1. Introduction
With the large-scale integration of renewable energy devices into the power grid, EHV DC transmission projects have been implemented to facilitate the consumption of renewable energy generated in the western and northern regions of China [
1,
2,
3]. For example, the renewable energy base in Jiuquan delivers electricity via the Jiuquan-Xiangtan ±800 kV EHV DC transmission project [
1], and the renewable energy base in Xinjiang delivers electricity through the Jundong-Wananan ±1100 kV EHV DC transmission project [
2]. As a result, systems that include SGs, VSCs, and LCC-HVDC transmission are now common in China. However, the DC transmission sending-end system, which is connected to large-scale, centralized renewable energy generation, often experiences dynamic stability issues [
3]. Since the mechanisms behind these stability problems are still unclear, they pose a threat to the safe and stable operation of the large-scale power system. One of the main objectives of a power system is to transmit power [
4]. This means that various grid-connected devices should convert different forms of primary energy inputs (e.g., mechanical energy, solar energy, wind energy) into electricity; then, electrical power is delivered through the power grid as alternating voltages and currents. Therefore, power theory intrinsically forms the foundation of power system analysis and inherently affects explanations of dynamic behaviors and stabilization mechanisms in large-scale systems. Overall, there is an urgent need to establish a comprehensive understanding of the generation mechanisms of active and reactive power, as well as their characteristics across SGs, VSCs, and LCCs during the dynamic processes of AC power systems.
Numerous power theories have been proposed in the literature [
5,
6,
7]. The traditional understanding of active and reactive power can be categorized into two main frameworks: the classical sinusoidal steady-state power theory and the power theories under non-sinusoidal conditions [
5]. The classical sinusoidal steady-state power theory applies specifically to circuits operating under sinusoidal steady-state conditions. In contrast, power theories under non-sinusoidal conditions can be broadly classified into three categories: (1) Frequency-domain-based theories, first introduced by Budeanu in 1927, approach the problem from a harmonic perspective using the Fourier series as the mathematical foundation. However, because the Fourier series can only describe periodic steady-state waveforms, this class of theories is inherently limited to steady-state system analysis [
6]. (2) Time-domain-based theories, initially proposed by Fryze in 1932, also apply only to steady-state systems. Although these methods avoid frequency-domain decomposition, they still rely on averaging or RMS calculations to determine active and reactive power, thus restricting their use to steady-state conditions [
7]. (3) The instantaneous reactive power theory, first proposed by Akagi et al. in 1983, has been widely adopted for generating reference signals in harmonic compensation applications [
8,
9]. While effective in mitigating harmonic distortions, this theory also relies on the Fourier series to represent instantaneous voltage and current in circuits containing harmonics.
Thus, the current understanding of active/reactive power is primarily limited to steady-state conditions. Power theory research methodologies predominantly rely on mathematical definitions and the Fourier series, confining their applicability mainly to steady-state systems. For instance, the instantaneous reactive power theory defines active/reactive power using mathematical formulations based on the dot/cross product of voltage and current rotating vectors [
8]. This theory ultimately generates command signals for compensating harmonic currents [
9]. It employs the Fourier series to describe the AC voltage and current of each phase, enabling the analysis of power phenomena in circuits containing harmonics, but not for the dynamic processes. Thus, existing power theories are primarily suited for the periodic and steady-state systems [
10]. They lack sufficient consideration for system dynamics and are not well suited for analyzing time-varying or transient behaviors.
In current power system analyses, such as scenarios involving low-frequency oscillations, active and reactive power characterizations often rely on the phasor method [
4]. Phasors portray the relationship between the active/reactive power output from generators and amplitude, as well as the phase difference of each internal voltage. However, since the phasor is used to describe a standard sinusoidal signal [
11], the above relationship is actually a steady-state relationship. Some other studies are based on the dynamic phasor method, which uses a Fourier series with time-varying amplitude and phase to represent the AC signals in dynamic processes [
12]. However, as previously discussed, the Fourier series is limited to periodic signals and struggles to characterize non-stationary, non-periodic signals in dynamic processes. In conclusion, the above-mentioned works also lack a comprehensive physical understanding of active and reactive power in dynamic processes.
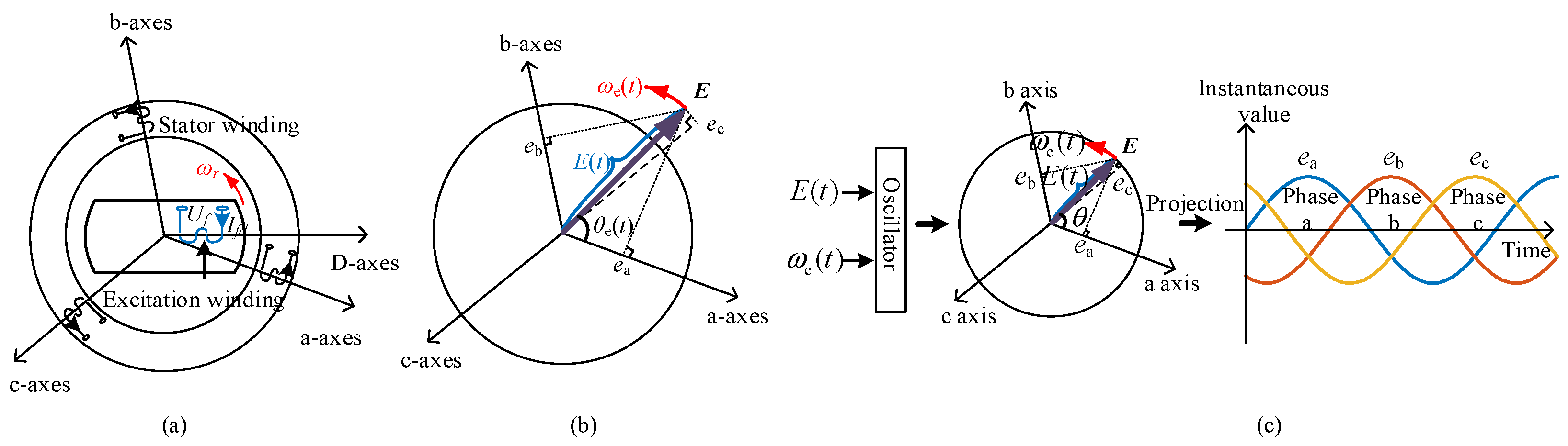
In dynamic processes, the AC voltage and frequency level of the power system are jointly established by all grid-connected devices, and, thus, all grid-connected devices must necessarily possess the ability to regulate the amplitude/frequency of their internal voltages based on the active/reactive power [
13,
14]. The power conversion on the AC and DC sides of the converter is briefly introduced as follows: On the DC side, the converter handles DC current, voltage, and power. Under certain switching pulse signals of the converter, AC current, voltage, and active/reactive power on the AC side can be handled by the conduction and shutdown of six switching tubes. In new-type power systems, different grid-connected devices generate AC electrical signals using different modulated methods. For example, SG adopts continuous modulation to produce a basic sinusoidal AC voltage in steady-state conditions. VSC adopts the PWM control technique to produce AC values, while LCC adopts a simple square-wave modulation control technique to produce AC values. In dynamic processes, AC voltages and currents at the outlets of different grid-connected devices are exhibited as time-varying amplitude/frequency signals, instead of harmonics [
10,
15]. Thus, the instantaneous value of each phase of the AC system can be characterized by the time-varying amplitude/frequency rotating vector [
10]. Building on this, the authors of [
15] discussed the separation mechanism of active/reactive power components specifically for VSC grid-connected devices using SPWM signal modulation. However, ref. [
15] did not explore the separation mechanism of active/reactive power for other types of grid-connected devices. To address stability challenges in systems comprising SGs, VSCs, and LCC-HVDC transmission, it is necessary to understand the generation mechanisms of active and reactive power, as well as their characteristics across these devices during the dynamic processes of AC power systems.
Consequently, this paper extends the work of [
15] by using time-varying amplitude/frequency rotating vectors to describe different AC signals, exploring the separation mechanisms of active/reactive power under continuous, SPWM, and simple square-wave modulation for the SG, VSC, and LCC. The aim is to compare and analyze their characteristics, thereby clarifying the physical generation mechanisms of active/reactive power in the dynamic processes of systems containing different grid-connected devices. Additionally, in terms of practicality, the findings of this paper can provide physically grounded insights for power calculation methods and offer guidance for the design of power measurement in actual power system dynamic processes.
The structure of this paper is organized as follows:
Section 2 introduces the basic working principles and corresponding time-varying amplitude/frequency rotating vectors of SG, VSC, and LCC, as the foundation.
Section 3 explores the active/reactive power separation mechanisms for different signals modulated power devices.
Section 4 further explains the separation characteristics of active/reactive components in different devices. These mechanisms and characteristics are also verified through the time-domain simulations in
Section 4.
Section 5 discusses the theoretical and practical contributions of this paper. Finally,
Section 6 provides a concluding summary for the entire paper.
3. Active/Reactive Power Separation Mechanisms for Different Signals Modulated Power Devices
In the previous section, the dynamic characteristics of voltage and current were explored for three different signals modulated power devices, which are SG, VSC, and LCC. The amplitude/frequency behind their AC outputs varies over time in dynamic processes. Specifically, SG produces a continuous time-varying amplitude/frequency signal, while VSC and LCC produce discrete time-varying amplitude/frequency signals. Building upon this foundation, this section will discuss the active/reactive power separation mechanisms for different signals modulated power devices.
3.1. Active/Reactive Power Separation Mechanism for SG
Indeed, the instantaneous power of each phase, formed by the multiplication of the instantaneous voltage and current of each phase, inevitably contains both active and reactive power components due to the phase difference between voltage and current. In the case of SG, the electromagnetic power on the rotor represents active power. This electromagnetic power is equal to the product of mechanical torque and rotational speed. This power is converted from primary energy and externally supplied, as it performs actual work. In addition, the remaining part of the electrical power in the AC system circulates among the three phases, and this represents reactive power. Reactive power does not need an external supply and does not reach the rotor side, and, thus, it does not perform work for the overall three phases.
Figure 6 illustrates the orthogonal decomposition of the time-varying amplitude/frequency rotating vector of the AC-side current along the time-varying amplitude/frequency rotating vector of voltage. This decomposition clearly shows that the AC-side current can be divided into two components: the current vector in-phase with the voltage vector and the current vector orthogonal to the voltage vector, as shown in
Figure 6a. Then, the current vector in-phase with the voltage projects onto stationary coordinate axes and forms the active current of each phase, while the current vector orthogonal to the voltage vector projects onto stationary coordinate axes and forms the reactive current of each phase, as depicted in
Figure 6b. The instantaneous active/reactive power components of each phase are obtained by multiplying the instantaneous voltage of each phase by the active/reactive current of each phase. As mentioned earlier, the sum of the instantaneous active power components of each phase is nonzero, representing the actual electrical power performing work. For SG, this active power component exactly equals the electromagnetic power. Meanwhile, the sum of instantaneous reactive power components of each phase is zero, indicating that although reactive power is present in each individual phase, it does not contribute to performing actual work by the overall three-phase system. As a result, through the orthogonal decomposition shown in
Figure 6, one can intuitively understand and calculate the active/reactive current components of each phase and the corresponding instantaneous active/reactive power components.
3.2. Active/Reactive Power Separation Mechanism for VSC
VSC can also achieve a natural separation of the active and reactive components. The principle is derived as follows.
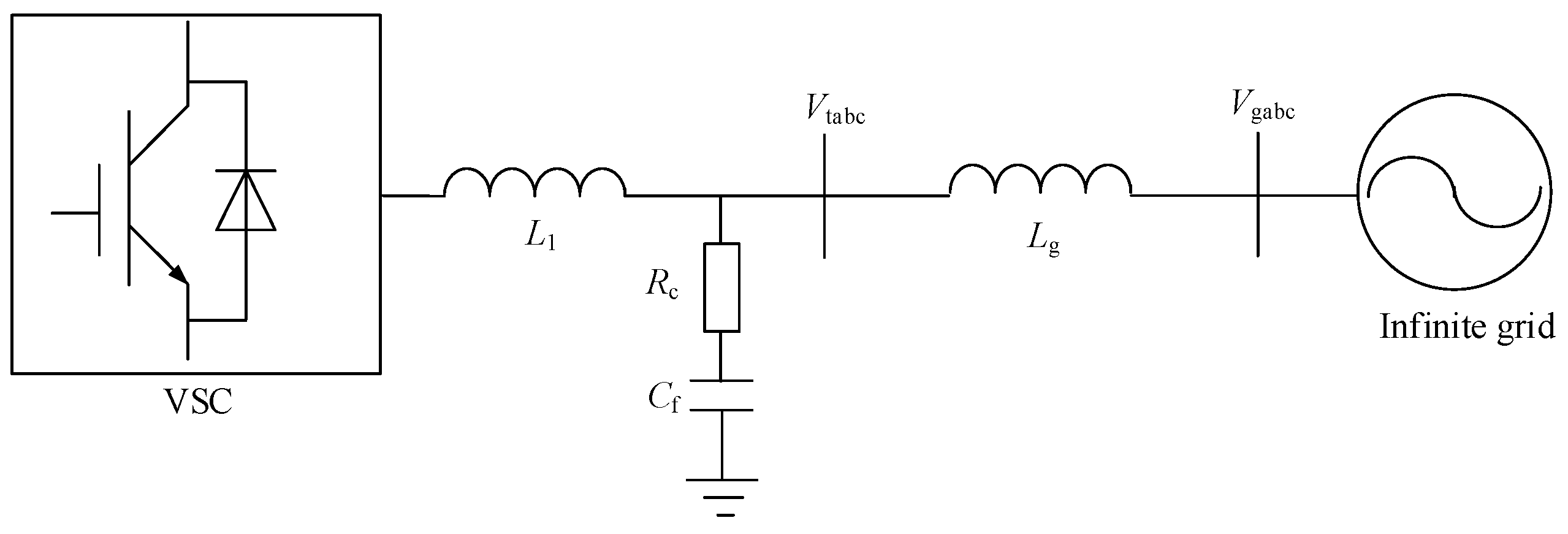
Under the constraints of circuit structure, the relationship between the current of the AC and DC sides can be described by the switching functions. The switching functions describe the conductive mode of the six bridge arms. For example, for phase a,
Sa = 1 indicates that the upper bridge arm is conducting, and
Sa = 0 indicates that the lower bridge arm is conducting. Then, the relationship between the current of AC/DC side can be expressed as follows:
Similarly, the relationship between the voltage of the AC/DC side can also be described by the switching functions. For convenience, the negative bus of the DC side can be taken as the 0 voltage reference point. Then, the relationship between the voltage of the AC/DC side can be expressed as follows:
Combining (5) and (6), the DC current can be expressed as follows:
Furthermore, (7) can be expressed in the form of the dot product of the vectors of AC voltage and current, as follows:
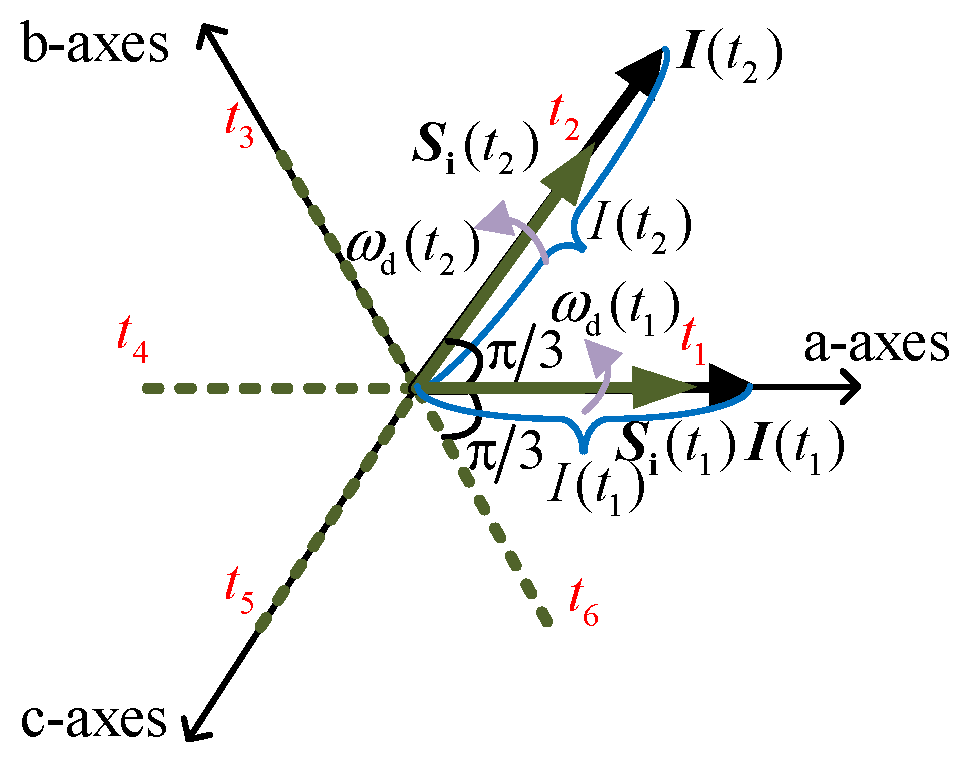
As seen from (8), the active current that is in-phase with the conductive pulse (or with the three-phase AC voltage rotating vector), denoted as
IP of its amplitude, will flow to the DC side and form the DC bus current. As mentioned earlier, through modulation, the AC current is averaged over the carrier period. In the case of VSC, the three-phase AC currents are modulated by conductive pulses and then form the DC current. However, the reactive current, which is orthogonal to the conductive pulse (or the three-phase AC voltage rotating vector), will not flow to the DC side. Therefore, VSC can naturally separate the active/reactive components by modulating the three-phase AC current based on conductive pulses. Additionally, VSC can also perform the orthogonal decomposition shown in
Figure 6, and this allows the determination of active/reactive current in each phase accordingly.
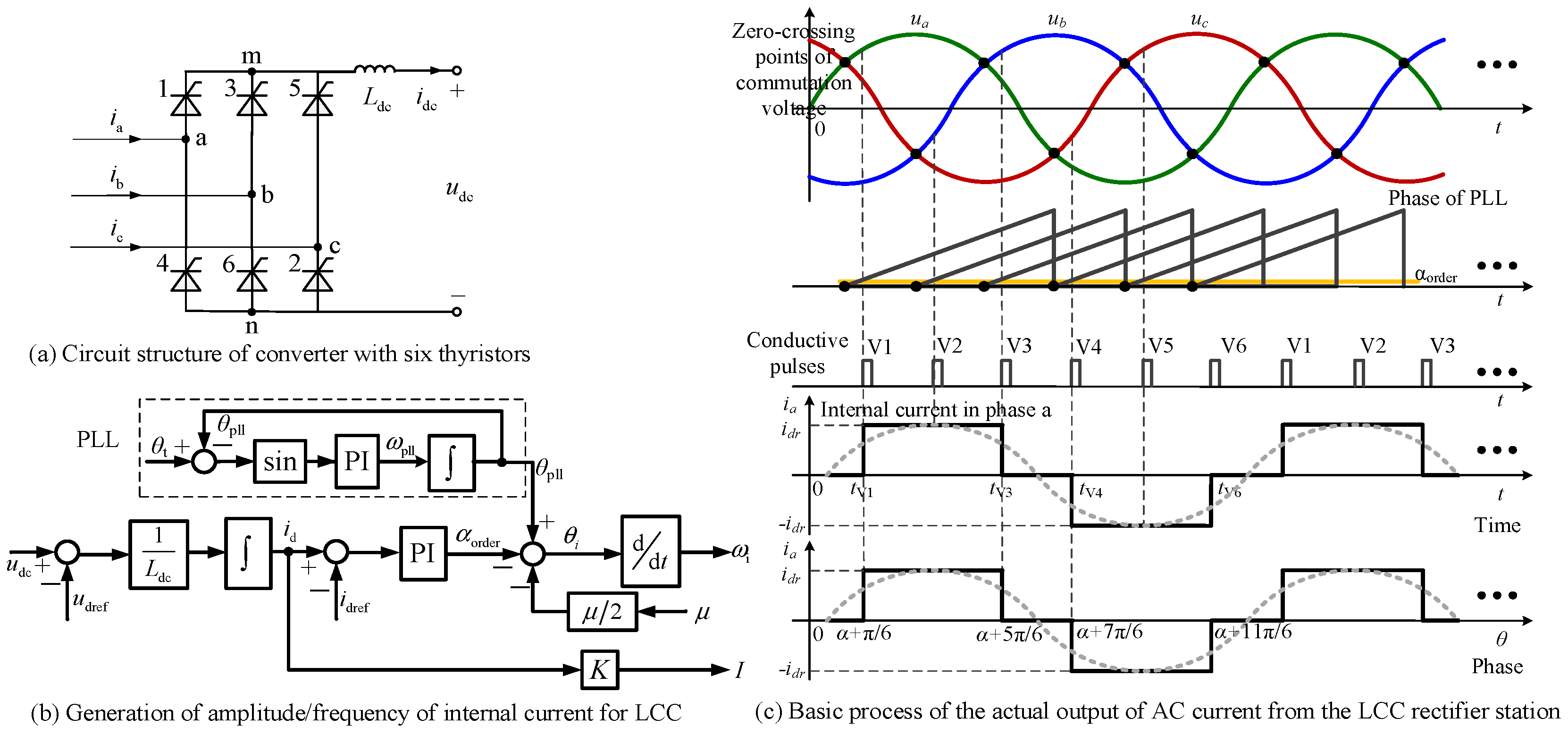
3.3. Active/Reactive Power Separation Mechanism for LCC
Similarly to VSC, LCC can also achieve the natural separation of active/reactive components. The principle is introduced next.
According to the working principle of LCC, the DC voltage can be represented using the AC line voltages and the corresponding switching functions, as follows [
17]:
where
vab,
vbc, and
vca are the AC line voltages in the three-phase system, and
Sline_ab,
Sline_bc, and
Sline_ca are the switching functions corresponding to the line voltages.
Taking
Sline_ab as an example, with
α as the actual firing angle,
Sline_ab can be expressed as follows:
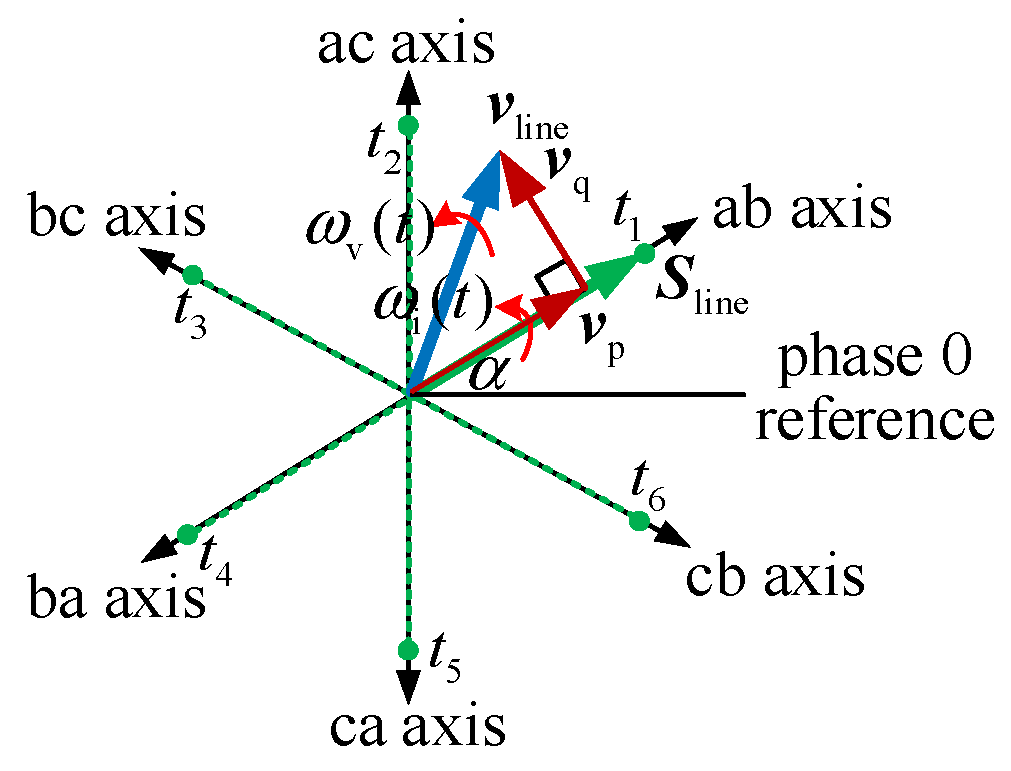
The rotating vector of switching functions corresponding to the line voltages can be represented as
Sline, as shown in
Figure 7. As previously mentioned, conductive pulses are fired in the order of ab, ac, bc, ba, ca, and cb, with
t1~
t6 representing the firing times. The interval is π/3 radians. The rotating vector of the AC line voltage, denoted as
vline, can also be drawn in
Figure 7. According to (9), the DC voltage can be expressed as the dot product of the rotating vectors of the AC line voltage and the conductive pulse, as follows:
Then, as shown in (11) and
Figure 7, after averaging over the square wave period, the AC line voltage vector component that is in-phase with the rotating vector of conductive pulse, denoted as
VP, of its amplitude, will reach the DC side and form the DC voltage. This voltage component corresponds to the active voltage. Through modulation of LCC, the AC line voltage is averaged over the square wave period. In the case of LCC, the three-phase AC-side line voltages are modulated by the conductive pulses and then form the DC voltage. Meanwhile, the AC line voltage vector component that is orthogonal to the conductive pulse rotating vector will not reach the DC side. Therefore, by modulating the three-phase AC line voltages with conductive pulses, LCC can also naturally separate the active/reactive components.
5. Discussion
Current power theories generally characterize active/reactive power, especially reactive power, through mathematical definitions [
5]. As a result, they fail to capture the physical implications of active/reactive power. For example, the popular instantaneous reactive power theory is a practical theory for dealing with the harmonics [
8,
9]. This calculation method applies to periodic steady-state systems containing harmonics. The time-varying AC voltages and currents it deals with are time-varying periodic signals described in terms of a Fourier series. In addition, the physical meaning of the instantaneous reactive power given in this method is still not clear [
18]. In this paper, the physical meanings of active/reactive power are clearly explained through the physical AC-DC conversion process of converters. Additionally, this paper focuses on dynamic system processes, where the time-varying amplitude/frequency signals can include both periodic and non-periodic AC quantities. Thus, the instantaneous reactive power theory could be viewed as a special case of this paper, to some extent. This paper mainly explores the generation mechanisms of the active/reactive power in system dynamics. Through the work in this paper, the three-phase equipment (including SG, VSC, and LCC) can naturally separate the active and reactive components in a three-phase AC system. The separation mechanisms of the three-phase equipment coincide with the inherent properties of active/reactive power, which are indispensable for a rational understanding of the physical concept of active/reactive power. The dynamic analysis, measurement, and control of the active/reactive power all require a rational understanding of the physical concept of active/reactive power.
Grid-connected devices regulate the frequency/amplitude of internal voltages by directly sensing or measuring the active/reactive power (or current), thereby controlling the active/reactive power injected into the system. For each grid-connected device, it is essential to provide pathways for the active/reactive components in three-phase power systems. However, the academic community has yet to place sufficient emphasis on the power generation mechanisms during system dynamic processes. To address this issue, this paper investigates the separation mechanisms and characteristics of active/reactive power for different signals modulated power devices during system dynamic processes.
Practically speaking, previous research in [
15] has proposed expressions for calculating active/reactive power in three-phase AC system dynamics under time-varying amplitude/frequency signals. However, ref. [
15] investigated the separation mechanism of active/reactive power only in the VSC grid-connected systems. It is important to note that the mathematical representations of active/reactive power in previous research [
15] and this paper, the instantaneous reactive power calculation method, and the traditional sinusoidal steady-state power calculation method, are all consistent in form. The representations of active/reactive power are as follows:
Since previous research in [
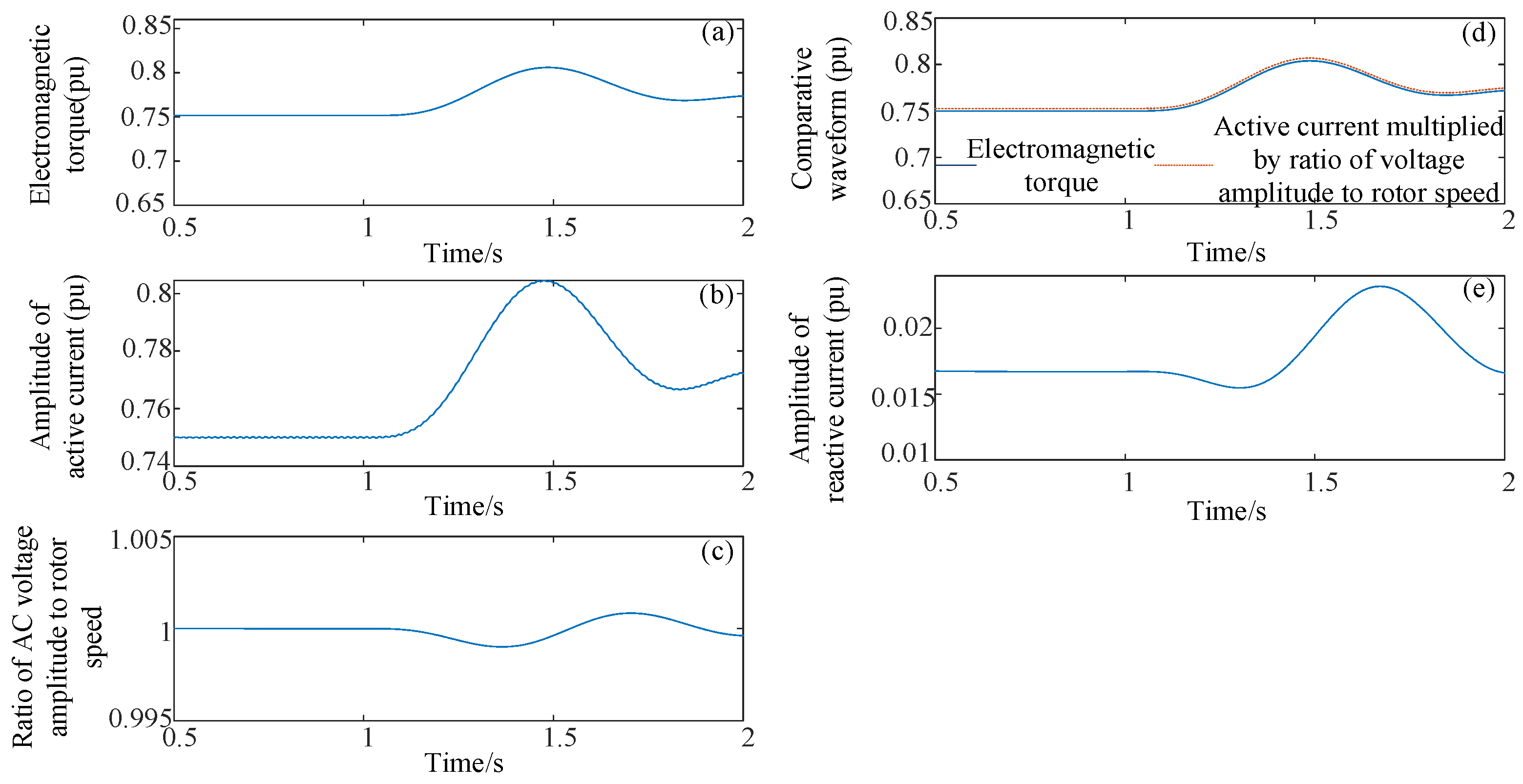
15] has not yet discussed conditions under the continuous and the square-wave signals modulation forms, it can be seen that this paper represents a further deepening of previous findings, aiming to expand applicability to broader domains. More importantly, the work in this paper lays a foundation for power measurement in systems comprising SGs, VSCs, and LCC-HVDC transmission, providing physically grounded insights into dynamic processes. The findings of this paper also indicate that the analysis, measurement, and control of the active/reactive components in renewable energy equipment based on the instantaneous reactive power calculation method or the traditional sinusoidal steady-state power calculation method do not need to be updated. However, the other methods may need to be amended according to the representations of the active/reactive power in Equations (12) and (13). Active power can be calculated using the three-phase instantaneous values, as shown in (12). According to the simulation results in
Figure 9d, for the SG, the torque equals the product of the active current and voltage divided by the rotational speed. Since the product of torque and speed represents the active power, Equation (12) for an SG essentially corresponds to the product of torque and rotational speed. The active current is the in-phase component of the current with respect to the voltage, while the quadrature component is the reactive current, as shown in
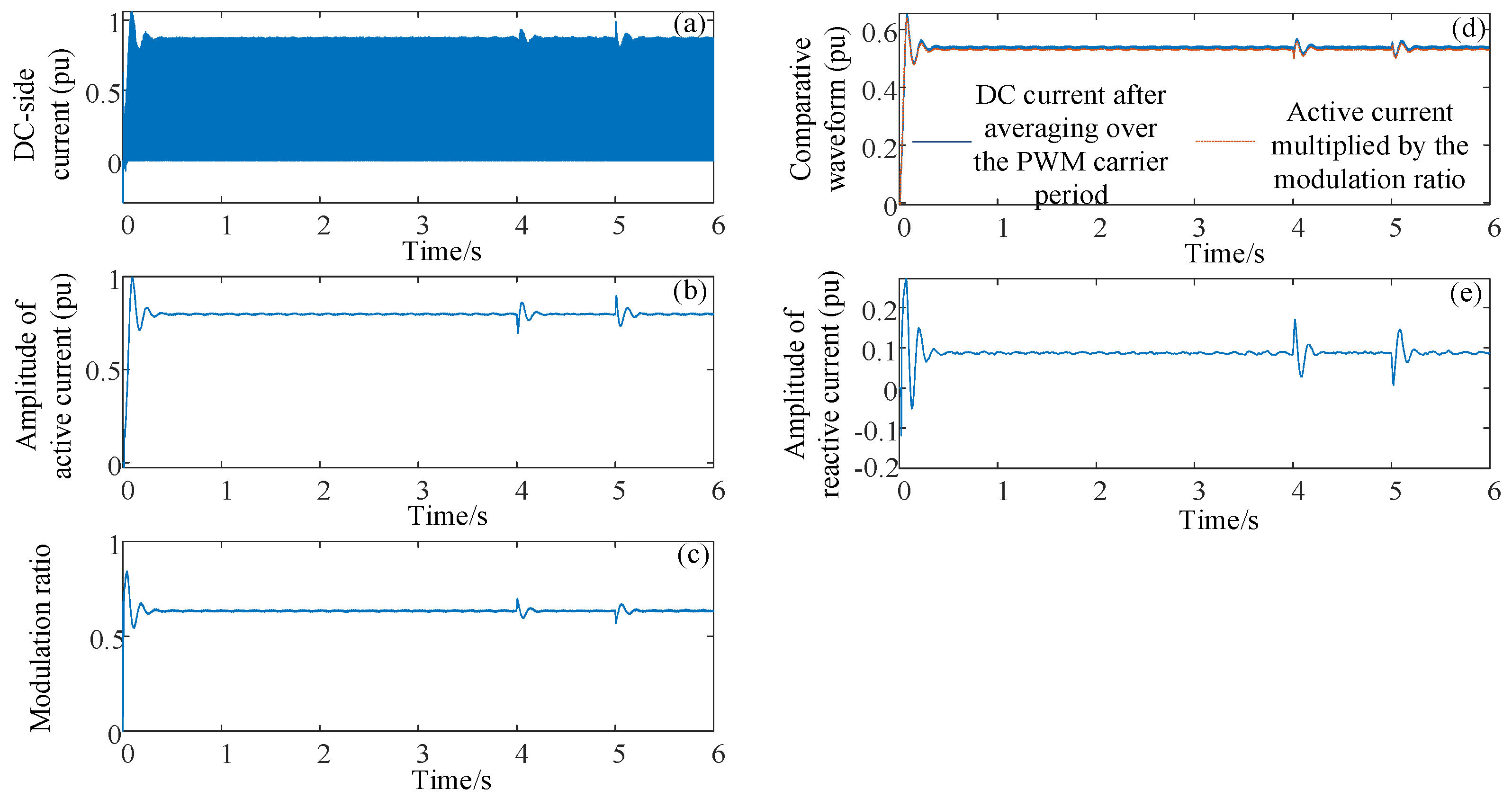
Figure 9e. Reactive power can be calculated as the product of the reactive current and the voltage amplitude. Equivalently, it can also be computed from the three-phase instantaneous values, as shown in (13). For the VSC, as shown in
Figure 11d, the average value of the DC current over a PWM carrier period equals the product of the active current and the modulation ratio. Since the product of DC current and DC voltage represents the active power, Equation (12) for the VSC effectively corresponds to the product of the average DC current (over the PWM carrier period) and the DC voltage. The quadrature component of the current with respect to the voltage is the reactive current, as illustrated in
Figure 11e. Reactive power is calculated as the product of reactive current and voltage amplitude. For the VSC, this reactive component circulates among the six switching devices and is physically present. Equivalently, it can also be calculated from the three-phase instantaneous values, as described by (13). For the LCC, based on the simulation results shown in
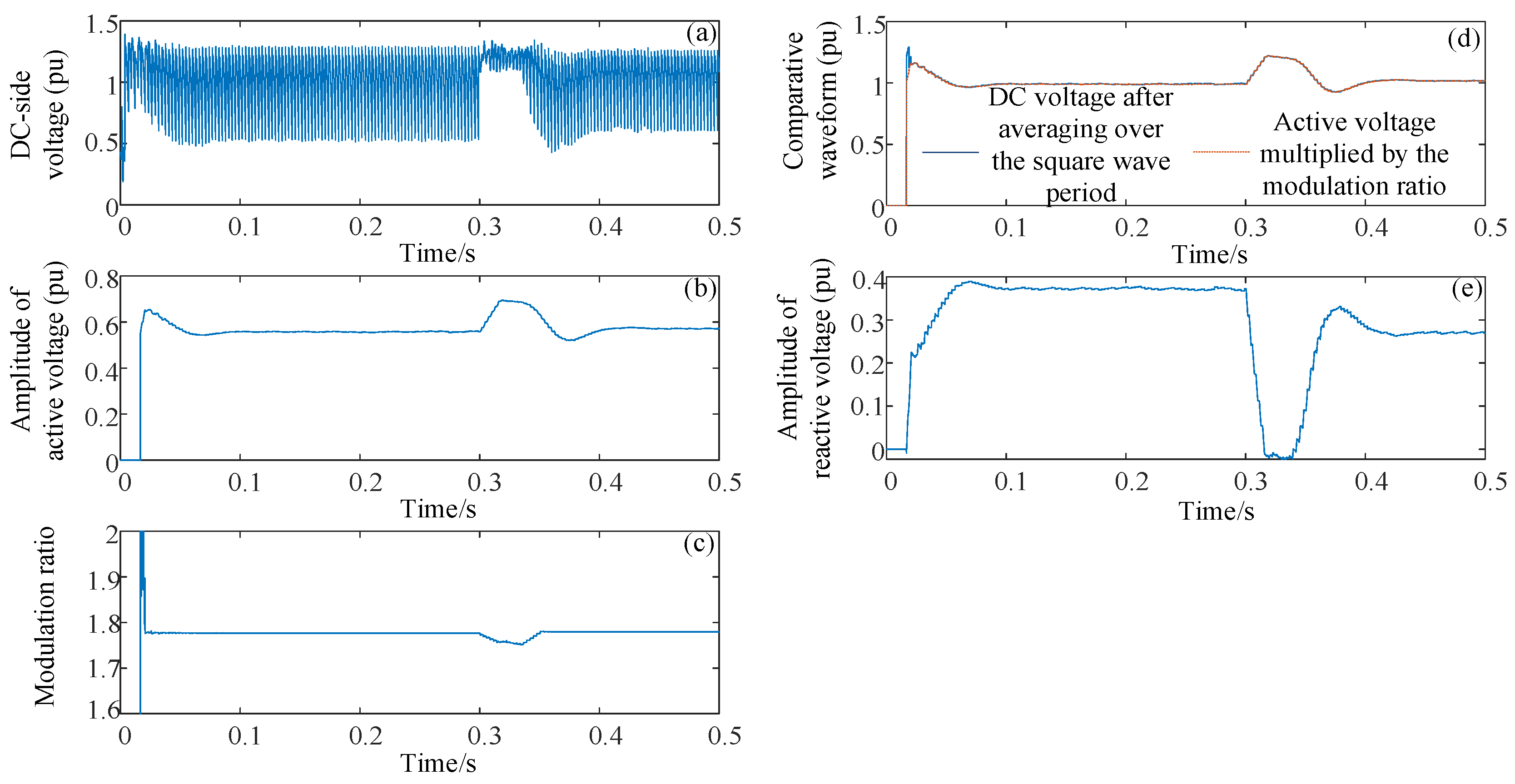
Figure 13d, the average value of the DC voltage over the square-wave carrier period equals the product of the active voltage and the modulation ratio. Since the product of DC voltage and DC current represents the active power, Equation (12) for the LCC likewise corresponds to the product of the average DC voltage (over the square-wave period) and the DC current. The voltage component orthogonal to the current is the reactive voltage, as shown in
Figure 13e. In summary, through the analysis presented in this study, the physical meanings of Equations (12) and (13) for calculating active and reactive power are clearly and explicitly demonstrated.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}