Model-Free Adaptive Direct Torque Control for the Speed Regulation of Asynchronous Motors


Abstract
1. Introduction
2. Problem Formulation
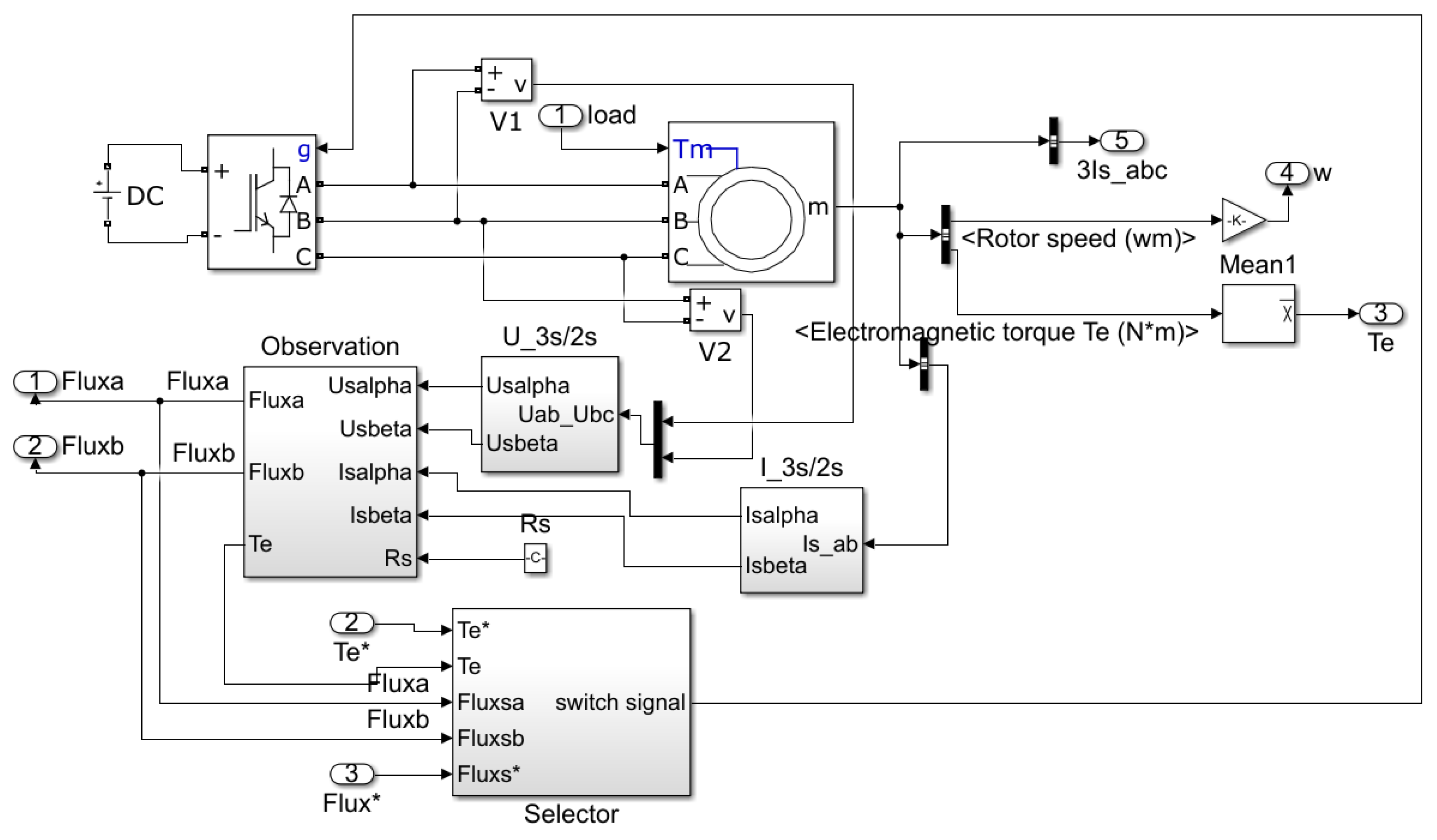
2.1. Asynchronous Motor
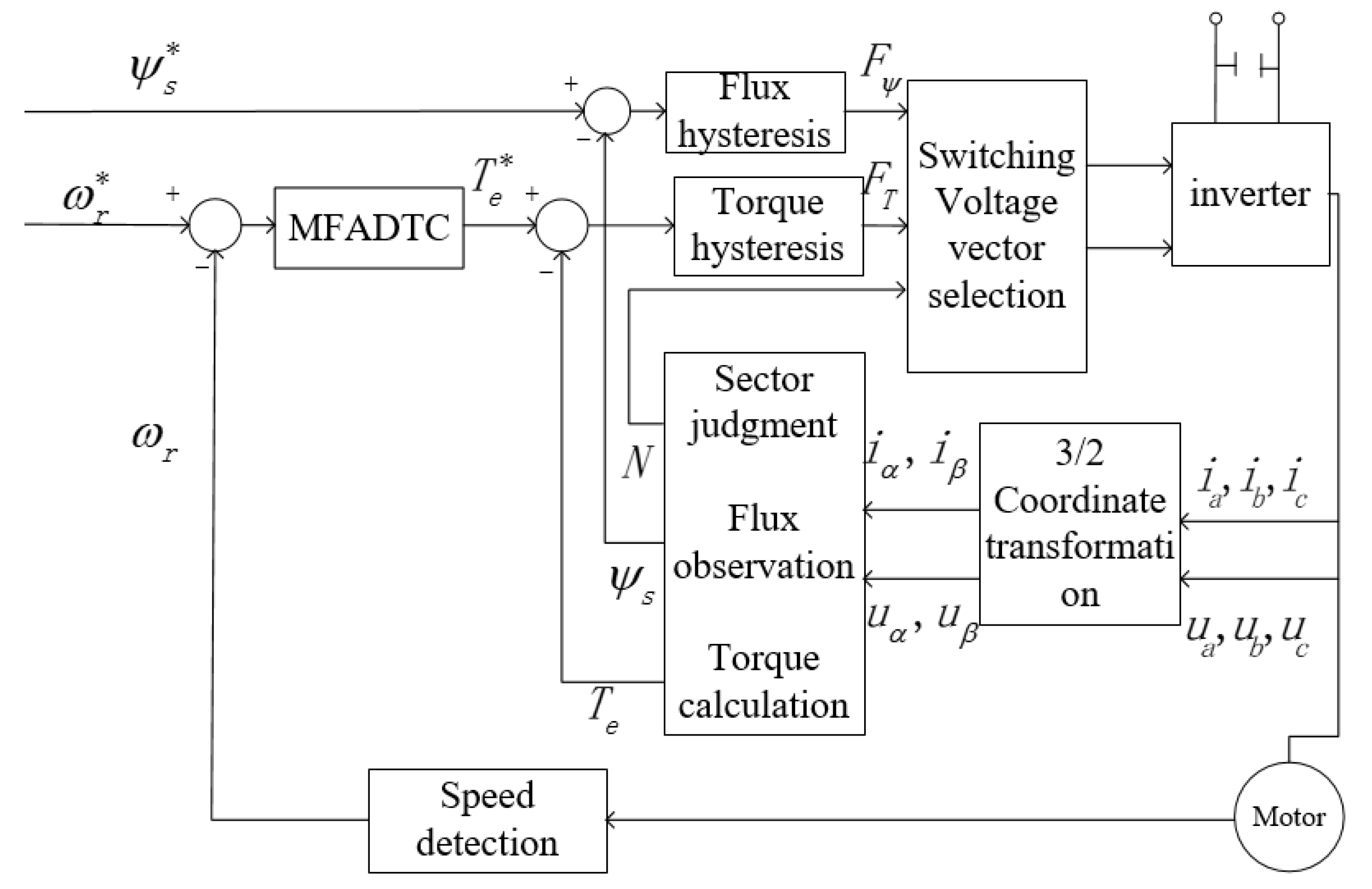
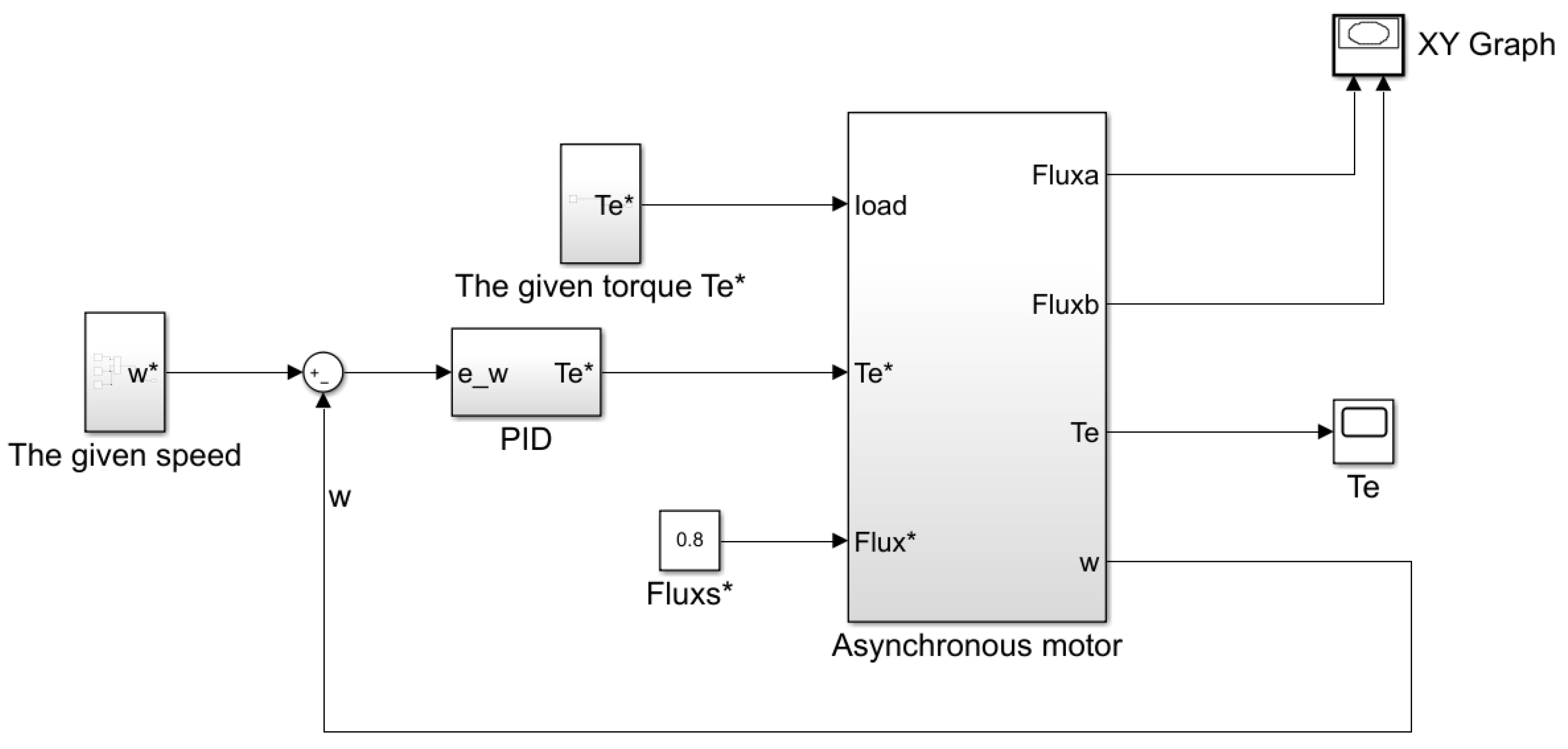
2.2. Direct Torque Control System for the Asynchronous Motor
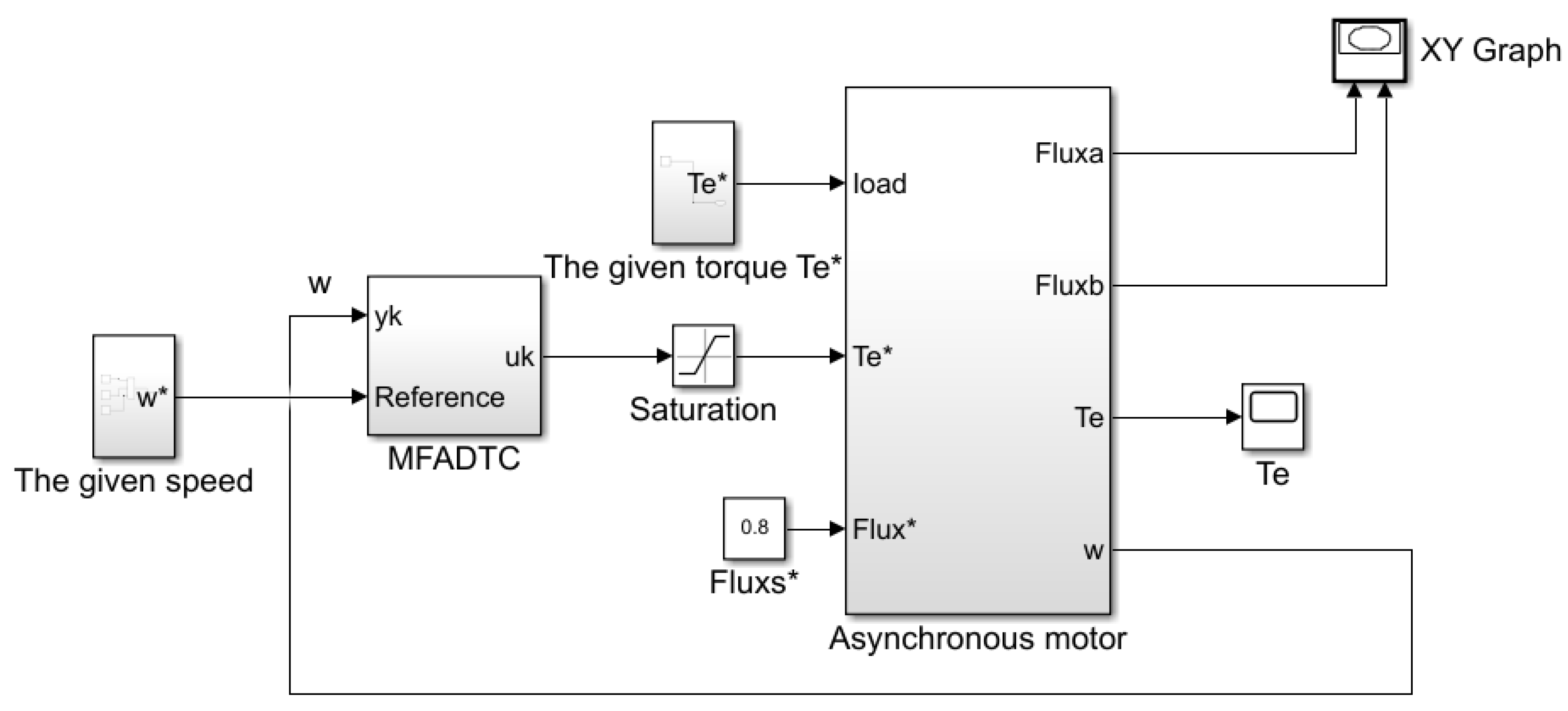
3. Model-Free Adaptive Direct Torque Control Design
3.1. Full-Format Dynamic Linearization Method
3.2. Design of Model-Free Adaptive Direct Torque Controller
3.2.1. Control Algorithm
3.2.2. Pseudo-Gradient Estimation Algorithm
4. Simulation Studies
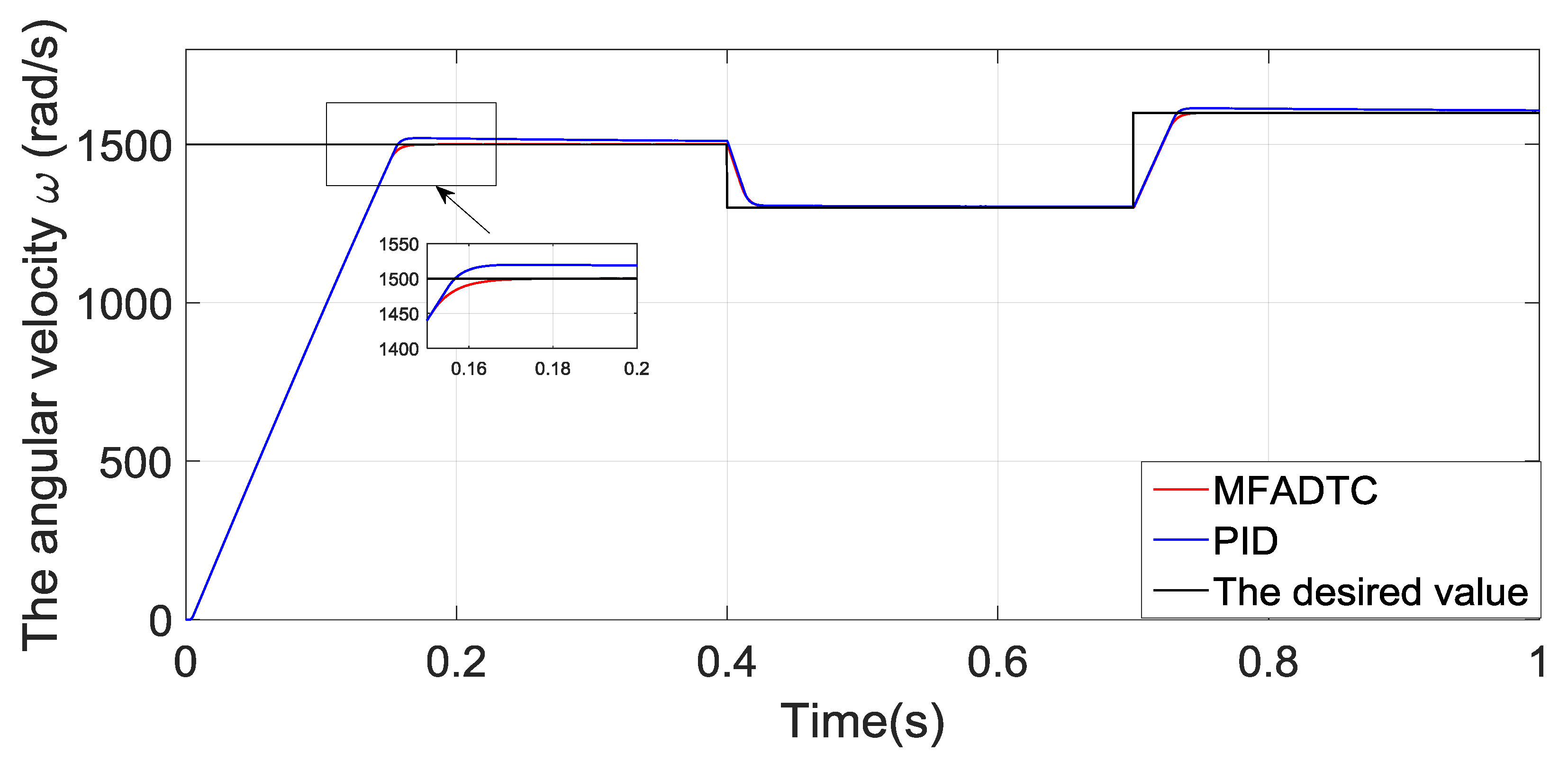
4.1. Simulation Result without Disturbance
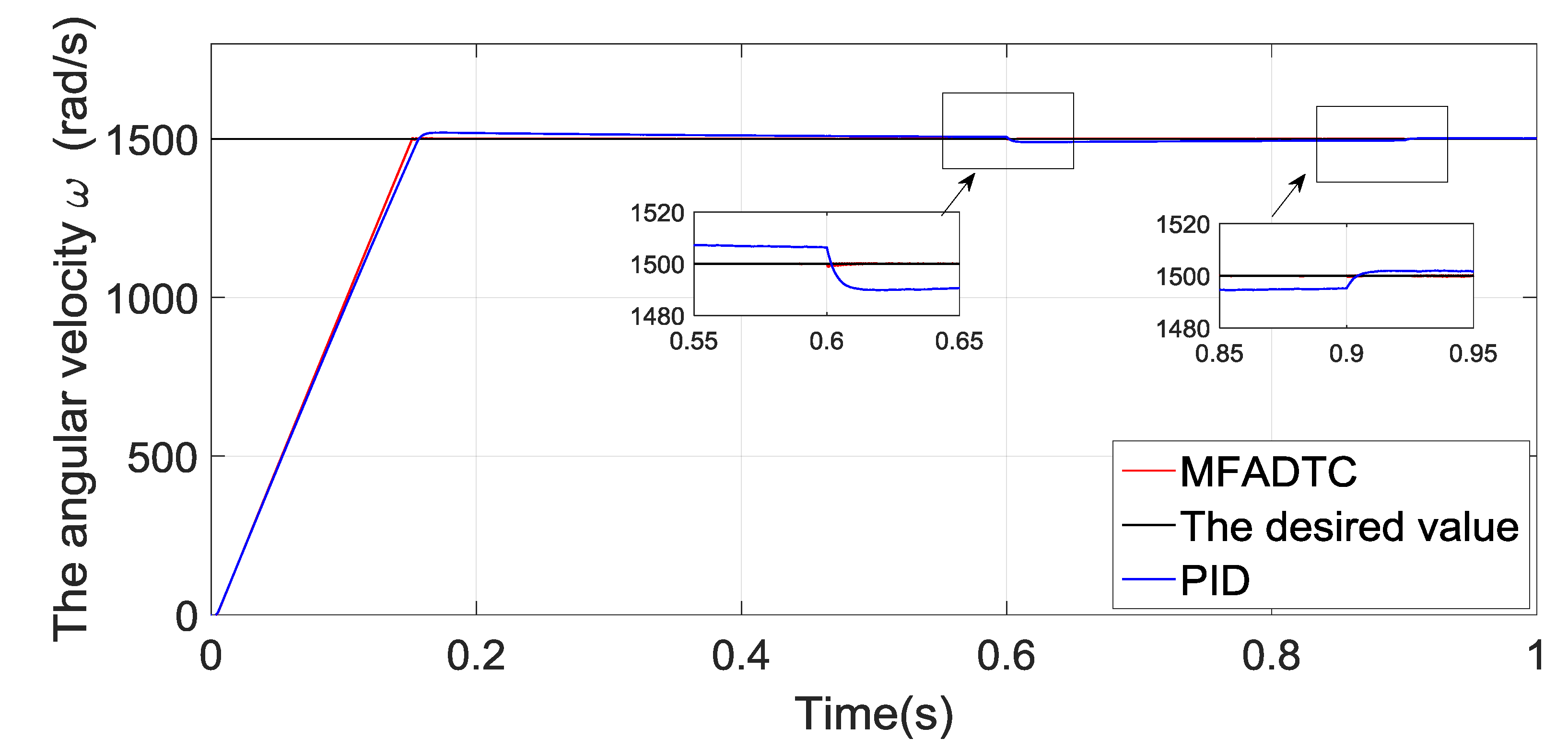
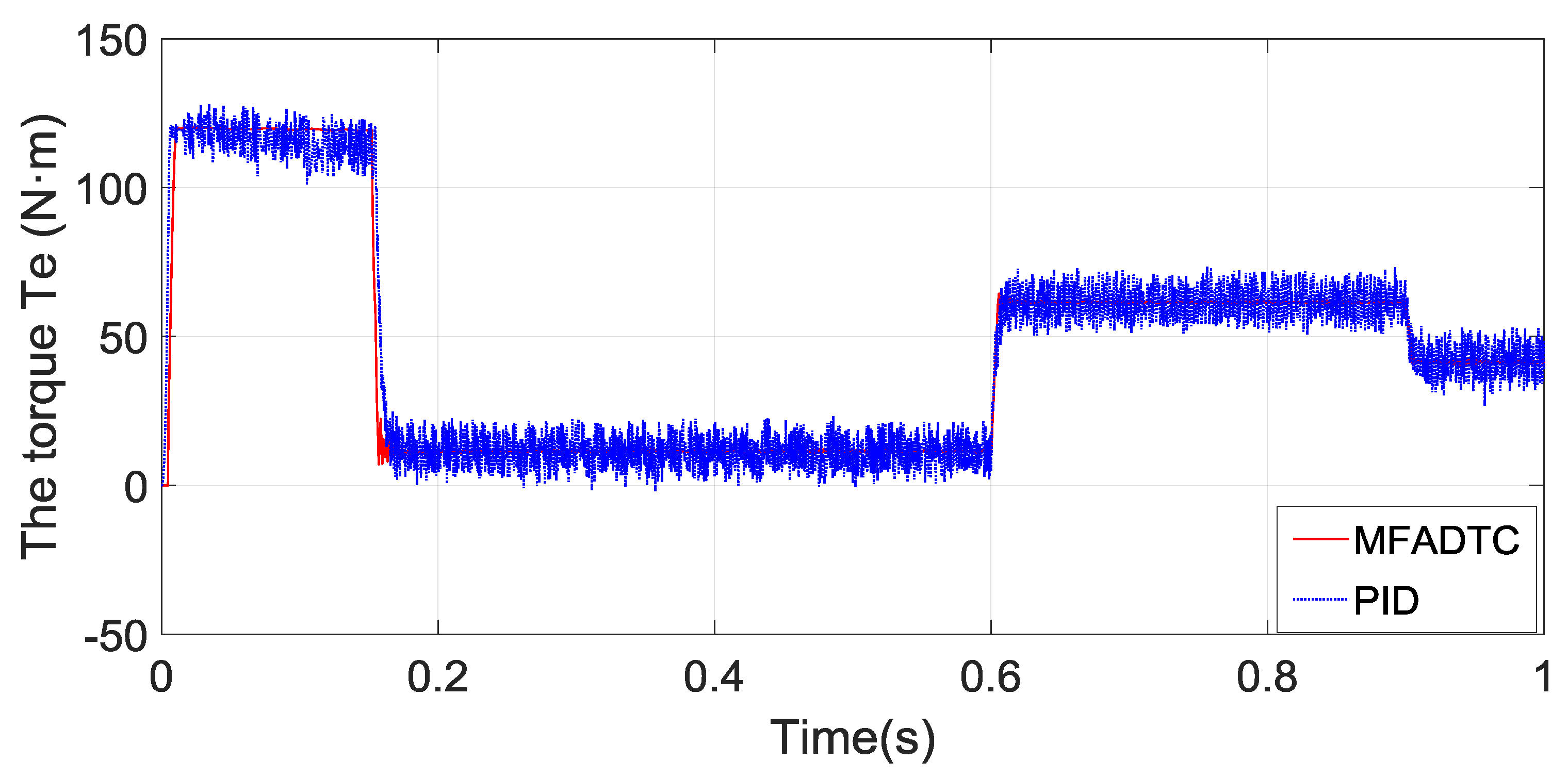
4.2. Simulation Result with Disturbance
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Xin, X.N. Direct Torque Control and Vector Control of Three-phase Asynchronous Motors. In Proceedings of the 2018 International Conference on Power, Energy and Environmental Engineering, Wuhan, China, 7 February 2018; Volume 1, pp. 100–105. [Google Scholar]
- Li, J.H. Research on Direct Torque Control without Speed Sensor Based on MRAS. Electron. World 2013, 13, 88–89. [Google Scholar]
- Hu, J.; Dawson, D.M. Adaptive Control of Induction Motor Systems despite Rotor Resistance Uncertainty. Automatica 1996, 32, 1127–1143. [Google Scholar] [CrossRef]
- Açikgöz, H.; Yıldız, C.; Kale, G.; Kececio, F. Speed Control of Induction Motor Based on Model Reference Adaptive Control. In Proceedings of the 2015 9th International Conference on Electrical and Electronics Engineering (ELECO), Bursa, Turkey, 26–28 November 2015; pp. 654–659. [Google Scholar]
- Xu, J.; Hu, Z.J.; Tian, G.Q. Model Reference Adaptive Vector Control of Asynchronous Motor without Speed Sensor. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; pp. 3195–3199. [Google Scholar]
- Lang, F.C.; Lin, Y. Design of Fuzzy PI Controller for Asynchronous Motor Direct Torque. In Proceedings of the Chinese Control and Decision Conference (CCDC), Liaoning, China, 9 June 2018; Volume 1, pp. 1116–1119. [Google Scholar]
- Liao, Y.H.; Feng, X.Y.; Wang, Z. Space Vector Modulation Direct Torque Control of Asynchronous Motor Based on Stator Flux Sliding-mode Observer. Proc. CSEE 2012, 32, 88–97. [Google Scholar]
- Li, Y. On Speed Regulation System of Asynchronous Motor Based on Tornambe Control. Master’s Thesis, North University of China, Taiyuan, China, 2018. [Google Scholar]
- Hou, Z.S.; Jin, S.T. Model Free Adaptive Control: Theory and Applications; CRC Press: Beijing, China, 2013. [Google Scholar]
- Zhang, X.F.; Ma, H.B. Data-Driven Model-Free Adaptive Control Based on Error Minimized Regularized Online Sequential Extreme Learning Machine. Energies 2019, 12, 3241. [Google Scholar] [CrossRef]
- Wang, T.; Lai, H.; Gao, X. Modeling of Submersible Motor and Application of Model-free Adaptive Control. Control Eng. 2015, 22, 835–840. [Google Scholar]
- Guo, J.; Bao, W.; Yin, B. Simulation Study of Model-free Control Method in Asynchronous Motor Control. World Invert. 2012, 77–79. [Google Scholar]
- Zeng, Z.Q.; Cao, R.M.; Hou, Z.S. MIMO Model-Free Adaptive Contour Control for Two-dimensional Linear Motor. Control Theory Appl. 2019. [Google Scholar] [CrossRef]
- Song, D.L.; Lu, N. Simulation of Model-free Adaptive Control Algorithm in ROV Depth Determination Control. Ship Eng. 2019, 41, 87–92+103. [Google Scholar]
- Yu, W.; Bu, X.H. Design of Model-free Adaptive Anti-interference Attitude Controller for Quadrotor. J. Electron. Meas. Instrum. 2019, 33, 166–172. [Google Scholar]
- Zhang, X. Robustness of Model-Free Adaptive Control and Application in Four-rotor Aircraft. Master’s Thesis, Beijing Jiaotong University, Beijing, China, 2019. [Google Scholar]
- Hu, Y.; Jiang, F.C. Distributed Electric Vehicle Drive System MFAC Active Fault Tolerant Control. Automot. Eng. 2019, 41, 983–989+1005. [Google Scholar]
- Luo, Y.Y.; Chen, R.; Hu, Y. Distributed Electric Vehicle Steering System by Wire MFAC Active Fault Tolerant Control. Chin. J. Mech. Eng. 2019, 55, 131–139. [Google Scholar]
- Zhu, M.S.; Liu, J.M. Study on Model-free Adaptive Control of Boiler Water Circulation System. J. Chongqing Univ. Technol. 2019, 33, 214–220. [Google Scholar]
- Duan, J.M.; Ma, X.J.; Liu, X. A path Tracking Method Based on MFAPC for Driverless Vehicles. Comput. Eng. 2019, 45, 6–11+20. [Google Scholar]
- Lu, D. Application of Model-free Adaptive Control Method in Image Recognition. Master’s Thesis, Beijing Jiaotong University, Beijing, China, 2019. [Google Scholar]
- Zhang, S.; Zhou, P. Recursive Bilinear Subspace Modeling and Model-free Adaptive Control for Wastewater Treatment Process. Acta Automatica Sinica. 2019. [Google Scholar] [CrossRef]
- Hao, Y.; Bu, S.J. Design of Induction Motor Direct Torque Control Frequency Conversion Speed Regulation System. Autom. Instrum. 2015, 10, 30–32. [Google Scholar]
- Hou, Z.S.; Xiong, S.S. On Model-Free Adaptive Control and Its Stability Analysis. IEEE Trans. Autom. Control 2019, 64, 4555–4569. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | MSE-PID | MSE-MFADTC |
|---|---|---|
| Speed | 123376 | 122871 |
| Index | MSE-PID | MSE-MFADTC |
|---|---|---|
| Speed | 122126 | 119977 |
| Torque | 1751 | 1692 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Jin, S.; Liu, G.; Hou, Z.; Zheng, J. Model-Free Adaptive Direct Torque Control for the Speed Regulation of Asynchronous Motors. Processes 2020, 8, 333. https://doi.org/10.3390/pr8030333
Zhang Z, Jin S, Liu G, Hou Z, Zheng J. Model-Free Adaptive Direct Torque Control for the Speed Regulation of Asynchronous Motors. Processes. 2020; 8(3):333. https://doi.org/10.3390/pr8030333
Chicago/Turabian StyleZhang, Ziwei, Shangtai Jin, Genfeng Liu, Zhongsheng Hou, and Jianmin Zheng. 2020. "Model-Free Adaptive Direct Torque Control for the Speed Regulation of Asynchronous Motors" Processes 8, no. 3: 333. https://doi.org/10.3390/pr8030333
APA StyleZhang, Z., Jin, S., Liu, G., Hou, Z., & Zheng, J. (2020). Model-Free Adaptive Direct Torque Control for the Speed Regulation of Asynchronous Motors. Processes, 8(3), 333. https://doi.org/10.3390/pr8030333