
Induced EMF THD Reduction Design of Permanent Magnet Synchronous Generators for Diesel Engine Generators


Abstract
1. Introduction
2. Proposed Design Process of PMSG
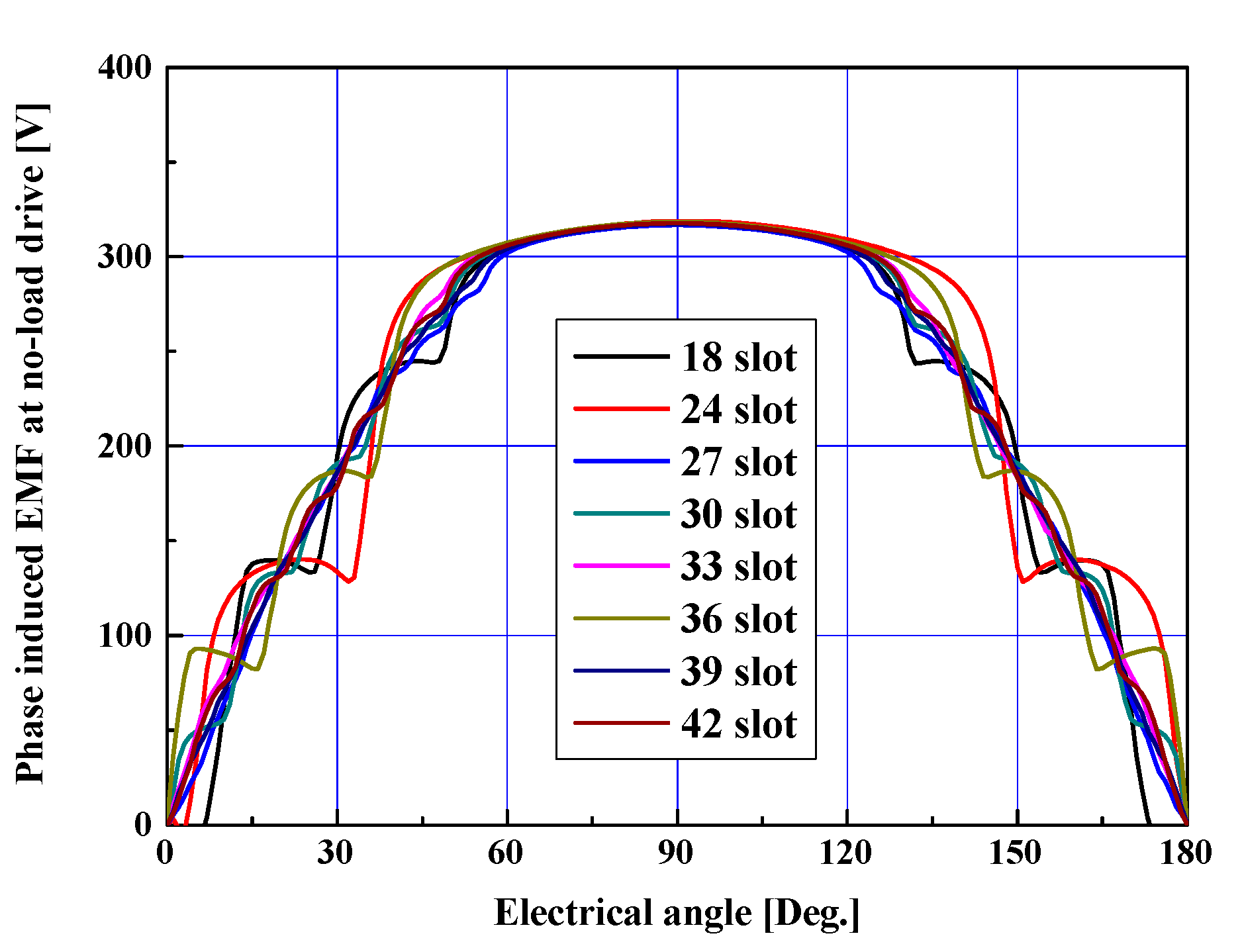
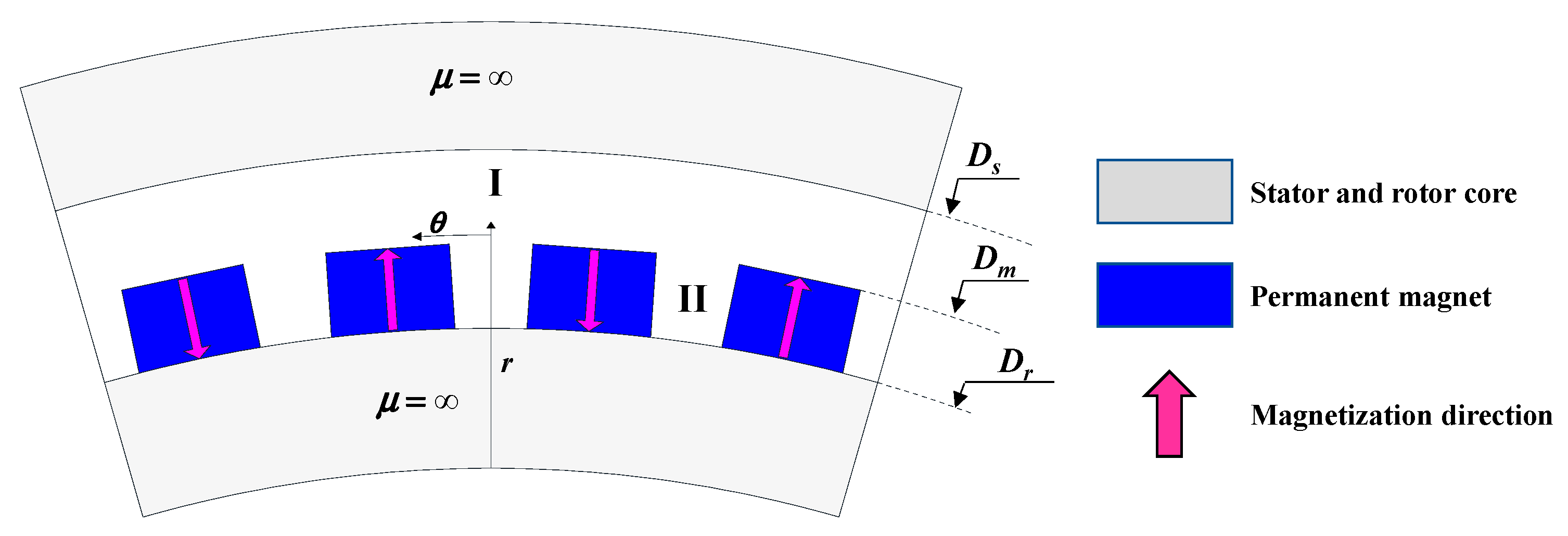
2.1. Selection of Pole and Slot Number
- The end effect is neglected;
- Permeability of the cores in the stator and rotor µ is infinite;
- The tooth tip of the slot open in the stator is neglected;
- The permanent magnet has a constant periodicity in θ direction.
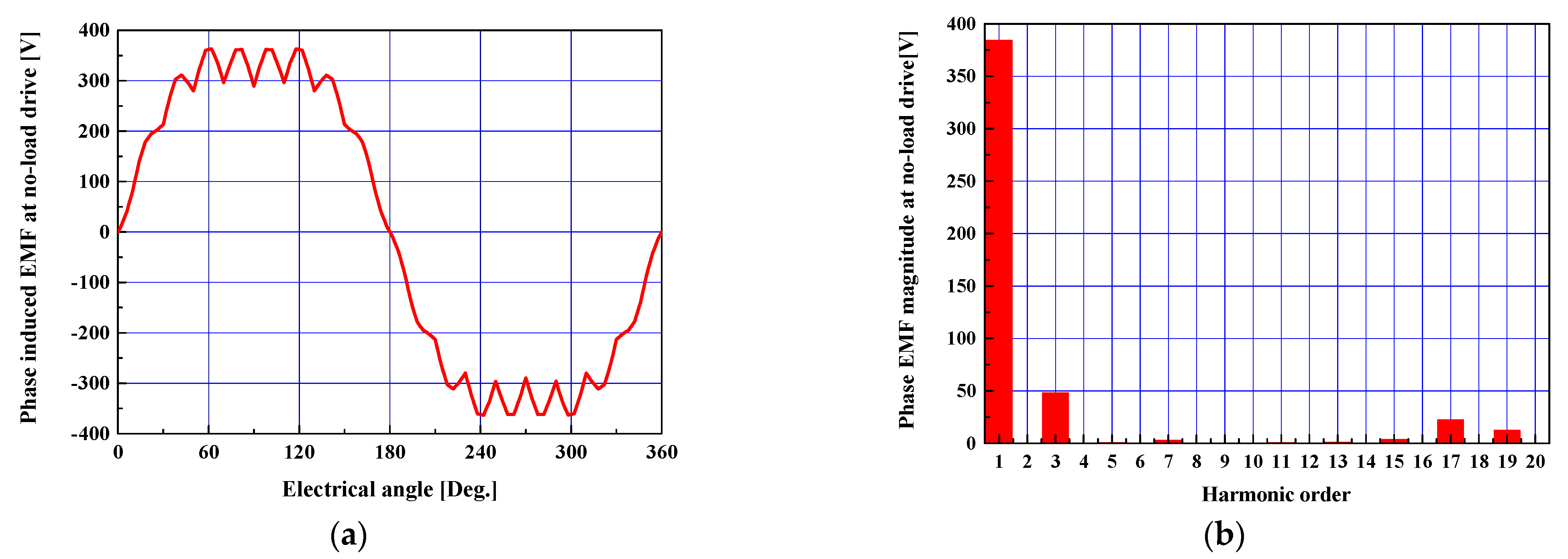
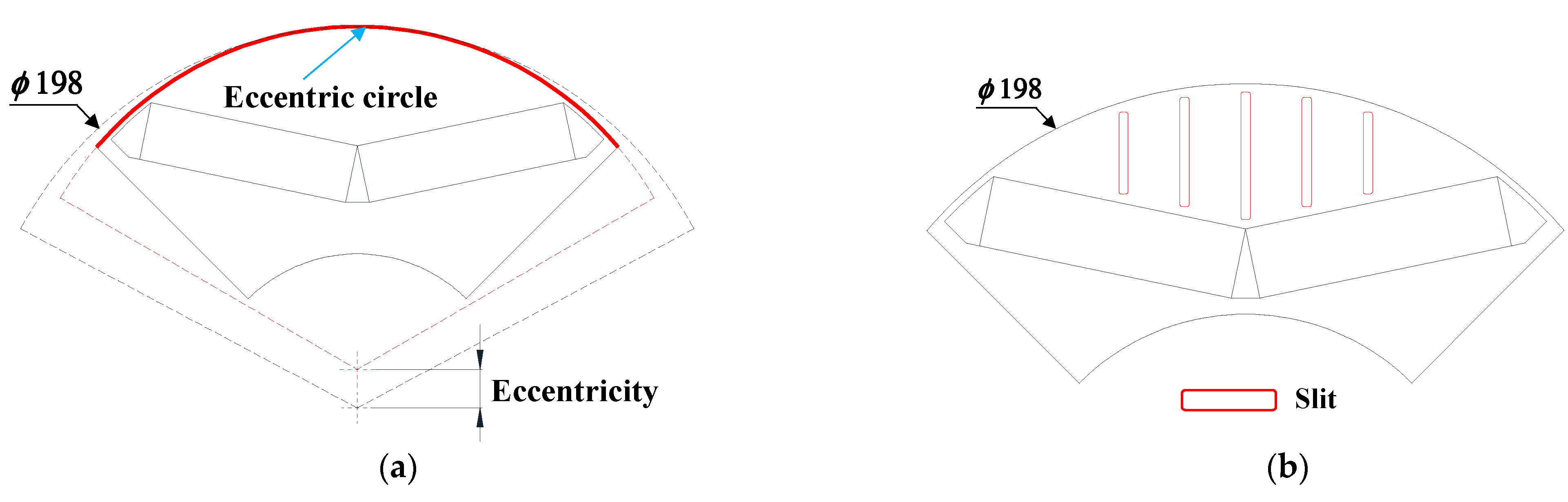
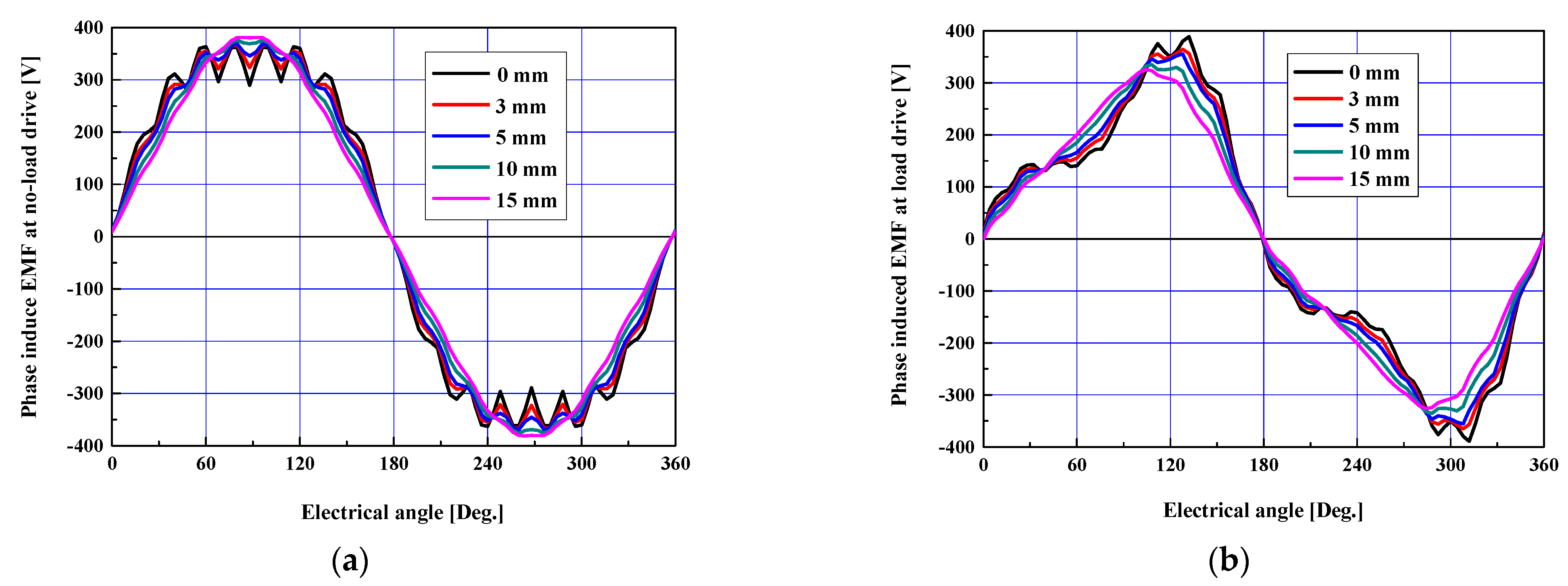
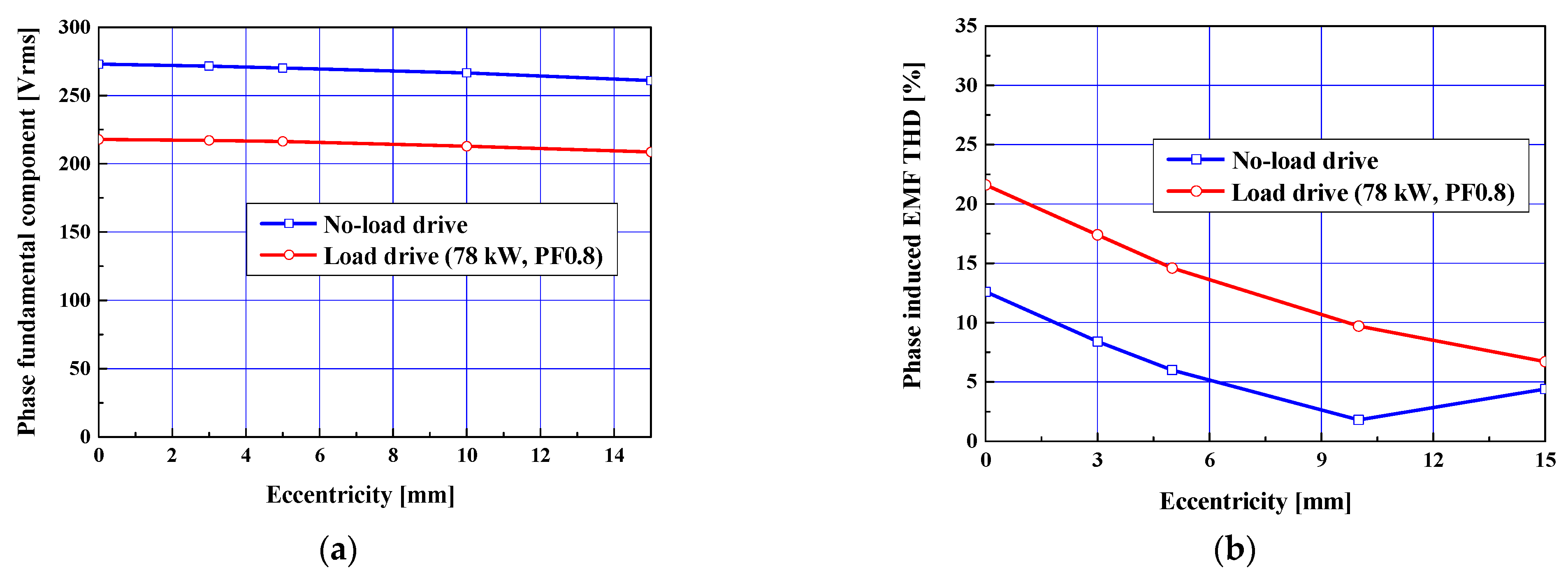
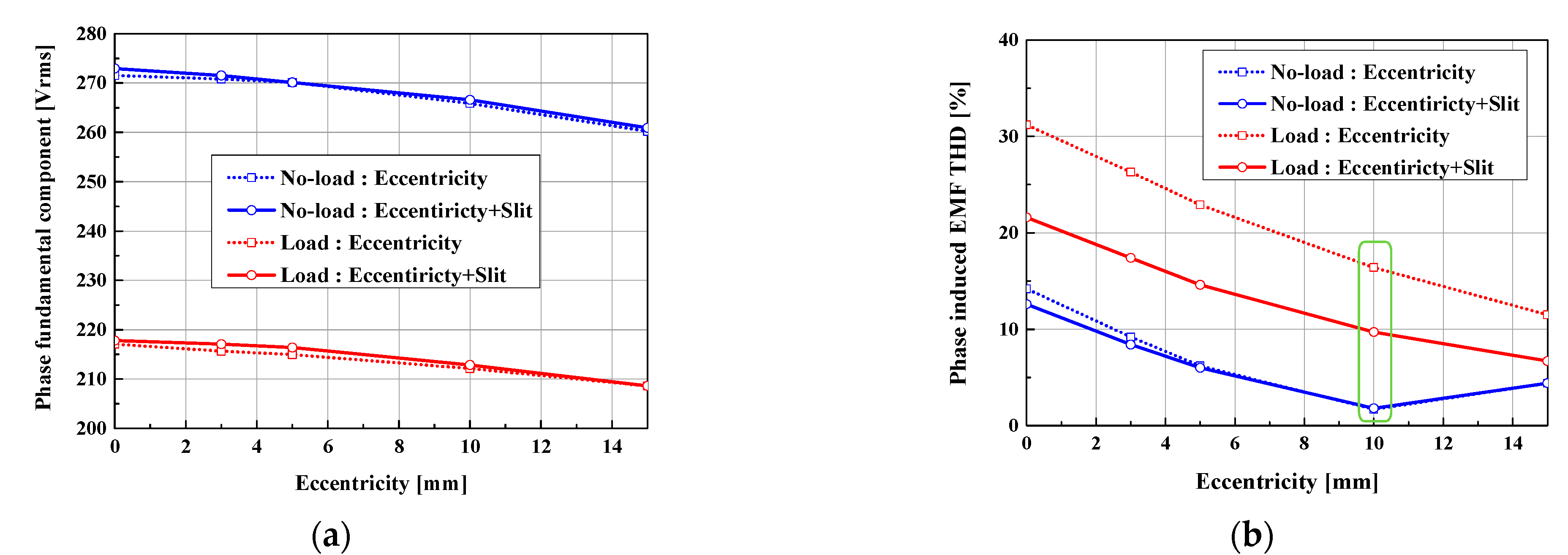
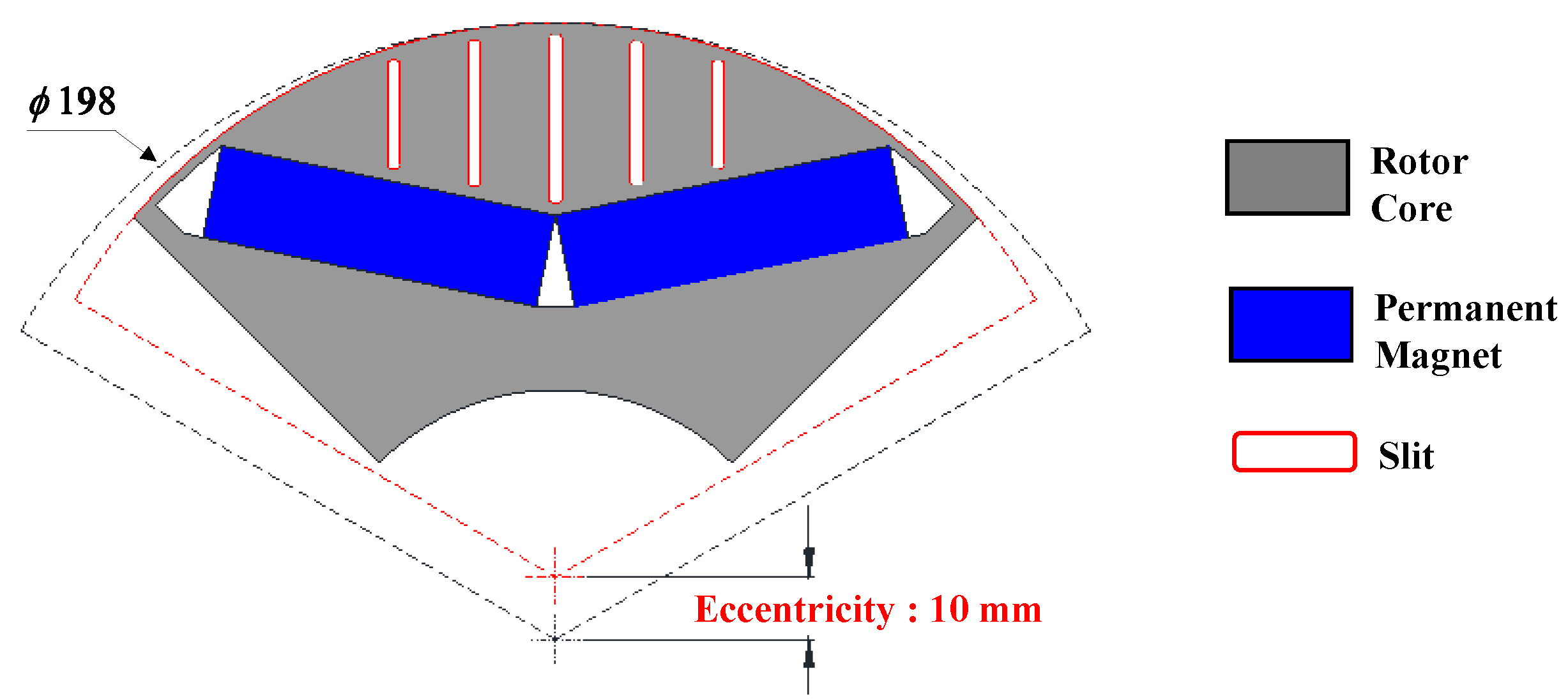
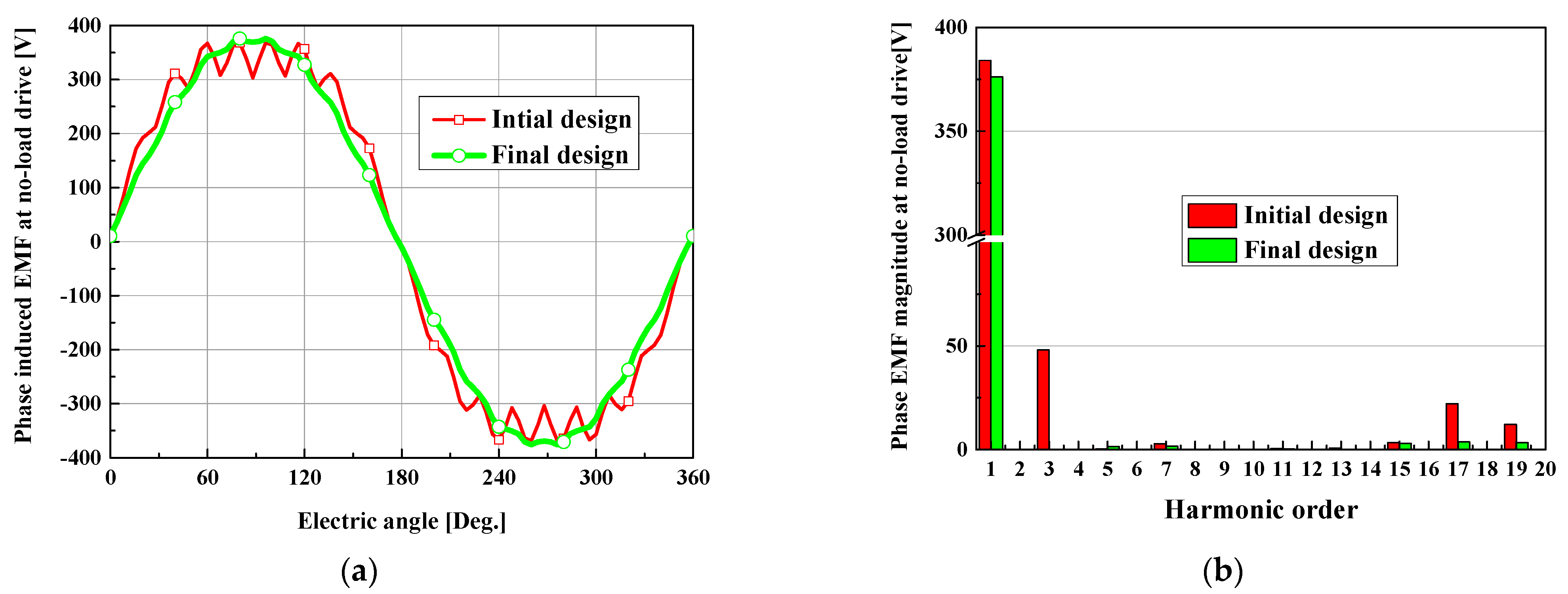
2.2. Reduction Design of the Induced EMF THD
3. Generator Characteristics and Analysis of Mechanical Stiffness
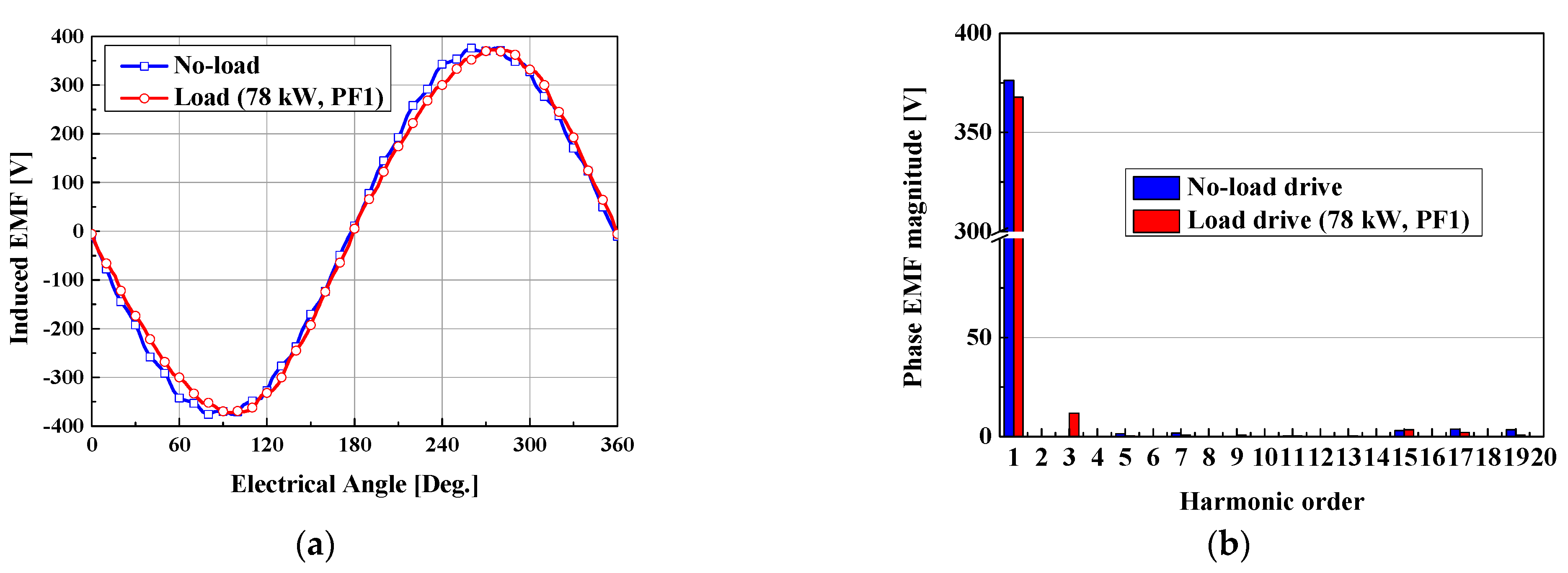
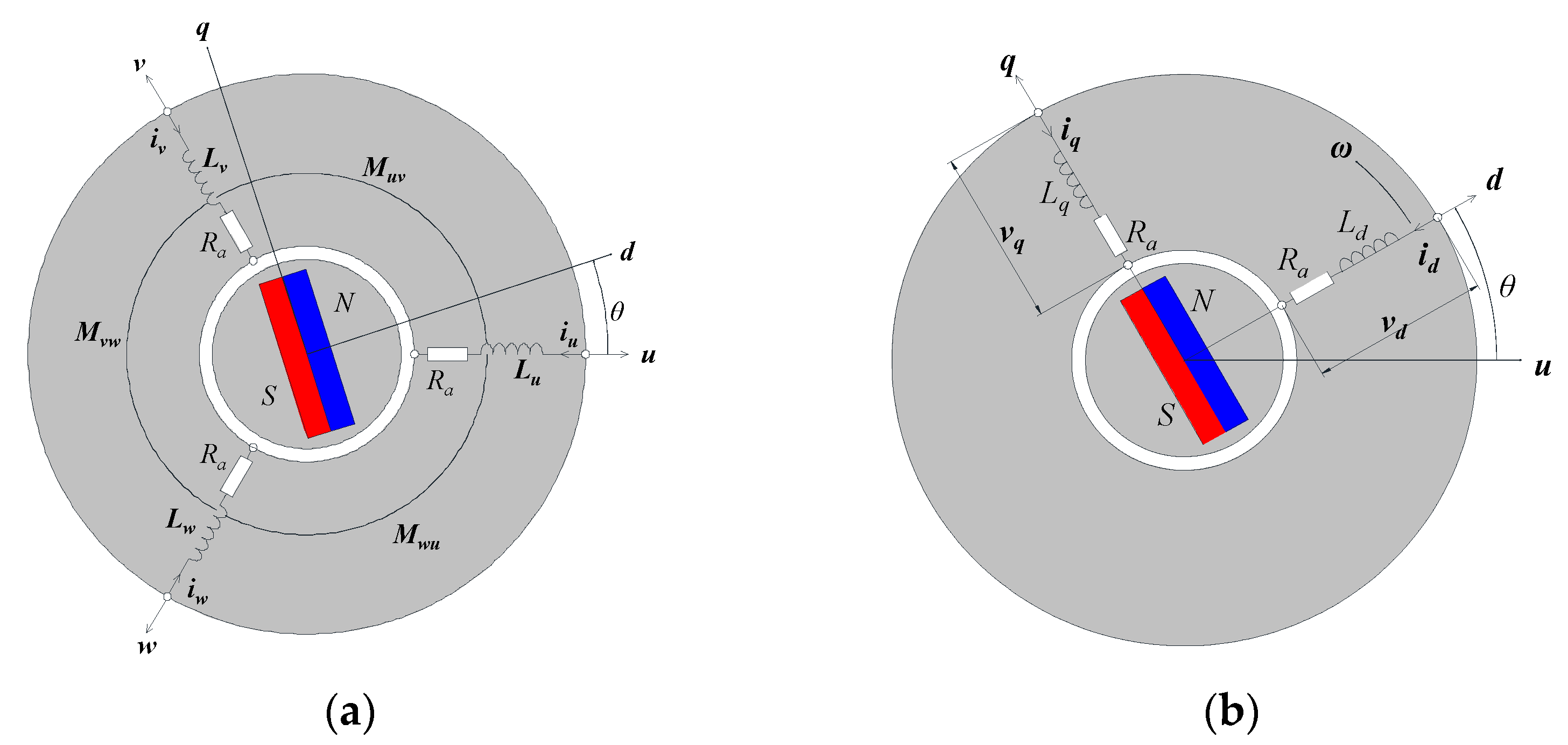
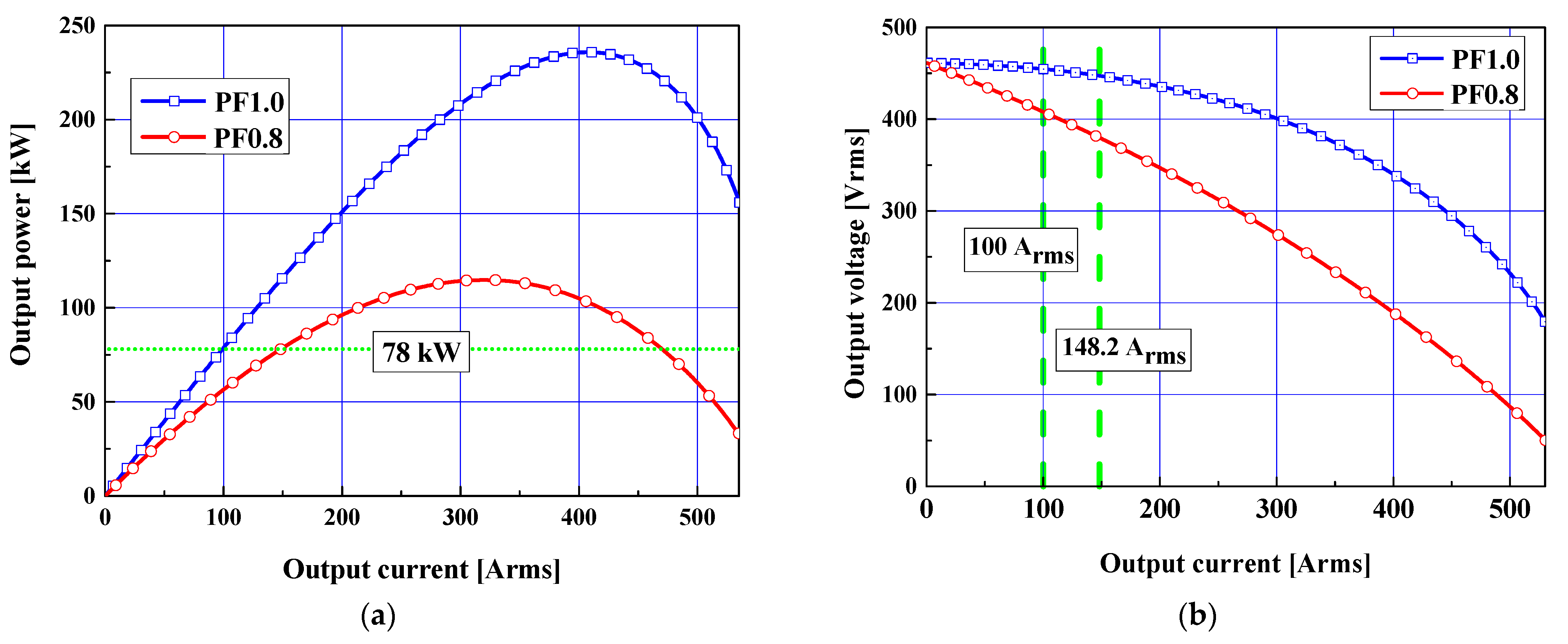
3.1. Generator Characteristics
3.2. Analysis of Mechanical Stiffness
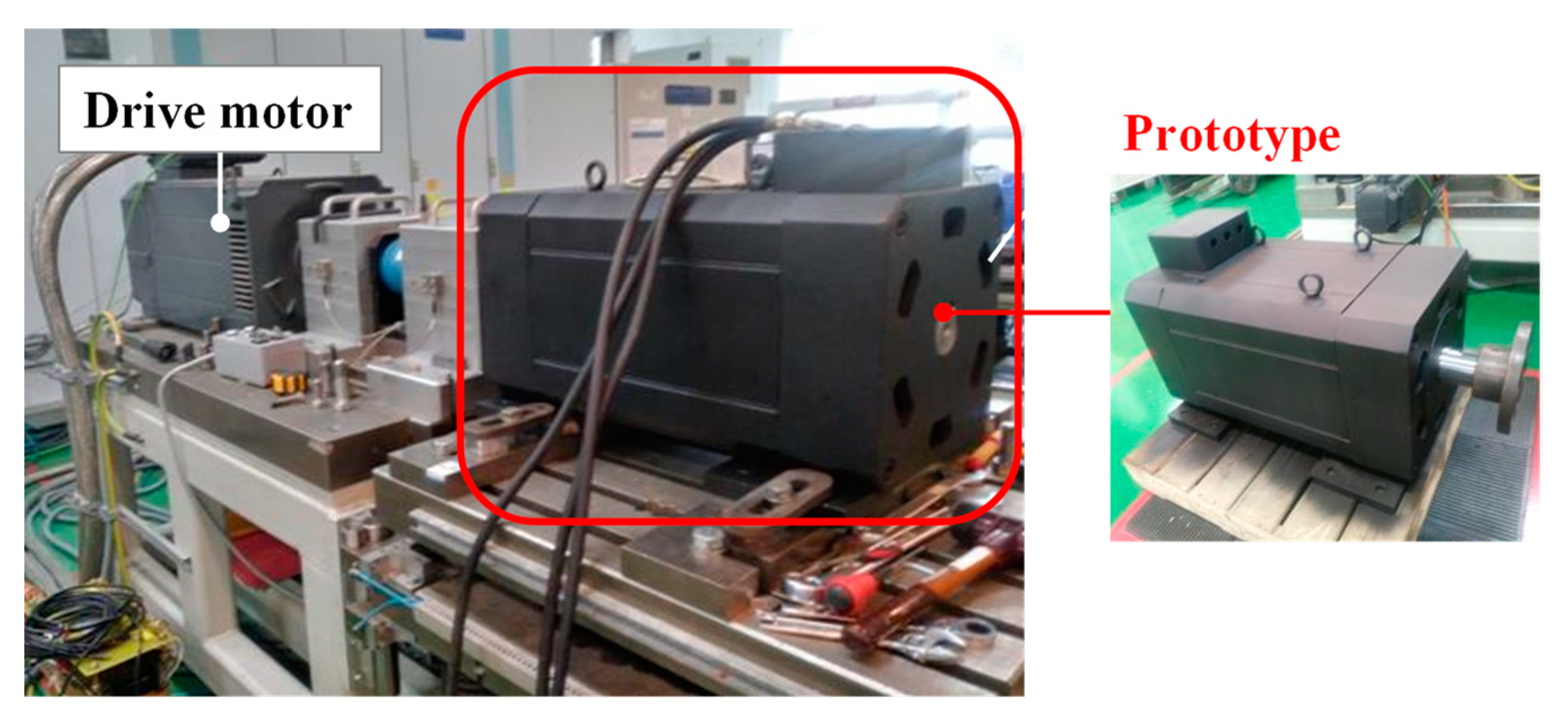
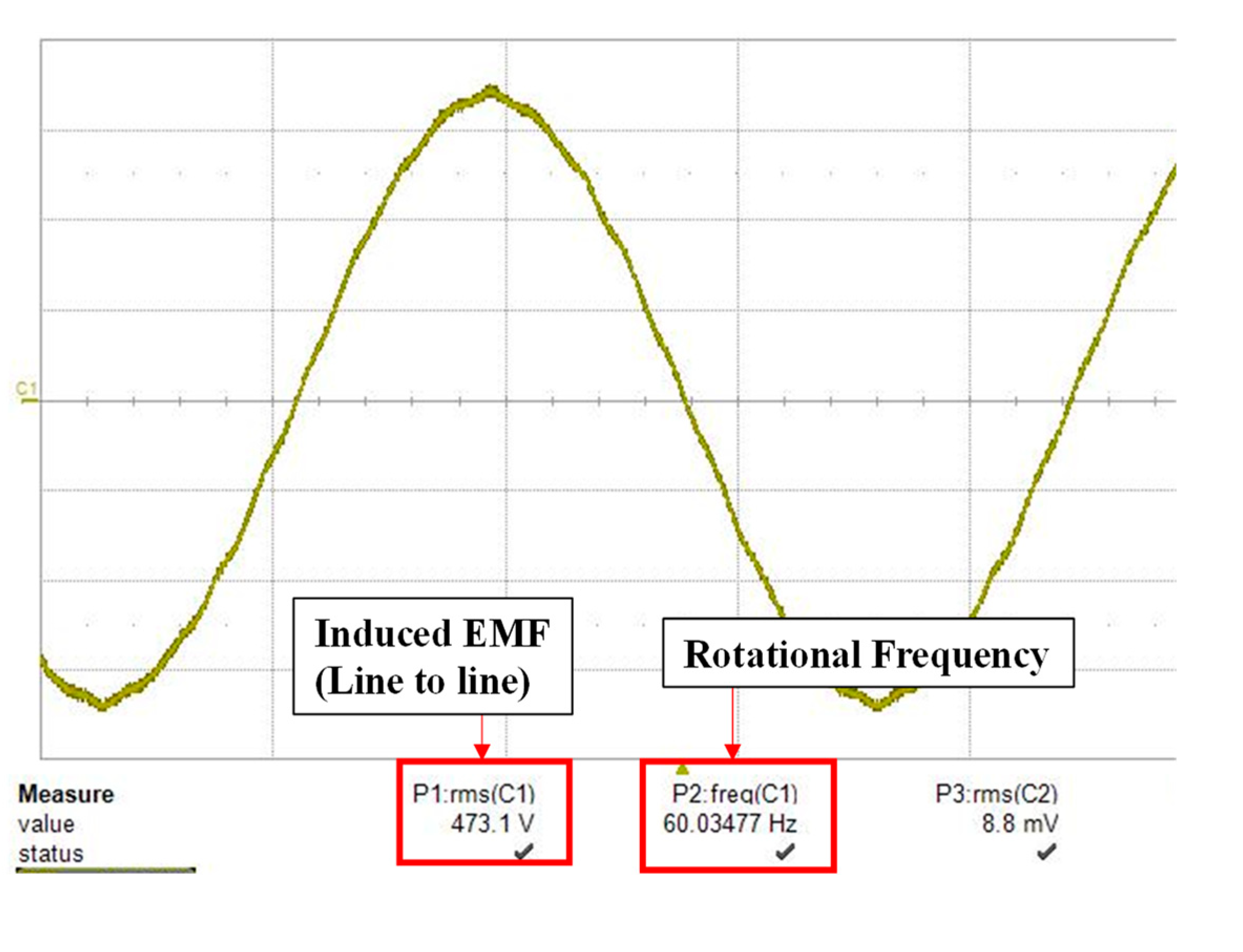
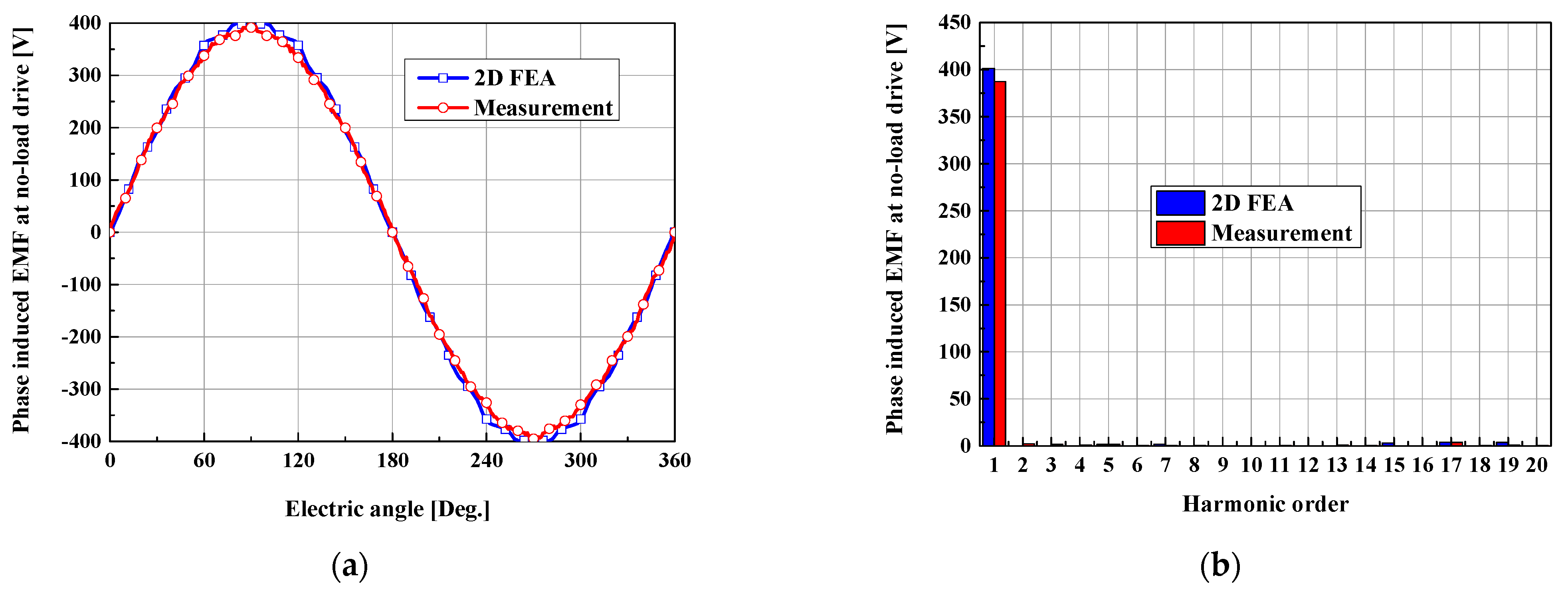
4. Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| ψa | Magnetic flux linkage on dq axis |
| Ld, Lq | Inductances on dq axis |
| Ra | Phase resistance |
| Rc | Core loss resistance on dq axis |
| icd, icq | Currents for core loss resistance Rc for dq axis |
| id, iq | Currents on dq axis |
| vod, voq | Voltages for core loss resistance Rc for dq axis |
| vd, vq | Voltages on dq axis |
| ω | Electric angular velocity |
| ωm | Mechanical angular velocity |
| θ | Rotor position |
| Lu, Lv, Lw | Self-inductances of each phase for 3-phase model |
| Muv, Mvw, Mwu | Mutual inductances of each phase for 3-phase model |
| iu, iv, iw | Currents of each phase for 3-phase model |
| vu, vv, vw | Voltages of each phase for 3-phase model |
| ψf | Magnetic flux linkage for 3-phase model |
| p | Differential operator |
References
- Kim, K.H.; Paul, S.; Bang, D.J.; Chang, J.H. Performance of permanent magnet synchronous generator for urban water pipleline energy harvester considering slotting and load effect on radial force characteristic. IEEE Trans. Magn. 2021, 57, 8203105. [Google Scholar] [CrossRef]
- Al-Adsani, A.; Beik, O. Design of a multiphase hybrid permanent magnet generator for series hybrid EV. IEEE Trans. Energy Convers. 2018, 33, 1499–1507. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Xia, Z.P.; Wu, L.J.; Jewell, G.W. Influence of slot and pole number combination on radial force and vibration modes in fractional slot PM brushless machines having single and double layer windings. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ICEM), San Jose, CA, USA, 20–24 September 2009. [Google Scholar]
- Fang, L.; Hong, J.P. Flux-barrier design technique for improving torque performance of interior permanent magnet synchronous motor for driving compressor in HEV. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Dearborn, MI, USA, 7–10 September 2009. [Google Scholar]
- Hwang, K.Y.; Kwon, B.I. Rotor pole design in spoke-type brushless DC motor by response surface method. IEEE Trans. Magn. 2007, 43, 1833–1836. [Google Scholar] [CrossRef]
- Ruangsinchaiwanich, S.; Zhu, Z.Q.; Howe, D. Influence of magnet shape on cogging torque and back-emf waveform in permanent magnet machines. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ICEM), Nanjing, China, 27–29 September 2005. [Google Scholar]
- Lee, C.S.; Cha, K.S.; Park, J.C.; Lim, M.S. Tolerance-insensitive design of the magnet shape for a surface permanent magnet synchronous motor. Energies 2020, 13, 1311. [Google Scholar] [CrossRef]
- Yu, J.S.; Lee, S.H. Stator and rotor shape optimum design of brushless permanent magnet motor for automotive cooling device. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Seoul, Korea, 9–12 October 2012. [Google Scholar]
- Park, Y.U.; Kim, D.K. A rotor shape design of interior PM motor for reducing cogging torque in electric air-conditioning system of HEV. In Proceedings of the International Conference Electrical Machines and Systems (ICEM), Busan, Korea, 26–29 October 2013. [Google Scholar]
- Ding, Z.; Zhang, B.; Yin, D. A design of fractional-slot concentrated winding IPM synchronous motor electric vehicle. In Proceedings of the 43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017. [Google Scholar]
- Yu, Y.; Liang, Z. The influence of optimizing rotor on the performance and the iron loss of the permanent machine. In Proceedings of the International Conference Electrical Machines and Systems (ICEM), Hangzhou, China, 22–25 October 2014. [Google Scholar]
- Xu, H.; Li, J. A sleeve-free interior permanent magnet high speed motor with non-uniform airgap. In Proceedings of the IEEE International Electric & Drive Conference (IEMDC), San Diego, CA, USA, 12–15 May 2019. [Google Scholar]
- Kim, H.J.; Jeong, J.S.; Yoon, M.H.; Moon, J.W.; Hong, J.P. Simple size determination of permanent magnet synchronous machines. IEEE Trans. Ind. Electron. 2017, 64, 7972–7983. [Google Scholar] [CrossRef]
- Miller, T.J.E. Brushless Permanent-Magnet and Reluctance Motor Drives; Oxford Science Publications: New York, NY, USA, 1989; pp. 20–24. [Google Scholar]
- Hiramastu, D.; Tsujikwa, K.; Ueda, T.; Fujita, M. Winding method to reduce vibration and loss caused by fractional slot of synchronous machine. Electr. Eng. Jpn. 2017, 198, 1130–1137. [Google Scholar]
- Zhu, Z.Q.; Howe, D.; Bolte, E.; Ackermann, B. Instantaneous magnetic field distribution in brushless permanent magnet dc motors, part I: Open-circuit field. IEEE Trans. Magn. 1993, 29, 124–135. [Google Scholar] [CrossRef]
- Lubin, T.; Mezani, S.; Rezzoug, A. 2D exact analytical model for surface-mounted permanent-magnet motors with semi-closed slots. IEEE Trans. Magn. 2010, 47, 479–492. [Google Scholar] [CrossRef]
- Li, Y.; Chai, F.; Song, Z.; Li, Z. Analysis of vibrations in interior permanent magnet synchronous motors considering air-gap deformation. Energies 2017, 17, 1259. [Google Scholar] [CrossRef]
- Gieras, J.F.; Wang, C.; Lai, J.C. Noise of Poly Phase Electric Motors; CRC Press: Boca Raton, FL, USA, 2006; pp. 49–53. [Google Scholar]
- Jung, Y.H.; Park, M.R.; Lim, M.S. Asymmetric rotor design of IPMSM for vibration reduction under certain load condition. IEEE Trans. Energy Convers. 2020, 35, 928–937. [Google Scholar] [CrossRef]
- Qiao, W.; Qu, L.; Harley, R.G. Control of IPM synchronous generator for maximum wind power generation considering magnetic saturation. IEEE Trans. Ind. Appl. 2009, 45, 1095–1105. [Google Scholar] [CrossRef]
- Levron, Y.; Belkov, J.; Baimel, D. A tutorial on dynamics and control of power systems with distributed and renewable energy sources based on the DQ0 transformation. Appl. Sci. 2018, 8, 1661. [Google Scholar] [CrossRef]
- Jung, J.W.; Kim, D.J.; Hong, J.P. Mechanical stress reduction of rotor core of interior permanent magnet synchronous motor. IEEE Trans. Magn. 2014, 50, 911–914. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value | Unit |
|---|---|---|
| Rated power | 78 | kW |
| Rated speed | 1800 | rpm |
| Rated torque | 413.8 | Nm |
| Rated frequency | 60 | Hz |
| Line-to-line voltage | 380 | Vrms |
| Fill factor | 41.3 | % |
| Magnetic flux density | 1.2 (100 ℃) | T |
| Cooling method | Air-forced cooling | |
| Efficiency | 95 | % |
| TRV | 29 | kNm/m3 |
| SR | 2.37 | |
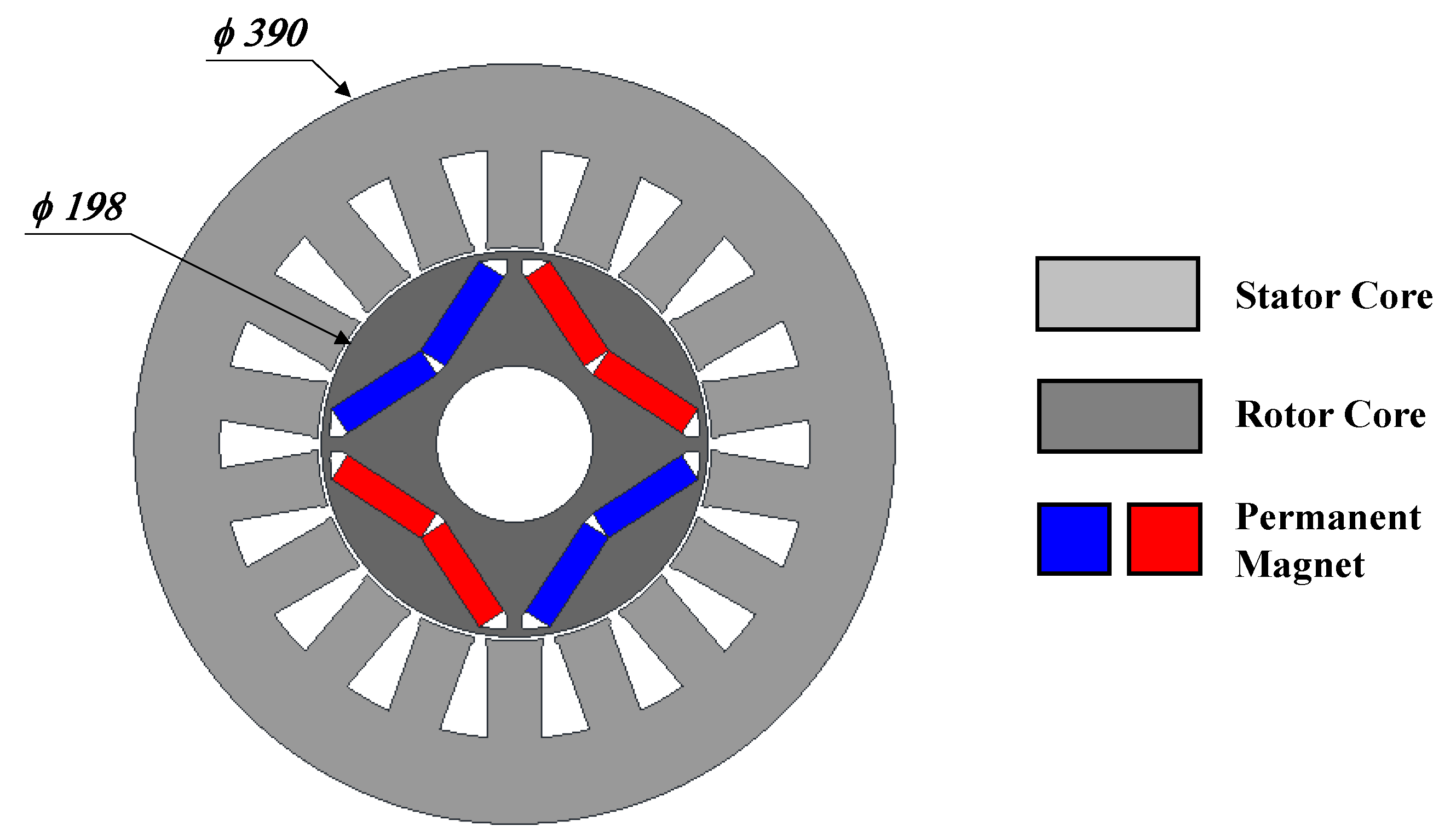
| Stack length of rotor | 470 | mm |
| Diameter of rotor | 198 | mm |
| Slot Number | Fundamental Component [Vrms] | Induced EMF THD [%] | q | rλ |
|---|---|---|---|---|
| 18 | 242.1 | 9.3 | 1.5 | 4 |
| 24 | 248.3 | 13.4 | 2 | 4 |
| 27 | 241.1 | 6.2 | 2.25 | 2 |
| 30 | 244.0 | 7.7 | 2.5 | 4 |
| 33 | 245.1 | 7.5 | 2.75 | 2 |
| 36 | 246.7 | 11.1 | 3 | 4 |
| 39 | 243.1 | 6.8 | 3.25 | 2 |
| 42 | 244.8 | 7.4 | 3.5 | 4 |
| Proposed Model | Fundamental Component [Vrms] | THD [%] | ||
|---|---|---|---|---|
| No-Load | Load (78 kW, PF0.8) | No-Load | Load (78 kW, PF0.8) | |
| Eccentricity | 265.9 | 212.1 | 1.7 | 16.4 |
| Eccentricity + slit | 266.6 | 212.8 | 1.8 | 9.7 |
| Model | Fundamental Component [Vrms] | THD [%] | ||
|---|---|---|---|---|
| No-Load | Load (78 kW, PF0.8) | No-Load | Load (78 kW, PF0.8) | |
| Initial design | 265.9 | 212.1 | 1.7 | 16.4 |
| Final design | 266.6 | 212.8 | 1.8 | 9.7 |
| Power Factor | Voltage [Vrms] (Line-to-Line) | Output Current [Arms] | Efficiency [%] | Voltage Regulation [%] |
|---|---|---|---|---|
| 1.0 | 454.7 | 99.5 | 98.2 | 1.5 |
| 0.8 | 379.8 | 148.2 | 97.7 | 17.4 |
| Result | Fundamental Component [Vrms] | THD [%] | |
|---|---|---|---|
| Phase | Line-to-Line | ||
| 2D FEA | 283.8 | 491.6 | 1.7 |
| Measurement | 273.1 | 473.1 | 1.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, C.-S.; Kim, H.-J. Induced EMF THD Reduction Design of Permanent Magnet Synchronous Generators for Diesel Engine Generators. Processes 2021, 9, 986. https://doi.org/10.3390/pr9060986
Lee C-S, Kim H-J. Induced EMF THD Reduction Design of Permanent Magnet Synchronous Generators for Diesel Engine Generators. Processes. 2021; 9(6):986. https://doi.org/10.3390/pr9060986
Chicago/Turabian StyleLee, Chung-Seong, and Hae-Joong Kim. 2021. "Induced EMF THD Reduction Design of Permanent Magnet Synchronous Generators for Diesel Engine Generators" Processes 9, no. 6: 986. https://doi.org/10.3390/pr9060986
APA StyleLee, C.-S., & Kim, H.-J. (2021). Induced EMF THD Reduction Design of Permanent Magnet Synchronous Generators for Diesel Engine Generators. Processes, 9(6), 986. https://doi.org/10.3390/pr9060986