Then, introducing the auxiliary function as
The initial condition
is assumed to be zero. By using the fact that
and the Equation (
30), the term
becomes
where
.
Using the Lemma 1 and Lemma 2, we can obtain
, and the term
has the following form:
with
.
If
holds, we have
, i.e.,
. Defining
and applying Lemmas 2 and 3 to the inequality
, we obtain
with
Using the fact that
and
and invoking Equation (
28), if
holds, we have
If
and
, we have
Therefore, the augmented closed-loop system Equation (
27) is asymptotically stable under the following conditions:
where
can be further simplified to
Finally, the disturbance observer gain is obtained as by solving the Equations (33) and (37).
In view of the above discussion, the design process of the DOB-based LQR tracking controller is summarized as follows for easy reference:
Step 1: According to the controlled object in Equation (
39) and the reference model system in Equation (
40), the gain matrix in the reference model matching controller
by Assumption 2 is calculated;
Step 2: Set the LQR weighting matrix ; give the prescribed upper bound of LQR performance index and the value of input signal ; and determine the values of other parameters , etc;
Step 3: Compute the gain K of the LQR tracking controller by combining Equations (21)–(23);
Step 4: Compute the gain L of the disturbance observer by combining Equations (33) and (37).
At this point, the LQR-DOB tracking controller design of the electro-optical tracking system with uncertainty and disturbance is completed. Specifically, the disturbance observer is designed as Equation (
25) to estimate the disturbances; the reference model matching controller is designed as Equation (
14) to track the electro-optical tracking system in Equation (
6) with
performance; and the LQR tracking controller is designed as Equation (
18).
6. Conclusions
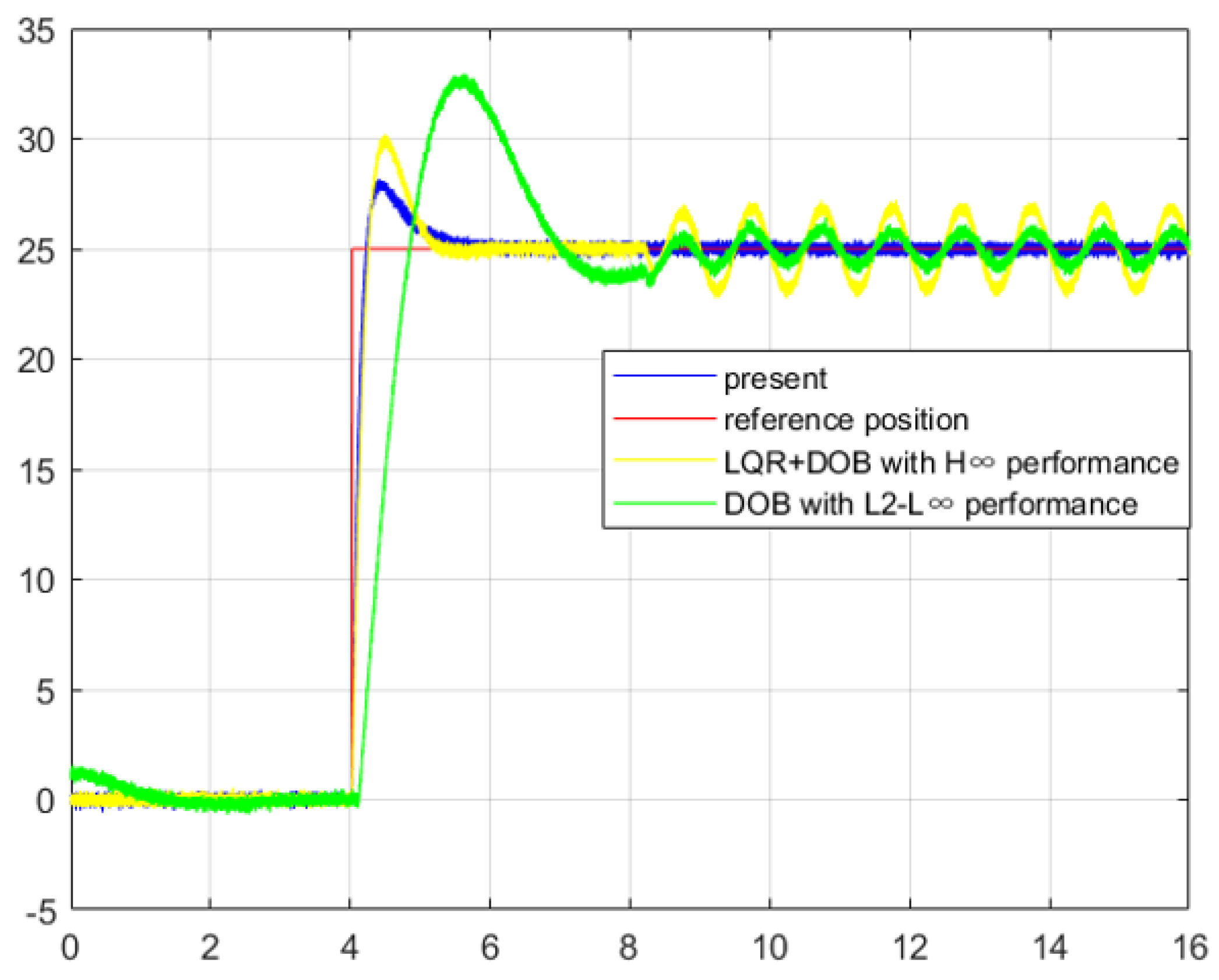
This paper presents an LQR-DOB tracking control method to solve the problems of modeling error and uncertain disturbance in an electro-optical tracking control system. Using standard techniques, the DOB gain and controller gain of the tracking reference model design is reduced to a convex constraint problem, which can be efficiently solved with the LMI approach. Meanwhile, the stability constraint of the electro-optical tracking closed-loop system is considered by using Lyapunov theory in this framework. Compared with the LQR + DOB with control method and the DOB with control method under the same disturbance condition, the method proposed in this paper can significantly improve the dynamic properties of the system, such as rise time, settling time and system overshoot. The improvement of the dynamic properties of the system is mainly due to the good frequency response characteristics of the LQR tracking controller. Meanwhile, the disturbance observer with performance index and the model reference tracking controller aim to enhance the robustness and disturbance suppression ability of the system. Specifically, compared with the other methods in this paper, the tracking accuracy and the disturbance suppression ability of the proposed method is about two to three times higher.
However, with the increase in target tracking maneuverability in the electro-optical tracking system, the tracking accuracy and disturbance suppression ability of the system under the proposed method are reduced. To meet the needs of the practical applications of electro-optical tracking systems, the next work of our paper is to further optimize the method in this paper and further solve the problem that the tracking accuracy and disturbance suppression ability of the system decline under the premise of strong tracking target mobility. Meanwhile, many practical constraints, such as controller saturation, will be considered in the next work of this paper. In general, the method proposed in this paper has important reference value for electro-optical tracking systems.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}