The Block Landweber Iterative Method for Light Field Reconstruction from a Focal Stack

Abstract
:1. Introduction
2. Light Field Reconstruction Based on the Focal Stack
2.1. Continuous Focal Stack Transform
2.2. Discrete Focal Stack Transform
3. Iterative Scheme
3.1. Method
3.2. The Block Landweber Iterative Method
3.3. Convergence Results
3.4. The Relaxation Strategy
4. Experimental Results
- The 4D Light Field Benchmark dataset (‘Boxes’ and ‘Rosemary’ [25]) was generated by a computer (CVIA Konstanz & HCI Heidelberg) and has an angular resolution of and a spatial resolution of .
- The INRIA Light field dataset contains light fields captured using a second-generation Lytro Illum camera (‘Lytro1GCamera’ and ‘Toys’ [26]), which has an angular resolution of and a spatial resolution of .
- A first-generation Lytro camera was used to capture the ‘Fruits’ dataset [11].
- The real data were recorded using a Basler camera (Model: acA411220uc) with a Myutron prime lens (Model: HF5018V), an F-number of , and a focal length of mm.
4.1. Simulation Data
4.1.1. Comparing Different Relaxation Coefficient Formulas
4.1.2. Focal Stack Number
4.1.3. Angular Resolution
4.2. INRIA Dataset
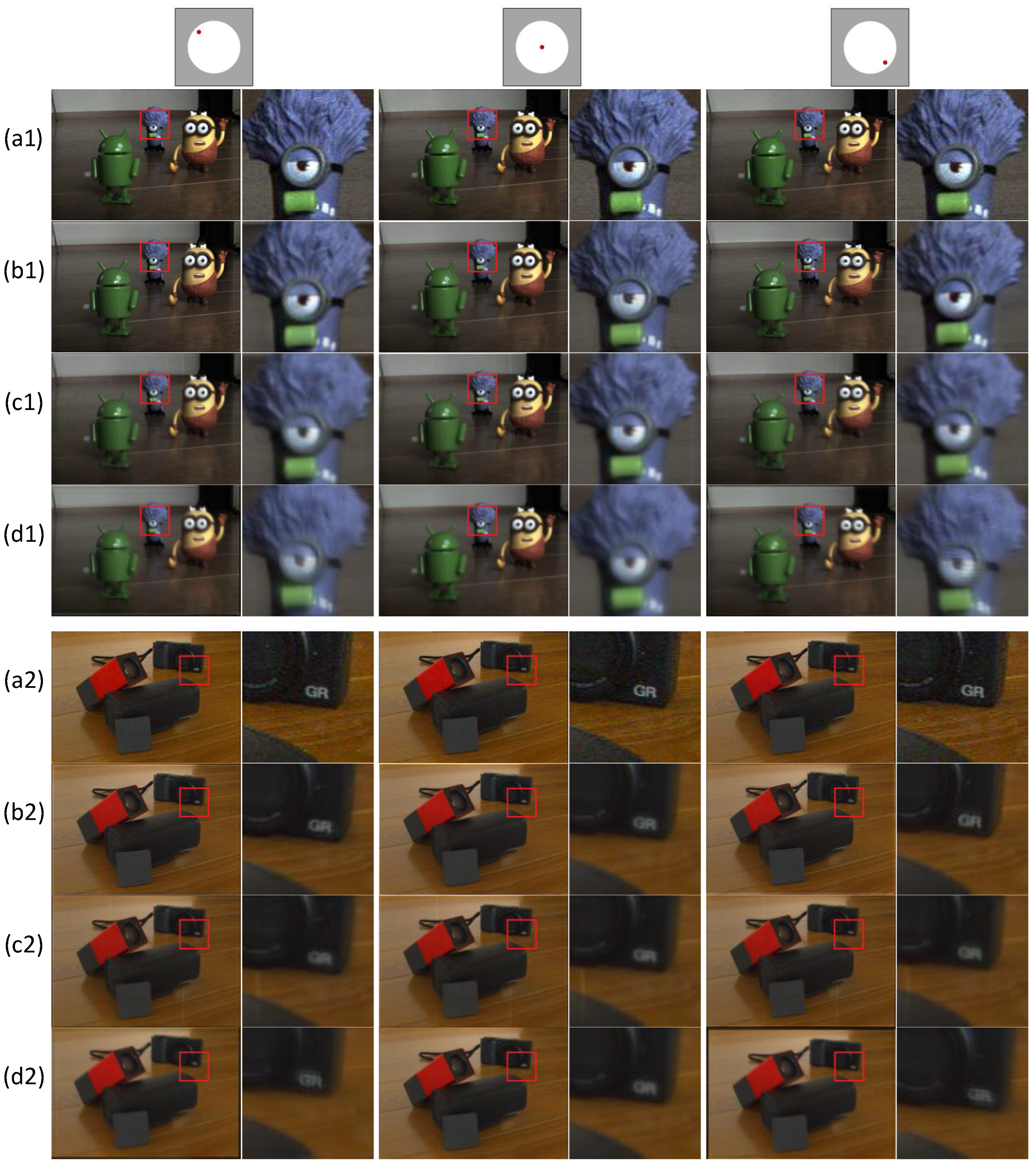
4.3. Real Focal Stack Data
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Levoy, M.; Hanrahan, P. Light field rendering Aug. In Proceedings of the Siggraph96 Conference, New Orleans, LA, USA, 4–9 August 1996; pp. 31–42. [Google Scholar]
- Gortler, S.J.; Grzeszczuk, R.; Szeliski, R.; Cohen, M.F. The Lumigraph. Proc. Siggraph. 1996, 96, 43–54. [Google Scholar]
- Ng, R. Digital Light Field Photography. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 2006. [Google Scholar]
- Wilburn, B.; Joshi, N.; Vaish, V.; Talvala, E.V.; Antunez, E.; Barth, A.; Adams, A.; Horowitz, M.; Levoy, M. High performance imaging using large camera arrays. ACM Trans. Graph. 2005, 24, 765–776. [Google Scholar] [CrossRef]
- Veeraraghavan, A.; Raskar, R.; Agrawal, A.K.; Mohan, A.; Tumblin, J. Dappled photography: Mask enhanced cameras for heterodyned light fields and coded aperture refocusing. ACM Trans. Graph. 2007, 26, 69. [Google Scholar] [CrossRef]
- Levin, A. Image and Depth from a Conventional Camera with a Coded Aperture. In Proceedings of the SIGGRAPH2007, San Diego, CA, USA, 5–8 August 2007. [Google Scholar]
- Fuchs, M.; Kächele, M.; Rusinkiewicz, S. Design and Fabrication of Faceted Mirror Arrays for Light Field Capture. Comput. Graph. Forum 2013, 32, 246–257. [Google Scholar] [CrossRef]
- Manakov, A.; Restrepo, J.F.; Klehm, O.; Hegedüs, R.; Eisemann, E.; Seidel, H.P.; Ihrke, I. A Reconfigurable Camera Add-On for High Dynamic Range, Multispectral, Polarization, and Light-Field Imaging. ACM Trans. Graph. 2013, 32, 47. [Google Scholar] [CrossRef]
- Alonso, J.R.; Fernández, A.; Ferrari, J.A. Reconstruction of perspective shifts and refocusing of a three-dimensional scene from a multi-focus image stack. Appl. Opt. 2016, 55, 2380. [Google Scholar] [CrossRef]
- Lin, X.; Suo, J.; Wetzstein, G.; Dai, Q.; Raskar, R. Coded focal stack photography. In Proceedings of the IEEE International Conference on Computational Photography (ICCP), Cambridge, MA, USA, 19–21 April 2013; pp. 1–9. [Google Scholar] [CrossRef]
- Mousnier, A.; Vural, E.; Guillemot, C. Partial light field tomographic reconstruction from a fixed-camera focal stack. arXiv 2015. Available online: http://www.irisa.fr/temics/demos/lightField/index.html (accessed on 17 March 2022). [CrossRef]
- Takahashi, K.; Kobayashi, Y.; Fujii, T. From Focal Stack to Tensor Light-Field Display. IEEE Trans. Image Process. 2018, 27, 4571–4584. [Google Scholar] [CrossRef]
- Levin, A.; Durand, F. Linear view synthesis using a dimensionality gap light field prior. In Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 1831–1838. [Google Scholar] [CrossRef]
- Yin, X.; Wang, G.; Li, W.; Liao, Q. Iteratively reconstructing 4D light fields from focal stacks. Appl. Opt. 2016, 55, 8457–8463. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, R.; Feng, S.; Zuo, C.; Chen, Q.; Cai, Z. Consistency analysis of focal stack-based light field reconstruction. Opt. Lasers Eng. 2023, 165, 107539. [Google Scholar] [CrossRef]
- Jiang, M.; Wang, G. Convergence Studies on Iterative Algorithms for Image Reconstruction. IEEE Trans. Med. Imaging 2003, 22, 569–579. [Google Scholar] [CrossRef]
- Liu, Y.; Qu, G. Relaxation strategy for the block Landweber method. Phys. Scr. 2023, 98, 115217. [Google Scholar] [CrossRef]
- Censor, Y.; Elfving, T. Block-Iterative Algorithms with Diagonally Scaled Oblique Projections for the Linear Feasibility Problem. SIAM J. Matrix Anal. Appl. 2002, 24, 40–58. [Google Scholar] [CrossRef]
- Han, G.; Qu, G.; Jiang, M. Relaxation strategy for the Landweber method. Signal Process. 2016, 125, 87–96. [Google Scholar] [CrossRef]
- Gao, S.; Qu, G. Filter-Based Landweber Iterative Method for Reconstructing the Light Field. IEEE Access 2020, 8, 138340–138349. [Google Scholar] [CrossRef]
- Landweber, L. An iteration formula for fredholm integral equations of the first kind. Am. J. Math. 1951, 73, 615–624. [Google Scholar] [CrossRef]
- Kirsch, A. An Introduction to the Mathematical Theory of Inverse Problems; Applied Mathematical Sciences; Springer: New York, NY, USA, 1996. [Google Scholar]
- Han, G.; Qu, G.; Wang, Q. Weighting Algorithm and Relaxation Strategies of the Landweber Method for Image Reconstruction. Math. Probl. Eng. 2018, 2018, 5674647. [Google Scholar] [CrossRef]
- Qu, G.; Wang, C.; Jiang, M. Necessary and Sufficient Convergence Conditions for Algebraic Image Reconstruction Algorithms. IEEE Trans. Image Process. 2009, 18, 435–440. [Google Scholar]
- Honauer, K.; Johannsen, O.; Kondermann, D.; Goldluecke, B. A Dataset and Evaluation Methodology for Depth Estimation on 4D Light Fields. In Proceedings of the Computer Vision—ACCV 2016, Taipei, Taiwan, 20–24 November 2016; pp. 19–34. [Google Scholar] [CrossRef]
- Jiang, X.; Le Pendu, M.; Farrugia, R.A.; Guillemot, C. Light Field Compression with Homography-Based Low-Rank Approximation. IEEE J. Sel. Top. Signal Process. 2017, 11, 1132–1145. Available online: https://www.irisa.fr/temics/demos/lightField/LowRank2/datasets/datasets.html (accessed on 17 March 2022). [CrossRef]
- Zhou, W.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans Image Process. 2004, 13, 600–612. [Google Scholar]
- Mittal, A.; Moorthy, A.K.; Bovik, A.C. No-Reference Image Quality Assessment in the Spatial Domain. IEEE Trans. Image Process. 2012, 21, 4695–4708. [Google Scholar] [CrossRef] [PubMed]
- Mittal, A.; Soundararajan, R.; Bovik, A.C. Making a “Completely Blind” Image Quality Analyzer. IEEE Signal Process. Lett. 2013, 20, 209–212. [Google Scholar] [CrossRef]
- Venkatanath, N.; Praneeth, D.; Bh, M.C.; Channappayya, S.S.; Medasani, S.S. Blind image quality evaluation using perception based features. In Proceedings of the 2015 Twenty First National Conference on Communications (NCC), Mumbai, India, 27 February–1 March 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Dansereau, D.G.; Pizarro, O.; Williams, S.B. Decoding, Calibration and Rectification for Lenselet-Based Plenoptic Cameras. In Proceedings of the IEEE Conference on Computer Vision & Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 1027–1034. Available online: https://au.mathworks.com/matlabcentral/fileexchange/75250-light-field-toolbox-v0-5 (accessed on 16 March 2022).
- Dansereau, D.G.; Pizarro, O.; Williams, S.B. Linear Volumetric Focus for Light Field Cameras. ACM Trans. Graph. 2015, 34, 15. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Average SSIM and PSNR for All Views | |||||
|---|---|---|---|---|---|---|
| 2 | 5 | 10 | ||||
| SSIM | PSNR | SSIM | PSNR | SSIM | PSNR | |
| LVS | 0.7411 | 21.3103 | 0.7778 | 23.446 | 0.8458 | 25.2633 |
| FI | 0.4032 | 10.7146 | 0.7653 | 16.7028 | 0.8804 | 24.2654 |
| Our method | 0.7618 | 17.2243 | 0.9133 | 26.8554 | 0.9373 | 27.5334 |
| Method | Average SSIM and PSNR for All Views | |||||
|---|---|---|---|---|---|---|
| Boxes | ||||||
| SSIM | PSNR | SSIM | PSNR | SSIM | PSNR | |
| LVS | 0.8717 | 26.7195 | 0.8458 | 25.2633 | 0.8164 | 24.0324 |
| FI | 0.9122 | 27.2251 | 0.8804 | 24.2654 | 0.8635 | 22.3545 |
| Our method | 0.9183 | 27.4617 | 0.9385 | 27.4987 | 0.9491 | 27.0213 |
| Rosemary | ||||||
| SSIM | PSNR | SSIM | PSNR | SSIM | PSNR | |
| LVS | 0.9008 | 26.7446 | 0.8799 | 25.4402 | 0.8488 | 24.2101 |
| FI | 0.9194 | 27.1431 | 0.9136 | 26.8578 | 0.9051 | 25.8106 |
| Our method | 0.9223 | 27.4177 | 0.9360 | 27.7976 | 0.9432 | 27.4324 |
| Method | Average SSIM and PSNR for All Views | |||||
|---|---|---|---|---|---|---|
| Fruits | Pets | |||||
| BRISQUE | NIQE | PIQE | BRISQUE | NIQE | PIQE | |
| LVS | 40.6613 | 4.4096 | 29.5531 | 39.8596 | 3.0506 | 56.662 |
| FI | 53.6426 | 4.3635 | 86.9005 | 46.574 | 4.4673 | 81.8001 |
| Our method | 10.033 | 3.1677 | 11.1459 | 25.6965 | 2.3513 | 39.3187 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Qu, G.; Gao, S. The Block Landweber Iterative Method for Light Field Reconstruction from a Focal Stack. Photonics 2023, 10, 1219. https://doi.org/10.3390/photonics10111219
Liu Y, Qu G, Gao S. The Block Landweber Iterative Method for Light Field Reconstruction from a Focal Stack. Photonics. 2023; 10(11):1219. https://doi.org/10.3390/photonics10111219
Chicago/Turabian StyleLiu, Yuhan, Gangrong Qu, and Shan Gao. 2023. "The Block Landweber Iterative Method for Light Field Reconstruction from a Focal Stack" Photonics 10, no. 11: 1219. https://doi.org/10.3390/photonics10111219
APA StyleLiu, Y., Qu, G., & Gao, S. (2023). The Block Landweber Iterative Method for Light Field Reconstruction from a Focal Stack. Photonics, 10(11), 1219. https://doi.org/10.3390/photonics10111219