
A Day-Ahead Optimization of a Distribution Network Based on the Aggregation of Distributed PV and ES Units


Abstract
1. Introduction
- A PV and ES aggregation method is proposed, which determines the AFR for active and reactive power through Minkowski summation and polytope inner approximation, providing dispatchable capabilities for subsequent optimal scheduling.
- A conservative representation of probability density confidence intervals is developed for new energy and load uncertainties. The flexibility supply and demand balance is derived through the KDE method. Confidence levels are incorporated to transform the uncertainty of PV systems and load into a deterministic flexibility balance problem.
- A day-ahead optimal scheduling method based on the proposed PV and ES aggregation model and flexibility supply and demand balance is proposed, which helps achieve the aggregation of distributed resources and the overall strategy of distribution network scheduling.
2. AFR for Distributed PV and ES
2.1. Aggregation of Distributed PV Units
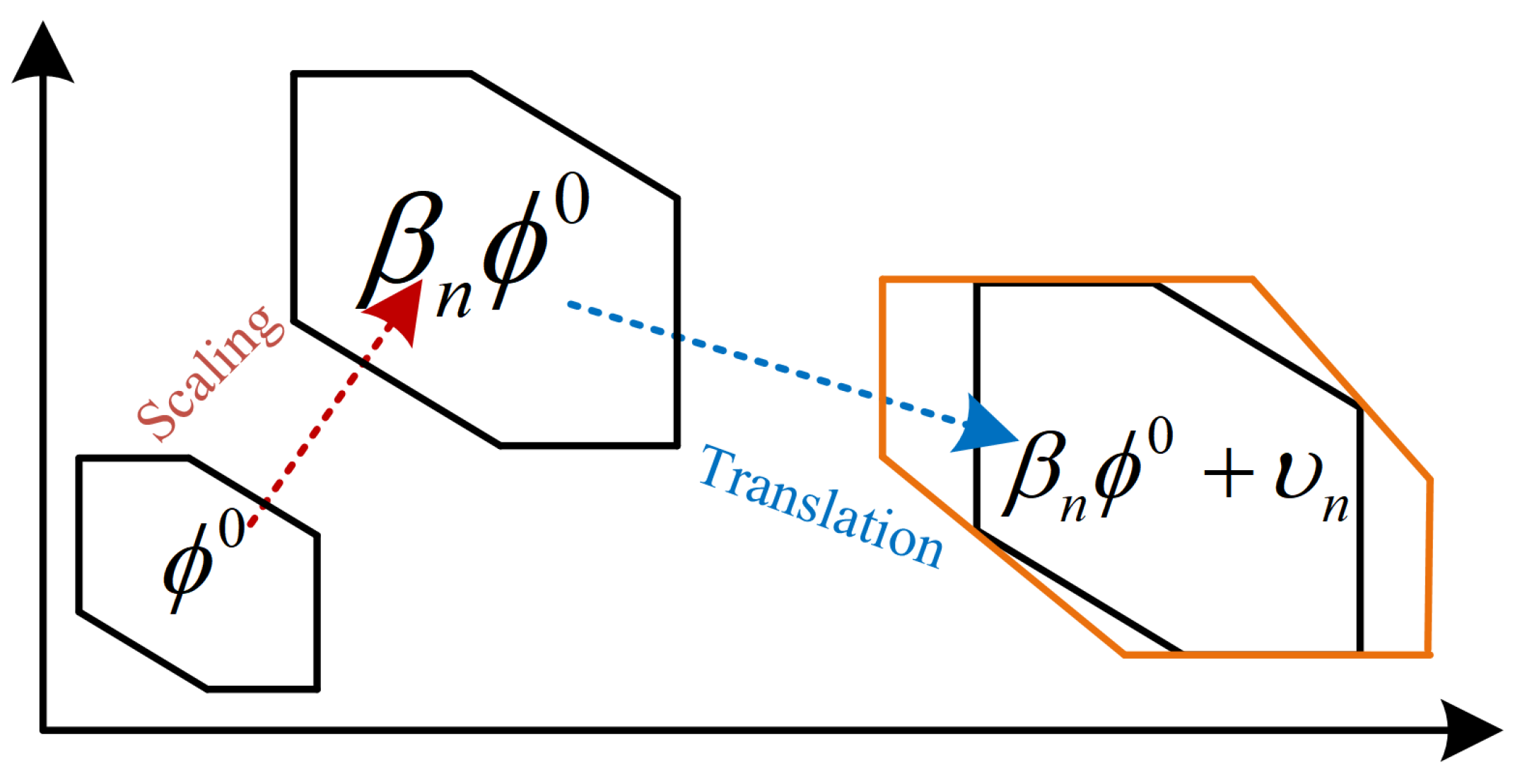
2.2. Aggregation of Distributed ES Units
3. Flexible Supply and Demand Balance
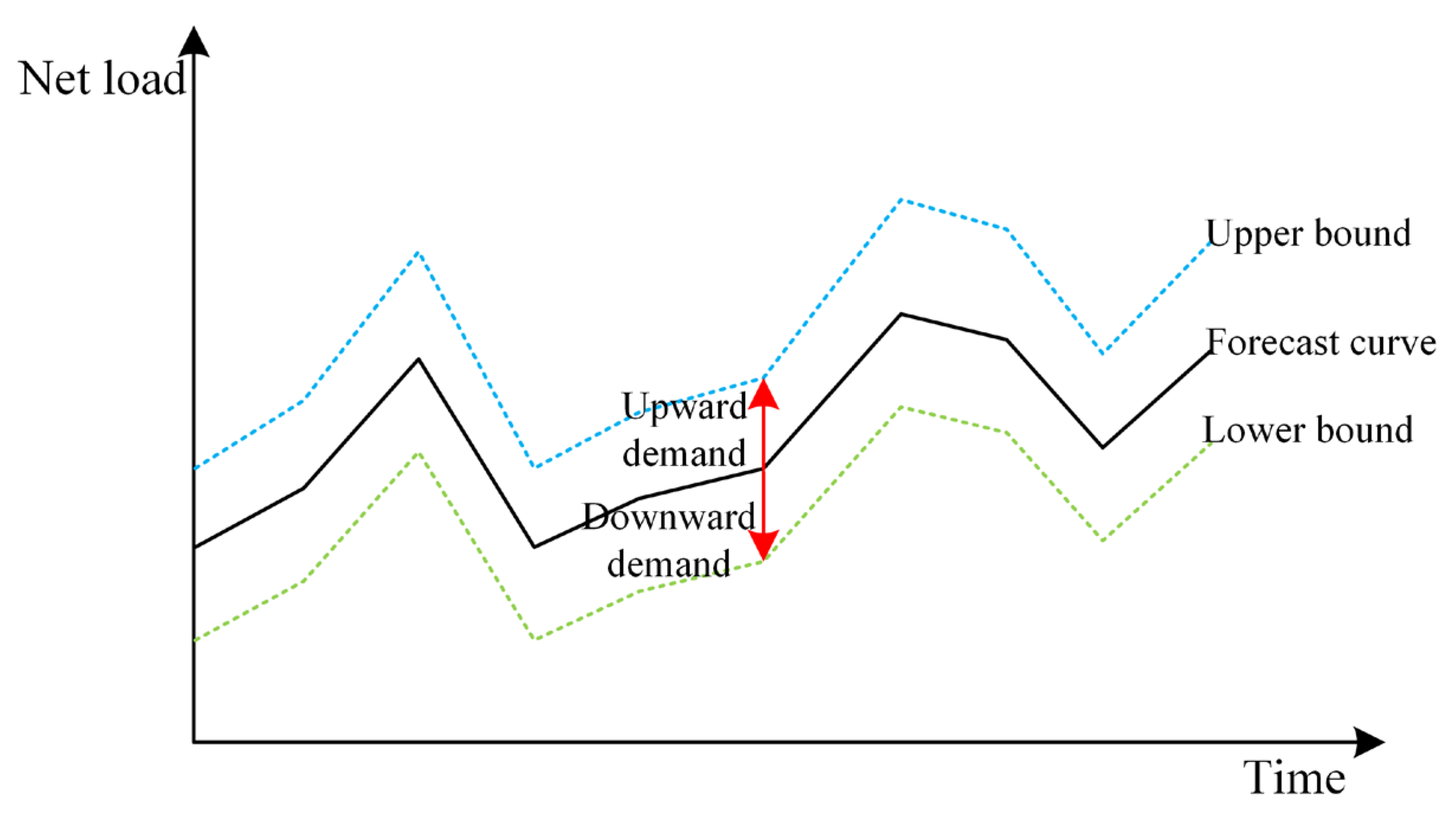
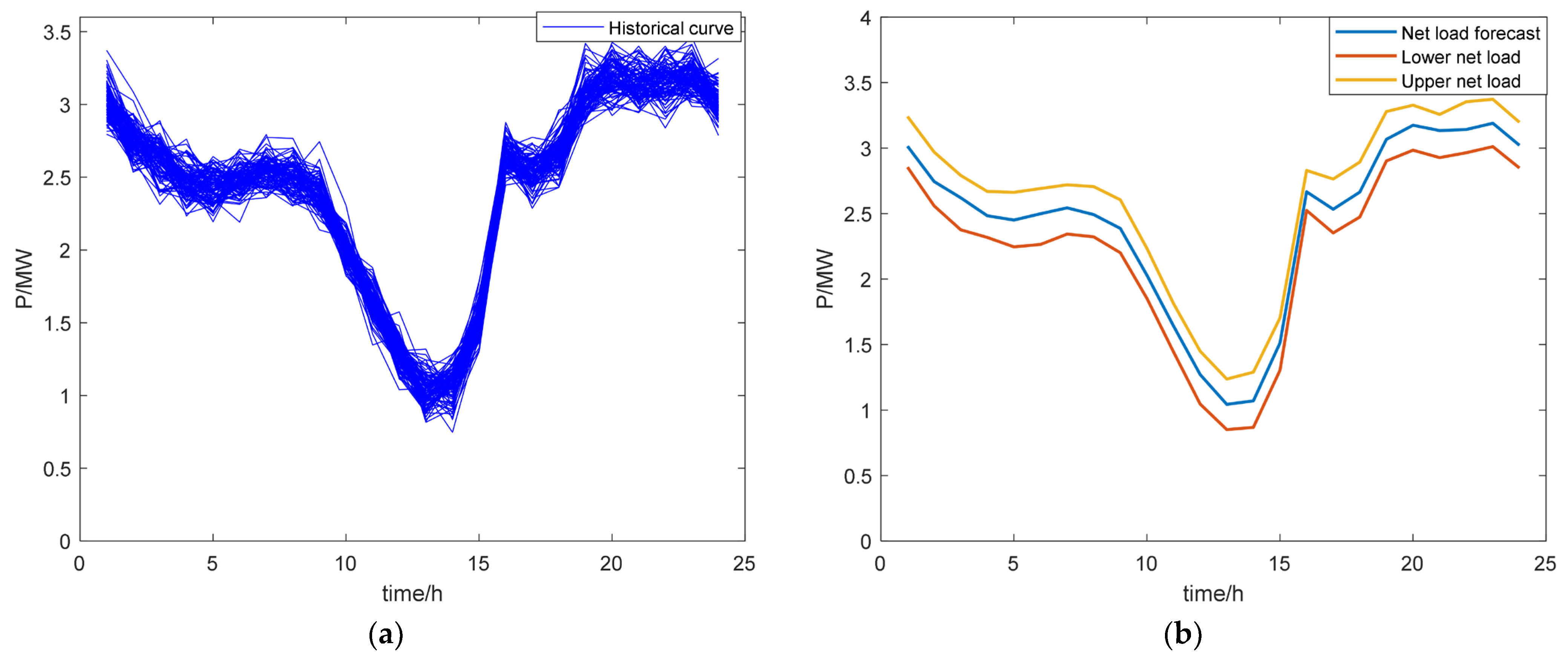
3.1. Mathematical Model of Net Load Uncertainty
3.2. Model of Flexible Resources
- (1)
- Supply of ESA
- (2)
- Supply of regional grid
4. Day-Ahead Distribution Network Optimization Considering Aggregation and Uncertainty
4.1. Objective Function
- (1)
- PVA dispatch cost
- (2)
- ESA dispatch cost
- (3)
- Power purchase cost from the regional grid
4.2. Constraints
- (1)
- PVA operational constraints
- (2)
- ESA operational constraints
- (3)
- Power constraints on regional grid tie lines
- (4)
- Supply and demand balance constraints
- (5)
- Power system flow constraints
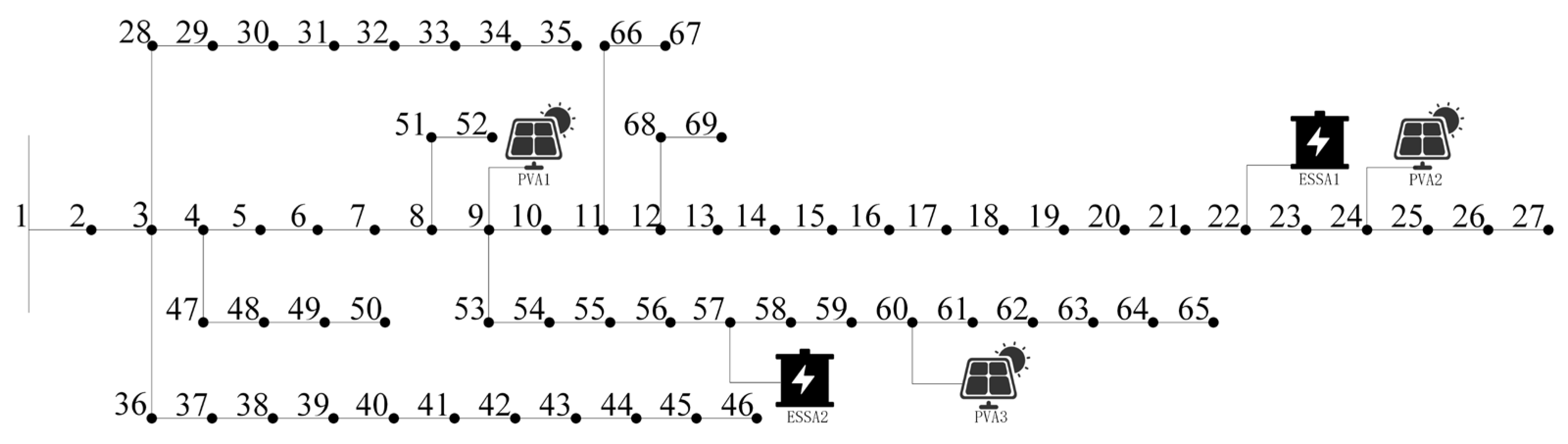
5. Case Study
5.1. PV and ES Aggregate Results
- (1)
- PV aggregate results
- (2)
- ES aggregate results
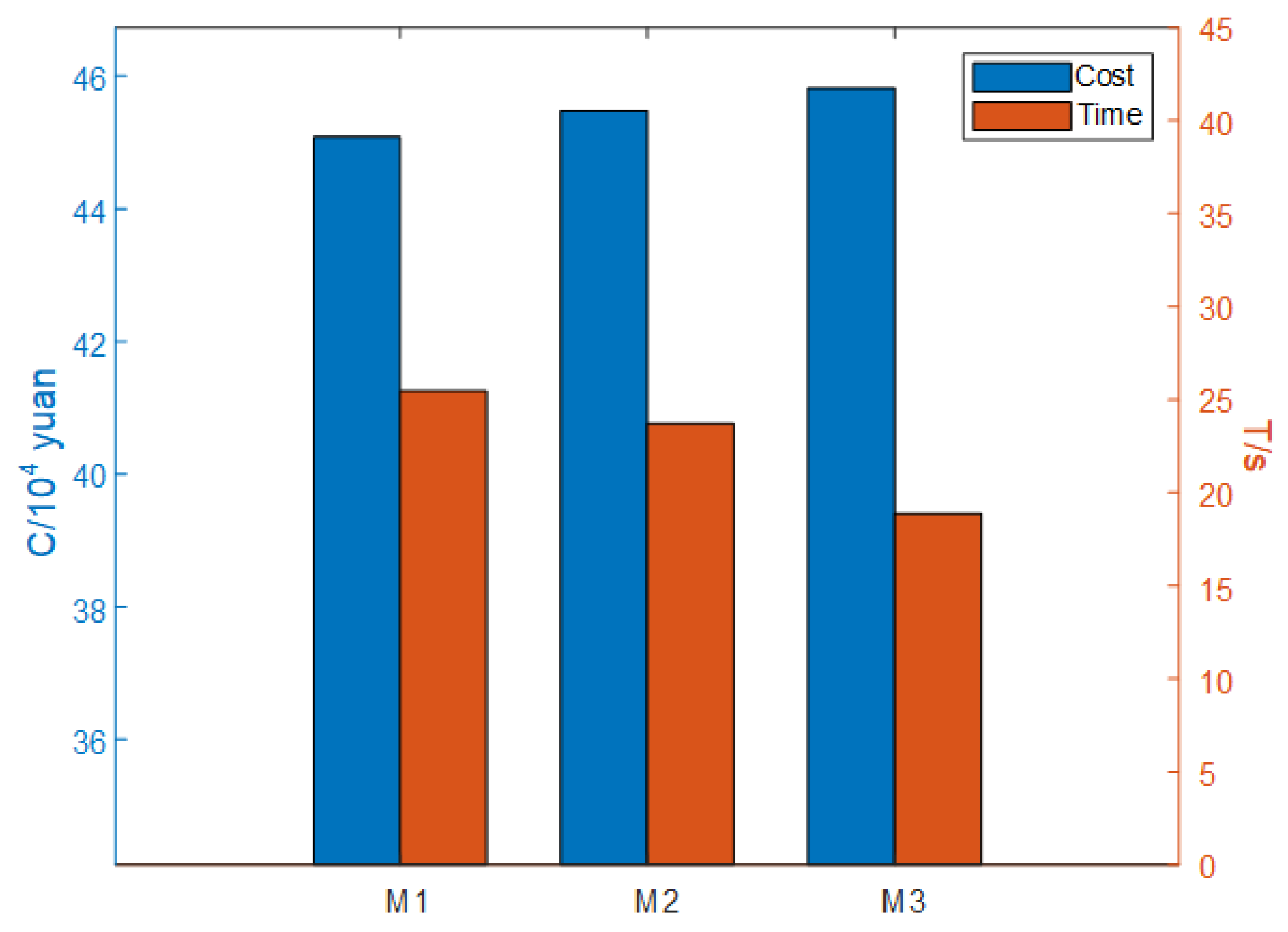
- Method 1 (M1): Original optimal scheduling without using the aggregation method;
- Method 2 (M2): Proposed method, Minkowski summation and polytope inner approximation for aggregation optimal scheduling;
- Method 3 (M3): Box inner approximate method [28] for aggregation optimal scheduling.
5.2. Distribution Network Day-Ahead Optimization Results
- (1)
- Flexibility in supply and demand balance
- (2)
- Distribution network optimization
- (3)
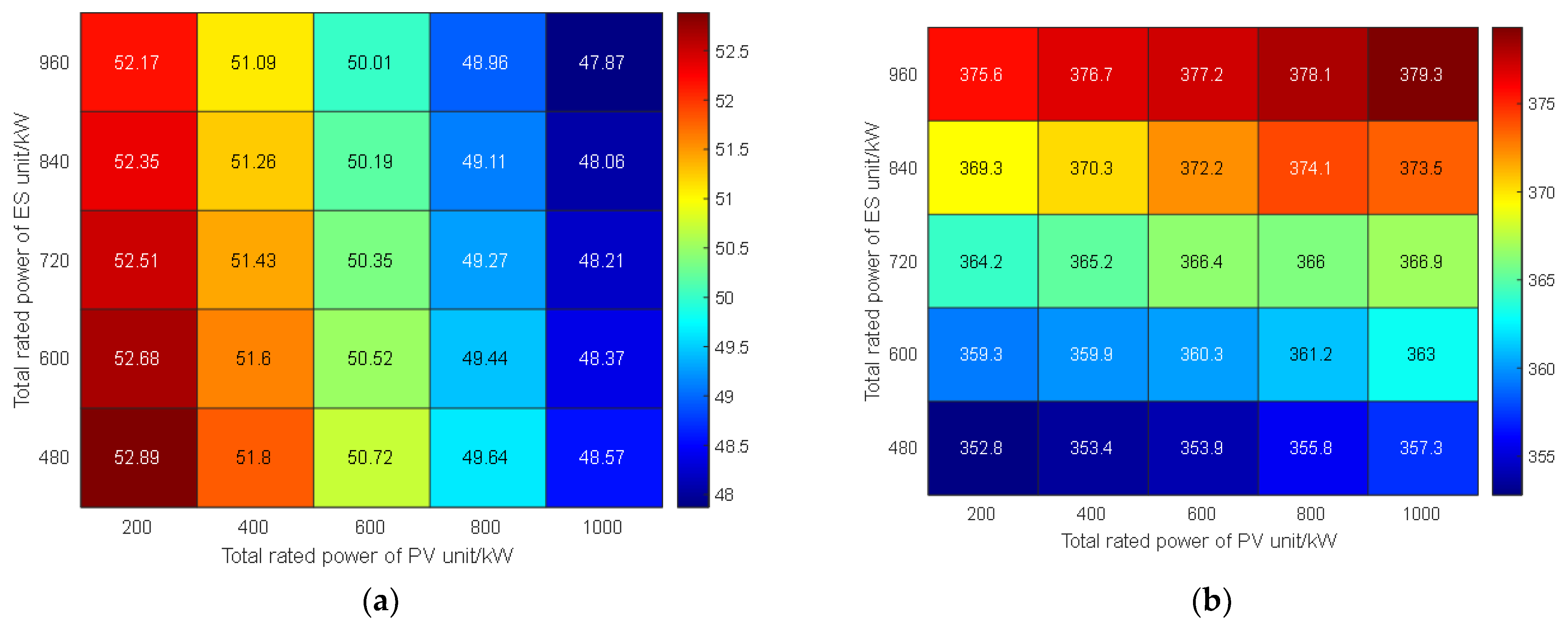
- Sensitivity analysis
6. Conclusions
- The Minkowski summation method for PV systems and the polytope inner approximation method for ES are proposed. These methods effectively aggregate distributed PV and ES units into resource aggregators through mathematical modeling and algorithm design. Compared to the box inner approximation method, the AFR is enlarged, and the aggregation effect is more pronounced.
- To address the uncertainty in optimal scheduling, the KDE method is applied to transform the uncertainty problem into a deterministic flexibility supply–demand balance problem. This transformation not only simplifies the problem’s complexity but also enhances the robustness and flexibility of the model.
- A distribution network optimal scheduling model considering aggregate distributed resources and uncertainty is developed. This model accounts for the aggregation characteristics of distributed resources as well as various uncertainty factors. Comparative analysis shows that the proposed method outperforms the box inner approximation aggregation optimization method and provides faster solutions than the original optimization approach, resulting in more scientifically grounded and reasonable scheduling outcomes.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Indices and Superscripts | |
| Index for time | |
| Index for units and aggregations | |
| Index for nodes in the distribution network | |
| Photovoltaic unit | |
| Energy storage unit | |
| Photovoltaic aggregation | |
| Energy storage aggregation | |
| Load | |
| Renewable energy | |
| Net load | |
| Superior grid | |
| Upward and downward flexibility | |
| Parameters | |
| PV prediction coefficient at time | |
| Maximum charging power and discharging power of ES unit , MW | |
| Maximum and minimum battery capacity of ES unit , MWh | |
| Original feasible region of the energy storage unit | |
| Photovoltaic prediction coefficient at time | |
| Assisted matrix for the derivation of Equation (23) | |
| Assisted parameter for the derivation of Equation (24) | |
| Assisted parameter for the derivation of Equation (24) | |
| Predicted active power of the PVA at time , MW | |
| Maximum and minimum charging power of ESA , MW | |
| Maximum and minimum battery capacity of ESA , MWh | |
| Maximum and minimum of the active power purchased from the regional grid, MW | |
| Maximum and minimum of the reactive power purchased from the regional grid, Mvar | |
| Resistance reactance of the branch , Ω | |
| Upper and lower limits of voltage, kV | |
| Maximum value of current, kA | |
| Assisted parameter for the derivation of Equation (41) | |
| Assisted parameter for the derivation of Equation (41) | |
| Variables | |
| AFR of PV and PVA | |
| Active power and reactive power of PV , MW, Mvar | |
| Active power, reactive power, and apparent power of PVA , MW, Mvar, MVA | |
| Charging power and discharging power of ES unit at time , MW | |
| Battery capacity of ES unit at time , MWh | |
| Charging and discharging power efficiencies of the ES unit | |
| Inner approximate feasible region of the energy storage unit | |
| Scaling and translating factors of the energy storage unit | |
| Active power, reactive power, and apparent power of ESA , MW, Mvar, MVA | |
| Active power of net load, load, and renewable energy at time , MW | |
| Upward and downward demand at time , MW | |
| Upward and downward supply–demand balances at time , MW | |
| Sum of the system’s flexibility upward and downward resources at time , MW | |
| Upward and downward supply of the ESA at time , MW | |
| Upward and downward supply of the grid at time , MW | |
| Active power of the ESA at time , MW | |
| Battery capacity of ESA at time , MWh | |
| Charging and discharging power factor of the ESA | |
| Active power of power purchased from the regional grid at time , MW | |
| PVA dispatch cost, ESA dispatch cost, and the power purchase cost of the regional grid, CNY 10⁴ | |
| Purchase price of active and reactive power | |
| Charging power and discharging power of ESA , MW | |
| Active and reactive power of node flowing to at time , MW, Mvar | |
| Active and reactive power injected by node at time , MW, Mvar | |
| Actual voltage of node and node at time , kV | |
| Set of nodes flowing into and out from , kV | |
| Current flowing between nodes , kA | |
Abbreviations
| PV | Photovoltaic |
| ES | Energy storage |
| AFR | Aggregate feasible region |
| PVA | Photovoltaic aggregation |
| ESA | Energy storage aggregation |
| KDE | Kernel density estimation |
Appendix A
References
- Çiçek, A.; Erdinç, O. Risk-averse optimal bidding strategy for a wind energy portfolio manager including EV parking lots for imbalance mitigation. Turk. J. Electr. Eng. Comput. Sci. 2021, 29, 481–498. [Google Scholar] [CrossRef]
- Wen, Y.; Hu, Z.; You, S.; Duan, X. Aggregate feasible region of DERs: Exact formulation and approximate models. IEEE Trans. Smart Grid 2022, 13, 4405–4423. [Google Scholar] [CrossRef]
- Taheri, S.; Kekatos, V.; Veeramachaneni, S.; Zhang, B. Data-driven modeling of aggregate flexibility under uncertain and non-convex device models. IEEE Trans. Smart Grid 2022, 13, 4572–4582. [Google Scholar] [CrossRef]
- Tiwary, H.R. On the hardness of computing intersection, union and Minkowski sum of polytopes. Discret. Comput. Geom. 2008, 40, 469–479. [Google Scholar] [CrossRef]
- Van Tu, T. Minimal representations of a face of a convex polyhedron and some applications. Acta Math. Vietnam. 2021, 46, 761778. [Google Scholar] [CrossRef]
- Wang, X. Tri-Level scheduling model considering residential demand flexibility of aggregated HVACs and EVs under distribution LMP. IEEE Trans. Smart Grid 2021, 12, 3990–4002. [Google Scholar] [CrossRef]
- Zhou, M.; Wu, Z.; Wang, J.; Li, G. Forming dispatchable region of electric vehicle aggregation in microgrid bidding. IEEE Trans. Ind. Informat. 2021, 17, 4755–4765. [Google Scholar] [CrossRef]
- Hu, J.; Wu, J.; Ai, X.; Liu, N. Coordinated energy management of prosumers in a distribution system considering network congestion. IEEE Trans. Smart Grid 2021, 12, 468–478. [Google Scholar] [CrossRef]
- Barot, S.; Taylor, J.A. A concise, approximate representation of a collection of loads described by polytopes. Int. J. Electr. Power Energy Syst. 2017, 84, 55–63. [Google Scholar] [CrossRef]
- Pertl, M.; Carducci, F.; Tabone, M.; Marinelli, M.; Kiliccote, S.; Kara, E.C. An equivalent time-variant storage model to harness EV flexibility: Forecast and aggregation. IEEE Trans. Ind. Informat. 2019, 15, 1899–1910. [Google Scholar] [CrossRef]
- Chen, X.; Dall’Anese, E.; Zhao, C.; Li, N. Aggregate power flexibility in unbalanced distribution systems. IEEE Trans. Smart Grid 2020, 11, 258–269. [Google Scholar] [CrossRef]
- Yan, D.; Ma, C.; Chen, Y. Distributed coordination of charging stations considering aggregate EV power flexibility. IEEE Trans. Sustain. Energy 2023, 14, 356–370. [Google Scholar] [CrossRef]
- Müller, F.L.; Szabó, J.; Sundström, O.; Lygeros, J. Aggregation and disaggregation of energetic flexibility from distributed energy resources. IEEE Trans. Smart Grid 2019, 10, 1205–1214. [Google Scholar] [CrossRef]
- Hreinsson, K.; Scaglione, A.; Alizadeh, M.; Chen, Y. New insights from the Shapley-Folkman lemma on dispatchable demand in energy markets. IEEE Trans. Power Syst. 2021, 36, 4028–4041. [Google Scholar] [CrossRef]
- Zhao, L.; Zhang, W.; Hao, H.; Kalsi, K. A geometric approach to aggregate flexibility modeling of thermostatically controlled loads. IEEE Trans. Power Syst. 2017, 32, 4721–4731. [Google Scholar] [CrossRef]
- Yi, Z.; Xu, Y.; Gu, W.; Yang, L.; Sun, H. Aggregate operation model for numerous small-capacity distributed energy resources considering uncertainty. IEEE Trans. Smart Grid 2021, 12, 4208–4224. [Google Scholar] [CrossRef]
- Mangasarian, O.L. Set containment characterization. J. Global Optim. 2002, 24, 473–480. [Google Scholar] [CrossRef]
- Hao, H.; Sanandaji, B.M.; Poolla, K.; Vincent, T.L. Aggregate flexibility of thermostatically controlled loads. IEEE Trans. Power Syst. 2015, 30, 189–198. [Google Scholar] [CrossRef]
- Vagropoulos, S.I.; Bakirtzis, A.G. Optimal bidding strategy for electric vehicle aggregators in electricity markets. IEEE Trans. Power Syst. 2013, 28, 4031–4041. [Google Scholar] [CrossRef]
- Habibifar, R.; Lekvan, A.A.; Ehsan, M. A risk-constrained decision support tool for EV aggregators participating in energy and frequency regulation markets. Elect. Power Syst. Res. 2020, 185, 0378–7796. [Google Scholar] [CrossRef]
- Liang, H.; Liu, Y.; Li, F.; Shen, Y. Dynamic economic/emission dispatch including PEVs for peak shaving and valley filling. IEEE Trans. Ind. Electron. 2019, 66, 2880–2890. [Google Scholar] [CrossRef]
- Majzoobi, A.; Khodaei, A. Application of microgrids in supporting distribution grid flexibility. IEEE Trans. Power Syst. 2017, 32, 3660–3669. [Google Scholar] [CrossRef]
- Fang, X.; Misra, S.; Xue, G.; Yang, D. Smart grid—The new and improved power grid: A survey. IEEE Commun. Surv. Tuts. 2012, 14, 944–980. [Google Scholar] [CrossRef]
- Yang, X.; Xu, C.; He, H.; Yao, W.; Wen, J.; Zhang, Y. Flexibility provisions in active distribution networks with uncertainties. IEEE Trans. Sustain. Energy 2021, 12, 553–567. [Google Scholar] [CrossRef]
- Niu, H.; Yang, L.; Zhao, J.; Wang, Y.; Wang, W.; Liu, F. Flexible-regulation resources planning for distribution networks with a high penetration of renewable energy. IET Gener. Transm. Distrib. 2018, 12, 4099–4107. [Google Scholar]
- Wang, Q.; Hodge, B.M. Enhancing Power System Operational Flexibility with Flexible Ramping Products: A Review. IEEE Trans. Ind. Inform. 2017, 13, 1652–1664. [Google Scholar] [CrossRef]
- Hardy, G.H.; Littlewood, J.E.; Pólya, G. Inequalities, Cambridge Mathematical Library, 2nd ed.; Cambridge University Press: Cambridge, UK, 1952; pp. 35880–35889. [Google Scholar]
- Zhang, M.; Xu, Y.; Shi, X.; Guo, Q. A Fast Polytope-Based Approach for Aggregating Large-Scale Electric Vehicles in the Joint Market Under Uncertainty. IEEE Trans. Smart Grid 2024, 15, 701–713. [Google Scholar] [CrossRef]
- Jia, H.; Zhu, X.; Cao, W. Distribution Network Reconfiguration Based on an Improved Arithmetic Optimization Algorithm. Energies 2024, 17, 1969. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PV Unit | Rated Power/kW |
|---|---|
| PV 1 | 100 |
| PV 2 | 200 |
| PV 3 | 300 |
| PV 4 | 400 |
| ES Unit | Rated Power/kW | Rated Capacity/kWh |
|---|---|---|
| ES 1 | 100 | 550 |
| ES 2 | 150 | 600 |
| ES 3 | 200 | 650 |
| Time | Time-of-Day Tariff Ratio/CNY/kWh |
|---|---|
| 00:00–05:00 | 0.3 |
| 05:00–09:00 | 0.6 |
| 9:00–12:00 | 0.9 |
| 12:00–16:00 | 0.6 |
| 16:00–20:00 | 0.9 |
| 20:00–24:00 | 0.6 |
| Flexibility | Optimization Cost | Computation Time |
|---|---|---|
| M1 > M2 > M3 | M3 > M2 > M1 | M1 > M2 > M3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, R.; Ye, R.; Zhang, Q.; Yu, P. A Day-Ahead Optimization of a Distribution Network Based on the Aggregation of Distributed PV and ES Units. Processes 2025, 13, 1803. https://doi.org/10.3390/pr13061803
Yu R, Ye R, Zhang Q, Yu P. A Day-Ahead Optimization of a Distribution Network Based on the Aggregation of Distributed PV and ES Units. Processes. 2025; 13(6):1803. https://doi.org/10.3390/pr13061803
Chicago/Turabian StyleYu, Ruoying, Rongbo Ye, Qingyan Zhang, and Peng Yu. 2025. "A Day-Ahead Optimization of a Distribution Network Based on the Aggregation of Distributed PV and ES Units" Processes 13, no. 6: 1803. https://doi.org/10.3390/pr13061803
APA StyleYu, R., Ye, R., Zhang, Q., & Yu, P. (2025). A Day-Ahead Optimization of a Distribution Network Based on the Aggregation of Distributed PV and ES Units. Processes, 13(6), 1803. https://doi.org/10.3390/pr13061803