
Optimal Quick-Response Variable Structure Control for Highly Efficient Single-Phase Sine-Wave Inverters


 ,
,  ,
, 
Abstract
:1. Introduction
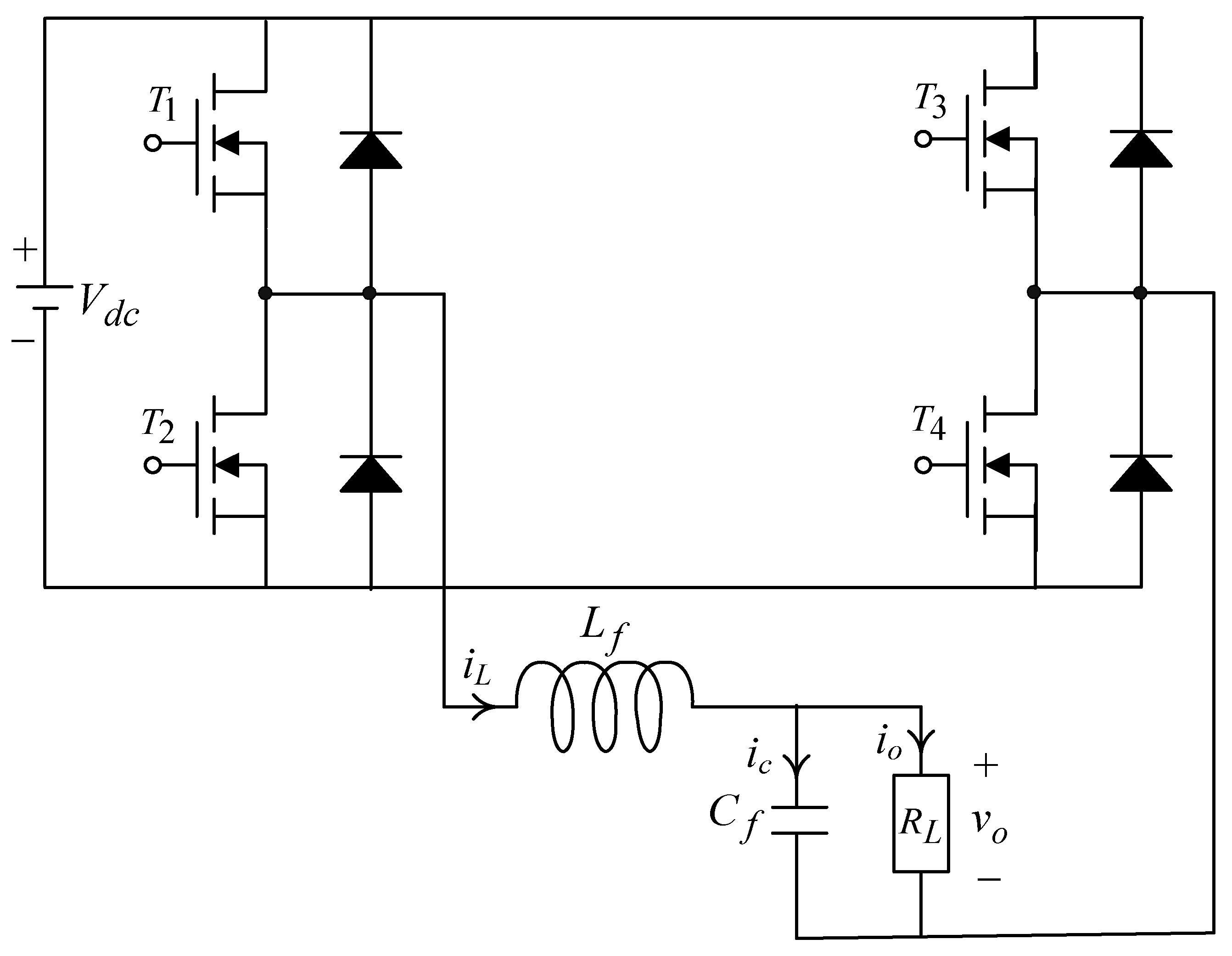
2. Description of the Dynamic Model with a Single-Phase Sine-Wave Inverter
3. Control Design and Parameter Optimization
- (1)
- Population clustering: The individuals of the population are clustered into subgroups using k-means, and then the individuals are ranked according to the fitness function, with the best fitness value in each subgroup being defined as the central individual and the rest as general individuals.
- (2)
- Individual variation: A random number between 0 to 1 is randomly generated and if it is greater than a pre-defined probability parameter , the central individual of a subgroup is randomly selected and replaced with a new randomly generated individual.
- (3)
- Generation of new individuals: a random number between 0 to 1 with a pre-determined probability parameter is generated at random and compared with . The latter is generated in the following two ways:
- a.
- If , a subgroup is randomly selected and either the central individual of the subgroup is chosen or a general individual is randomly selected as the candidate .
- b.
- If , then two subgroups are randomly selected and either two subgroup centroids are selected or a general individual is randomly selected in each subgroup as and respectively, which are then combined according to Equation (10) to give the candidate .
- (4)
- Individual selection: The adaptation function value of the new individual is compared with the adaptation function value of the candidate individual , and the individual with a good adaptation degree enters the next generation; the operation of generating a new individual is repeated, and when an new individual is generated, it enters the next overlapping procedure.
- (5)
- If an individual meets the optimal solution conditions or the pre-defined number of overlapping generations, the algorithm ends; otherwise, the procedure is repeated to start a new overlapping procedure.
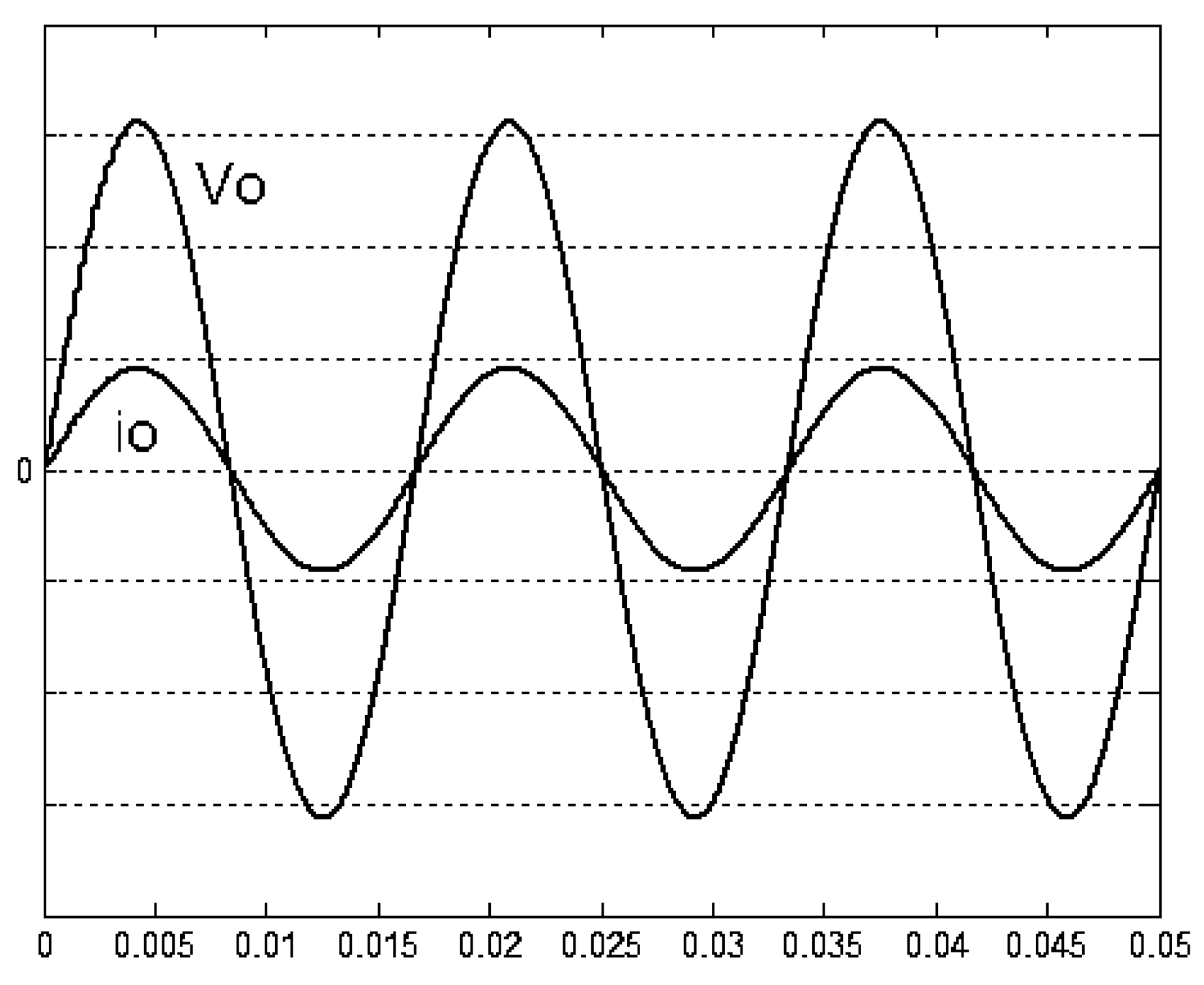
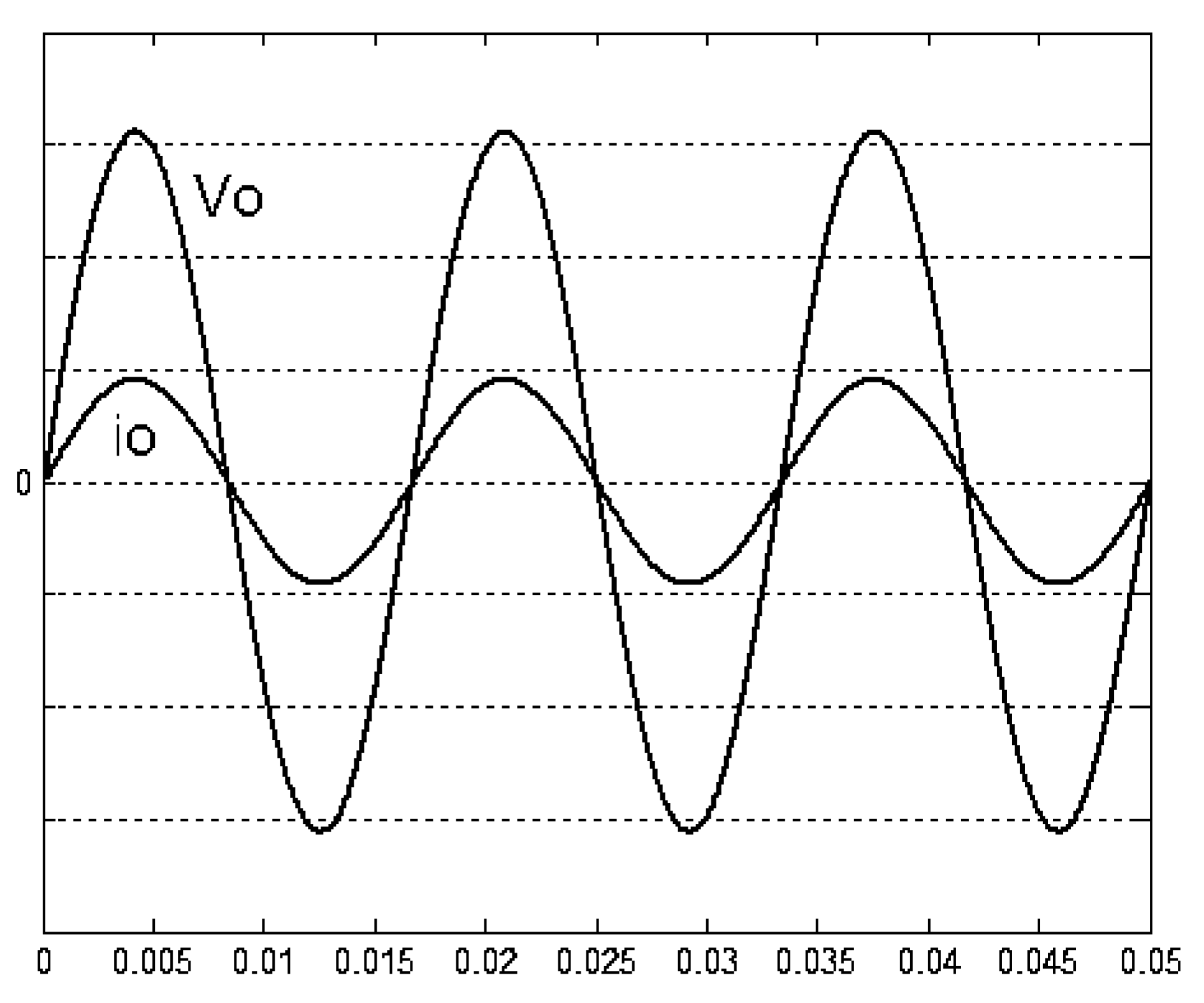
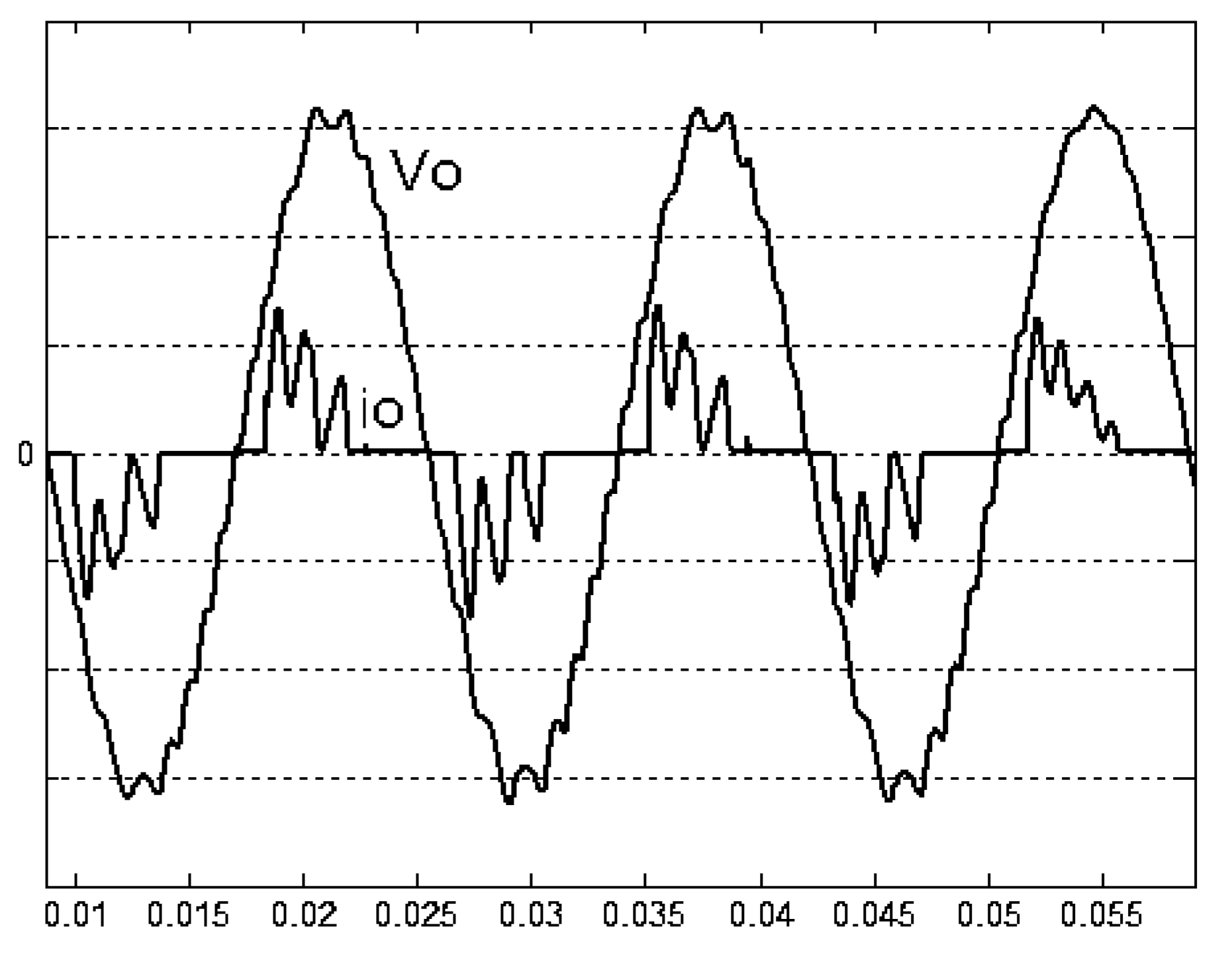
4. Simulations, Experiments, and Discussions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kumar, V.; Behera, R.K.; Joshi, D.; Bansal, R. Power Electronics, Drives, and Advanced Applications; CRC Press: Boca Raton, FL, USA, 2020. [Google Scholar]
- Blaabjerg, F. Control of Power Electronic Converters and Systems; Academic Press: Cambridge, MA, USA, 2018. [Google Scholar]
- Wilamowski, B.M.; Irwin, J.D. Power Electronics and Motor Drives; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Branko, L.D.; Branko, B. Power Electronics: Converters and Regulators; Springer: New York, NY, USA, 2015. [Google Scholar]
- Yuriy, R.; Sergey, R.; Evgeny, C.; Pavel, V. Power Electronics Basics: Operating Principles, Design, Formulas, and Applications; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- IEEE Std 519-2014. IEEE Recommended Practice and Requirements for Harmonic Control in Electric Power Systems. In Proceedings of the IEEE Std 519-2014 (Revision of IEEE Std 519-1992), New York, NY, USA, 11 June 2014; pp. 1–29.
- Standard EN 50160. Voltage Characteristics of Electricity Supplied by Public Distribution Systems; EN 50160; CENELEC: Brussels, Belgium, 2010. [Google Scholar]
- Arunkumar, G.; Dhanamjayulu, C.; Padmanaban, S.; Prusty, B.R.; Khan, B. Implementation of Optimization-Based PI Controller Tuning for Non-Ideal Differential Boost Inverter. IEEE Access 2021, 9, 58677–58688. [Google Scholar] [CrossRef]
- Ally, C.Z.; Jong, E.C.W. Robust PI control of a grid-connected voltage source inverter for virtual inertia response in weak grid conditions. In Proceedings of the 2019 International Conference on Smart Energy Systems and Technologies, Porto, Portugal, 9–11 September 2019; pp. 1–6. [Google Scholar]
- Ghosh, S.; Moulik, B.; Singh, H.P. Coordinated Converter-Inverter PI based Grid Tied Photovoltaic System. In Proceedings of the 2021 6th International Conference for Convergence in Technology, Maharashtra, India, 2–4 April 2021; pp. 1–7. [Google Scholar]
- Hou, H.; Zhang, S.G.; Yang, J.W.; Hu, W.W. Harmonic suppression of LCL grid-connected inverter based on PI control. In Proceedings of the 2021 International Conference on Artificial Intelligence and Electromechanical Automation, Guangzhou, China, 14–16 May 2021; pp. 15–18. [Google Scholar]
- Wang, X.Q.; Wang, Z.; Xu, Z.X.; Wang, W.; Wang, B.; Zou, Z.X. Deadbeat Predictive Current Control-Based Fault-Tolerant Scheme for Dual Three-Phase PMSM Drives. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 1591–1604. [Google Scholar] [CrossRef]
- Khatib, H.E.; Peña, M.; Grothmann, B.; Gedlu, E.; Saur, M. Flux Observer-Based MTPF/MTPV-Operation with Low Parameter Sensitivity Applying Deadbeat-Direct Torque and Flux Control. IEEE Trans. Ind. Appl. 2021, 57, 2494–2504. [Google Scholar] [CrossRef]
- Serrano-Delgado, J.; Mattavelli, P.; Cobreces, S.; Abedini, H.; Rizo, M.; Buso, S.; Bueno, E.J. Output Capacitance Minimization for Converters in DC Microgrids via Multi-Objective Tuning of Droop-Based Controllers. IEEE Access 2020, 8, 222700–222710. [Google Scholar] [CrossRef]
- Nicoletti, A.; Martino, M.; Karimi, A. A Robust Data-Driven Controller Design Methodology with Applications to Particle Accelerator Power Converters. IEEE Trans. Control Syst. Technol. 2019, 27, 814–821. [Google Scholar] [CrossRef]
- Xie, C.; Liu, D.; Li, K.; Zou, J.X.; Zhou, K.L.; Guerrero, J.M. Passivity-Based Design of Repetitive Controller for LCL-Type Grid-Connected Inverters Suitable for Microgrid Applications. IEEE Trans. Power Electron. 2021, 36, 2420–2431. [Google Scholar] [CrossRef]
- Ye, J.; Liu, L.G.; Xu, J.B.; Shen, A.W. Frequency Adaptive Proportional-Repetitive Control for Grid-Connected Inverters. IEEE Trans. Ind. Electron. 2021, 68, 7965–7974. [Google Scholar] [CrossRef]
- Steinberger, M.; Horn, M.; Fridman, L. Variable-Structure Systems and Sliding-Mode Control: From Theory to Practice; Springer International Publishing: Cham, Switzerland, 2020. [Google Scholar]
- Li, S.; Yu, X.; Fridman, L.; Man, Z.; Wang, X. Advances in Variable Structure Systems and Sliding Mode Control—Theory and Applications; Springer International Publishing: Cham, Switzerland, 2018. [Google Scholar]
- Itkis, U. Control Systems of Variable Structure; Wiley: New York, NY, USA, 1976. [Google Scholar]
- Utkin, V.I. Variable Structure Systems with Sliding Modes. IEEE Trans. Autom. Control 1977, AC-22, 212–222. [Google Scholar] [CrossRef]
- Ahmed, A.A.; Ahmad, R.B.; Yahya, A.; Tahir, H.H.; Quinlan, J. Variable Structure System with Sliding Mode Controller. Procedia Eng. 2013, 53, 441–452. [Google Scholar] [CrossRef]
- Chauhan, U.; Singh, V.; Rani, A. PV Fed Sliding Mode controlled SEPIC converter with Single Phase Inverter. In Proceedings of the 2020 5th International Conference on Communication and Electronics Systems, Coimbatore, India, 10–12 June 2020; pp. 20–25. [Google Scholar]
- Stefanello, M.; Massing, J.R.; Vieira, R.P. Robust control of a grid-connected converter with an LCL-filter using a combined sliding mode and adaptive controller in a multi-loop framework. In Proceedings of the 2015 41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015; pp. 3726–3731. [Google Scholar]
- Martins, L.T.; Pinheiro, H.; Stefanello, M.; Vieira, R.P. Sliding mode-based multi-loop current control of a LCL grid-tied converter. In Proceedings of the 2017 IEEE 8th International Symposium on Power Electronics for Distributed Generation Systems, Florianopolis, Brazil, 17–20 April 2017; pp. 1–6. [Google Scholar]
- Wang, Y.; Wai, R.J. Design of Discrete-Time Backstepping Sliding-Mode Control for LCL-Type Grid-Connected Inverter. IEEE Access 2020, 8, 95082–95098. [Google Scholar] [CrossRef]
- Jung, S.L.; Tzou, Y.Y. Discrete feedforward sliding mode control of a PWM inverter for sinusoidal output waveform synthesis. In Proceedings of the 1994 Power Electronics Specialist Conference, Taipei, Taiwan, 20–25 June 1994; pp. 552–559. [Google Scholar]
- Esmaeili, H.; Asadi, M. A Sliding Mode Controller Based on Robust Model Reference Adaptive Proportional-integral Control for Stand-alone Three-phase Inverter. J. Mod. Power Syst. Clean Energy 2021, 9, 668–678. [Google Scholar] [CrossRef]
- Ayalew, B.; Yahaya, A.A.; Durra, A.A. Robust Continuous Nonlinear Predictive Controller (CNMPC) via Integral Sliding Mode Control (ISMC) for Grid-Tied PV Inverter. In Proceedings of the 2020 2nd International Conference on Smart Power & Internet Energy Systems, Bangkok, Thailand, 15–18 September 2020; pp. 514–519. [Google Scholar]
- Repecho, V.; Biel, D.; Olm, J.M. A Simple Switching-Frequency-Regulated Sliding-Mode Controller for a VSI with a Full Digital Implementation. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 569–579. [Google Scholar] [CrossRef]
- Gao, M.; Wang, D.; Li, Y.L.; Yuan, T.Q. Fixed Frequency Pulse-Width Modulation Based Integrated Sliding Mode Controller for Phase-Shifted Full-Bridge Converters. IEEE Access 2018, 6, 2181–2192. [Google Scholar] [CrossRef]
- Nair, R.R.; Behera, L.; Kumar, S. Event-Triggered Finite-Time Integral Sliding Mode Controller for Consensus-Based Formation of Multirobot Systems with Disturbances. IEEE Trans. Control Syst. Technol. 2019, 27, 39–47. [Google Scholar] [CrossRef]
- Hou, H.Z.; Yu, X.H.; Xu, L.; Rsetam, K.; Cao, Z.W. Finite-Time Continuous Terminal Sliding Mode Control of Servo Motor Systems. IEEE Trans. Ind. Electron. 2020, 67, 5647–5656. [Google Scholar] [CrossRef]
- Zak, M. Terminal Attractors for Addressable Memory in Neural Network. Phys. Lett. A 1988, 133, 18–22. [Google Scholar] [CrossRef]
- Zou, A.M.K.; Kumar, D.; Hou, Z.G.; Liu, X. Finite-Time Attitude Tracking Control for Spacecraft Using Terminal Sliding Model and Chebyshev Neural Network. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2011, 41, 950–963. [Google Scholar] [CrossRef] [PubMed]
- Lu, K.F.; Xia, Y.Q. Finite-Time Fault-Tolerant Control for Rigid Spacecraft with Actuator Saturations. IET Proc.-Control Theory Appl. 2013, 7, 1529–1539. [Google Scholar] [CrossRef]
- Shao, K.; Zheng, J.C.; Huang, K.; Wang, H.; Man, Z.H.; Fu, M.Y. Finite-Time Control of a Linear Motor Positioner Using Adaptive Recursive Terminal Sliding Mode. IEEE Trans. Ind. Electron. 2020, 67, 6659–6668. [Google Scholar] [CrossRef]
- Cheng, S.; Shi, Y.H. Brain Storm Optimization Algorithms: Concepts, Principles and Applications; Springer International Publishing: Cham, Switzerland, 2019. [Google Scholar]
- Xue, X.S.; Lu, J.W. A Compact Brain Storm Algorithm for Matching Ontologies. IEEE Access 2020, 8, 43898–43907. [Google Scholar] [CrossRef]
- Jiang, Y.X.; Chen, X.; Zheng, F.C.; Niyato, D.; You, X.H. Brain Storm Optimization-Based Edge Caching in Fog Radio Access Networks. IEEE Trans. Veh. Technol. 2021, 70, 1807–1820. [Google Scholar] [CrossRef]
- Wu, C.Y.; Fu, X.S. An Agglomerative Greedy Brain Storm Optimization Algorithm for Solving the TSP. IEEE Access 2020, 8, 201606–201621. [Google Scholar] [CrossRef]
- Aldhafeeri, A.; Rahmat-Samii, Y. Brain Storm Optimization for Electromagnetic Applications: Continuous and Discrete. IEEE Trans. Antennas Propag. 2019, 67, 2710–2722. [Google Scholar] [CrossRef]
- Jezernik, K.; Zadravec, D. Sliding Mode Controller for a Single Phase Inverter. In Proceedings of the Fifth Annual Applied Power Electronics Conference and Exposition, Los Angeles, CA, USA, 11–16 March 1990; pp. 185–190. [Google Scholar]
- Chiang, S.J.; Tai, T.S.; Lee, T.S. Variable Structure Control of UPS Inverters. IEE Proc.-Elect. Power Applicat. 1998, 145, 559–567. [Google Scholar] [CrossRef]
- Malesani, L.; Rossetto, L.; Spiazzi, G.; Zuccato, A. An AC Power Supply with Sliding-Mode Control. IEEE Ind. Appl. Mag. 1996, 2, 32–38. [Google Scholar] [CrossRef]
- Chan, C.Y. Servo-System with Discrete-Variable Structure Control. Syst. Contr. Lett. 1991, 17, 321–325. [Google Scholar] [CrossRef]
- Pandey, A.; Borkar, R.; Kumbhar, S.; Ghunke, P.; Jain, P. Comparison of Power Electronic Converters with Sliding Mode Control and Open Loop Control. In Proceedings of the 2020 International Conference on Convergence to Digital World-Quo Vadis (ICCDW), Mumbai, India, 18–20 February 2020; pp. 1–5. [Google Scholar]
- Mehta, A.; Naik, B. Sliding Mode Controllers for Power Electronic Converters; Springer: New York, NY, USA, 2019. [Google Scholar]
- Komurcugil, H.; Biricik, S.; Bayhan, S.; Zhang, Z. Sliding Mode Control: Overview of Its Applications in Power Converters. IEEE Ind. Electron. Mag. 2021, 15, 40–49. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| ) | 205 V |
| ) | 155.56 Vmax |
| Frequency of sine output voltage | 60 Hz |
| ) | 0.2 mH |
| 30 μF | |
| ) | 12 Ω |
| Switching frequency | 36 kHz |
| Conventional Limited-Time Convergent VSC | |
|---|---|
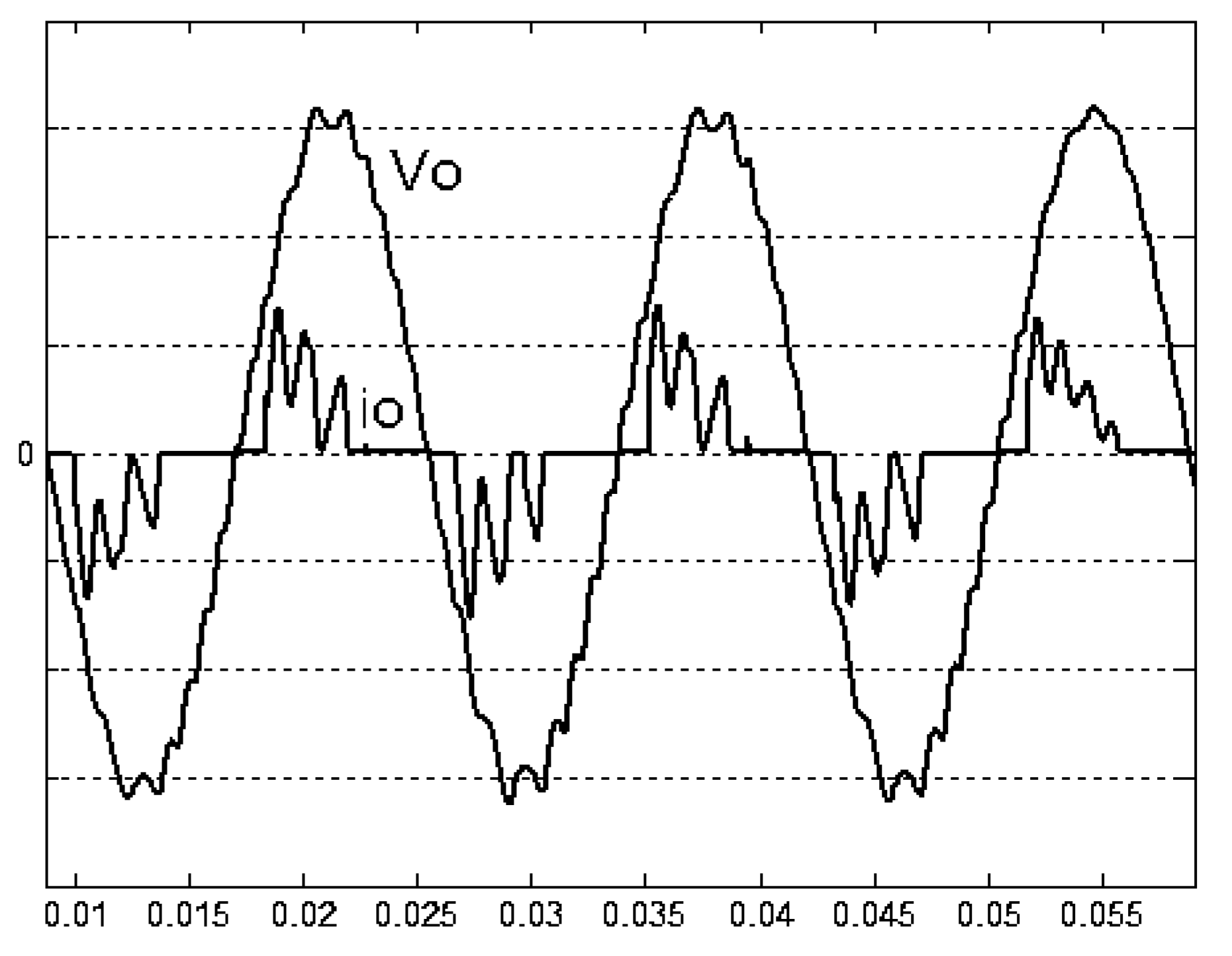
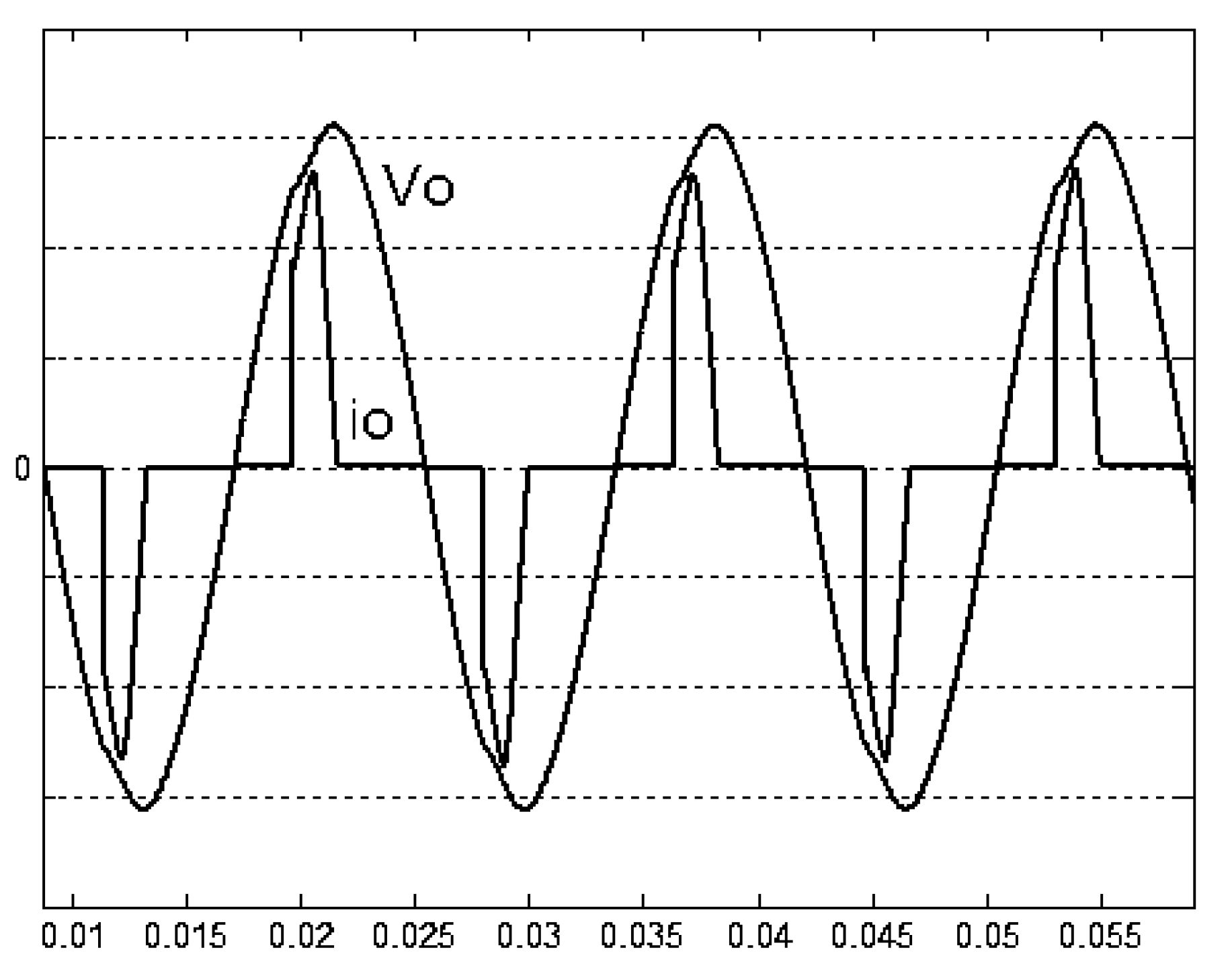
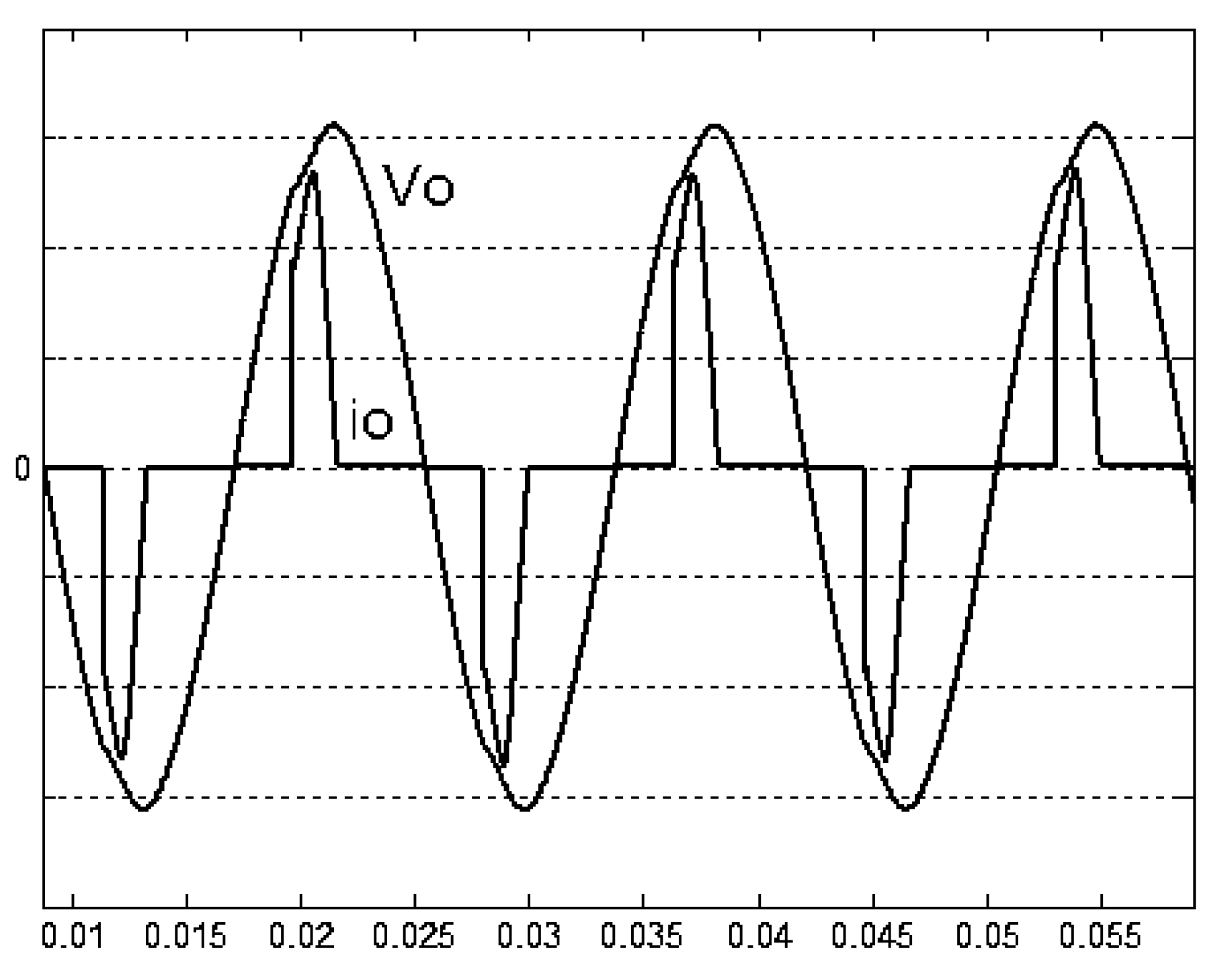
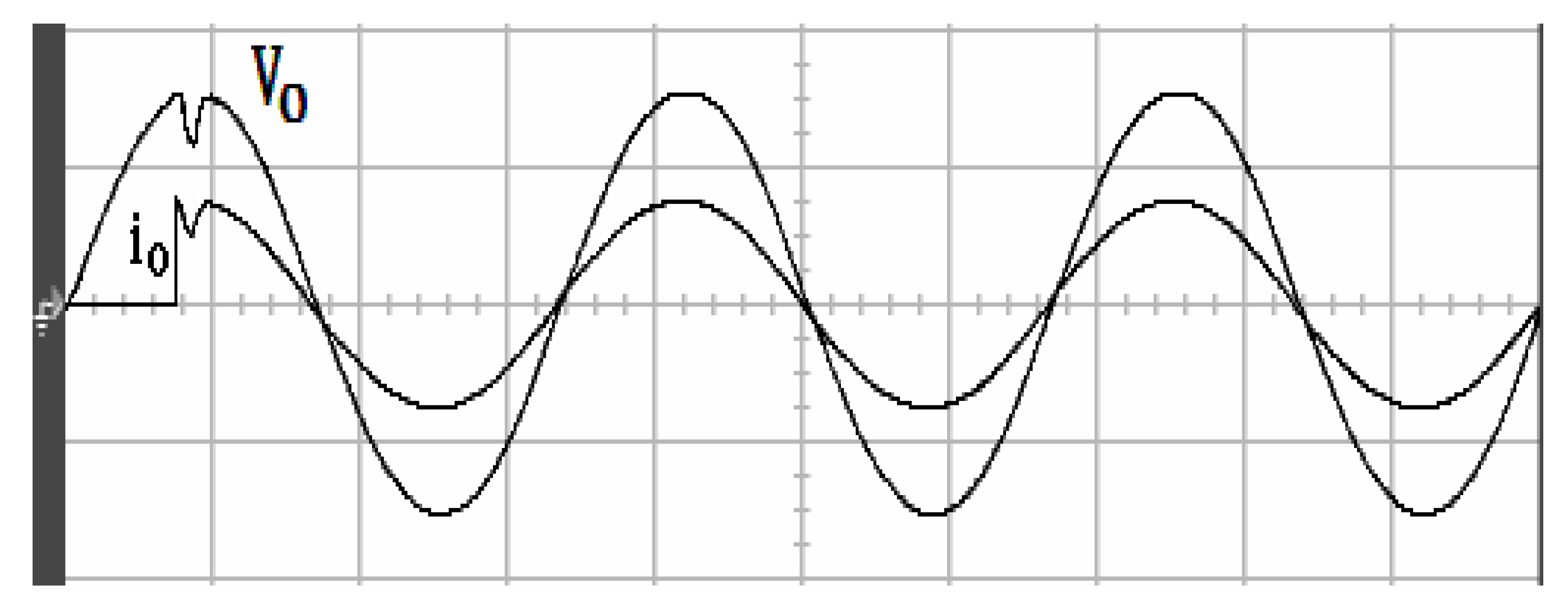
| Simulation | Rectified load %THD 18.29% |
| Experiment | Rectified load %THD 12.11% |
| Proposed solution | |
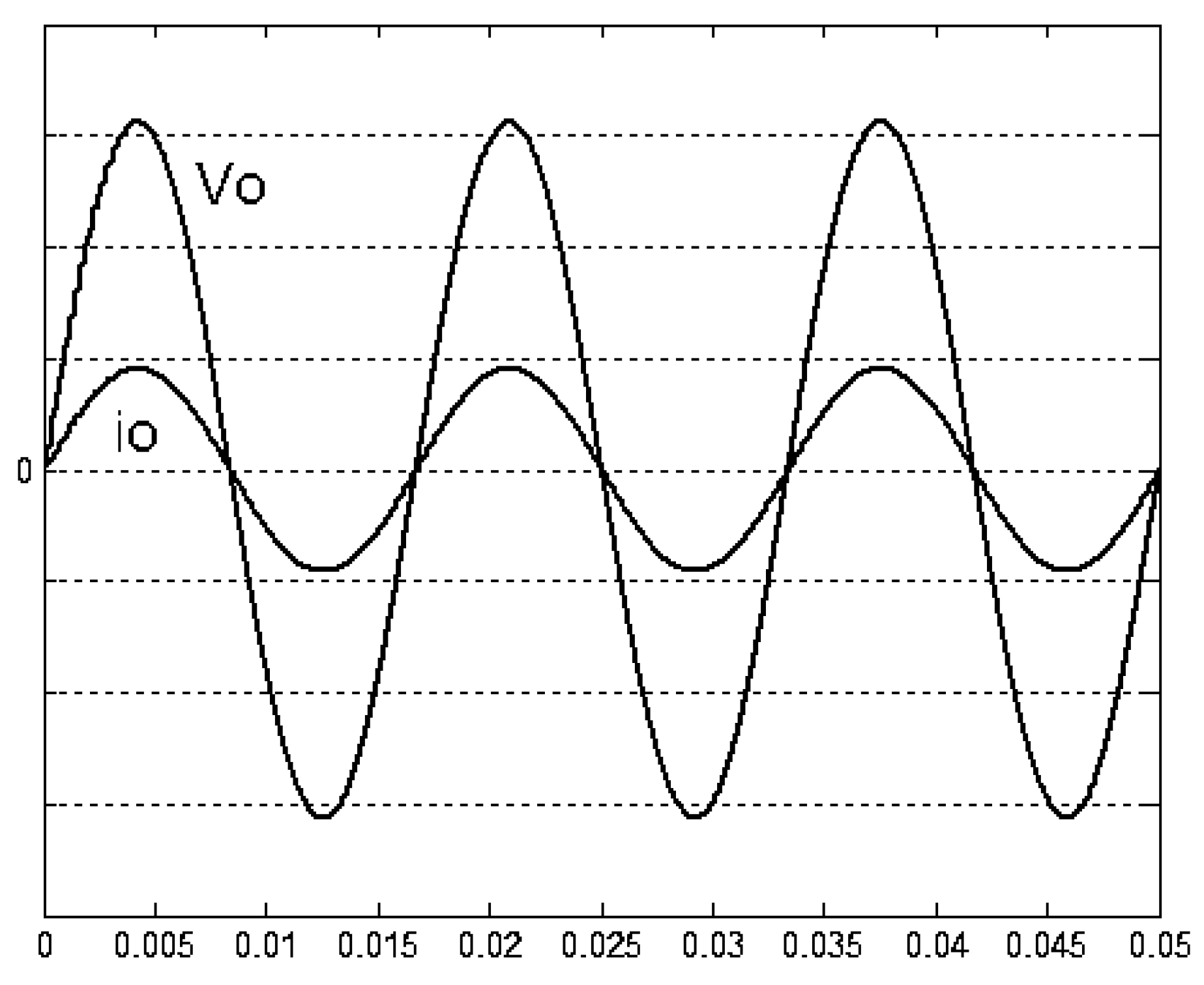
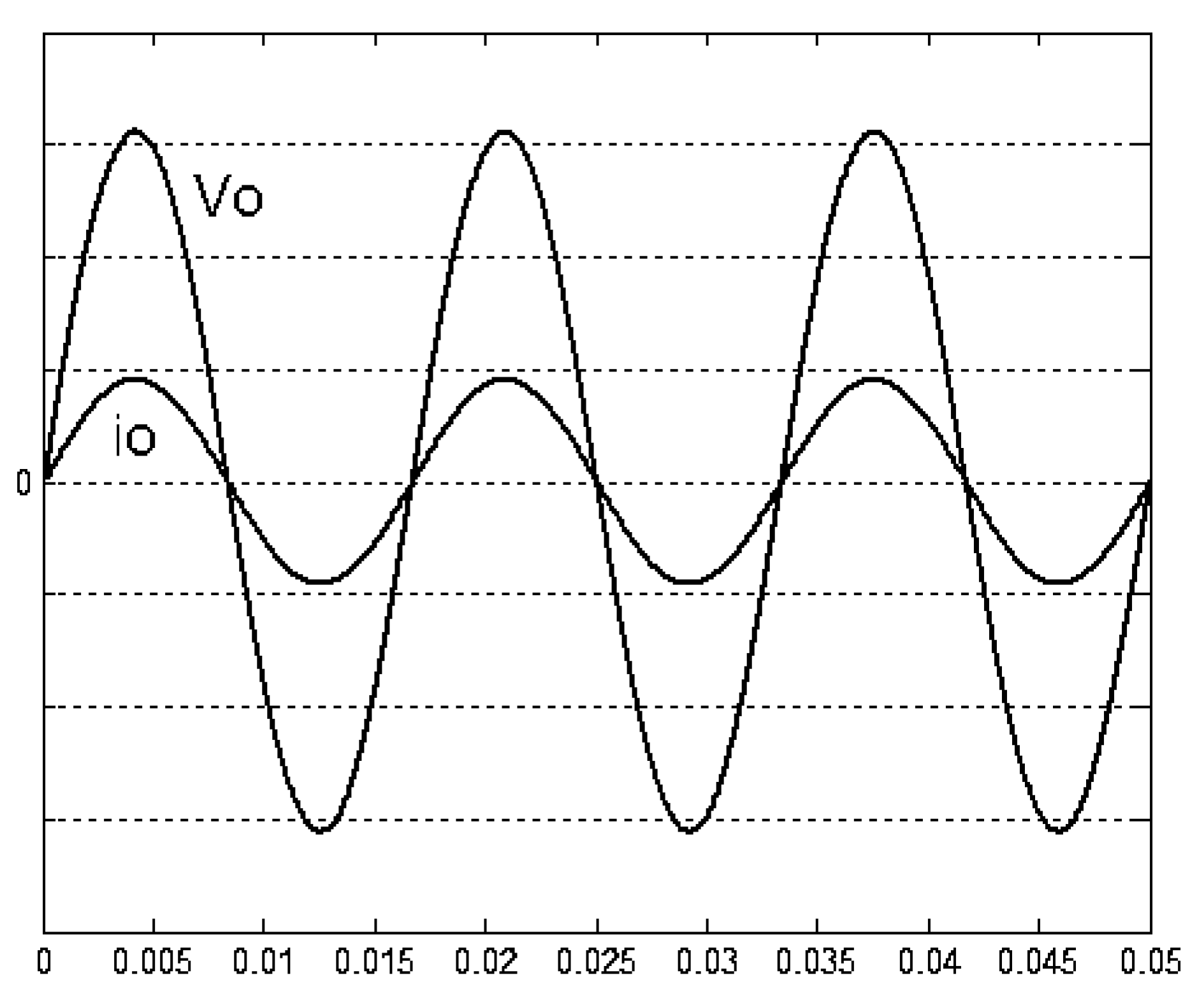
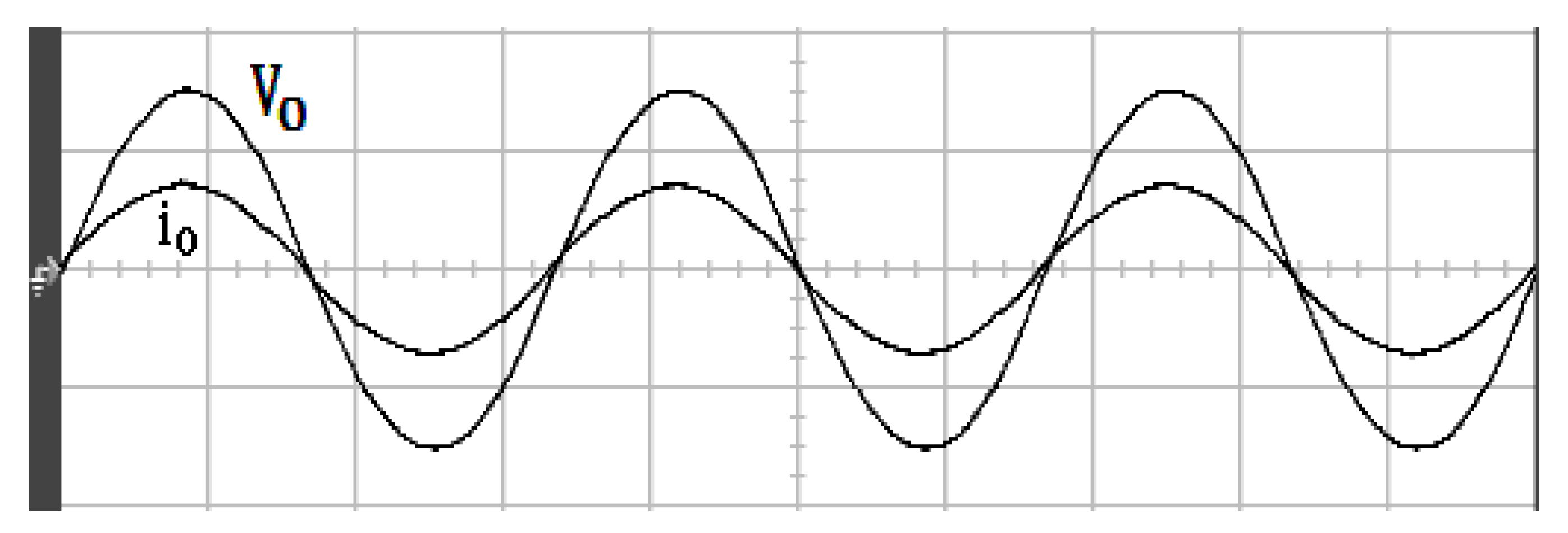
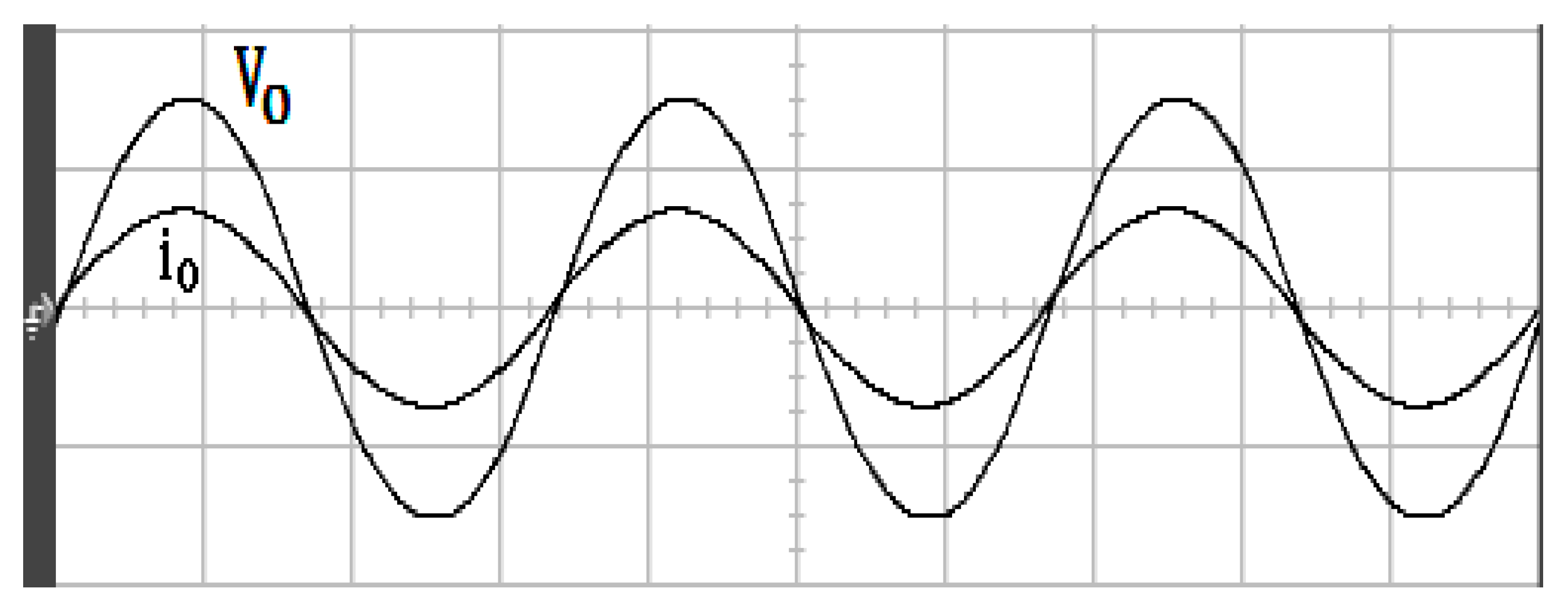
| Simulation | Rectified load %THD 0.34% |
| Experiment | Rectified load %THD 0.50% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, E.-C.; Cheng, H.-L.; Chang, C.-H.; Wu, R.-C.; Xu, H.-W.; Chen, X.-H.; Xiao, Z.-K. Optimal Quick-Response Variable Structure Control for Highly Efficient Single-Phase Sine-Wave Inverters. Processes 2021, 9, 2132. https://doi.org/10.3390/pr9122132
Chang E-C, Cheng H-L, Chang C-H, Wu R-C, Xu H-W, Chen X-H, Xiao Z-K. Optimal Quick-Response Variable Structure Control for Highly Efficient Single-Phase Sine-Wave Inverters. Processes. 2021; 9(12):2132. https://doi.org/10.3390/pr9122132
Chicago/Turabian StyleChang, En-Chih, Hung-Liang Cheng, Chien-Hsuan Chang, Rong-Ching Wu, Hong-Wei Xu, Xuan-Han Chen, and Zheng-Kai Xiao. 2021. "Optimal Quick-Response Variable Structure Control for Highly Efficient Single-Phase Sine-Wave Inverters" Processes 9, no. 12: 2132. https://doi.org/10.3390/pr9122132
APA StyleChang, E.-C., Cheng, H.-L., Chang, C.-H., Wu, R.-C., Xu, H.-W., Chen, X.-H., & Xiao, Z.-K. (2021). Optimal Quick-Response Variable Structure Control for Highly Efficient Single-Phase Sine-Wave Inverters. Processes, 9(12), 2132. https://doi.org/10.3390/pr9122132