Fault Detection and Isolation System Based on Structural Analysis of an Industrial Seawater Reverse Osmosis Desalination Plant

 ,
,  ,
,  and
and 
Abstract
1. Introduction
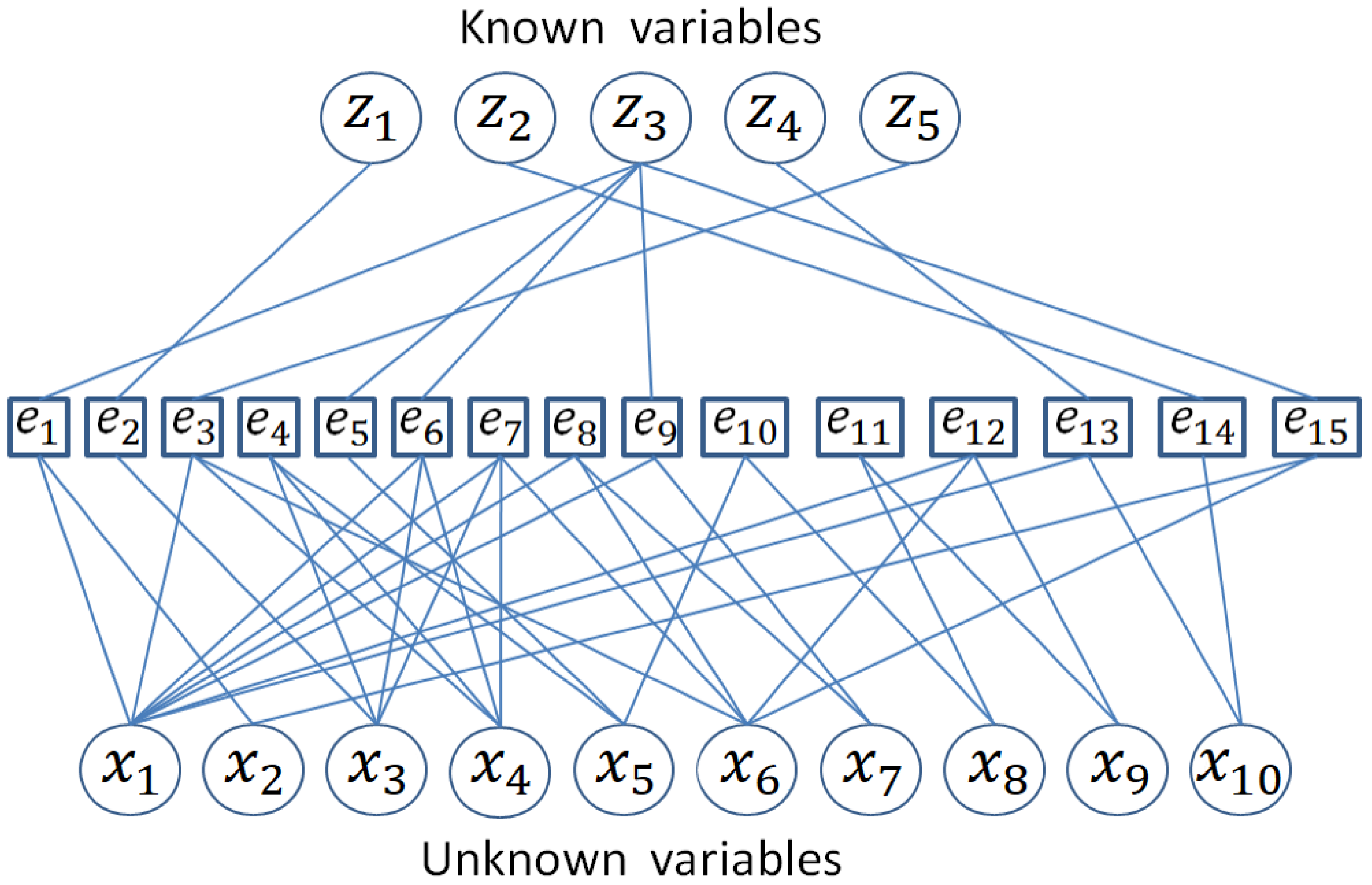
2. Structural Analysis for Model Based Diagnosis
- Overdetermined subgraph , with a X-complete matching that is not -complete,
- Just-determined subgraph , with a complete matching,
- Underdetermined subgraph , with a -complete matching that is not X-complete.
Structural Diagnosability
3. Modeling of the Seawater RO Desalination Process
3.1. Brief Description of the Industrial Seawater RO Desalination Plant
3.2. Modeling of the Seawater RO Desalination Process
4. FDI System for the RO Desalination Plant under Study
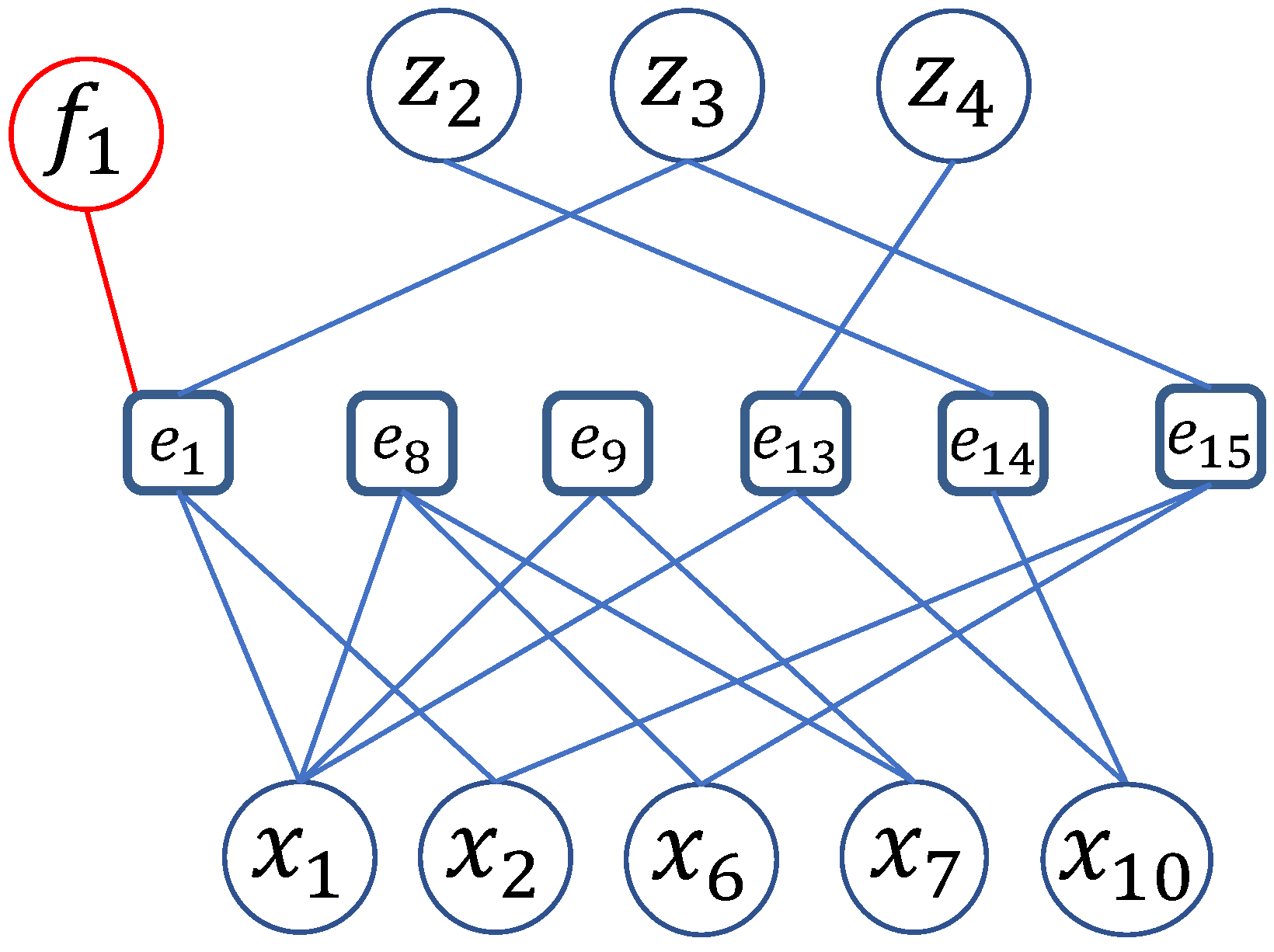
4.1. FMSO Sets’ Calculation
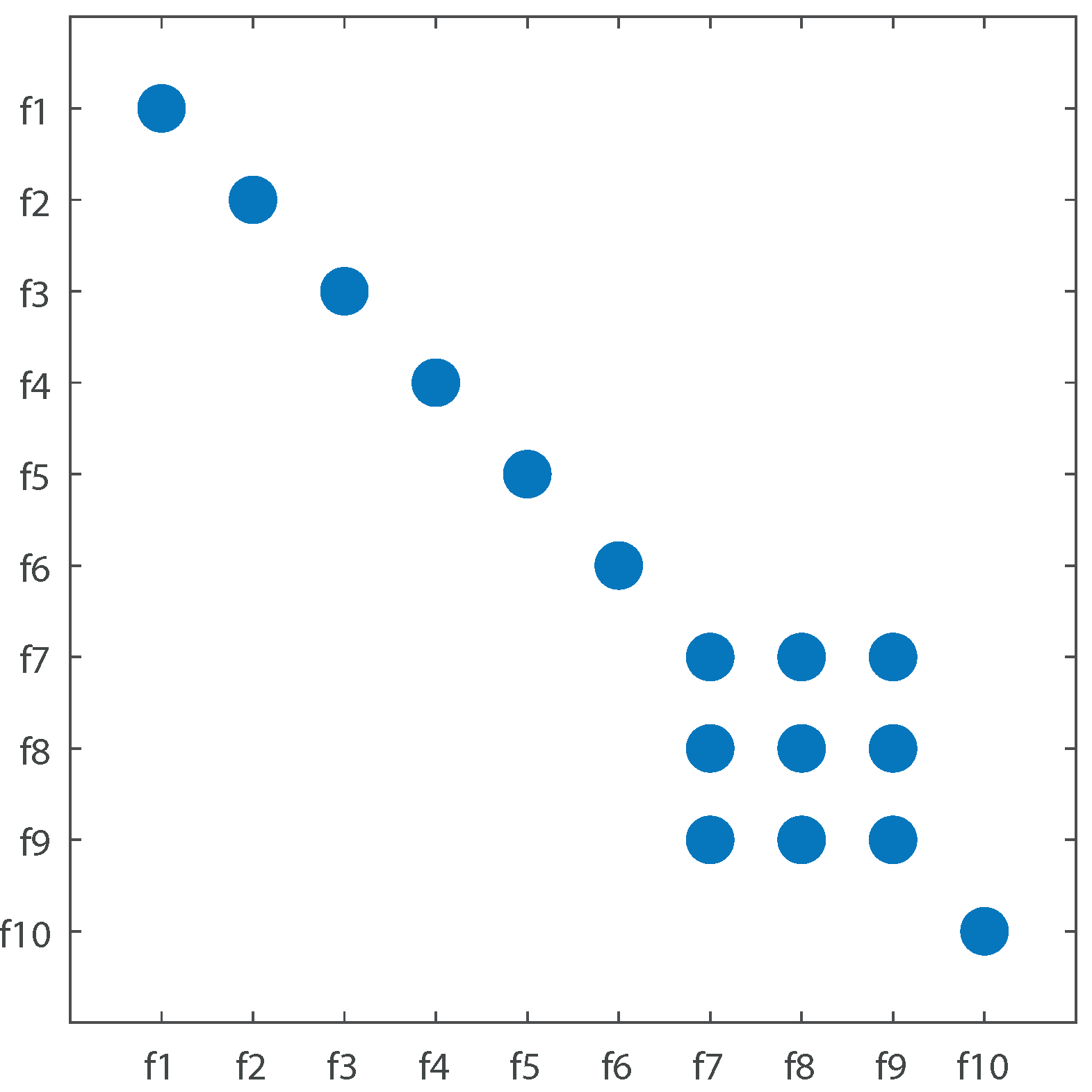
4.2. Fault Detection and Isolation
4.3. FMSO Sets’ Selection by the BILP Method
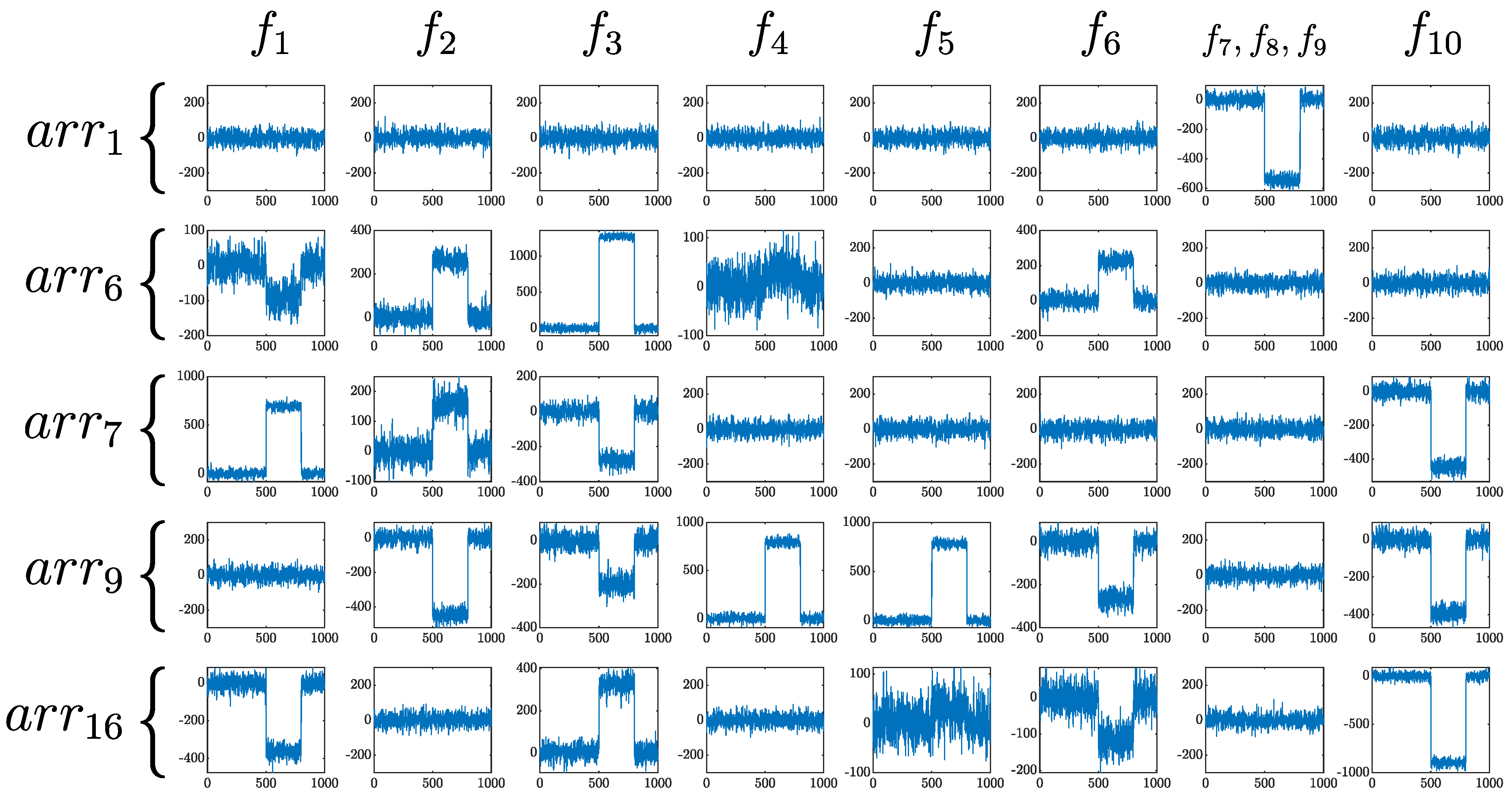
4.4. Residual Generation
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gao, L.; Yoshikawa, S.; Iseri, Y.; Fujimori, S.; Kanae, S. An economic assessment of the global potential for seawater desalination to 2050. Water 2017, 9, 763. [Google Scholar] [CrossRef]
- Ghaffour, N.; Missimer, T.M.; Amy, G.L. Technical review and evaluation of the economics of water desalination: Current and future challenges for better water supply sustainability. Desalination 2013, 309, 197–207. [Google Scholar] [CrossRef]
- Rivas-Perez, R.; Sotomayor-Moriano, J.; Pérez-Zuñiga, G.; Soto-Angles, M.A. Real-time implementation of an expert model predictive controller in a pilot-scale reverse osmosis plant for brackish and seawater desalination. Appl. Sci. 2019, 9, 2932. [Google Scholar] [CrossRef]
- Said, S.A.; Emtir, M.; Mujtaba, I.M. Flexible design and operation of multi-stage flash (MSF) desalination process subject to variable fouling and variable freshwater demand. Processes 2013, 1, 279–295. [Google Scholar] [CrossRef]
- Voutchkov, N. Desalination Engineering: Planning and Design; McGraw Hill Professional: New York, NY, USA, 2011. [Google Scholar]
- Rivas-Perez, R.; Sotomayor-Moriano, J.; Perez-Zuñiga, C.G. Adaptive expert generalized predictive multivariable control of seawater RO desalination plant for a mineral processing facility. IFAC-PapersOnLine 2017, 50, 10244–10249. [Google Scholar] [CrossRef]
- Peñate, B.; García-Rodríguez, L. Current trends and future prospects in the design of seawater reverse osmosis desalination technology. Desalination 2012, 456, 136–149. [Google Scholar] [CrossRef]
- Wang, L.K.; Chen, J.P.; Hung, Y.-T.; Shammas, N.K. Handbook of Environmental Engineering: Membrane and Desalination Technology; Humana Press: New York, NY, USA, 2011; Volume 13. [Google Scholar]
- Qasim, M.; Badrelzaman, M.; Darwish, N.N.; Darwish, N.A.; Hilal, N. Reverse osmosis desalination: A state-of-the-art review. Desalination 2019, 459, 59–104. [Google Scholar] [CrossRef]
- Kim, J.; Park, K.; Yang, D.R.; Hong, S. A comprehensive review of energy consumption of seawater reverse osmosis desalination plants. Appl. Energy 2019, 254, 113652. [Google Scholar] [CrossRef]
- Park, K.; Jungbin, K.; Yang, D.R.; Hong, S. Towards a low-energy seawater reverse osmosis desalination plant: A review and theoretical analysis for future directions. J. Membr. Sci. 2020, 595, 117607. [Google Scholar] [CrossRef]
- Greenlee, L.F.; Lawler, D.F.; Freeman, B.D.; Marrot, B.; Moulin, P. Reverse osmosis desalination: Water sources, technology, and today’s challenges. Water Res. 2009, 43, 2317–2348. [Google Scholar] [CrossRef]
- Aström, K.; Hägglund, T. Control PID Avanzado; Pearson Educación, S.A.: Madrid, Spain, 2009. [Google Scholar]
- Rodriguez Vazquez, J.R.; Rivas-Perez, R.; Sotomayor Moriano, J.J.; Peran Gonzalez, J.R. Advanced control system of the steam pressure in a fire-tube boiler. IFAC Proc. Vol. 2008, 41, 11028–11033. [Google Scholar] [CrossRef]
- Alatiqi, I.; Ettourney, H.; El-Dessouky, H. Process control in water desalination industry: An overview. Desalination 1999, 126, 15–32. [Google Scholar] [CrossRef]
- Feliu-Batlle, V.; Rivas-Perez, R.; Linares-Saez, A. Fractional order robust control of a reverse osmosis seawater desalination plant. IFAC-PapersOnLine 2017, 50, 14545–14550. [Google Scholar] [CrossRef]
- Gambier, A.; Wellenreuther, A.; Badreddin, E. Control system design of reverse osmosis plants by using advanced optimization techniques. Desalin. Water Treat. 2009, 10, 200–209. [Google Scholar] [CrossRef]
- Gambier, A.; Miksch, T.; Badreddin, E. Fault-tolerant control of a small reverse osmosis desalination plant with feed water bypass. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 3611–3616. [Google Scholar]
- Blanke, M.; Kinnaert, M.; Lunze, J.; Staroswiecki, M.; Schröder, J. Diagnosis and Fault Tolerant Control; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Vásquez, J.W.; Perez, C.G.; Muñoz, Y.A.; Ospino, A. Simultaneous occurrences and false-positives analysis in discrete event dynamic systems. J. Comput. Sci. 2020, 44, 101162. [Google Scholar] [CrossRef]
- Achbi, M.S.; Kechida, S. Methodology for monitoring and diagnosing faults of hybrid dynamic systems: A case study on a desalination plant. Diagnostyka 2020, 21, 20–33. [Google Scholar]
- Gambier, A.; Blümlein, N.; Badreddin, E. Real-time fault tolerant control of a reverse osmosis desalination plant based on a hybrid system approach. In Proceedings of the 2009 American Control Conference, St. Louis, MO, USA, 10–12 June 2009; pp. 1598–1603. [Google Scholar]
- McFall, C.W.; Christofides, P.D.; Cohen, Y.; Davis, J.F. Fault tolerant control of a reverse osmosis desalination process. In Proceedings of the 8th International IFAC Symposium on Dynamics and Control of Process Systems, Cancun, Mexico, 4–6 June 2007; Volume 3, pp. 161–166. [Google Scholar]
- Garcia-Alvarez, D.; Fuente, M.J. A UPCA based monitoring and fault detection approach for reverse osmosis desalination plants. Desalin. Water Treat. 2014, 52, 1272–1286. [Google Scholar] [CrossRef]
- Pascual, X.; Gu, H.; Bartman, A.; Zhu, A.; Rahardianto, A.; Gira, J. Fault detection and isolation in a spiral-wound reverse osmosis (RO) desalination plant. Ind. Eng. Chem. Res. 2014, 53, 3257–3271. [Google Scholar] [CrossRef]
- Pérez-Zuñiga, C.G.; Sotomayor-Moriano, J.; Chanthery, E.; Travé-Massuyès, L.; Soto, M. Flotation process fault diagnosis via structural analysis. IFAC-PapersOnLine 2019, 52, 225–230. [Google Scholar] [CrossRef]
- Pérez-Zuñiga, C.G.; Chanthery, E.; Travé-Massuyès, L.; Sotomayor, J.; Artigues, C. Decentralized diagnosis via structural analysis and integer programming. IFAC-PapersOnLine 2018, 51, 168–175. [Google Scholar] [CrossRef]
- Pérez-Zuñiga, C.G.; Chanthery, E.; Travé-Massuyès, L.; Sotomayor, J. Fault-driven structural diagnosis approach in a distributed context. IFAC-PapersOnLine 2017, 50, 14254–14259. [Google Scholar] [CrossRef]
- Isermann, R. Fault-Diagnosis Systems; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Schütze, M.; Seidel, J.; Chamorro, A.; León, C. Integrated modelling of a megacity water system—The application of a transdisciplinary approach to the Lima metropolitan area. J. Hydrol. 2019, 573, 983–993. [Google Scholar] [CrossRef]
- Sobana, S.; Panda, R.C. Review on modelling and control of desalination system using reverse osmosis. Rev. Environ. Sci. Biotechnol. 2011, 10, 139–150. [Google Scholar] [CrossRef]
- Jamal, K.; Khan, M.A.; Kamil, M. Mathematical modeling of reverse osmosis system. Desalination 2004, 160, 29–42. [Google Scholar] [CrossRef]
- Slater, C.S.; Zielinski, J.M.; Wendel, R.G.; Uchrin, C.G. Modeling of a small scale reverse osmosis systems. Desalination 1985, 52, 267–284. [Google Scholar] [CrossRef]
- Senthil, S.; Senthilmurugan, S. Reverse osmosis–pressure retarded osmosis hybrid system: Modelling, simulation and optimization. Desalination 2016, 389, 78–97. [Google Scholar]
- Sobana, S.; Panda, R.C. Modeling and control of reverse osmosis desalination process using centralized and decentralized techniques. Desalination 2014, 344, 243–251. [Google Scholar] [CrossRef]
- Pérez, C.G.; Travé-Massuyès, L.; Chanthery, E.; Sotomayor, J. Fault driven minimal structurally overdetermined set in a distributed context. In Proceedings of the 27th International Workshop on Principles of Diagnosis DX 2016, Denver, CO, USA, 4–7 October 2016. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| FMSO Set | Equations Involved |
|---|---|
| 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | |
| 1 | 1 | 1 | 1 | 0 | 1 | 0 | 0 | |
| 1 | 1 | 1 | 0 | 0 | 0 | 0 | 1 | |
| 0 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | |
| 1 | 0 | 1 | 0 | 1 | 1 | 0 | 1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pérez-Zuñiga, G.; Rivas-Perez, R.; Sotomayor-Moriano, J.; Sánchez-Zurita, V. Fault Detection and Isolation System Based on Structural Analysis of an Industrial Seawater Reverse Osmosis Desalination Plant. Processes 2020, 8, 1100. https://doi.org/10.3390/pr8091100
Pérez-Zuñiga G, Rivas-Perez R, Sotomayor-Moriano J, Sánchez-Zurita V. Fault Detection and Isolation System Based on Structural Analysis of an Industrial Seawater Reverse Osmosis Desalination Plant. Processes. 2020; 8(9):1100. https://doi.org/10.3390/pr8091100
Chicago/Turabian StylePérez-Zuñiga, Gustavo, Raul Rivas-Perez, Javier Sotomayor-Moriano, and Victor Sánchez-Zurita. 2020. "Fault Detection and Isolation System Based on Structural Analysis of an Industrial Seawater Reverse Osmosis Desalination Plant" Processes 8, no. 9: 1100. https://doi.org/10.3390/pr8091100
APA StylePérez-Zuñiga, G., Rivas-Perez, R., Sotomayor-Moriano, J., & Sánchez-Zurita, V. (2020). Fault Detection and Isolation System Based on Structural Analysis of an Industrial Seawater Reverse Osmosis Desalination Plant. Processes, 8(9), 1100. https://doi.org/10.3390/pr8091100