Multi-Objective Optimization for Submarine Cable Route Planning Based on the Ant Colony Optimization Algorithm

Abstract
1. Introduction
2. Models
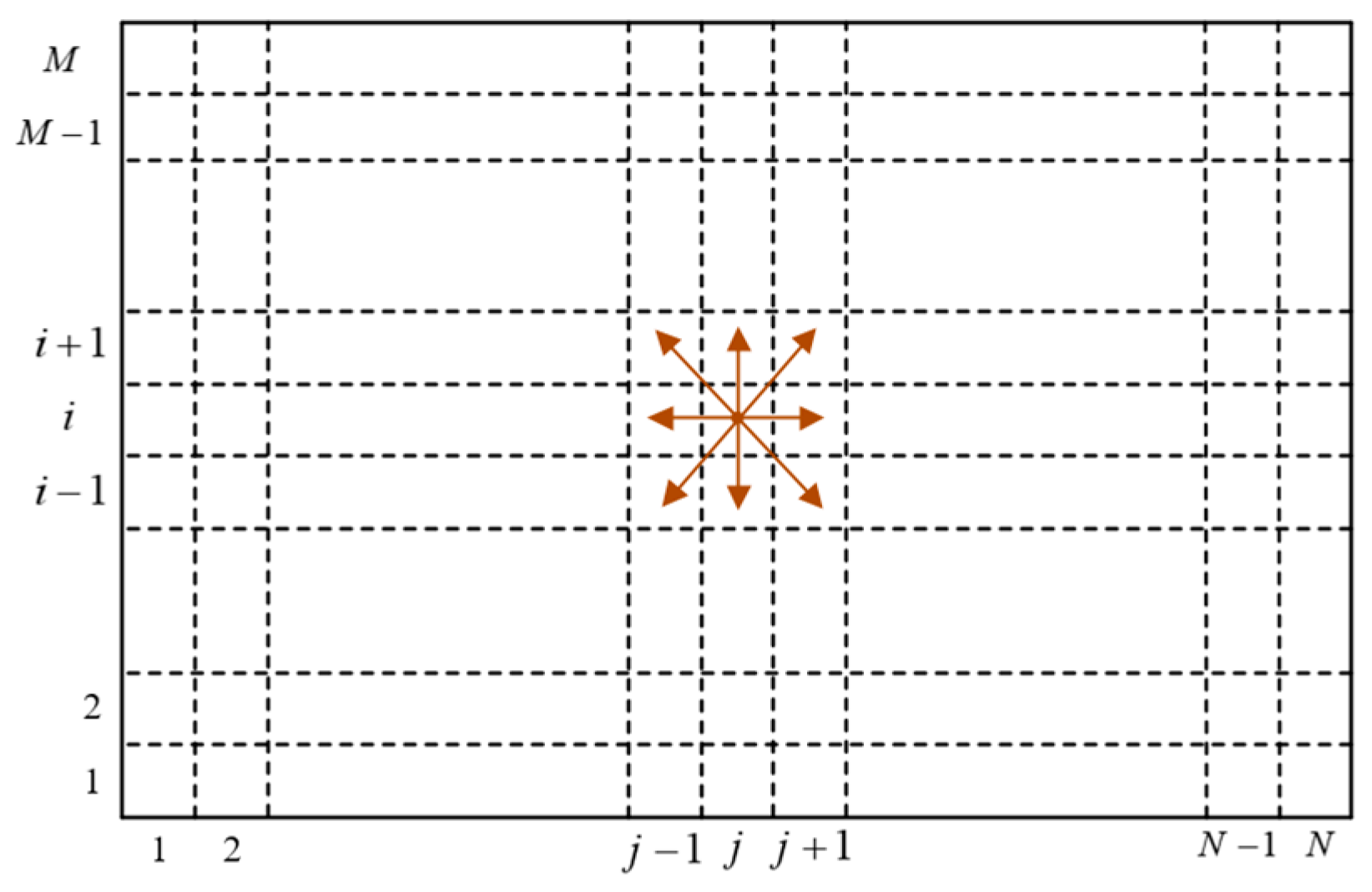
2.1. Model of Earth’s Surface
2.2. Model of Costs
- (1)
- Material costs
- (2)
- Construction costs
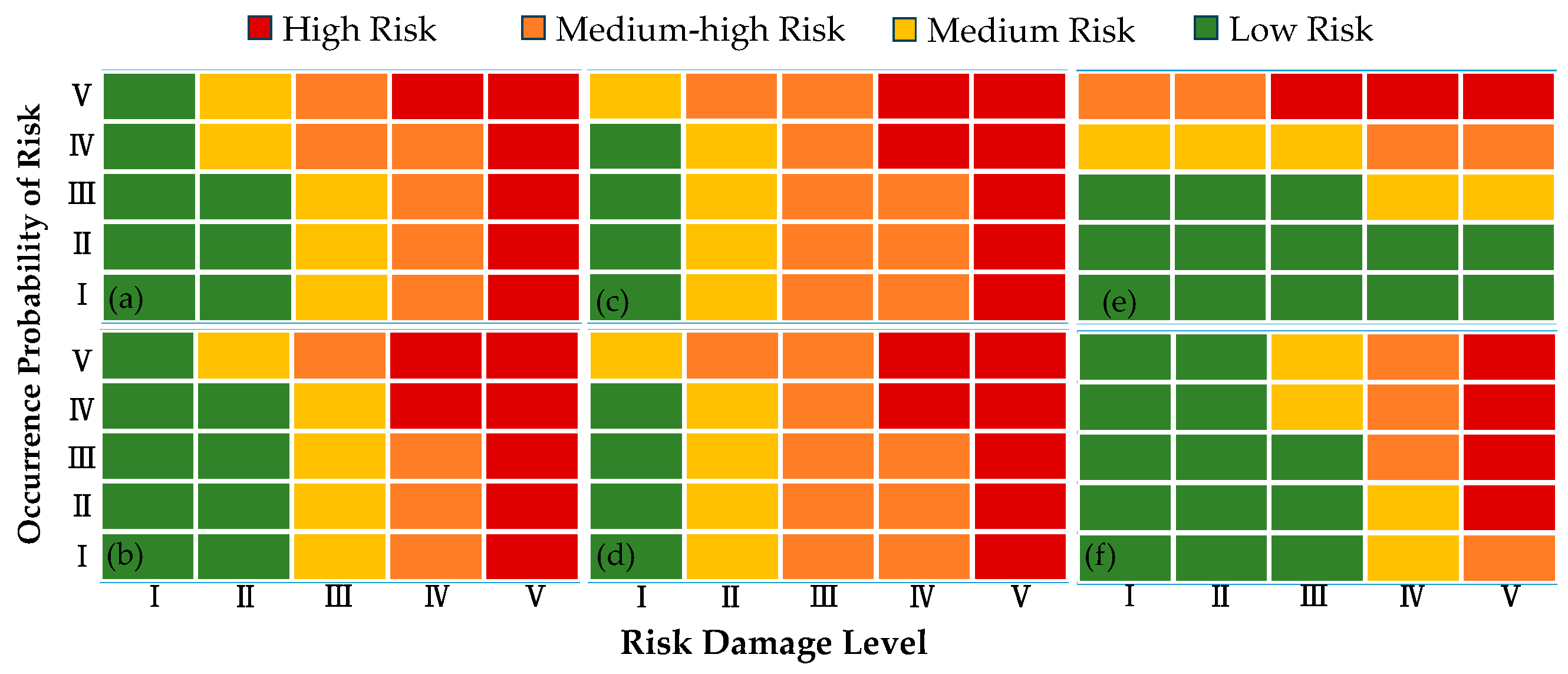
2.3. Model of Risk Assessments
- (1)
- Fishery activities
- (2)
- Shipping activities
- (3)
- Earthquakes
- (4)
- Volcanos
- (5)
- Submarine slope
- (6)
- Marine organisms
3. Problem Formulation and Solution
3.1. Multi-Objective Optimization
- subject to: ,
- ,
- , the number of segments containing does not exceed 2.
3.2. Solution
4. Results and Discussion
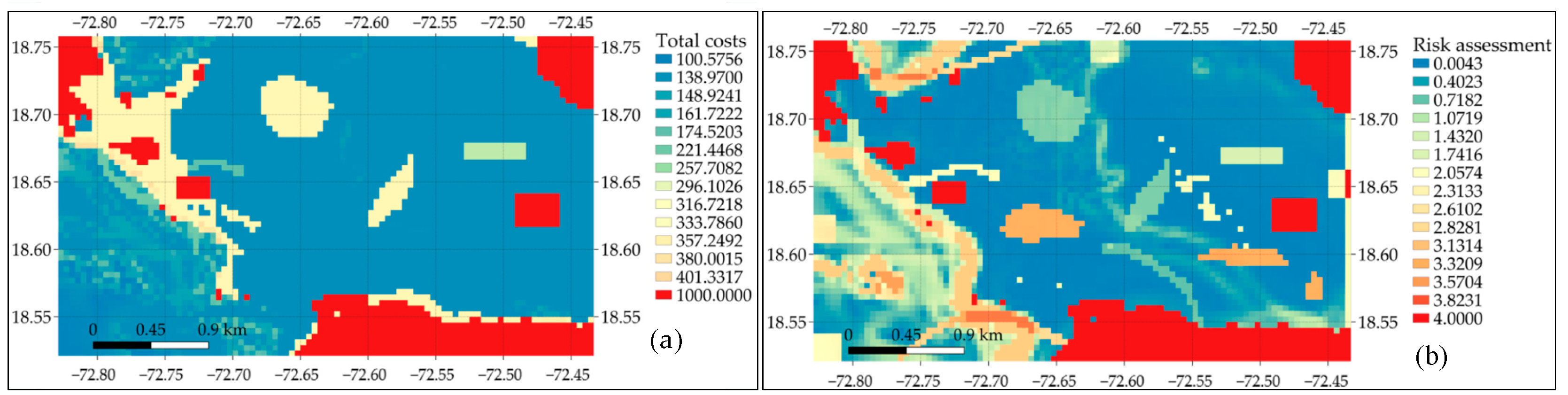
4.1. Quantification of Costs and Risks
4.2. Optimal Setting Parameters of the Ant Colony Algorithm
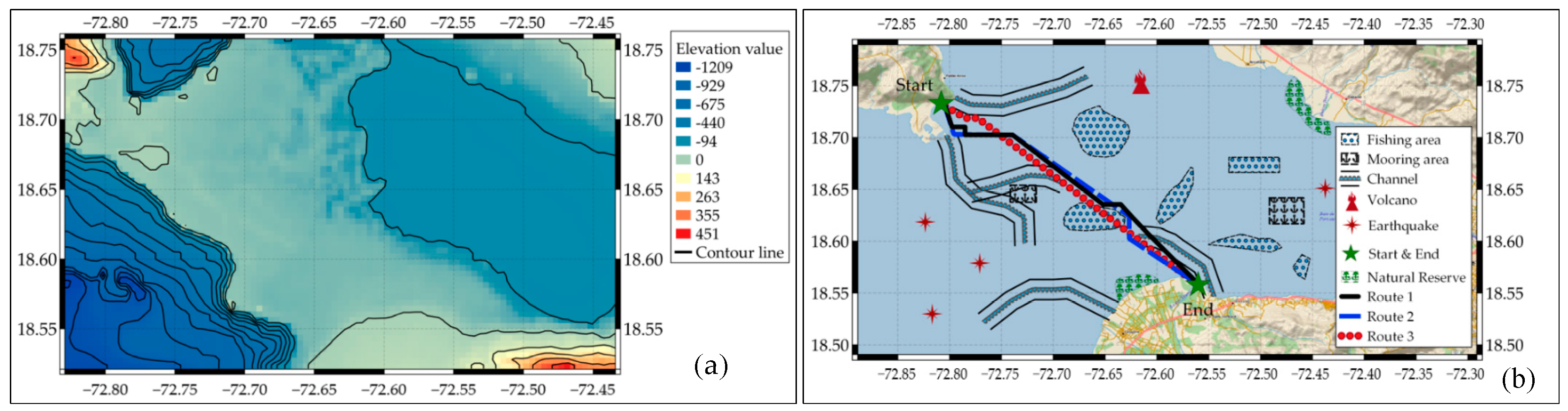
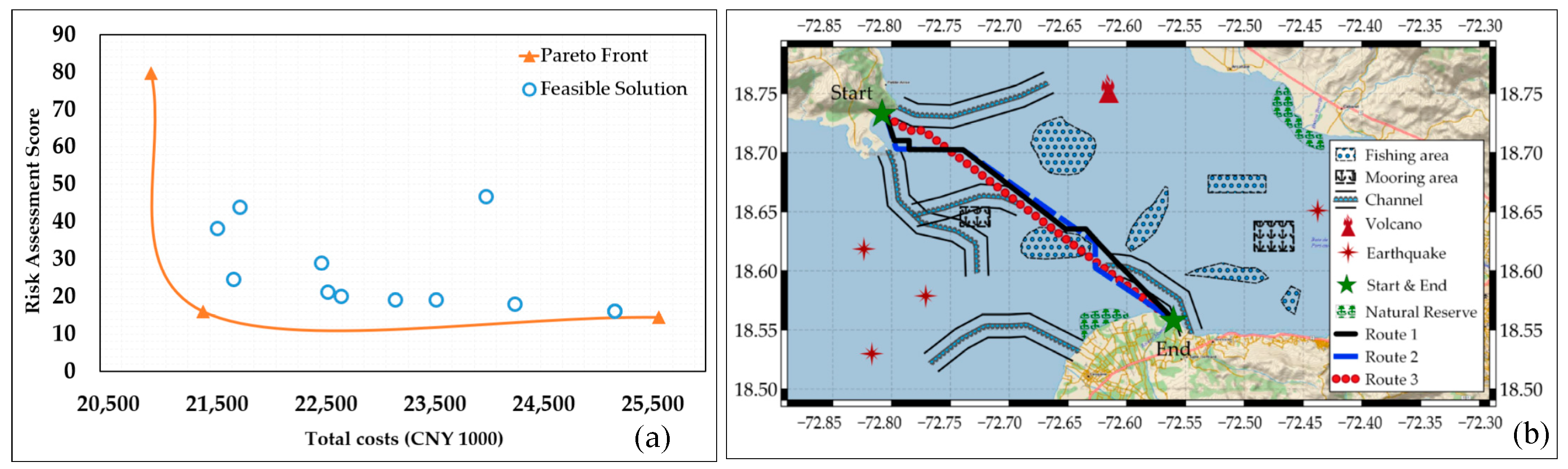
4.3. Multi-Objective Optimized Submarine Cable Path Planning
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Submarine Telecoms Industry Report; Submarine Telecoms Forum: Sterling, VA, USA, 2020; Available online: https://subtelforum.com/products/submarine-telecoms-industry-report/ (accessed on 10 March 2021).
- Submarine Telecoms Fourm. Subtel Cable Map. Available online: https://subtelforum.com/cablemap/ (accessed on 22 May 2023).
- Qiu, W. Submarine Cables Cut after Taiwan Earthquake in Dec 2006. Submarine Cable Netw. Available online: https://www.submarinenetworks.com/news/cables-cut-after-taiwanearthquake-2006 (accessed on 22 May 2023).
- Zhu, X.Y.; Hao, Q.L.; Zhang, J. Buried Depth of a Submarine Pipeline Based on Anchor Penetration. J. Mar. Sci. Eng. 2019, 7, 257. [Google Scholar] [CrossRef]
- TeleGeography. Submarine Cable Frequently Asked Questions. 2023. Available online: https://www2.telegeography.com/submarine-cable-faqs-frequently-asked-questions (accessed on 20 January 2023).
- Cao, C.; Wang, Z.F.; Zukerman, M.; Maton, J.H.; Bensoussan, A.; Wang, Y. Optimal Cable Laying Across an Earthquake Fault Line Considering Elliptical Failures. IEEE Trans. Reliab. 2016, 65, 1536–1550. [Google Scholar] [CrossRef]
- Zhao, M.B.; Chow, T.W.S.; Tang, P.; Wang, Z.F.; Guo, J.; Zukerman, M. Route Selection for Cabling Considering Cost Minimization and Earthquake Survivability Via a Semi-Supervised Probabilistic Model. IEEE Trans. Ind. Inform. 2016, 13, 502–511. [Google Scholar] [CrossRef]
- Wang, Z.F.; Wang, Q.; Zukerman, M.; Guo, J.; Wang, Y.; Wang, G.; Yang, J.; Moran, B. Multiobjective Path Optimization for Critical Infrastructure Links with Consideration to Seismic Resilience. Comput. Aided Civ. Infrastruct. Eng. 2017, 32, 836–855. [Google Scholar] [CrossRef]
- Wang, Z.F.; Wang, Q.; Moran, B.; Zukerman, M. Application of the Fast Marching Method for Path Planning of Long-haul Optical Fiber Cables With Shielding. IEEE Access 2018, 6, 41367–41378. [Google Scholar] [CrossRef]
- Wang, Z.F.; Wang, Q.; Moran, B.; Zukerman, M. Terrain constrained path planning for long-haul cables. Opt. Express 2019, 27, 8221–8235. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.Y.; Wang, Z.F.; Wang, T.J.; Zukerman, M. Designing Cost-Effective and Reliable Submarine Communications Cable Path: Lessons from the Tonga Volcano Disaster. IEEE Commun. Mag. 2023, 1, 179–185. [Google Scholar] [CrossRef]
- Askheim, D.O.; Fyrileiv, O. New Design Code for Interference between Trawl Gear and Pipelines: Dnv Rp-F111. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Hamburg, Germany, 4 June 2006. [Google Scholar]
- Chen, X.L.; Ye, Y.C.; Li, D. Analysis of the factors affecting submarine optical cable safety in the East China Sea. Ocean Eng. 2009, 27, 121–125. (In Chinese) [Google Scholar] [CrossRef]
- Allan, P.G. Selecting appropriate cable burial depths a methodology. In Proceedings of the IBC Conference on Submarine Communication, the Future of Network Infrastructure, Cannes, France, 1 November 1998. [Google Scholar]
- Wang, Y.S. Study on the Depth of Penetration of Anchors. Master’s Thesis, Dalian Maritime University, Dalian, China, 2014. [Google Scholar]
- Jeon, S.S.; O’Rourke, T.D. Northridge earthquake effects on pipelines and residential buildings. Bull. Seismol. Soc. Am. 2005, 95, 294–318. [Google Scholar] [CrossRef]
- Wells, D.L.; Coppersmith, K.J. New empirical relationships among magnitude, rupture length, rupture width, rupture area, and surface displacement. Bull. Seismol. Soc. Am. 1994, 84, 974–1002. [Google Scholar]
- Whelley, P.L.; Newhall, C.G.; Bradley, K.E. The frequency of explosive volcanic eruptions in Southeast Asia. Bull. Volcanol. 2015, 77, 1. [Google Scholar] [CrossRef] [PubMed]
- Dong, X.C.; Dong, X.H. Analysis of Effect of Marine Route Survey on submarine Fibre-optic Cable Engineering. Coast. Eng. 2007, 26, 11–14. (In Chinese) [Google Scholar]
- Berteaux, H.O.; Prindle, B.; May, D. The Deep Sea Moorings Fishbite Problem; OCEANS’87: Halifax, NS, Canada, 1987. [Google Scholar]
- Marra, L.J. Sharkbite on the SL submarine lightwave cable system: History, causes and resolution. IEEE J. Ocean. Eng. 1989, 14, 230–237. [Google Scholar] [CrossRef]
- Saaty, T.L. The Analytical Hierarchical Process: Planning, Priority Setting, Resource Allocation; McGraw-Hill: New York, NY, USA, 1980. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rank Level | Occurrence Possibility | Damage Levels |
|---|---|---|
| V | very high probability | major cable damage |
| IV | high probability | severe cable damage |
| III | medium probability | moderate cable damage |
| II | low probability | slight cable damage |
| I | very low probability | no cable damage |
| Rank Level | Occurrence Possibility (Number of Hits/km/Year) | (m), Cable Type |
|---|---|---|
| V | , SA | |
| IV | , SA | |
| III | , SA | |
| II | , SA | |
| I | , DA |
| Rank Level | Occurrence Possibility (100%) | (M), Cable Type |
|---|---|---|
| V | , SA | |
| IV | , SA | |
| III | , SA | |
| II | , SA | |
| I | , DA |
| Rank Level | Occurrence Possibility | (m), Cable Type |
|---|---|---|
| V | , SA | |
| IV | , SA | |
| III | , SA | |
| II | , SA | |
| I | , DA |
| Rank Level | Occurrence Possibility | (m), Cable Type |
|---|---|---|
| V | , SA | |
| IV | , SA | |
| III | , SA | |
| II | , SA | |
| I | , DA |
| Rank Level | (°) | (m), Cable Type |
|---|---|---|
| V | ||
| IV | ||
| III | ||
| II | ||
| I |
| Rank Level | Occurrence Possibility (%) | Cable Type |
|---|---|---|
| V | Light cable | |
| IV | SA | |
| III | Light protective cable | |
| II | DA | |
| I | Rock armored cable |
| Risk Types | Earthquake | Volcano | Marine Organism | Submarine Slope | Fishery Activities | Shipping Activities |
|---|---|---|---|---|---|---|
| Earthquake | 1 | 0.5 | 4 | 1 | 0.143 | 0.25 |
| Volcano | 2 | 1 | 3 | 2 | 0.125 | 0.2 |
| Marine organism | 0.25 | 0.333 | 1 | 0.25 | 0.111 | 0.167 |
| Submarine slope | 1 | 0.5 | 4 | 1 | 0.143 | 0.25 |
| Fishery activities | 7 | 8 | 9 | 7 | 1 | 6 |
| Shipping activities | 4 | 5 | 6 | 4 | 0.167 | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Z.; Wang, J.; Gao, G.; Wang, H.; Wang, D. Multi-Objective Optimization for Submarine Cable Route Planning Based on the Ant Colony Optimization Algorithm. Photonics 2023, 10, 896. https://doi.org/10.3390/photonics10080896
Zhao Z, Wang J, Gao G, Wang H, Wang D. Multi-Objective Optimization for Submarine Cable Route Planning Based on the Ant Colony Optimization Algorithm. Photonics. 2023; 10(8):896. https://doi.org/10.3390/photonics10080896
Chicago/Turabian StyleZhao, Zanshan, Jingting Wang, Guanjun Gao, Haoyu Wang, and Daobin Wang. 2023. "Multi-Objective Optimization for Submarine Cable Route Planning Based on the Ant Colony Optimization Algorithm" Photonics 10, no. 8: 896. https://doi.org/10.3390/photonics10080896
APA StyleZhao, Z., Wang, J., Gao, G., Wang, H., & Wang, D. (2023). Multi-Objective Optimization for Submarine Cable Route Planning Based on the Ant Colony Optimization Algorithm. Photonics, 10(8), 896. https://doi.org/10.3390/photonics10080896