Design and Verification of a Single-Channel Pump Model based on a Hybrid Optimization Technique





Abstract
1. Introduction
2. Numerical Methods
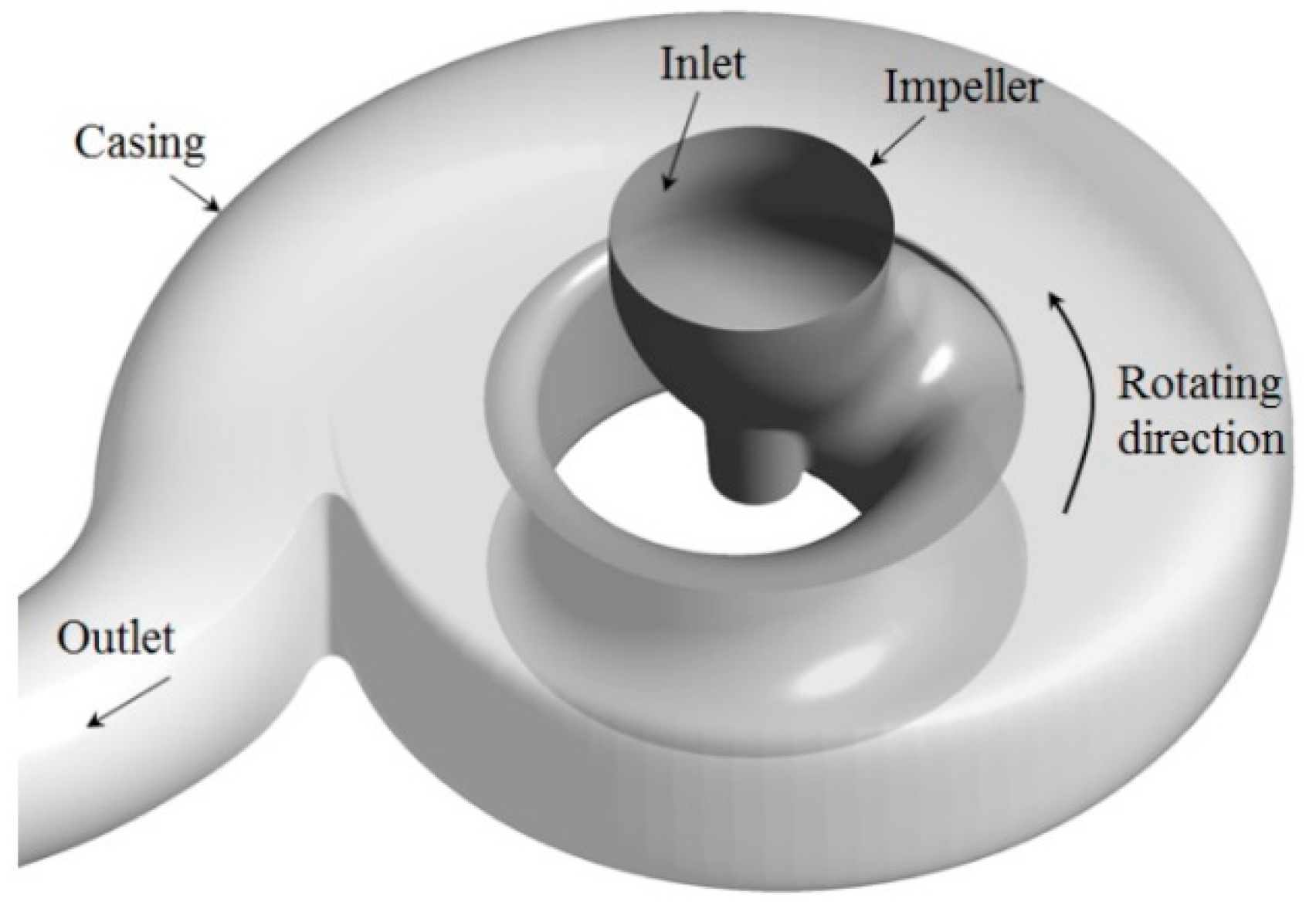
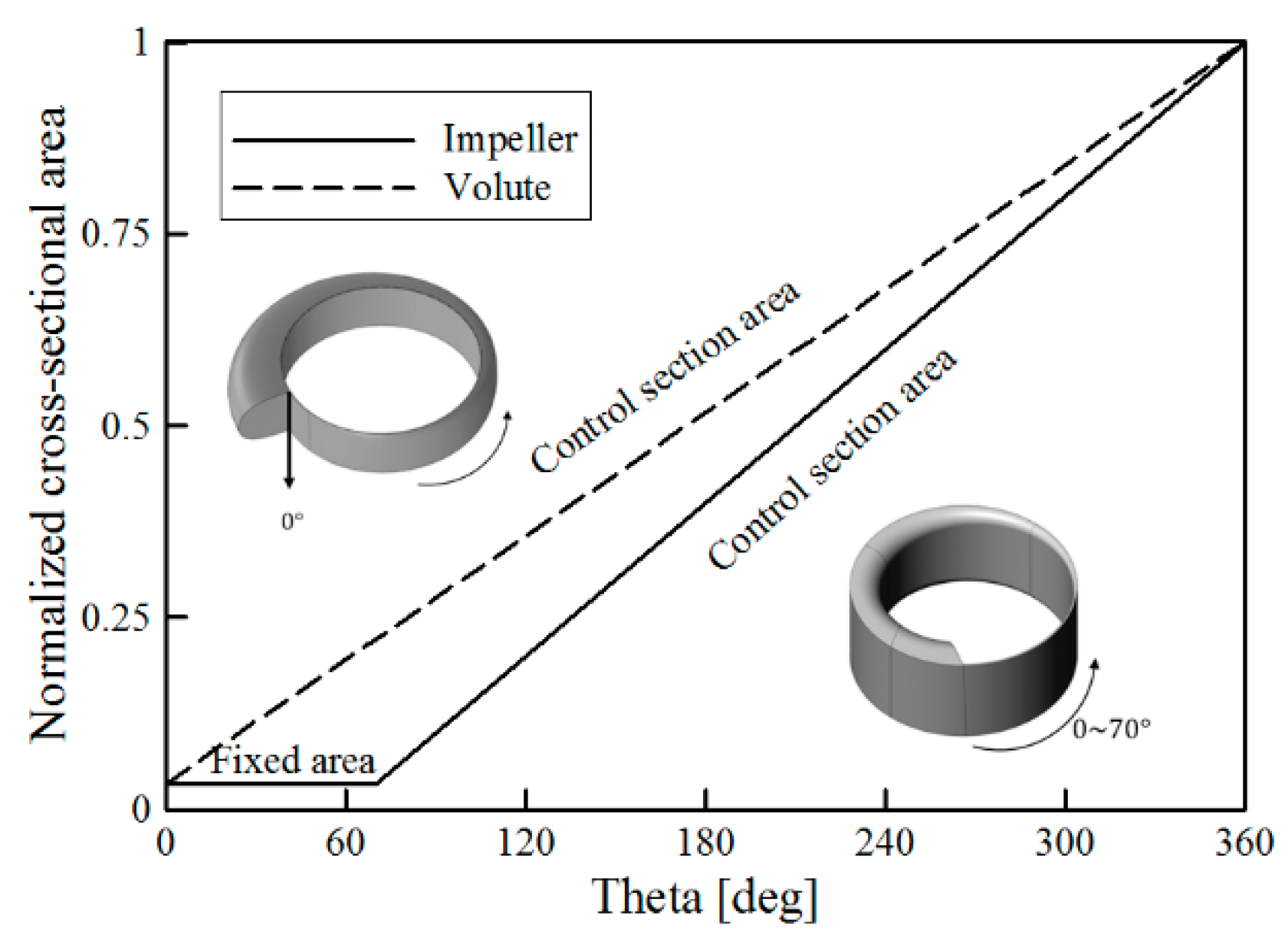
2.1. Single-Channel Pump Model
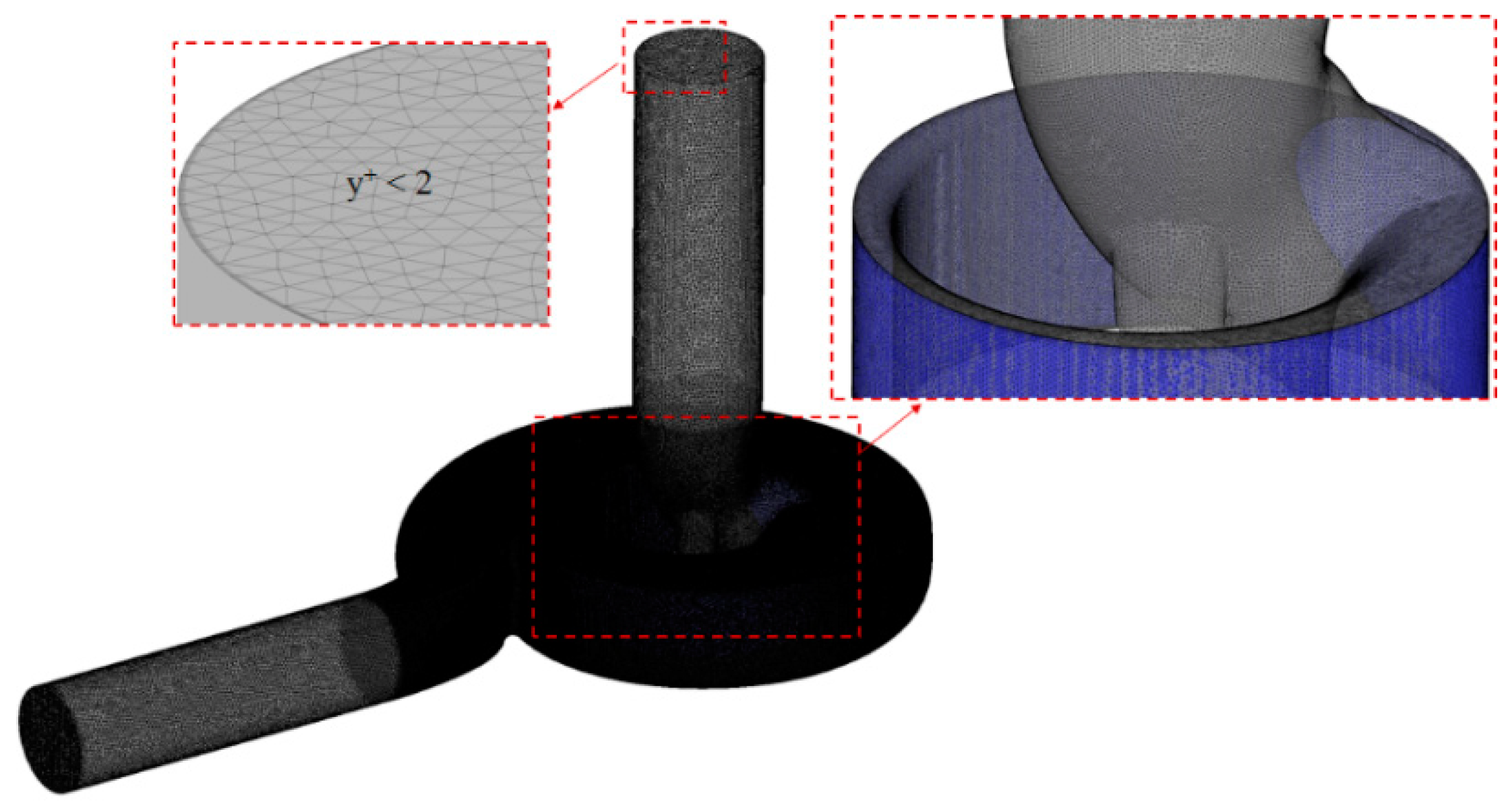
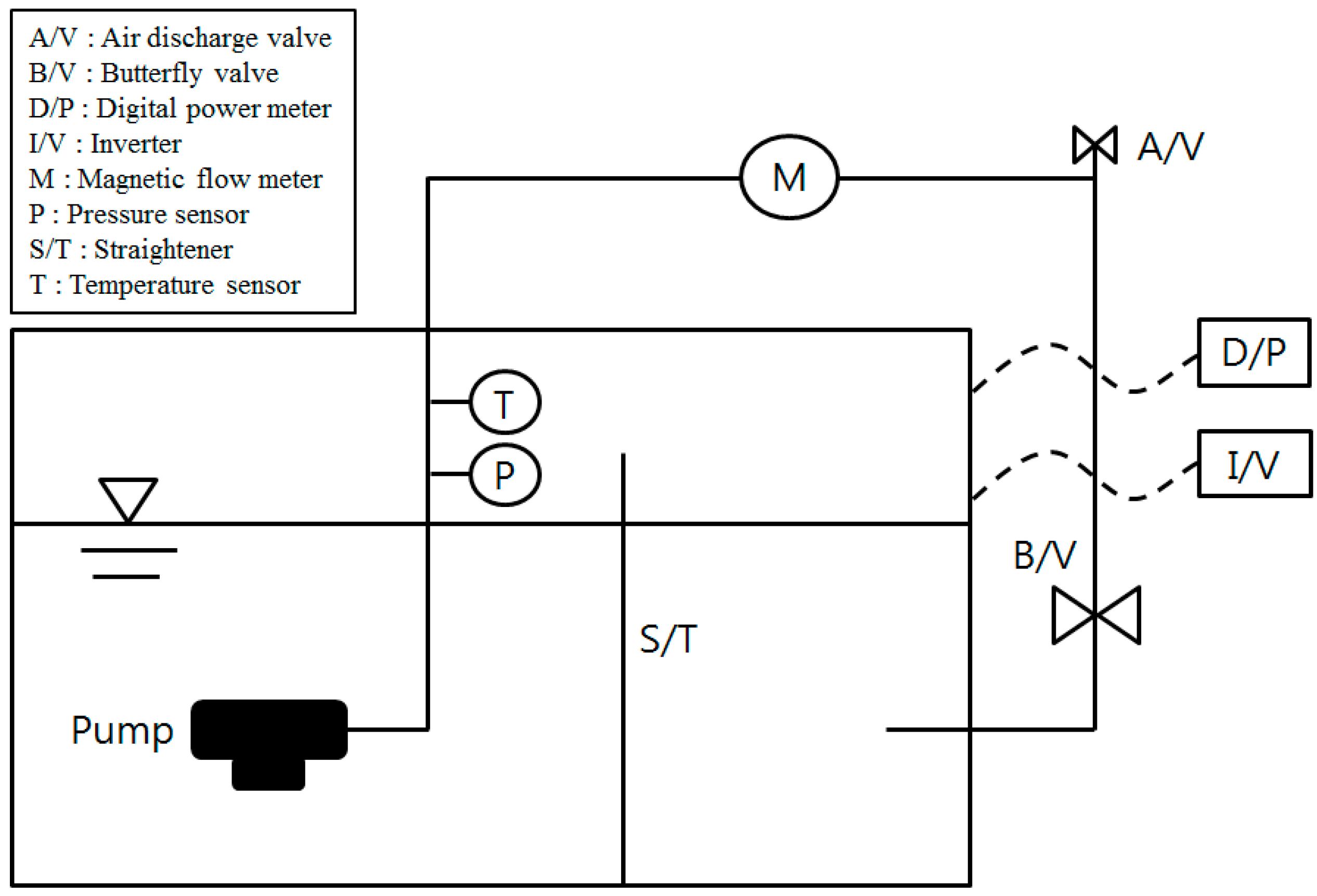
2.2. Numerical Analysis
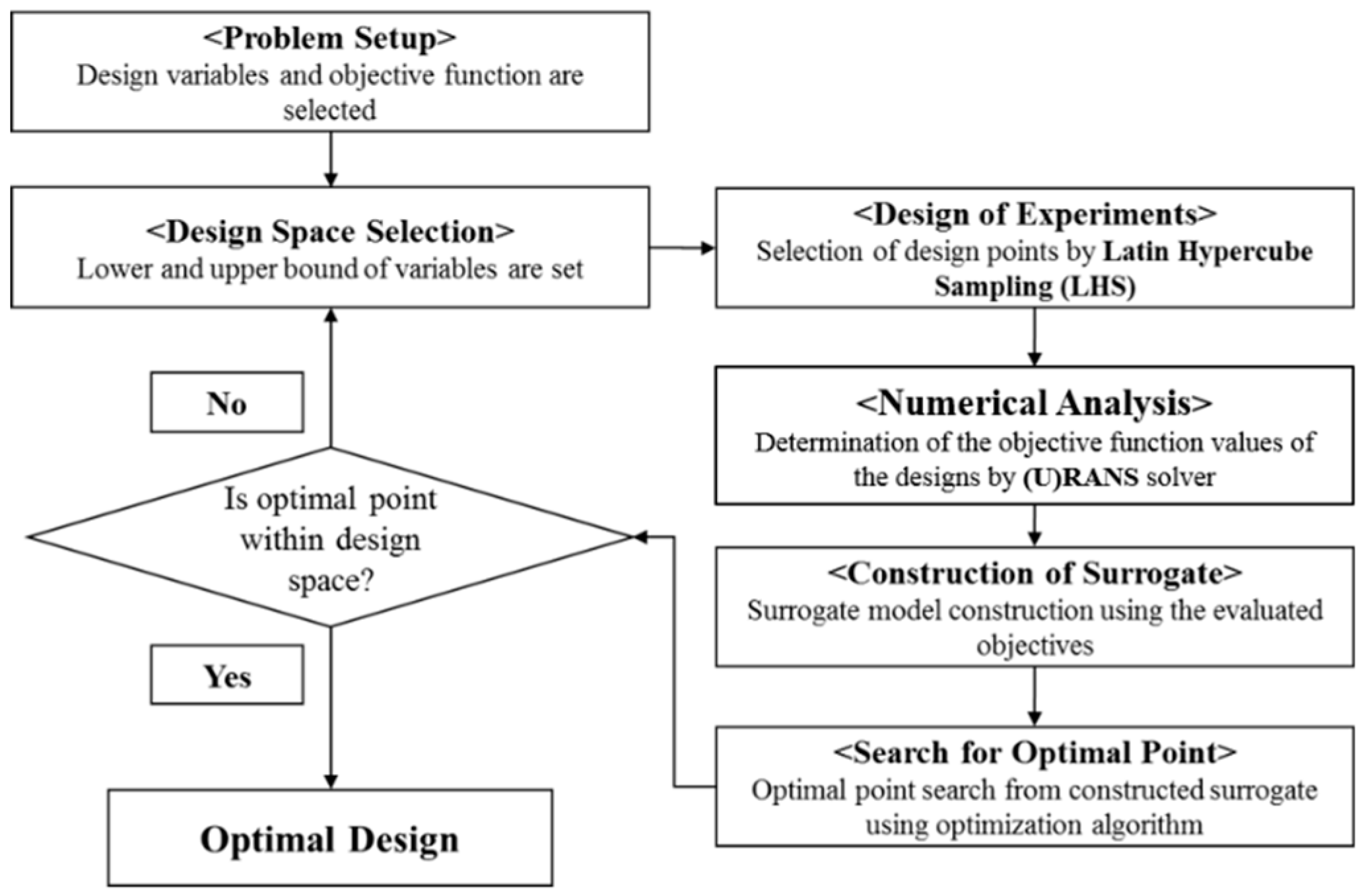
3. Optimization Techniques
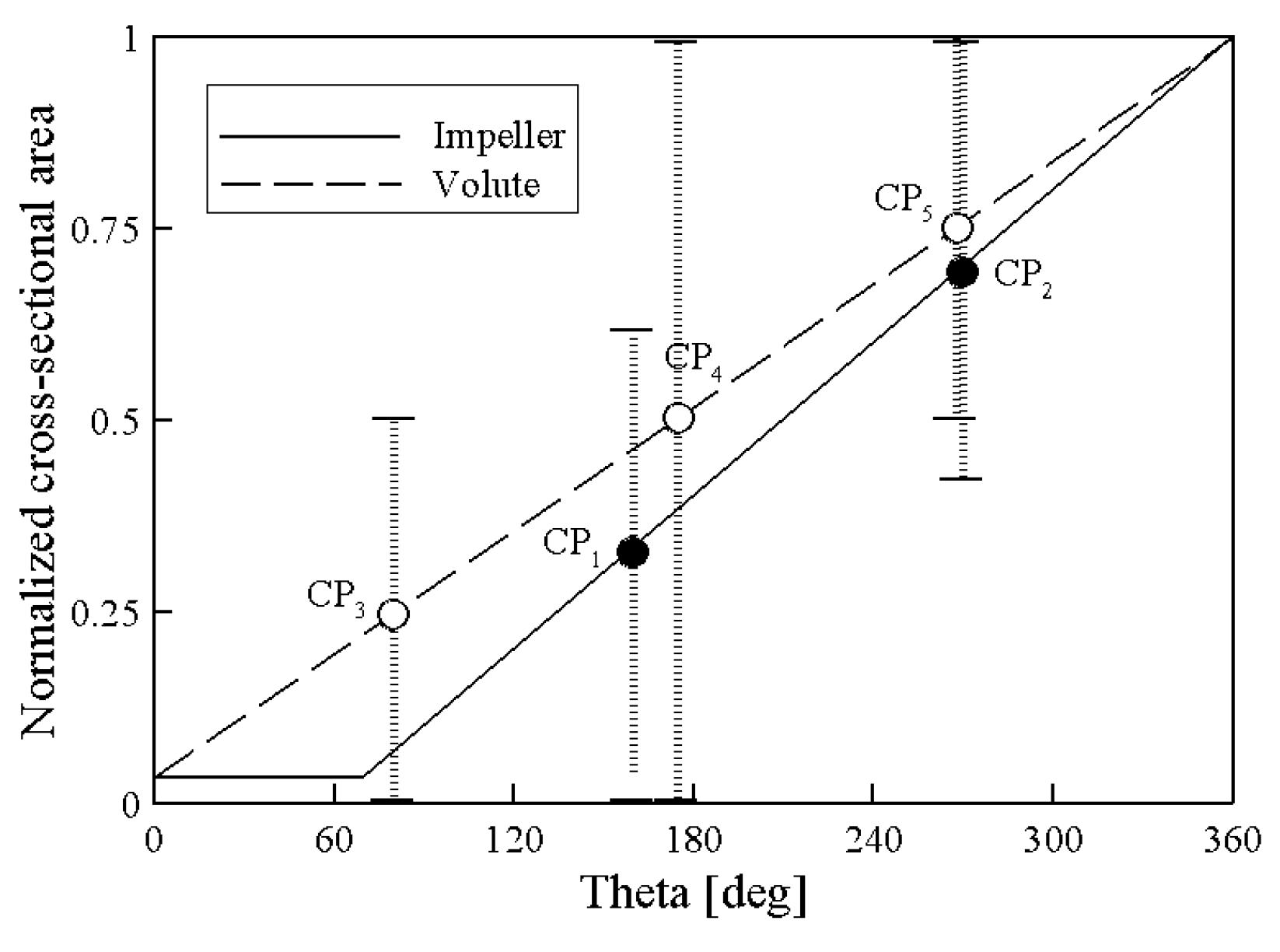
3.1. Optimization Goal
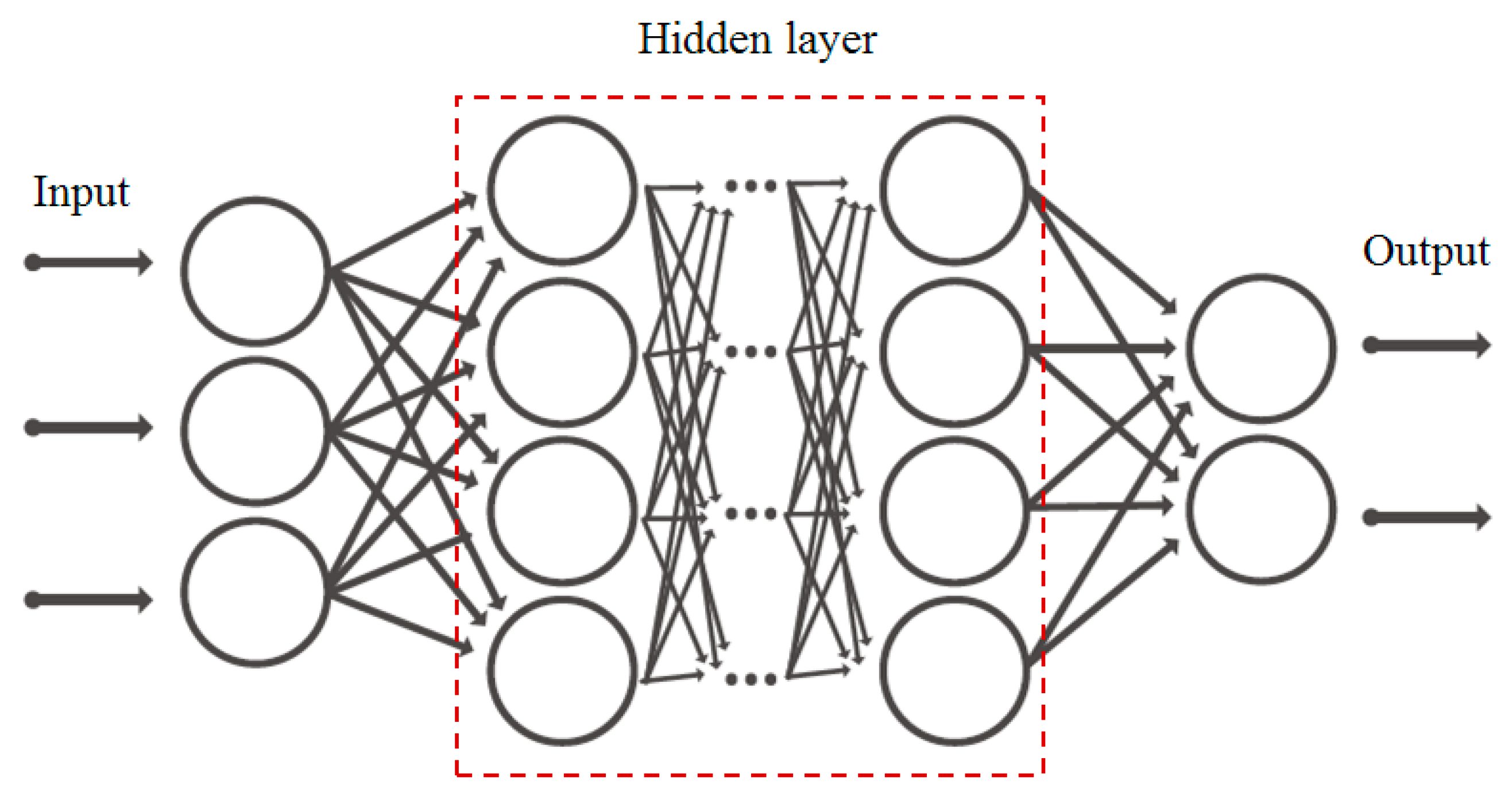
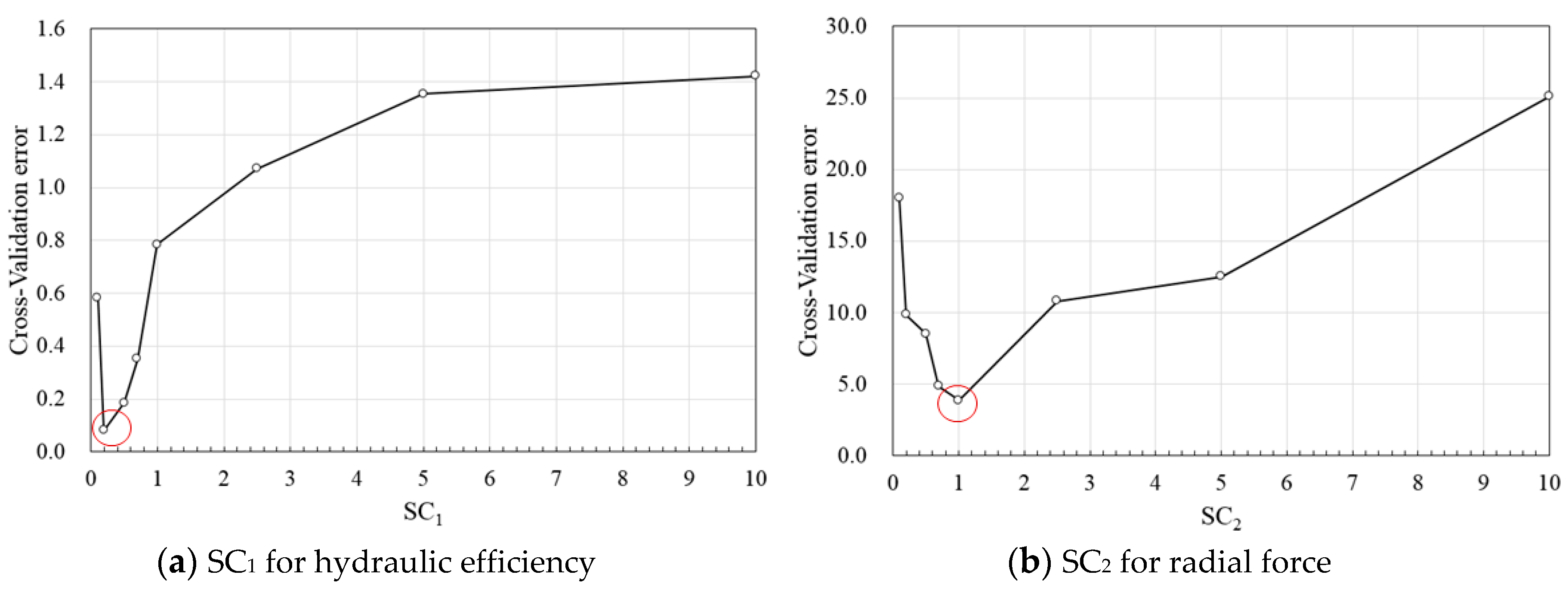
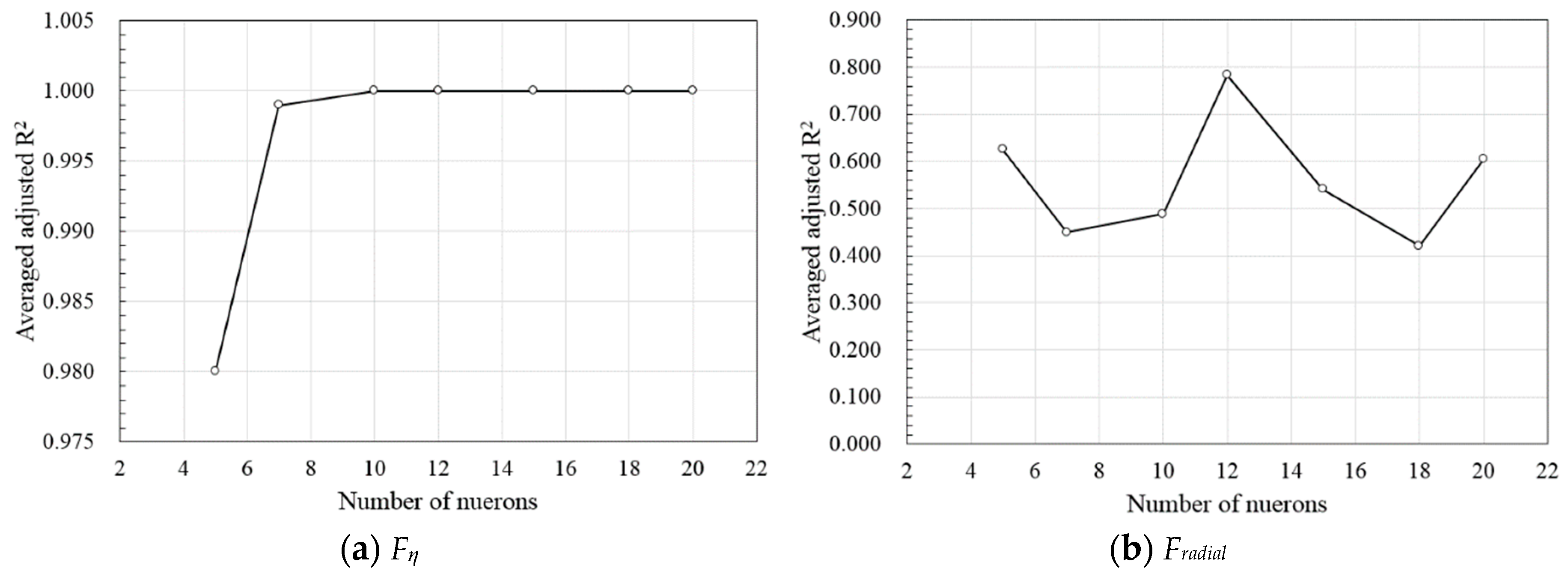
3.2. Surrogate Modeling
- Step 1
- Construct a surrogate model using the 53 experimental points, except for one point of the 54 experimental points.
- Step 2
- Compare the value of the objective function at the location of the experimental point excluded from Step 1 (between CFD simulation value and predicted value by the surrogate model).
- Step 3
- This process is carried out at all experimental points. Then, evaluate the sum of the errors between predicted and CFD simulation values.
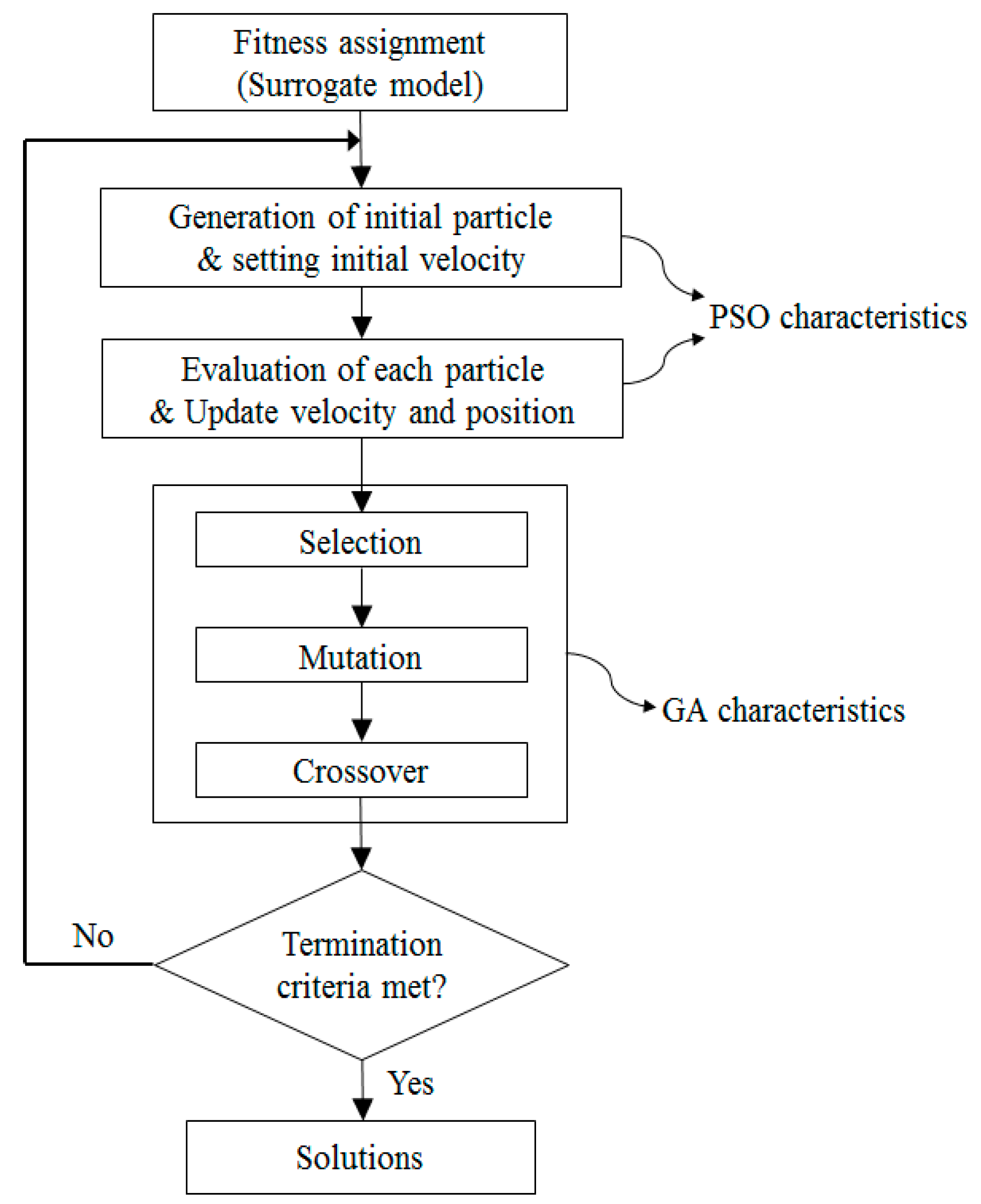
3.3. Searching Algorithm
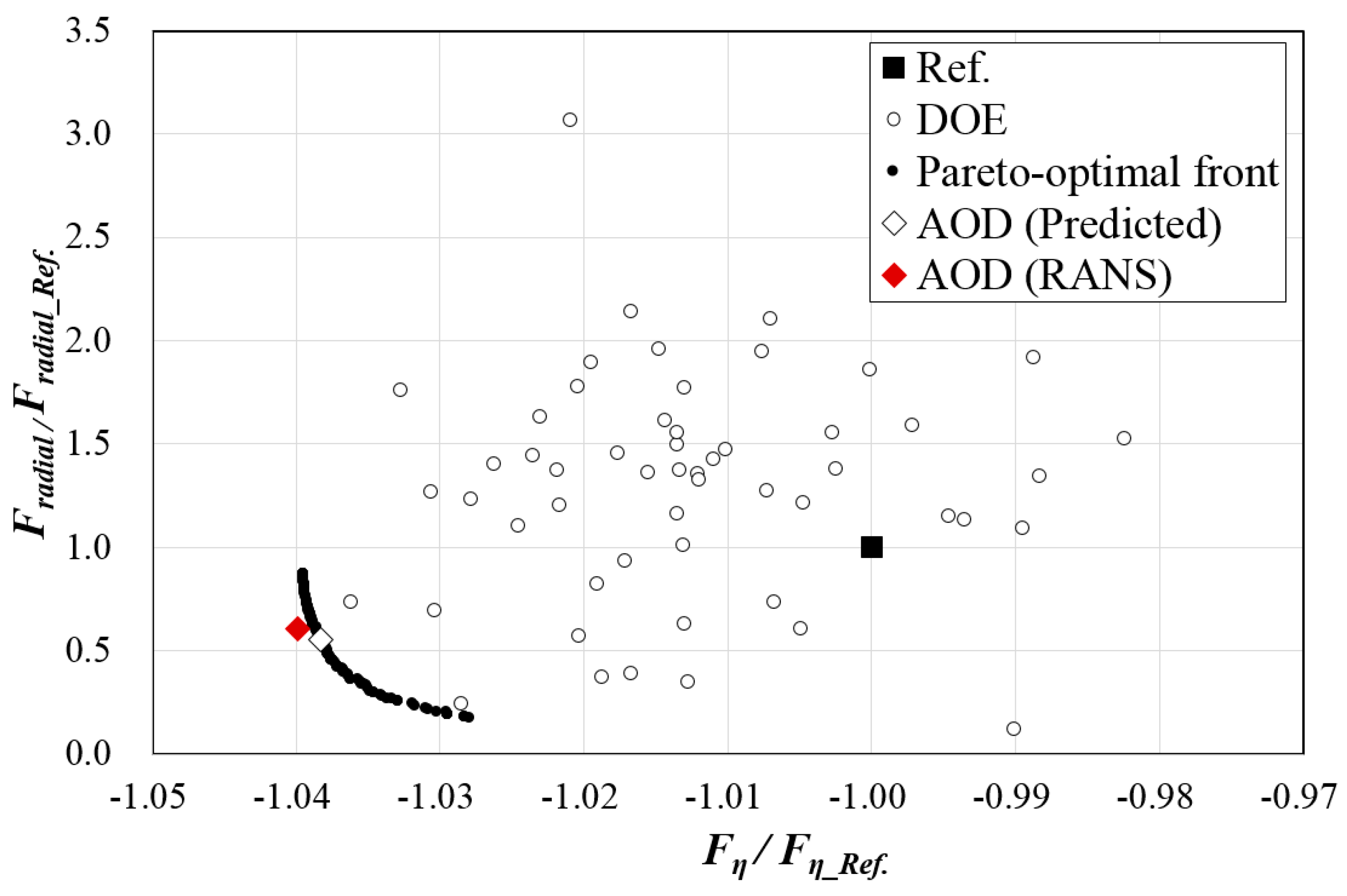
3.4. Optimization Results
4. Results and Discussion
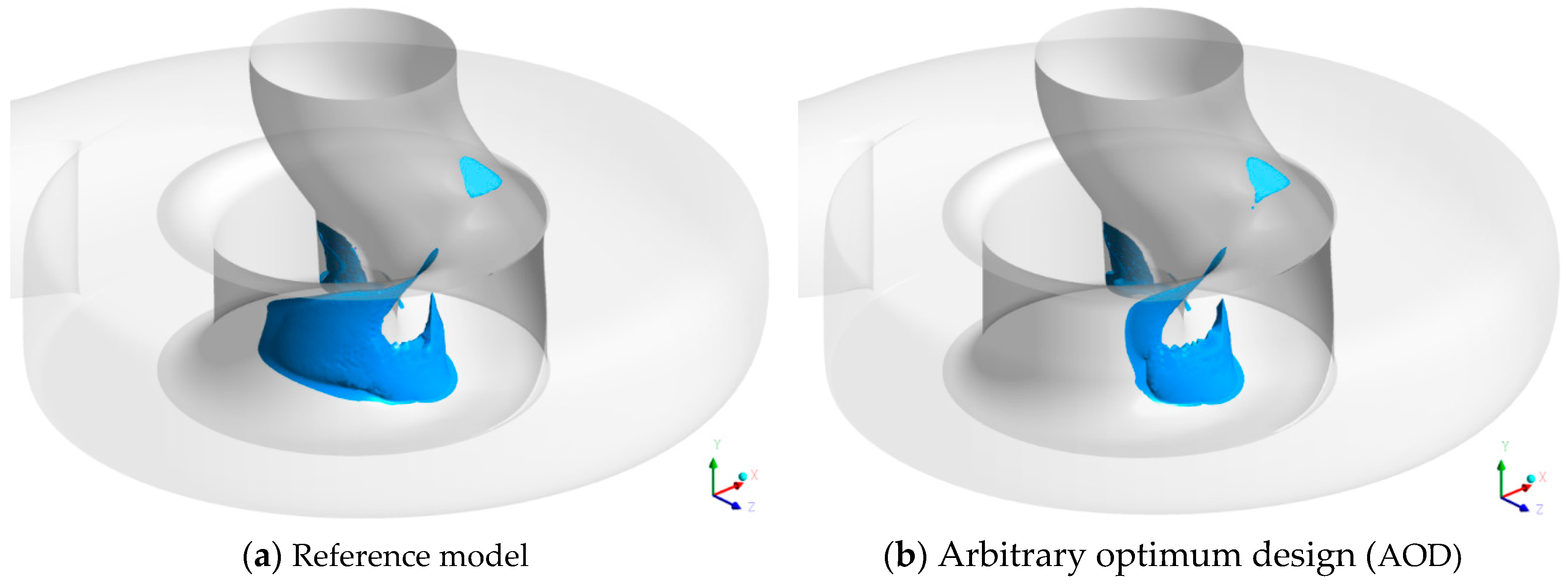
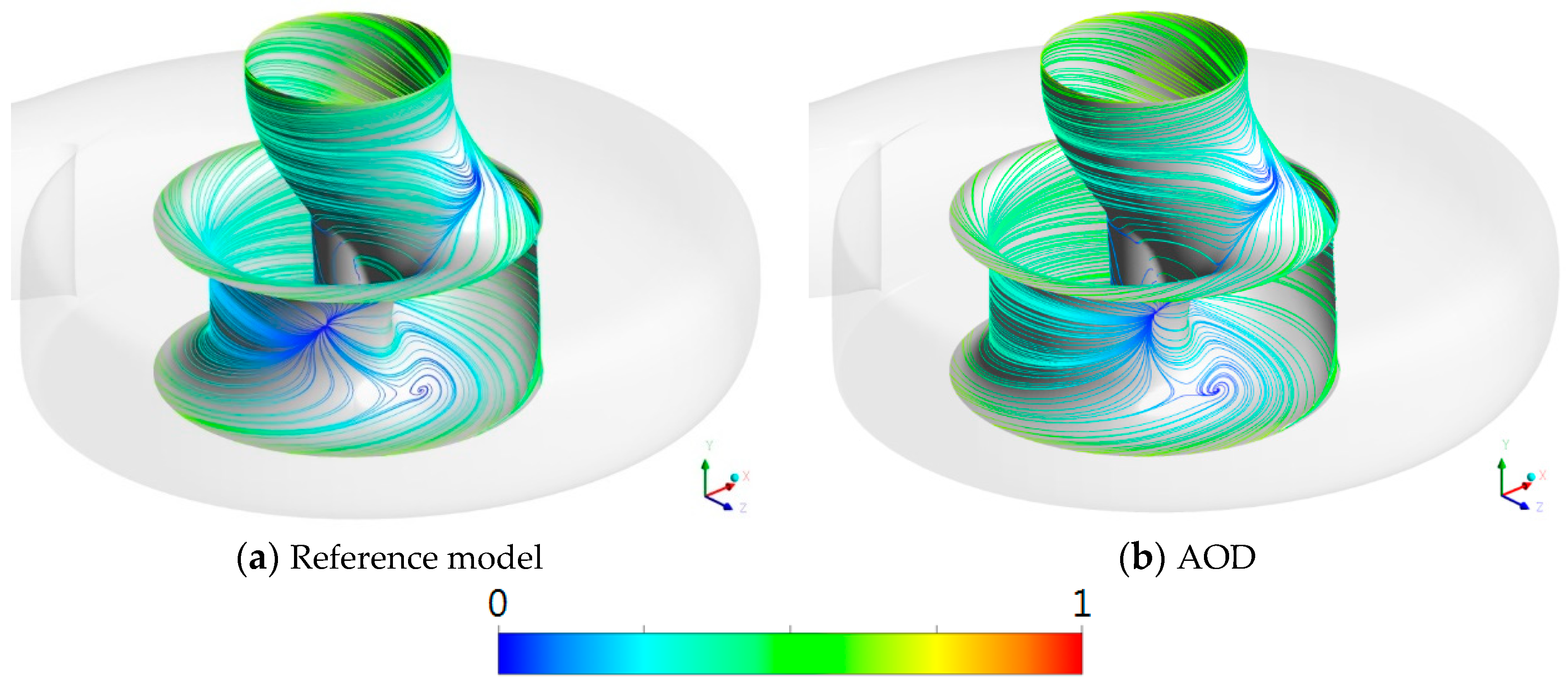
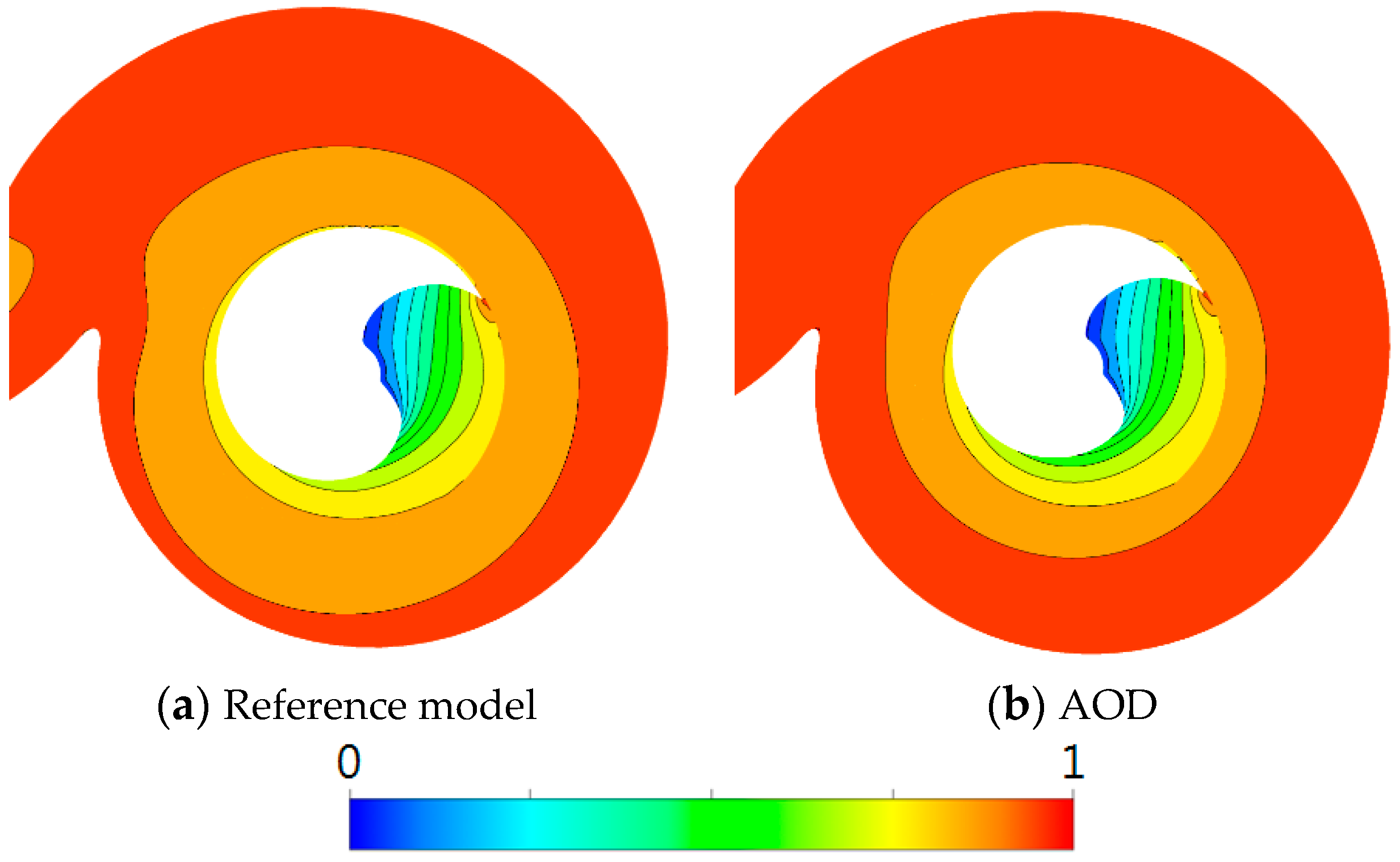
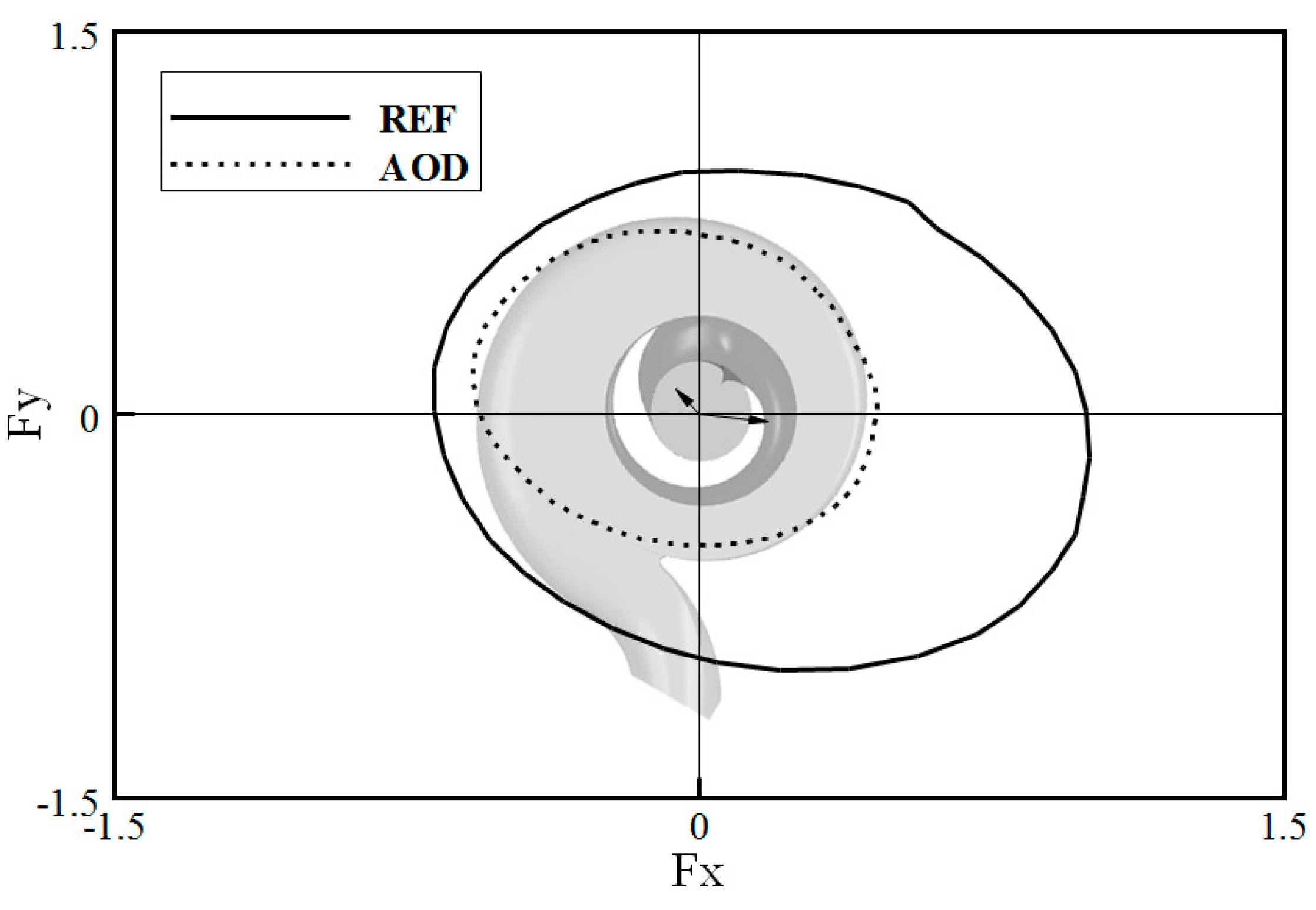
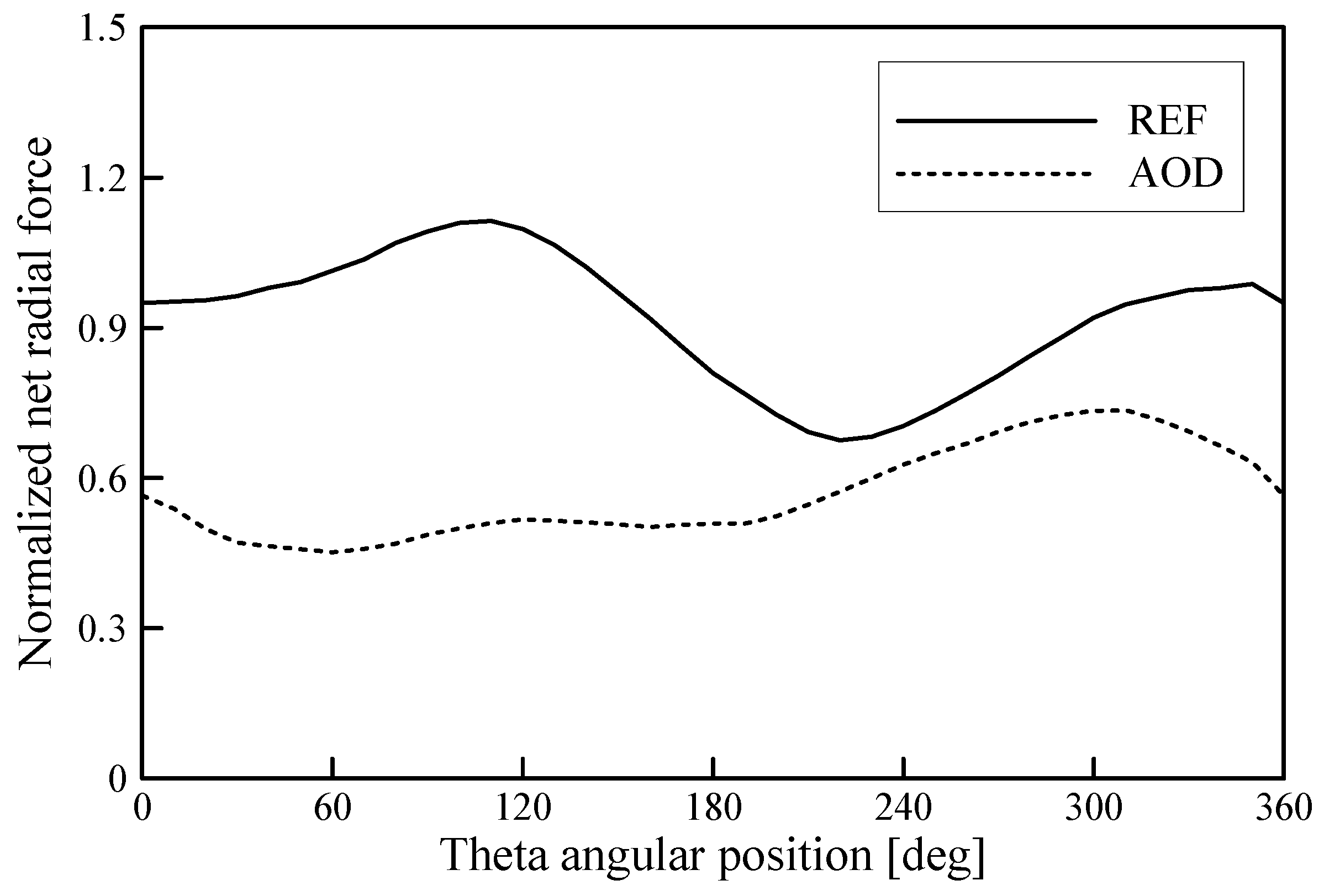
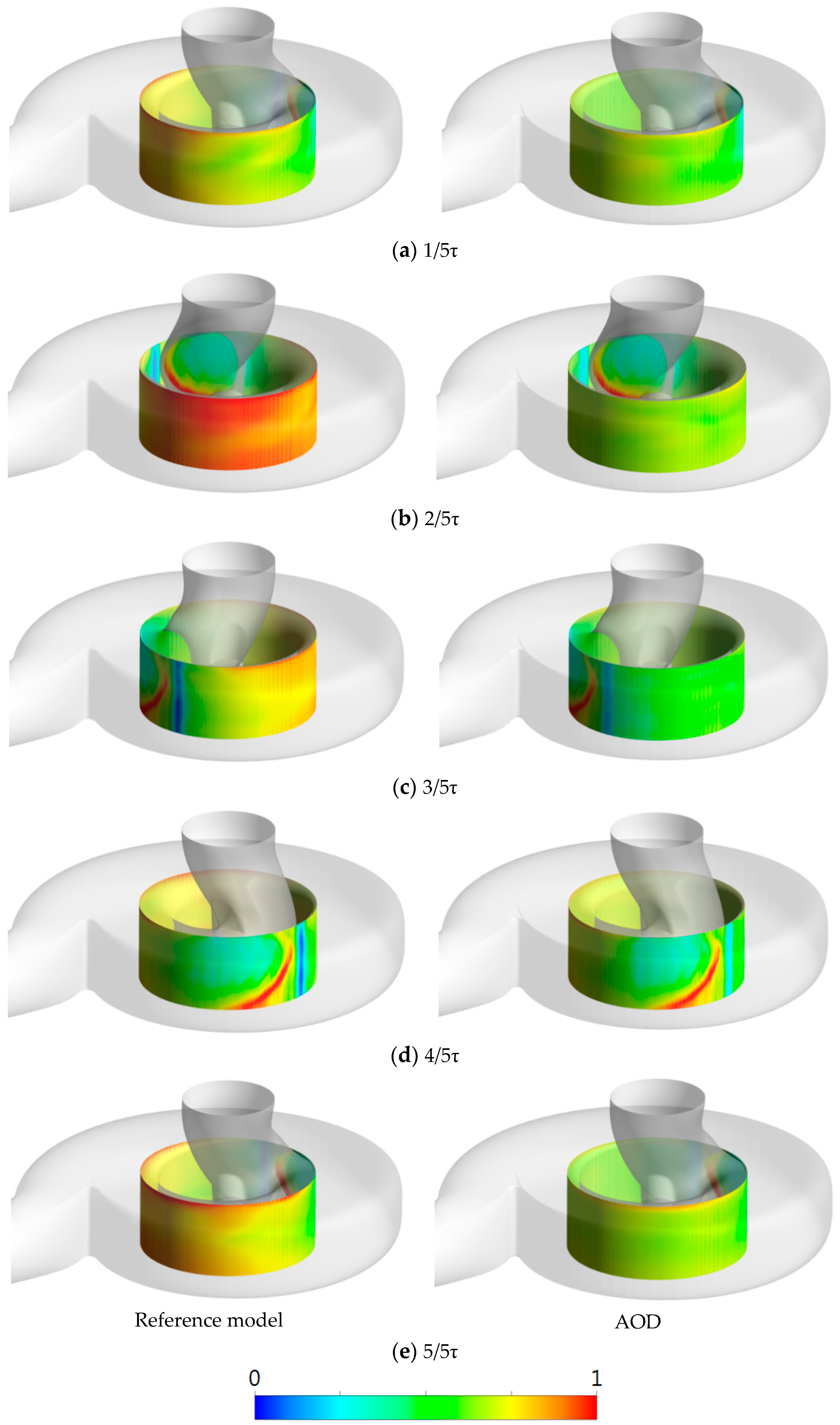
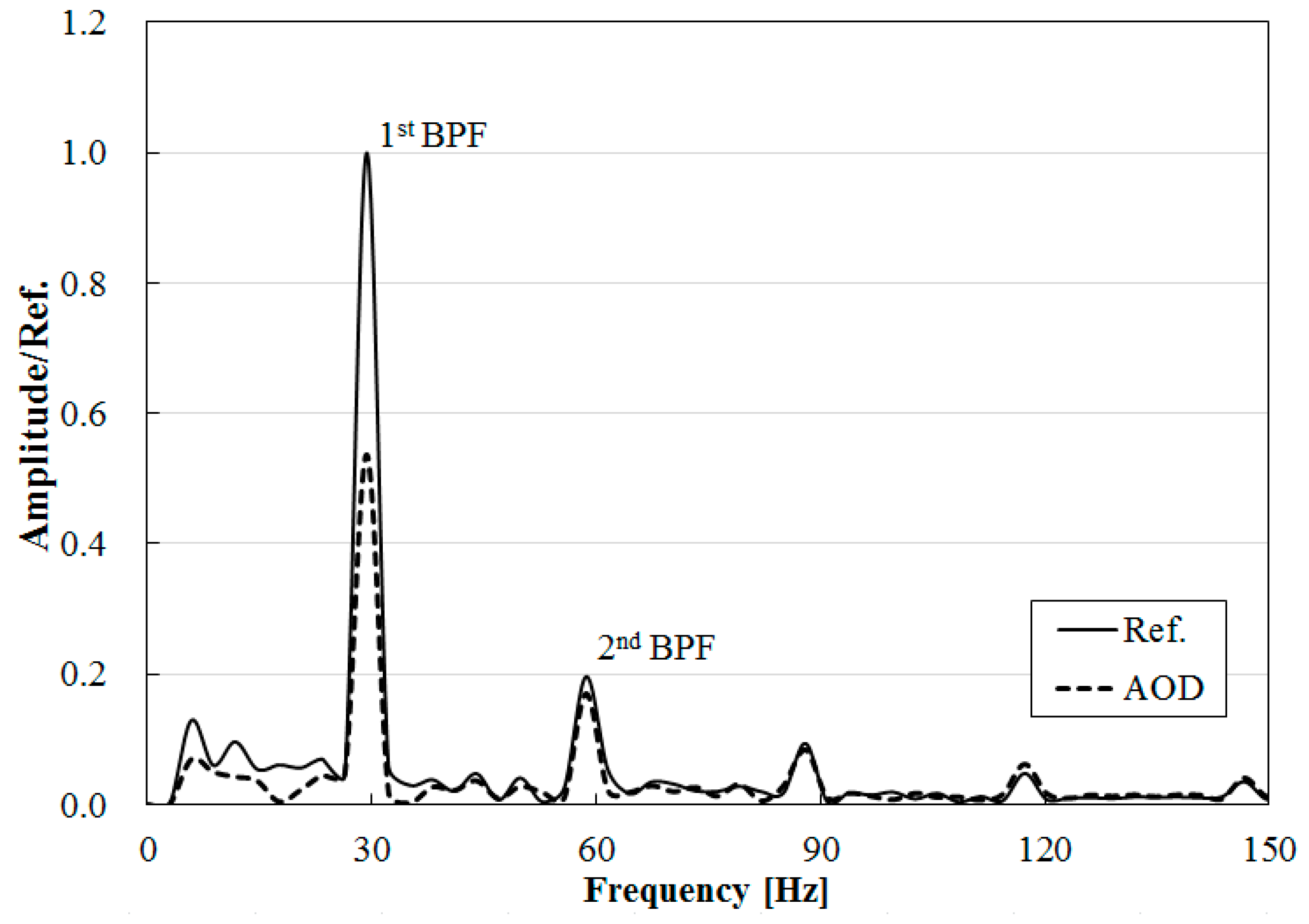
4.1. Unsteady Analyses of Internal Flow Field
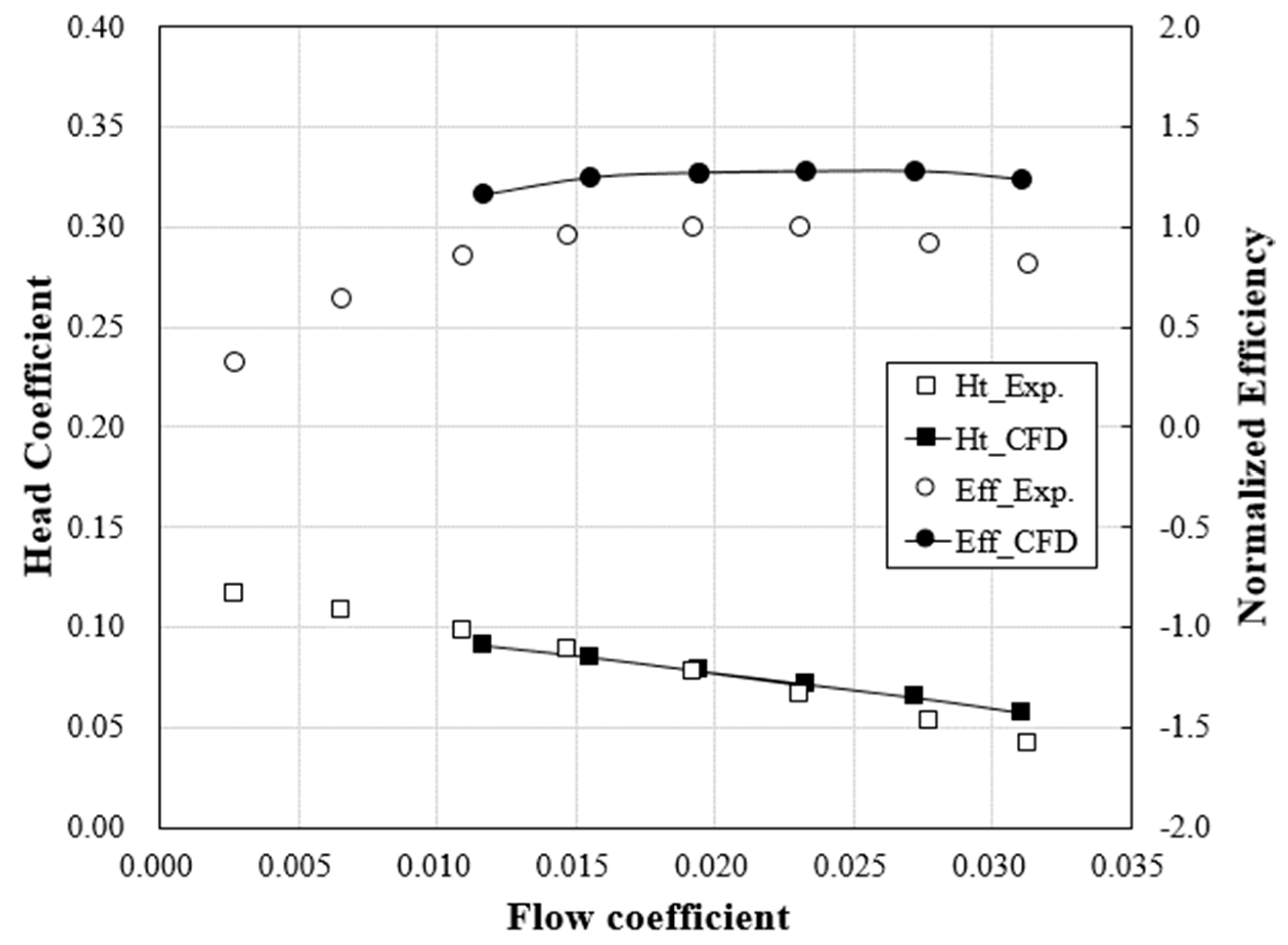
4.2. Performance Verification of the Optimized Prototype Model
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| AOD | Arbitrary optimum design |
| BPF | Blade passing frequency |
| CFD | Computational fluid dynamics |
| CP | Control point |
| D | Diameter of impeller |
| DOE | Design of experiments |
| FSI | Fluid-structure interaction |
| g | Gravity acceleration |
| GA | Genetic algorithm |
| H | Total head |
| LDV | Laser Doppler velocimetry |
| LHS | Latin hypercube sampling |
| N | Rotational speed |
| P | Power |
| PSO | Particle swarm optimization |
| Q | Volume flow rate |
| RANS | Reynolds-averaged Navier-Stokes |
| RBNN | Radial basis neural network |
| SC | Spread constant |
| SST | Shear stress transport |
| (U)RANS | Unsteady Reynolds-averaged Navier-Stokes |
| ρ | Density |
| Ф | Flow coefficient |
| Ψ | Head coefficient |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CP 1 | CP 2 | CP 3 | CP 4 | CP 5 | Fη/Fη_Ref. | Fradial/Fradial_Ref | |
|---|---|---|---|---|---|---|---|
| 1 | 0.000 | 0.000 | 1.000 | 0.000 | 0.000 | −1.021 | 3.064 |
| 2 | 0.000 | 0.000 | 0.000 | 0.000 | 1.000 | −1.033 | 1.759 |
| 3 | 0.000 | 0.000 | 1.000 | 1.000 | 0.000 | −1.017 | 2.144 |
| 4 | 1.000 | 1.000 | 0.000 | 0.000 | 1.000 | −0.982 | 1.527 |
| 5 | 0.265 | 0.306 | 0.429 | 0.980 | 0.837 | −1.026 | 1.403 |
| 6 | 1.000 | 0.469 | 0.286 | 0.592 | 0.571 | −0.994 | 1.133 |
| 7 | 0.551 | 0.735 | 0.327 | 0.490 | 0.000 | −1.012 | 1.355 |
| 8 | 0.959 | 0.184 | 0.857 | 0.531 | 0.327 | −1.007 | 2.109 |
| 9 | 0.020 | 0.857 | 0.224 | 0.449 | 0.265 | −1.014 | 1.161 |
| 10 | 0.939 | 0.653 | 0.796 | 0.673 | 0.878 | −0.988 | 1.344 |
| 11 | 0.449 | 0.510 | 0.735 | 0.000 | 0.469 | −1.016 | 1.362 |
| 12 | 0.347 | 0.408 | 0.776 | 0.918 | 0.163 | −1.015 | 1.958 |
| 13 | 0.694 | 0.041 | 0.510 | 0.694 | 0.694 | −1.024 | 1.441 |
| 14 | 0.633 | 0.878 | 0.122 | 0.735 | 0.633 | −1.003 | 1.377 |
| 15 | 0.796 | 0.714 | 0.592 | 0.061 | 0.082 | −1.000 | 1.861 |
| 16 | 0.571 | 0.265 | 1.000 | 0.388 | 0.714 | −1.020 | 1.778 |
| 17 | 0.857 | 0.245 | 0.061 | 0.184 | 0.898 | −1.013 | 0.628 |
| 18 | 0.918 | 0.694 | 0.449 | 0.122 | 0.776 | −1.013 | 0.347 |
| 19 | 0.388 | 0.959 | 0.551 | 0.265 | 0.408 | −1.011 | 1.429 |
| 20 | 0.245 | 0.918 | 0.980 | 0.755 | 0.245 | −1.014 | 1.495 |
| 21 | 0.184 | 0.000 | 0.184 | 0.551 | 0.755 | −1.036 | 0.738 |
| 22 | 0.306 | 0.020 | 0.878 | 0.857 | 0.551 | −1.023 | 1.630 |
| 23 | 0.837 | 0.061 | 0.633 | 0.143 | 0.673 | −1.013 | 1.011 |
| 24 | 0.327 | 0.429 | 0.020 | 0.510 | 0.306 | −1.020 | 0.569 |
| 25 | 0.878 | 0.980 | 0.245 | 0.327 | 0.367 | −0.990 | 0.122 |
| 26 | 0.469 | 0.939 | 0.673 | 0.837 | 0.816 | −1.003 | 1.557 |
| 27 | 0.429 | 0.796 | 0.000 | 0.224 | 0.612 | −1.029 | 0.244 |
| 28 | 0.898 | 0.571 | 0.694 | 0.939 | 0.347 | −0.997 | 1.591 |
| 29 | 0.816 | 0.837 | 0.918 | 0.306 | 0.490 | −0.989 | 1.920 |
| 30 | 0.714 | 0.143 | 0.367 | 0.653 | 0.143 | −1.013 | 1.559 |
| 31 | 0.143 | 0.082 | 0.653 | 0.082 | 0.592 | −1.031 | 1.271 |
| 32 | 0.735 | 0.592 | 0.898 | 0.612 | 0.020 | −1.008 | 1.950 |
| 33 | 0.286 | 0.776 | 0.959 | 0.286 | 0.796 | −1.007 | 1.275 |
| 34 | 0.224 | 0.327 | 0.265 | 0.041 | 0.102 | −1.025 | 1.103 |
| 35 | 0.061 | 0.286 | 0.306 | 0.878 | 0.204 | −1.022 | 1.207 |
| 36 | 0.755 | 0.490 | 0.041 | 0.163 | 0.184 | −1.007 | 0.738 |
| 37 | 0.102 | 0.633 | 0.143 | 0.633 | 0.857 | −1.019 | 0.373 |
| 38 | 0.673 | 1.000 | 0.612 | 0.776 | 0.286 | −0.995 | 1.152 |
| 39 | 0.980 | 0.755 | 0.102 | 0.816 | 0.122 | −0.989 | 1.095 |
| 40 | 0.776 | 0.122 | 0.490 | 0.102 | 0.061 | −1.018 | 1.457 |
| 41 | 0.612 | 0.347 | 0.082 | 0.714 | 0.918 | −1.019 | 0.821 |
| 42 | 0.000 | 0.388 | 0.469 | 0.429 | 0.449 | −1.022 | 1.374 |
| 43 | 0.592 | 0.449 | 0.163 | 1.000 | 0.388 | −1.012 | 1.328 |
| 44 | 0.490 | 0.367 | 0.531 | 0.245 | 0.939 | −1.017 | 0.387 |
| 45 | 0.367 | 0.163 | 0.755 | 0.408 | 0.224 | −1.019 | 1.892 |
| 46 | 0.510 | 0.531 | 0.571 | 0.571 | 0.510 | −1.013 | 1.373 |
| 47 | 0.408 | 0.898 | 0.408 | 0.347 | 1.000 | −1.005 | 0.605 |
| 48 | 0.204 | 0.816 | 0.347 | 0.959 | 0.429 | −1.005 | 1.218 |
| 49 | 0.653 | 0.224 | 0.939 | 0.898 | 0.980 | −1.013 | 1.769 |
| 50 | 0.041 | 0.551 | 0.837 | 0.796 | 0.653 | −1.010 | 1.476 |
| 51 | 0.122 | 0.612 | 0.388 | 0.020 | 0.735 | −1.017 | 0.936 |
| 52 | 0.163 | 0.673 | 0.714 | 0.367 | 0.041 | −1.014 | 1.613 |
| 53 | 0.082 | 0.204 | 0.816 | 0.469 | 0.959 | −1.028 | 1.234 |
| 54 | 0.531 | 0.102 | 0.204 | 0.204 | 0.531 | −1.030 | 0.696 |
Appendix B
| g = 0 * g: generation number |
| fori = 1 to M do * M: population (particles) size |
| Initialize particles of PSO xi to random values |
| xib = xi * xb: initial information of particle |
| Fi = f(xi) * f: fitness assignment |
| end for |
| xgb = best{xib; i = 1, …, M} * xg: initial global best particle |
| Pop = {x1, x2, …, xM} |
| F = {F1, F2, …, FM} |
| <Main Loop> |
| while do |
| {Evaluation Loop 1} |
| for i = 1 to M do |
| if f(xi) is better than f(xib) then |
| xib = xi |
| end if |
| iff(xib) is better than f(xgb) then |
| xgb = xib |
| end if |
| end for |
| {Genetic Operators – Update particles’ position} |
| Pop ← Selection(Pop, F) |
| Pop ← Crossover(Pop, C) * C: crossover rate |
| Pop ← Mutation(Pop, M) * M: mutation rate |
| {Evaluation Loop 2} |
| for i = 1 to M do |
| Fi = f(xi) |
| end for |
| F = {F1, F2, …, FM} |
| g = g+1 |
| end while |
References
- Steinmann, A.; Wurm, H.; Otto, A. Numerical and Experimental Investigations of the Unsteady Cavitating Flow in a Vortex Pump. J. Hydrodyn. 2010, 22, 319–324. [Google Scholar] [CrossRef]
- Nishi, Y.; Matsuo, N.; Fukutomi, J. A Study on Internal Flow in a New Type of Sewage Pump. J. Fluid Sci. Technol. 2009, 4, 661–671. [Google Scholar] [CrossRef]
- Liu, J.; Wang, R. Simulation and Research on Flow of Whirl Cavity in a Vortex Pump. In Proceedings of the International Conference on Computer Design and Applications, Qinhuangdao, China, 25–27 June 2010. [Google Scholar]
- Hansen, B.F.; Henning, P.J. Waste Water Pump. U.S. Patent Application US9500204B2, 11 November 2016. [Google Scholar]
- Qin, W.; Tsukamoto, H. Theoretical Study of Pressure Fluctuations Downstream of a Diffuser Pump Impeller-Part 1: Fundamental Analysis on Rotor-Stator Interaction. J. Fluid Eng. 1997, 199, 647–652. [Google Scholar] [CrossRef]
- Shi, F.; Tsukamoto, H. Numerical Study of Pressure Fluctuations Caused by Impeller-Diffuser Interaction in a Diffuser Pump Stage. J. Fluid Eng. 2001, 123, 466–474. [Google Scholar] [CrossRef]
- Feng, J.; Benra, F.K.; Dohmen, H.J. Investigation of Periodically Unsteady Flow in a Radial Pump by CFD Simulations and LDV Measurements. J. Turbomach. 2010, 133, 011004. [Google Scholar] [CrossRef]
- Zhang, M.; Tsukamoto, H. Unsteady Hydrodynamic Forces due to Rotor-Stator Interaction on a Diffuser Pump with Identical Number of Vanes on the Impeller and Diffuser. J. Fluid Eng. 2005, 127, 743–751. [Google Scholar] [CrossRef]
- Benra, F.K. Numerical and Experimental Investigation on the Flow Induced Oscillations of a Single-Blade Pump Impeller. J. Fluid Eng. 2006, 128, 783–793. [Google Scholar] [CrossRef]
- Nishi, Y.; Fujiwara, R.; Fukutomi, J. Design Method for Single-Blade Centrifugal Pump Impeller. J. Fluid Sci. Technol. 2009, 4, 786–800. [Google Scholar] [CrossRef]
- Pei, J.; Yuan, S.; Yuan, J. Numerical analysis of periodic flow unsteadiness in a single-blade centrifugal pump. Sci. China Technol. Sci. 2013, 56, 212–221. [Google Scholar] [CrossRef]
- Eberhart, R.C.; Kennedy, J. A New Optimizer Using Particle Swarm Theory. In Proceedings of the Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995; pp. 39–43. [Google Scholar]
- Deb, K.; Agrawal, S.; Pratap, A.; Meyarivan, T. A Fast Elitist Non-Dominated Sorting Genetic Algorithm for Multi-Objective Optimization: NSGA-Ⅱ. In Proceedings of the International Conference on Parallel Problem Solving form Nature, Paris, France, 18–20 September 2000; pp. 849–858. [Google Scholar]
- Ma, S.B.; Kim, K.Y. Optimization of Discrete Cavities in a Centrifugal Compressor to Enhance Operating Stability. Aerosp. Sci. Technol. 2017, 68, 308–319. [Google Scholar] [CrossRef]
- Dinh, C.T.; Ma, S.B.; Kim, K.Y. Aerodynamic optimization of a single-stage axial compressor with stator shroud air injection. AIAA J. 2017, 55, 2739–2754. [Google Scholar] [CrossRef]
- Robinson, J.; Sinton, S.; Rahmat-Samii, Y. Particle swarm, genetic algorithm, and their hybrids: Optimization of a profiled corrugated horn antenna. In Proceedings of the IEEE Antennas and Propagation Society International Symposium, San Antonio, TX, USA, 16–21 June 2002; pp. 314–317. [Google Scholar]
- Shi, X.H.; Wan, L.M.; Lee, H.P.; Yang, X.W.; Wang, L.M.; Liang, Y.C. An improved genetic algorithm with variable population-size and a PSO-GA based hybrid evolutionary algorithm. In Proceedings of the 2003 International Conference on Machine Learning and Cybernetics, Xi’an, China, 5 November 2003; pp. 1735–1740. [Google Scholar]
- Gandelli, A.; Grimaccia, F.; Mussetta, M.; Pirinoli, P.; Zich, R.E. Development and validation of different hybridization strategies between GA and PSO. In Proceedings of the 2007 IEEE Congress on Evolutionary Computation, Singapore, 25–28 September 2007; pp. 2782–2787. [Google Scholar]
- Orr, M.J.L. Introduction to radial basis function networks. Time, April 1996; 1–67. [Google Scholar]
- McKay, M.D.; Beckman, R.J.; Conover, W.J. A comparison of three methods for selecting values of input variables in the analysis of output from a computer code. Technometrics 2000, 42, 55–61. [Google Scholar] [CrossRef]
- Cho, B.M.; Kim, J.H.; Choi, Y.S.; Lee, K.Y.; Oh, H.Y.; Kim, K.Y.; Kim, Y.S.; Kim, J.H. High-efficiency design technique of a single-channel submersible pump impeller for waste treatment. In Proceedings of the ASME/JSME/KSME 2015 Joint Fluids Engineering Conference, Seoul, Korea, 26–31 July 2015; Volume 1A. [Google Scholar]
- Kim, J.-H.; Cho, B.-M.; Choi, Y.-S.; Lee, K.-Y. Multi-objective Optimization Based on Unsteady Analysis Considering the Efficiency and Radial Force of a Single-Channel Pump for Wastewater Treatment. J. Mech. Eng. Autom. 2016, 6, 234–245. [Google Scholar]
- Song, W.-G.; Ma, S.-B.; Choi, Y.-S.; Lee, K.-Y.; Kim, Y.-S.; Kim, K.-Y.; Kim, J.-H. Multi-Objective Optimization for Designing a High-Efficiency and Low-Fluid-Induced-Vibration Single-Channel Pump. KSFM J. Fluid Mach. 2018, 21, 30–38. [Google Scholar] [CrossRef]
- Kim, J.-H.; Choi, Y.S. State-of-the-Art Design Technique of a Single-Channel Pump for Wastewater Treatment; Wastewater and Water Quality: London, UK, 2018. [Google Scholar]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef]
- Afzal, A.; Kim, K.Y. Optimization of pulsatile flow and geometry of a convergent-divergent micromixer. Chem. Eng. J. 2015, 281, 134–143. [Google Scholar] [CrossRef]
- MATLAB®. The Language of Technical Computing; MathWork Inc.: Natick, MA, USA, 2014. [Google Scholar]
- Society, R.S. Cross-Validatory Choice and Assessment of Statistical Predictions. J. R. Stat. Soc. Ser. B (Methodol.) 2009, 36, 111–147. [Google Scholar]
- Kim, J.H.; Song, W.G.; Choi, Y.S.; Lee, K.Y.; Ma, S.B.; Kim, K.Y. Three-objective optimization of a single-channel pump for wastewater treatment. IOP Conf. Ser. Earth Environ. Sci. 2019, 240, 370–381. [Google Scholar] [CrossRef]





















| Flow coefficient (Ф) | 0.019 |
| Head coefficient (ψ) | 0.074 |
| Rotational speed (RPM) | 1760 |
| Impeller inlet-outlet diameter ratio | 1.9 |
| LB | Ref. | UB | |
|---|---|---|---|
| CP 1 | 0.03 | 0.32 | 0.61 |
| CP 2 | 0.42 | 0.71 | 1.00 |
| CP 3 | 0.00 | 0.25 | 0.50 |
| CP 4 | 0.00 | 0.50 | 1.00 |
| CP 5 | 0.50 | 0.75 | 1.00 |
| Design Variables | Predicted Values | (U)RANS | Relative Error (%) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| AOD | CP 1 | CP 2 | CP 3 | CP 4 | CP 5 | Fη/Fη_Ref. | Fradial/Fradial_Ref | Fη/Fη_Ref. | Fradial/Fradial_Ref | Fη/Fη_Ref. | Fradial/Fradial_Ref |
| 0.600 | 0.004 | 0.003 | 0.214 | 0.837 | −1.038 | 0.5520 | −1.040 | 0.6050 | 0.16 | 8.77 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.-H.; Ma, S.-B.; Kim, S.; Choi, Y.-S.; Kim, K.-Y. Design and Verification of a Single-Channel Pump Model based on a Hybrid Optimization Technique. Processes 2019, 7, 747. https://doi.org/10.3390/pr7100747
Kim J-H, Ma S-B, Kim S, Choi Y-S, Kim K-Y. Design and Verification of a Single-Channel Pump Model based on a Hybrid Optimization Technique. Processes. 2019; 7(10):747. https://doi.org/10.3390/pr7100747
Chicago/Turabian StyleKim, Jin-Hyuk, Sang-Bum Ma, Sung Kim, Young-Seok Choi, and Kwang-Yong Kim. 2019. "Design and Verification of a Single-Channel Pump Model based on a Hybrid Optimization Technique" Processes 7, no. 10: 747. https://doi.org/10.3390/pr7100747
APA StyleKim, J.-H., Ma, S.-B., Kim, S., Choi, Y.-S., & Kim, K.-Y. (2019). Design and Verification of a Single-Channel Pump Model based on a Hybrid Optimization Technique. Processes, 7(10), 747. https://doi.org/10.3390/pr7100747