Long-Wave Infrared Polarization-Based Airborne Marine Oil Spill Detection and Identification Technology


 and
and
Abstract
1. Introduction
2. Basic Theory
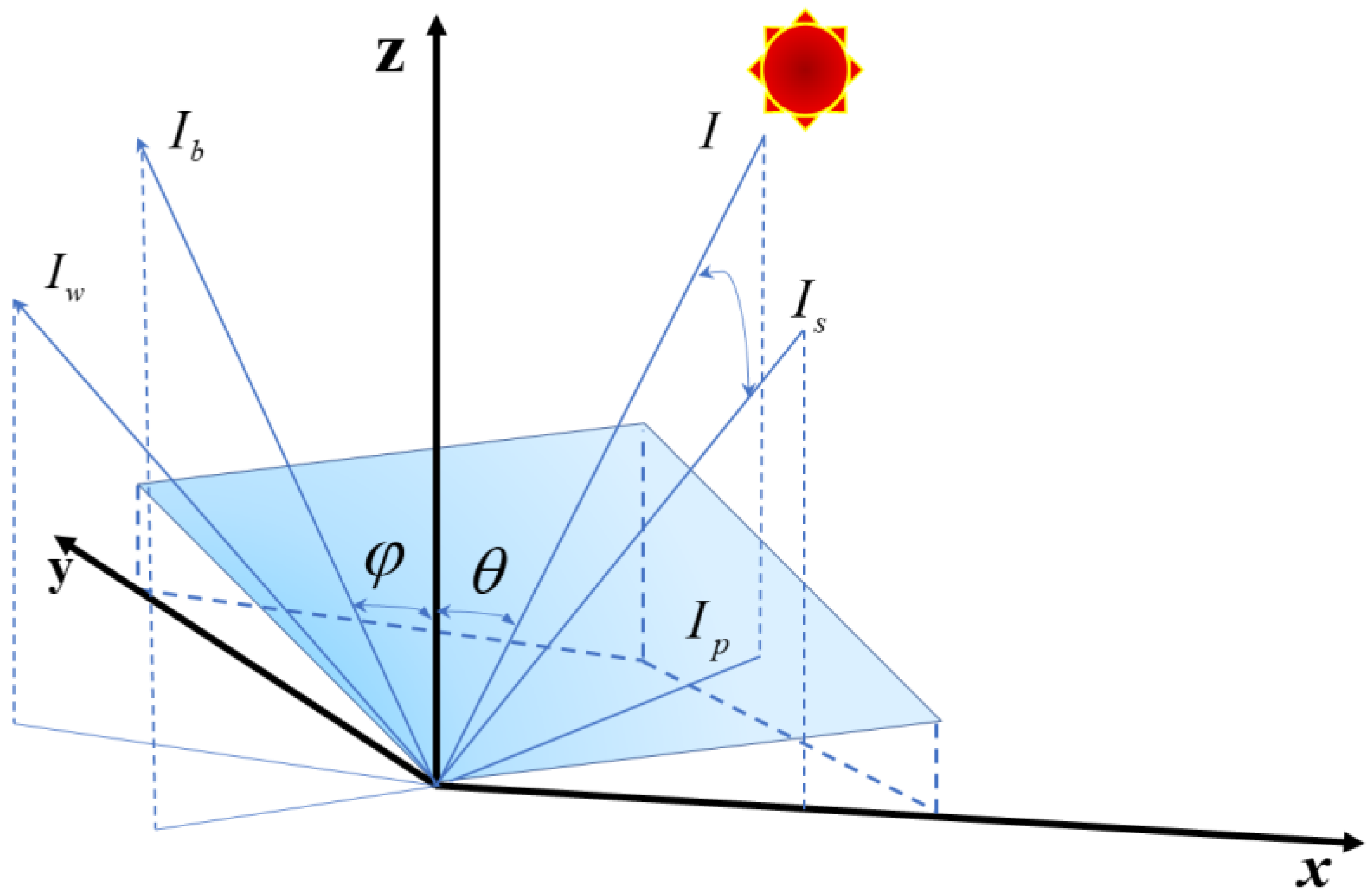
2.1. Modeling the Infrared Polarization Characteristics of Oil Spills
2.2. Study on Infrared Polarization Maintenance of Oil Spills
2.2.1. Infrared Polarization Error Analysis of Oil Spills
- 1.
- The polarization characteristics of the optical system produce errors.
- 2.
- MPA manufacturing error.
- 3.
- Calibration error.
2.2.2. Systematic Bias-Preserving Methods
3. Experimental Design
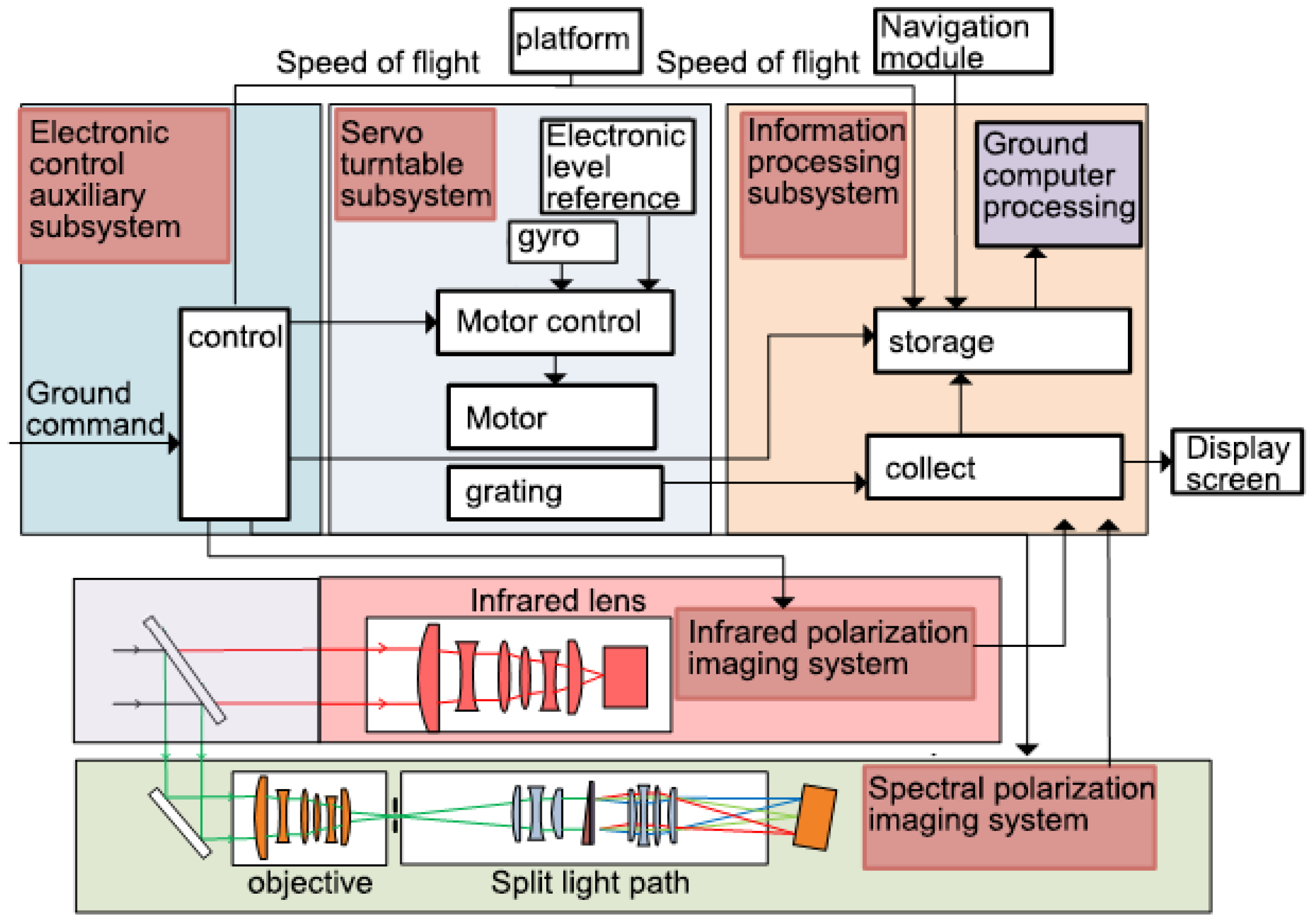
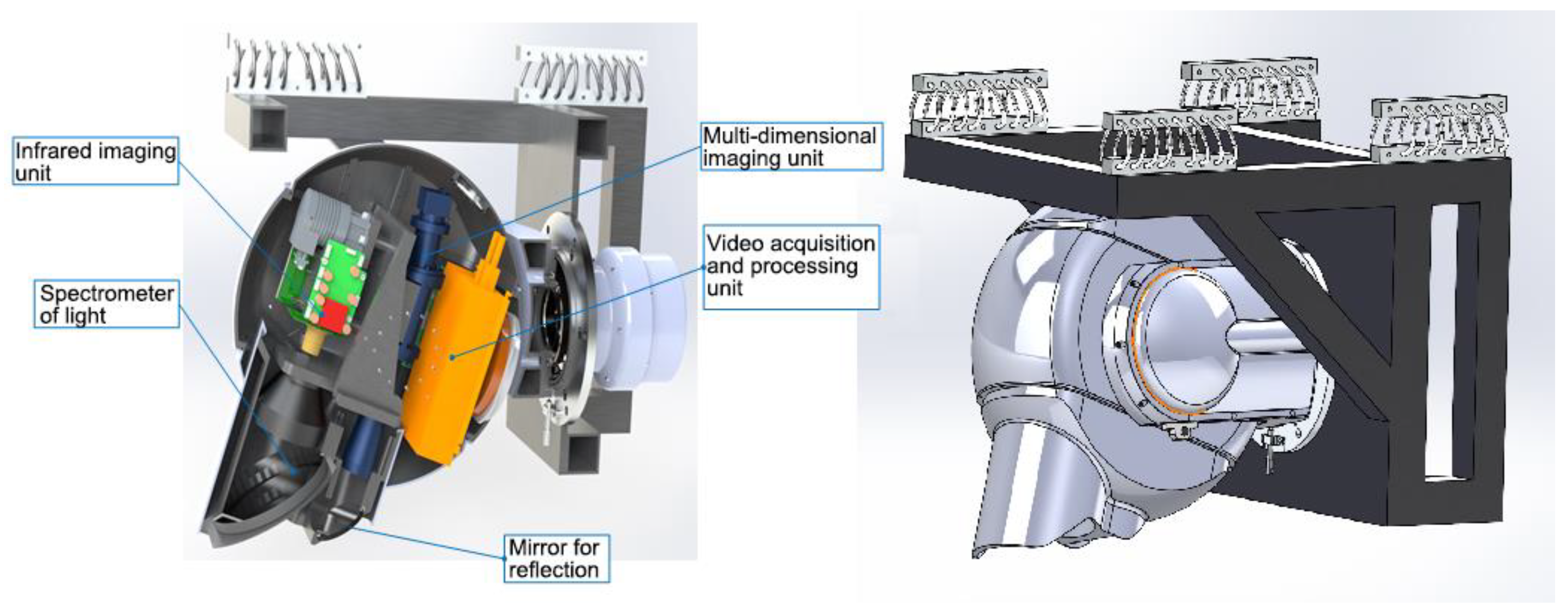
3.1. System Architecture of the Experimental Setup
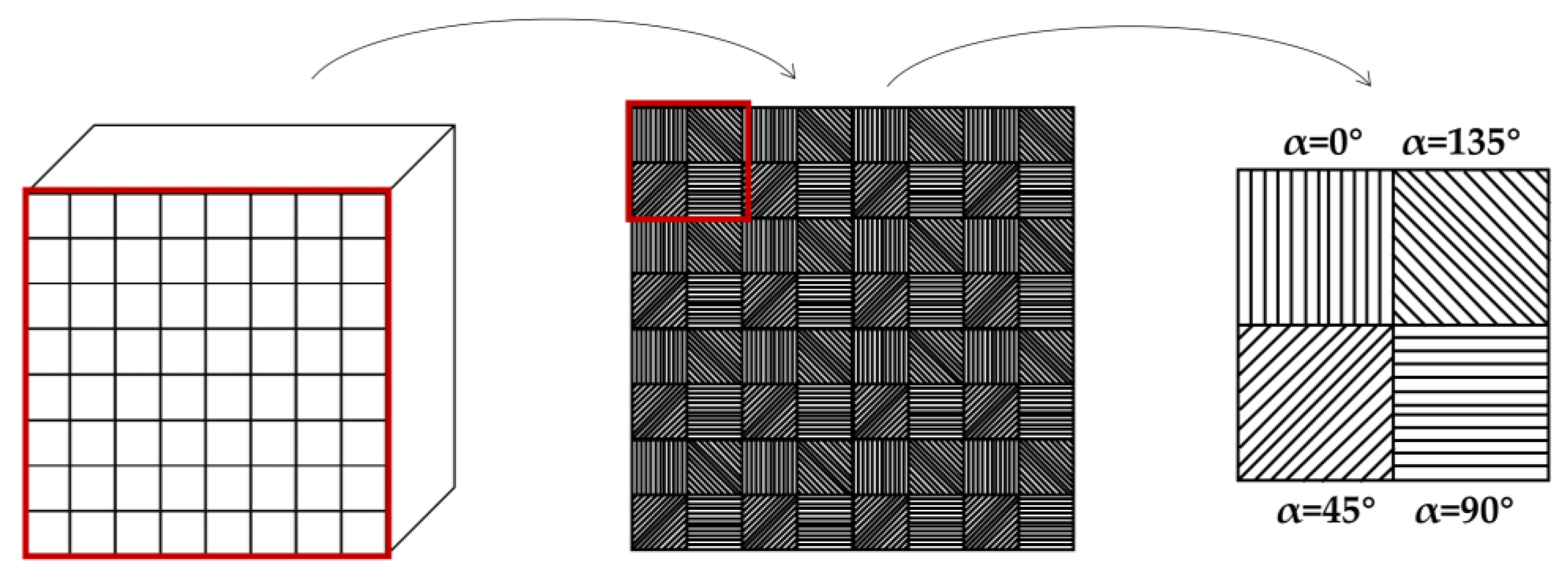
3.2. Infrared Polarization Information Acquisition Solution
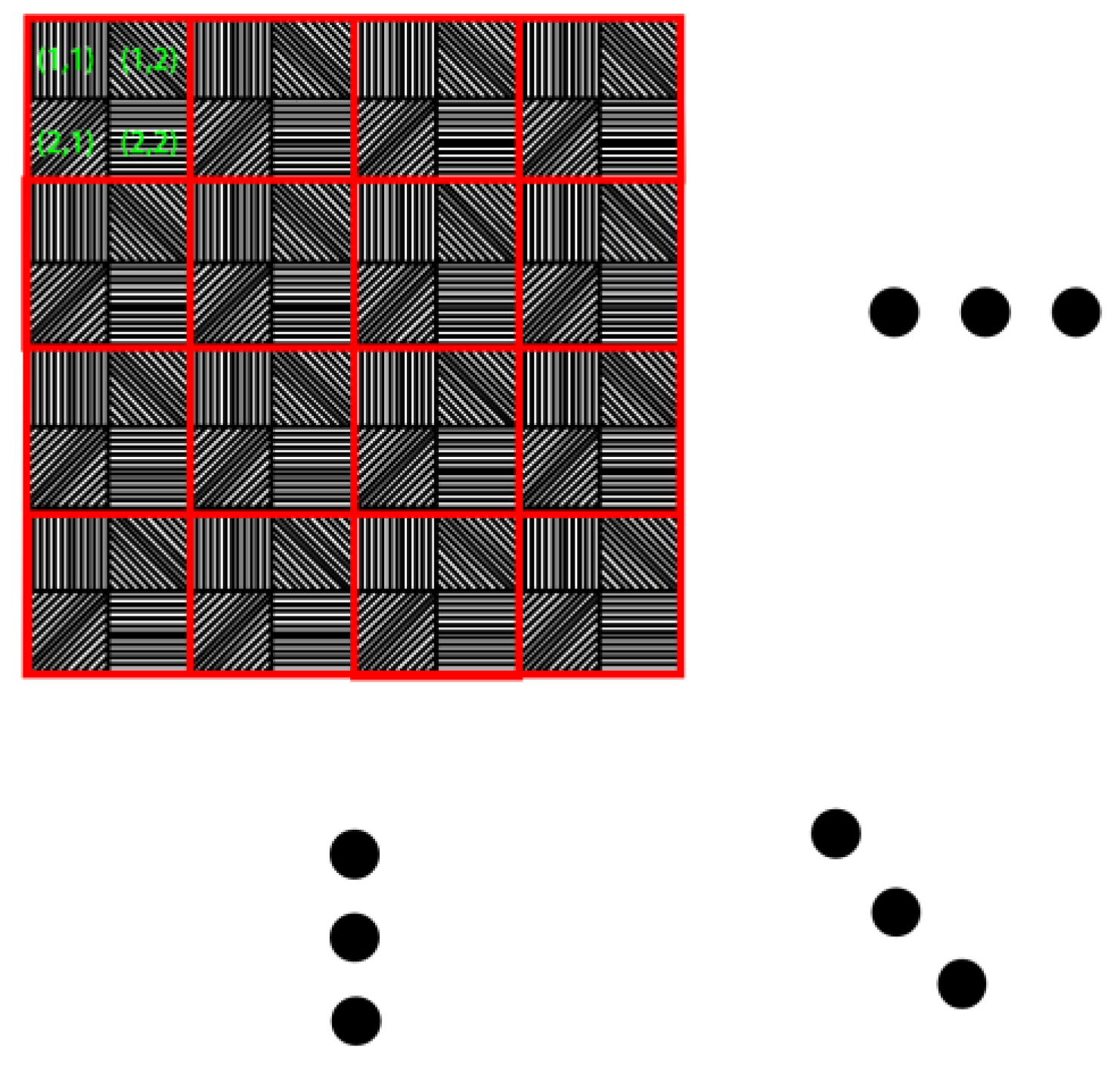
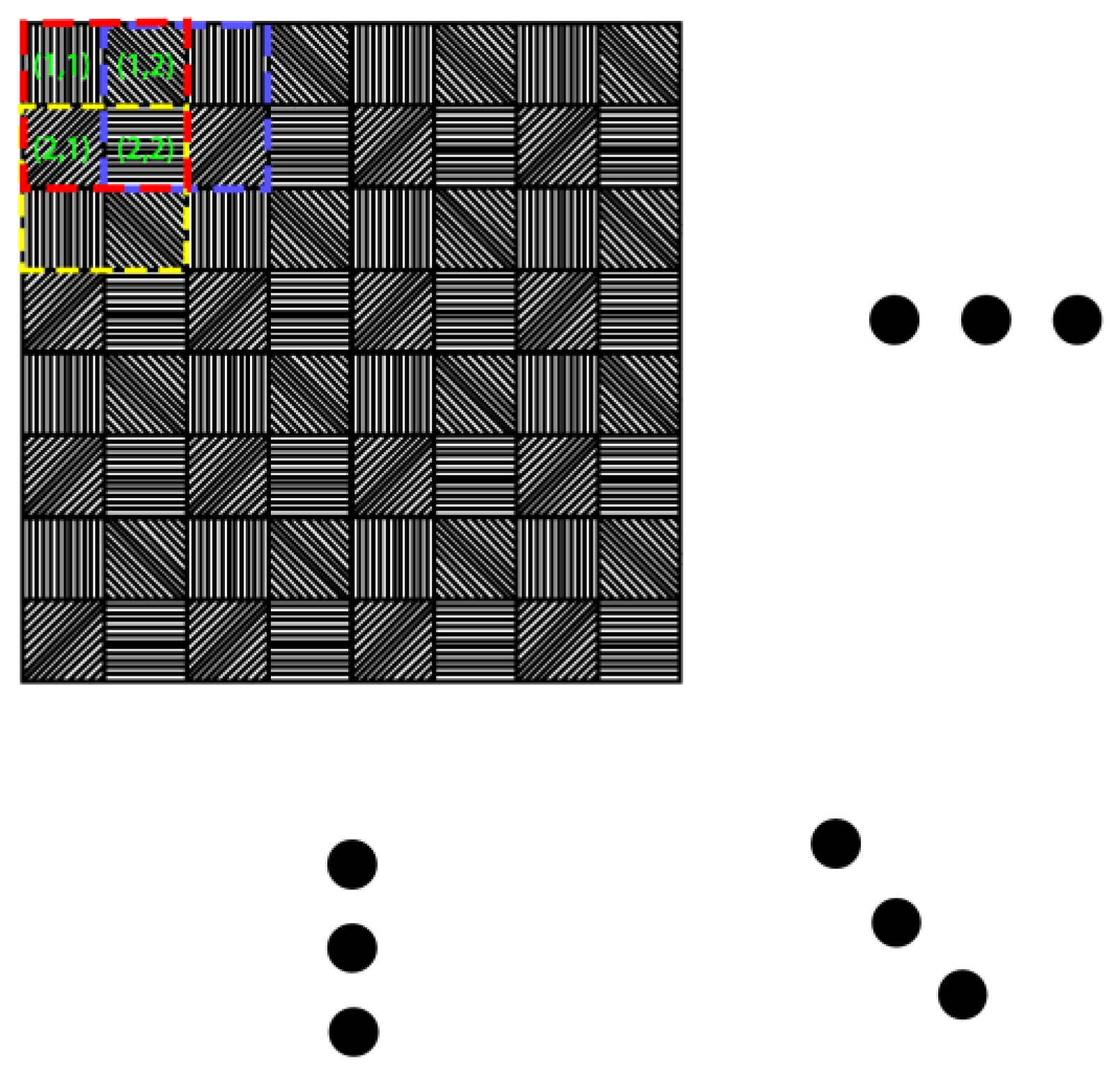
3.3. Design of the Polarization Information Processing Module
- (1)
- The row and column direction translation step size is (2 a):
- (2)
- The translation steps in the row, and column directions are (a):
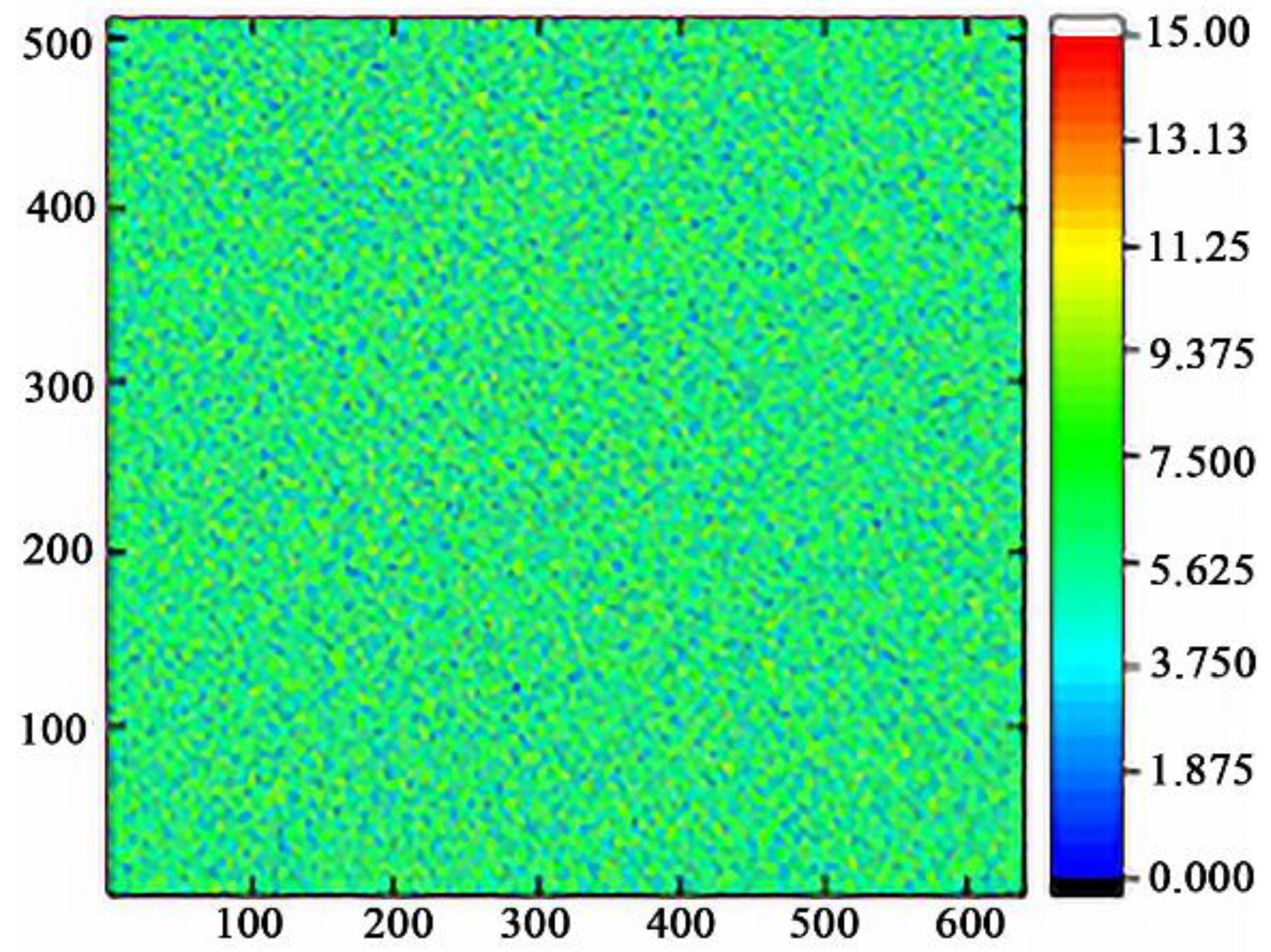
4. Bias-Preserving Experimental Validation and Data Analysis
4.1. Experimental Scheme of Infrared Polarization Protection
4.2. Experimental Results and Analysis
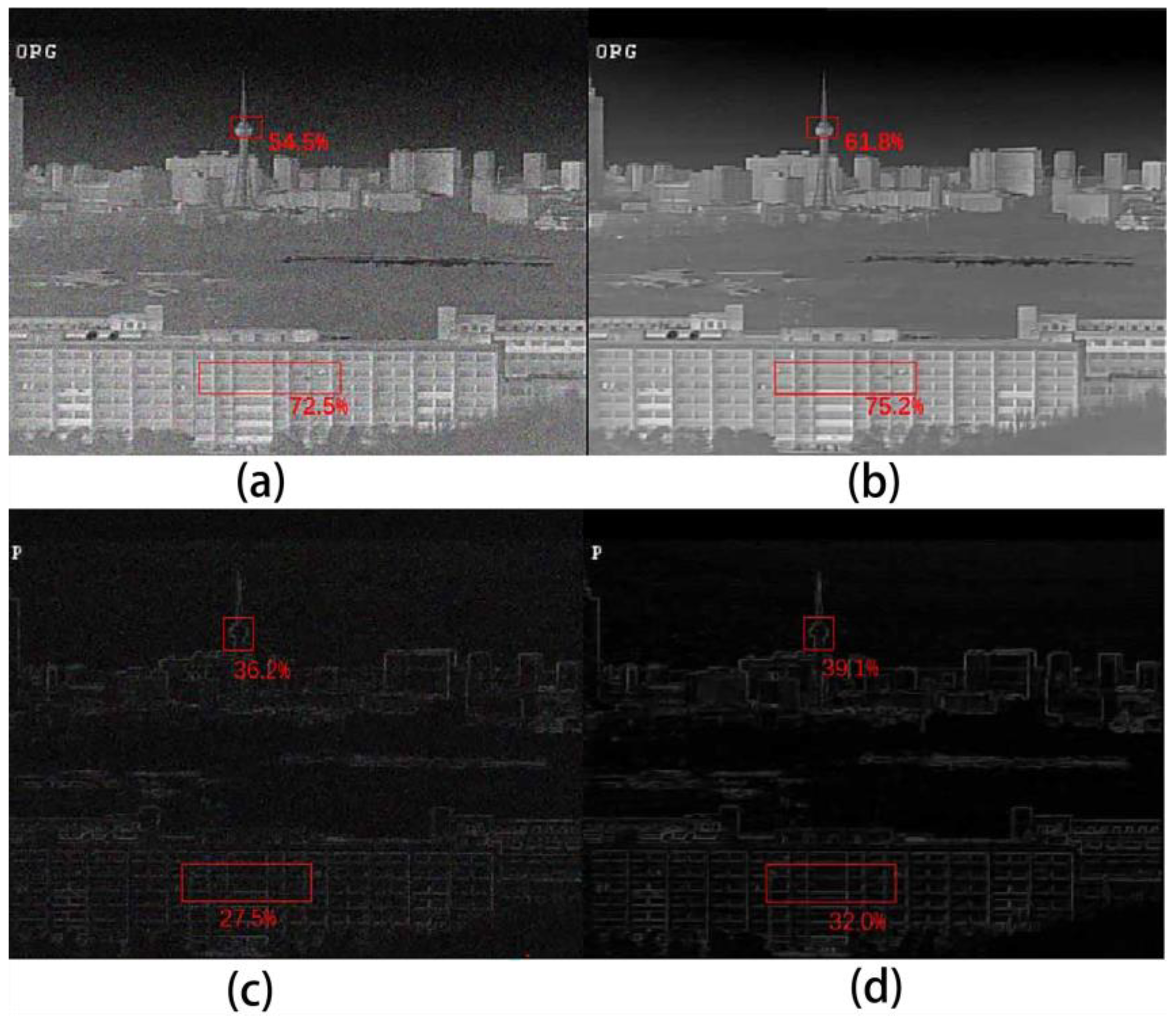
5. Infrared Oil Species Differentiation Experiment
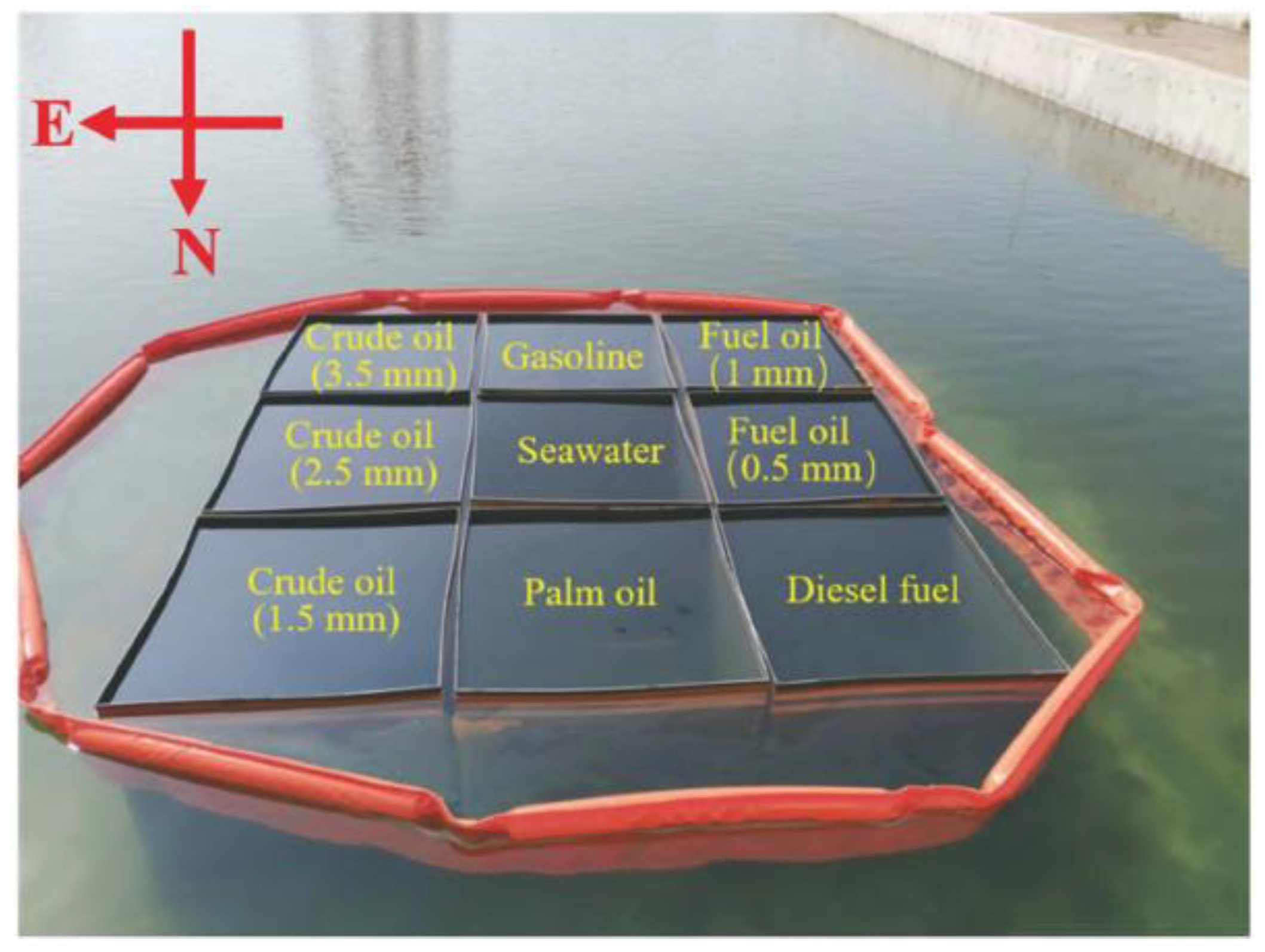
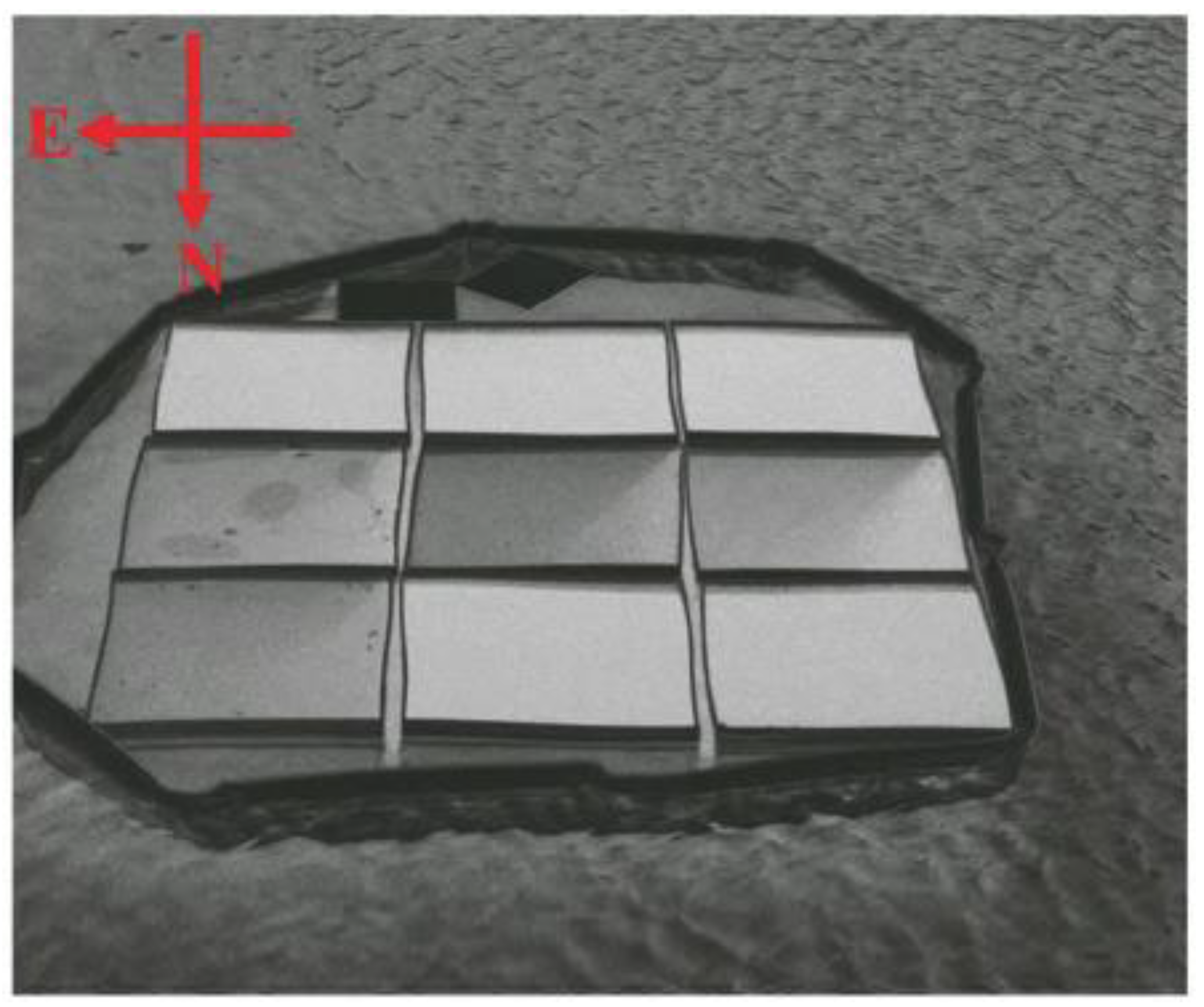
5.1. Oilfield Differentiation Experiment Scheme
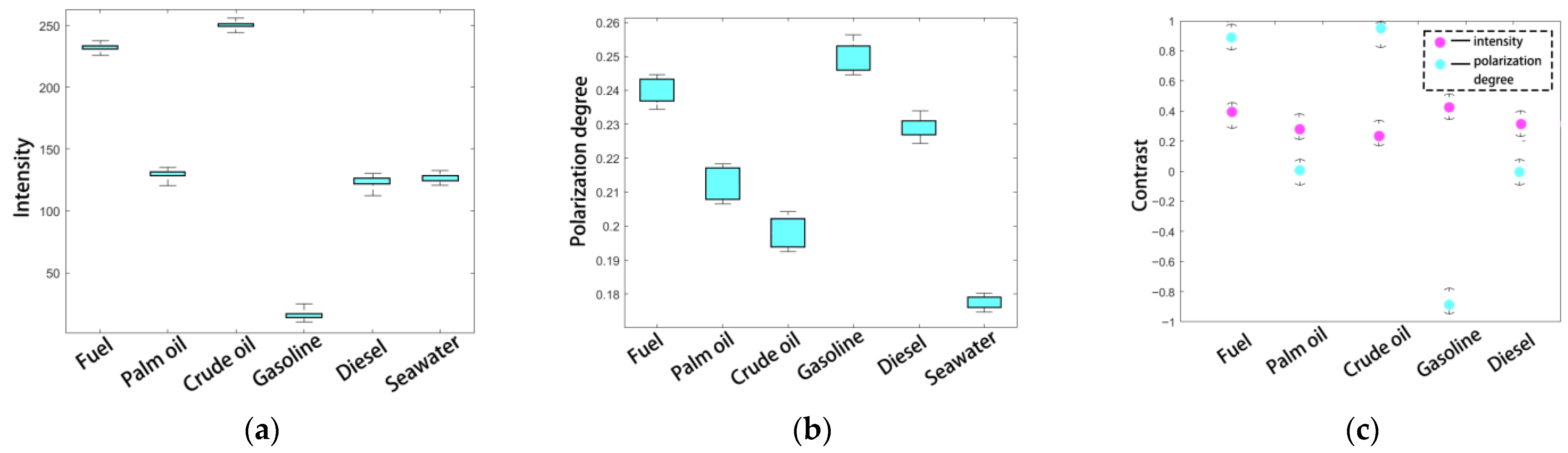
5.2. Experimental Results and Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, P.; Cai, Q.; Lin, W.; Chen, B.; Zhang, B. Offshore oil spill response practices and emerging challenges. Mar. Pollut. Bull. 2016, 110, 6–27. [Google Scholar] [CrossRef] [PubMed]
- Lacava, T.; Ciancia, E.; Coviello, I.; Di Polito, C.; Grimaldi, C.S.L.; Pergola, N.; Satriano, V.; Temimi, M.; Zhao, J.; Tramutoli, V. A MODIS-based robust satellite technique (RST) for timely detection of oil spilled areas. Remote Sens. 2017, 9, 128. [Google Scholar] [CrossRef]
- Lei, F.; Wang, W.; Zhang, W.; Li, K.; Xu, Z. Oil spills tracking through texture analysis from modis imagery. In Proceedings of the IGARSS 2019–2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019. [Google Scholar]
- Garcia-Pineda, O.; Staples, G.; Jones, C.E.; Hu, C.; Holt, B.; Kourafalou, V.; Graettinger, G.; DiPinto, L.; Ramirez, E.; Streett, D.; et al. Classification of oil spill by thicknesses using multiple remote sensors. Remote Sens. Environ. 2019, 236, 111421. [Google Scholar] [CrossRef]
- Shi, H.; Liu, Y.; He, C.; Wang, C.; Li, Y.; Zhang, Y. Analysis of infrared polarization properties of targets with rough surfaces. Opt. Laser Technol. 2022, 151, 108069. [Google Scholar] [CrossRef]
- Sun, Z.Q.; Zhao, Y.S.; Yan, G.Q.; Li, S. Study on the hyperspectral polarized reflection characteristics of oil slicks on sea surfaces. Chin. Sci. Bull. 2011, 56, 1596–1602. [Google Scholar] [CrossRef]
- Martin, J.R. RISTA a real time high resolution wide area infrared (IR) tactical reconnaissance system. In Proceedings of the IEEE Aerospace Conference, Snowmass, CO, USA, 13 February 1997. [Google Scholar]
- Mera, D.; Cotos, J.M.; Varela-Pet, J.G.; Rodríguez, P.; Caro, A. Automatic decision support system based on SAR data for oil spill detection. Comput. Geosci. 2014, 72, 184–191. [Google Scholar] [CrossRef]
- Yi, L.; Haodong, S.; Huilin, J. Infrared polarization properties of targets with rough surface. Chin. Opt. 2020, 13, 459–471. [Google Scholar]
- Pezzaniti, J.L.; Chenault, D.B. A division of aperture MWIR imaging polarimeter. In Proceedings of the Polarization Science and Remote Sensing II, San Diego, CA, USA, 31 July–4 August 2005; SPIE—The International Society for Optical Engineering: Bellingham, WA, USA, 2005; Volume 44, pp. 515–533. [Google Scholar]
- Yin, D.; Huang, X.; Qian, W.; Huang, X.; Li, Y.; Feng, Q. Airborne validation of a new-style ultraviolet push-broom camera for ocean oil spill pollution surveillance. In Proceedings of the Remote Sensing of the Ocean, Sea Ice, and Large Water Regions, Toulouse, France, 22–23 September 2010; Bostater, C.R., Jr., Mertikas, S.P., Neyt, X., Velez-Reyes, M., Eds.; SPIE: Bellingham, WA, USA, 2010; Volume 7825, p. 78250. [Google Scholar]
- Wang, S.; Fu, X.; Zhao, Y.; Wang, H. Modification of CFAR Algorithm for Oil Spill Detection from SAR Data. Intell. Autom. Soft Comput. 2015, 21, 163–174. [Google Scholar] [CrossRef]
- Moctezuma, M.; Parmiggiani, F. Adaptive stochastic minimization for measuring marine oil spill extent in synthetic aperture radar images. J. Appl. Remote Sens. 2014, 8, 083553. [Google Scholar] [CrossRef]
- Shi, H.; Wang, J.; Li, Y.; Fu, Q.; Ma, Y.; Zhu, J.; Li, S.; Ma, Y.; Jiang, H. Multi-Dimensional Optical Monitoring Method of Marine Ecological Environment Under Complex Sea Conditions. Acta Opt. Sin. 2022, 42, 0600004. [Google Scholar]
- Guo, G.; Liu, B.; Liu, C. Thermal infrared spectral characteristics of bunker fuel oil to determine oil-film thickness and API. J. Mar. Sci. Eng. 2020, 8, 135. [Google Scholar] [CrossRef]
- De Carolis, G.; Adamo, M.; Pasquariello, G. Thickness estimation of marine oil slicks with near-infrared MERIS and MODIS imagery: The Lebanon oil spill case study. In Proceedings of the International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 3002–3005. [Google Scholar]
- Zhang, S.; Fu, Q.; Zhan, J.; Duan, J.; Li, Y.; Jiang, H. The influence of humidity on the transmission characteristics of polarized light in the infrared band. Acta Photonica Sin. 2017, 46, 39–45. [Google Scholar]
- Li, Y.; Liu, J.; Shi, H. Research on Identification of Marine Oil Spill Based on Polarization Characteristics. Acta Photonica Sin. 2021, 50, 0712001. [Google Scholar] [CrossRef]
- Zhang, Y.; Lin, H.; Liu, Q.; Hu, J.; Li, X.; Yeung, K. Oil-Spill Monitoring in the coastal waters of Hong Kong and vicinity. Mar. Geod. 2012, 35, 93–106. [Google Scholar] [CrossRef]
- Fu, Q.; Si, L.; Liu, J.; Shi, H.; Li, Y. Design and experimental study of a polarization imaging optical system for oil spills on sea surfaces. Appl. Opt. 2022, 61, 6330–6338. [Google Scholar] [CrossRef]
- Konik, M.; Bradtke, K. Object-oriented approach to oil spill dete2ction using ENVISAT ASAR images. ISPRS J. Photogramm. Remote Sens. 2016, 118, 37–52. [Google Scholar] [CrossRef]
- Akar, S.; Süzen, M.L.; Kaymakci, N. Detection and object-based classification of offshore oil slicks using ENVISAT-ASAR images. Environ. Monit. Assess. 2011, 183, 409–423. [Google Scholar] [CrossRef]
- Fu, Q.; Luo, K.; Song, Y.; Zhang, M.; Zhang, S.; Zhan, J.; Duan, J.; Li, Y. Study of Sea Fog Environment Polarization Transmission Characteristics. Appl. Sci. 2022, 12, 8892. [Google Scholar] [CrossRef]
- Mihoub, Z.; Hassini, A. Monitoring and identification of marine oil spills using advanced synthetic aperture radar images. Opt. Appl. 2014, 44, 433–449. [Google Scholar]
- Senthil Murugan, J.; Parthasarathy, V. AETC: Segmentation and classification of the oil spills from SAR imagery. Environ. Forensics 2017, 18, 258–271. [Google Scholar] [CrossRef]
- Su, T.F.; Li, H.Y.; Liu, T.X. Sea oil spill detection method using SAR imagery combined with object-Based image analysis and fuzzy logic. Adv. Mater. Res. 2014, 1065–1069, 3192–3200. [Google Scholar] [CrossRef]
- Mera, D.; Fernández-Delgado, M.; Cotos, J.M.; Viqueira, J.R.R.; Barro, S. Comparison of a massive and diverse collection of ensembles and other classifiers for oil spill detection in SAR satellite images. Neural Comput. Appl. 2017, 28, 1101–1117. [Google Scholar] [CrossRef]
- Fu, Q.; Yang, W.; Shi, H.; Li, Y.; Zhang, S.; Zhan, J.; Liu, J.; Wang, C.; Liu, Z.; Zhu, Y.; et al. Design and Experiment of High-Resolution Multispectral Polarization Imaging System. Appl. Sci. 2022, 12, 10712. [Google Scholar] [CrossRef]
- Yu, F.; Sun, W.; Li, J.; Zhao, Y.; Zhang, Y.; Chen, G. An improved Otsu method for oil spill detection from SAR images. Oceanologia 2017, 59, 311–317. [Google Scholar] [CrossRef]
- Hang, L.M.; Van Truong, V. A combined method of differential evolution algorithm and neural network for automatic identification oil spill at Vietnam East Sea. J. Geol. Resour. Eng. 2015, 4, 184–193. [Google Scholar]
- Holstein, A.; Kappas, M.; Propastin, P.; Renchin, T. Oil spill detection in the Kazakhstan sector of the Caspian sea with the help of ENVISAT ASAR data. Environ. Earth Sci. 2018, 77, 198. [Google Scholar] [CrossRef]
- Cheng, Y.; Li, X.; Xu, Q.; Garcia-Pineda, O.; Andersen, O.B.; Pichel, W.G. SAR observation and model tracking of an oil spill event in coastal waters. Mar. Pollut. Bull. 2011, 62, 350–363. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Meaning |
|---|---|
| p component light intensity | |
| s component light intensity | |
| The P component of the object’s own radiation | |
| The s component of the object’s own radiation | |
| The reflectance of the p component | |
| The reflectance of the s component | |
| Background radiation intensity | |
| Radiation angle | |
| Wavelength | |
| Temperature | |
| Angle of incidence | |
| The refractive index of the medium of p component | |
| The refractive index of the medium of s component |
| Parameter | Index |
|---|---|
| Material | Vanadium oxide |
| Specification | 640 × 512 |
| Pixel size | 17 μm |
| Spectral response range | 8–12 μm |
| Operating temperature | −40 °C~60 °C |
| NETD | 80 mK |
| Number | Samples | Density (g/mL) | Color |
|---|---|---|---|
| 1 | Fuel | 0.821 | Dark blue |
| 2 | Palm oil | 0.836 | Brownish yellow |
| 3 | Crude oil | 0.882 | Black |
| 4 | Seawater | 1.025 | Colorless |
| 5 | Gasoline | 0.737 | Light yellow |
| 6 | Diesel | 0.835 | Light cyan |
| Samples | Infrared Intensity | Infrared Polarization |
|---|---|---|
| Fuel | [231.57, 232.81] | [0.237, 0.243] |
| Palm oil | [128.92, 130.68] | [0.208, 0.217] |
| Crude oil | [249.50, 250.50] | [0.194, 0.202] |
| Gasoline | [14.09, 15.81] | [0.246, 0.253] |
| Diesel | [123.01, 126.29] | [0.227, 0.231] |
| Seawater | [124.82, 128.00] | [0.176, 0.179] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, H.; Ma, L.; Fu, Q.; Li, Y.; Shi, H.; Liu, Z.; Liu, J.; Wang, J.; Jiang, H. Long-Wave Infrared Polarization-Based Airborne Marine Oil Spill Detection and Identification Technology. Photonics 2023, 10, 588. https://doi.org/10.3390/photonics10050588
Sun H, Ma L, Fu Q, Li Y, Shi H, Liu Z, Liu J, Wang J, Jiang H. Long-Wave Infrared Polarization-Based Airborne Marine Oil Spill Detection and Identification Technology. Photonics. 2023; 10(5):588. https://doi.org/10.3390/photonics10050588
Chicago/Turabian StyleSun, Hongyu, Lianji Ma, Qiang Fu, Yingchao Li, Haodong Shi, Zhuang Liu, Jianan Liu, Jiayu Wang, and Huilin Jiang. 2023. "Long-Wave Infrared Polarization-Based Airborne Marine Oil Spill Detection and Identification Technology" Photonics 10, no. 5: 588. https://doi.org/10.3390/photonics10050588
APA StyleSun, H., Ma, L., Fu, Q., Li, Y., Shi, H., Liu, Z., Liu, J., Wang, J., & Jiang, H. (2023). Long-Wave Infrared Polarization-Based Airborne Marine Oil Spill Detection and Identification Technology. Photonics, 10(5), 588. https://doi.org/10.3390/photonics10050588