1. Introduction
Ultra-low frequency, whose oscillation frequency (ULFO) is under 0.1 Hz, is an instability issue. This phenomenon is reported in Yunnan, Manitoba, Nordic power systems [
1,
2,
3], and so on. The common point of these oscillation incidents is that the power systems have a high penetration of hydro turbines. The water hammer effect is considered the root cause of ULFO. Extensive efforts have been put into solving this problem. Reference [
4] proposed a small-signal model for ultra-low frequency oscillations in hydroelectric units, and mechanistically analyzed the impacts of excitation regulation and a power system stabilizer (PSS) on ultra-low frequency oscillations in the system, identifying key influencing factors. Reference [
5], through an analysis of hydro turbine governor damping characteristics, indicated that an excessively low ratio between proportional and integral parameters in governors could easily induce ultra-low frequency oscillations. Reference [
6] examined the influence of governor dead-zone settings on ultra-low frequency oscillations. Reference [
7] investigated the mechanism by which hydroelectric unit governor systems provide negative damping during oscillations, identifying governor parameters and water hammer effects as primary causes of oscillation induction.
These studies conducted modal analysis and influence factor investigations on ultra-low frequency oscillation issues in traditional power systems. Building upon this foundation, numerous studies have explored suppression measures for low-frequency oscillations in conventional power systems. Reference [
8] suggested that ultra-low frequency oscillations could be suppressed by adjusting hydro turbine governor parameters, proposing a parameter design method based on structured singular value theory. Reference [
9] developed an ultra-low frequency oscillation suppression method using governor additional damping control (GPSS). Reference [
10] proposed a wide area detection method to adjust the operation mode of the governor of hydraulic turbines, and the governor can be disabled when necessary. Reference [
11] proposed a proportional-resonant and lead–lag series power system stabilizer and utilized a deep reinforcement learning method to realize the parameter setting. Reference [
12] employed a frequency-band partitioning control concept, extending the ultra-low frequency control range by adding low-pass branches to conventional PSS, thereby constructing a novel PSS control structure for ultra-low frequency oscillation suppression. It also proposed a robust parameter tuning algorithm considering frequency-band settings and system operational condition variations. Through an analysis of ultra-low frequency oscillation phenomena in a DC island system within the Yunnan Power Grid after asynchronous interconnection, a coordinated control method between governor systems and DC frequency controllers was presented.
With the continuous construction of renewable energy generation (REG), the stability characteristic has undergone significant evolution [
13]. For ULFO issues, it is important to consider the impact of REG. Reference [
14] investigated modeling and stability analysis of ultra-low frequency oscillation issues in wind-integrated power systems based on the conclusion of approximately unified system-wide frequency in ultra-low frequency bands and then constructed a unified frequency model for wind-integrated power systems. Reference [
15] investigated the impact mechanism of inertia-controlled wind power on ultra-low frequency oscillations through small-signal modeling and root locus analysis while analyzing the influence of patterns of wind power parameters on such oscillations. Reference [
16] investigated the operational mechanisms of different frequency control strategies on prime mover system damping variations and their impacts on frequency stability using damping torque analysis. However, the modeling only considered wind power frequency response components, omitting research on other electromechanical parts. Except for wind generation, photovoltaic generators can also be employed to suppress the ULFO by adding a lead–lag section in its control loop [
17]. From these works, it can be concluded that REG can have a significant impact on the ULFO in hydro power systems.
However, since REG deeply influences the stability mechanism of the power system, it is unclear whether ULFO will exist in thermal power systems. In recent years, some ULFOs have occurred in systems with thermal power and wind power generation [
18,
19]; thus, this issue needs to be studied. This paper innovatively discovered that doubly-fed induction generators (DFIG) with d
f/dt virtual inertia control can induce ULFO in thermal power generation systems. By applying the average system frequency (ASF) model, a clear explanation is brought out. The main contribution of this paper is as follows:
- (1)
The properties of the DFIG are depicted by the motion equation model, which can reasonably reflect the impact of controllers within the electromechanical timescale.
- (2)
Based on the cognition that frequency waveforms are approximately equal during the ULFO process, a simplified analytical model is proposed by combining the motion equation model and the ASF model.
- (3)
The ULFO mechanism is revealed through the perspective of the impact of DFIG equivalent inertia on system inertia.
- (4)
The impact of key parameters on stability is analyzed through frequency domain characteristics.
The rest of this paper is organized as follows. In
Section 2, the structure of the thermal power generator and the DFIG is introduced, and the motion equation models are established. In
Section 3 the system model is constructed, and frequency domain analysis is conducted. The analysis is verified through simulation in
Section 4, and the conclusions are drawn in
Section 5.
2. Modeling of Generators
To investigate the studied issue, the model of the steam turbine-based synchronous generator and the doubly-fed induction generator should be established.
- (a)
The model of the synchronous generator (SG)
The entire thermal power plant consists of a synchronous generator, an excitation system, a governor, and a reheat turbine. Since the voltage regulation is a local control, and the frequency variation in the whole system is approximately the same, the excitation system is neglected in the modeling process. The block diagram of the governor and the steam turbine is shown in
Figure 1a,b.
Neglecting the impact of the dead band and limiter, the transfer function of the governor is
The transfer function of the steam turbine is
Denoting the inertia of the rotor by
H, the motion equation model of the SG is
- (b)
The model of the DFIG
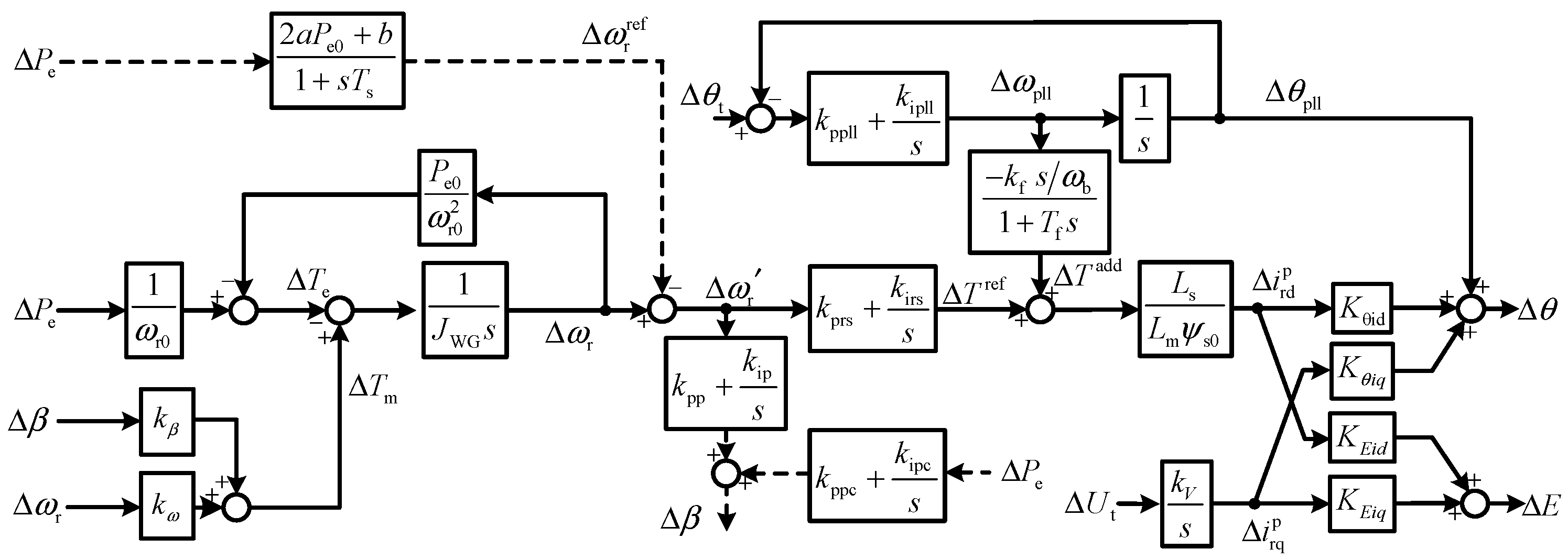
A DFIG is a complex piece of equipment combining both mechanical and electrical sections. The characteristics of the frequency band, maximum power point tracking (MPPT), rotor, pitch control, pitch compensation control, PLL, and terminal voltage control are preserved, while the dynamics of the current controller and the grid-side converter are ignored.
The MPPT relationship can be written as
=
+
bPe +
c, where
is the rotor speed reference value and
Pe is the stator electromagnetic power, and the linearized form of the MPPT section is
where
Ts is the time constant of the MPPT low-pass filter, and the subscript 0 represents the steady-state value.
When the wind speed is constant, the rotor dynamics can be represented by the following equation:
where Δ
β is the pitch angle,
ωr is the rotor speed,
JWG is the rotor inertia, and
kβ and
kω are derived from the aerodynamic function of the wind turbine.
Denoting the proportional and integral parameter of the phase-locked loop (PLL) by
Kppll and
Kipll, the actual phase of the terminal voltage by
θt, the frequency and phase output by the PLL by
ωpll and
θpll, the linearized form of the PLL can be expressed as
The d
f/dt controller has been proposed to enhance the inertial response of REG [
20]. Denoting the inertia and time constant of the d
f/dt controller by
kf and
Tf, the additional torque by
Tadd, and the nominal angular frequency of the power system by
ωb, the linearized function of the d
f/dt controller can be expressed as
Denoting the PI parameter of the speed controller by
kprs and
kirs, the PI parameter of the pitch controller by
kpp and
kip, and the PI parameter of the pitch compensation controller by
kppc and
kipc, the linearized functions of the three controllers are
where
Tp is the time constant of the pitch controller low-pass filter.
Since the dynamics of the current controller are ignored, the current references are regarded as equal to their actual values. Denoting the integral parameter of the terminal voltage control by
kV, the stator and mutual inductance by
Ls and
Lm, and the stator flux by
ψs, the dq-axis current can be calculated as follows:
where
Ut is the amplitude of the terminal voltage, and the superscript p represents quantities in the PLL reference frame.
Similar to the SG, the interface of the DFIG to the grid is the internal voltage. Denoting the mutual reactance by
Xm, the internal voltage
Ed +
jEq can be expressed by (11) according to reference [
21].
The relationship between the rotor currents and the amplitude/phase of the internal voltage is algebraic, and is written as follows:
where
Kθid,
Kθiq,
KEid, and
KEiq are linearization coefficients.
Combining (4)~(12), the linearized model of the DFIG is established, as shown in
Figure 2.
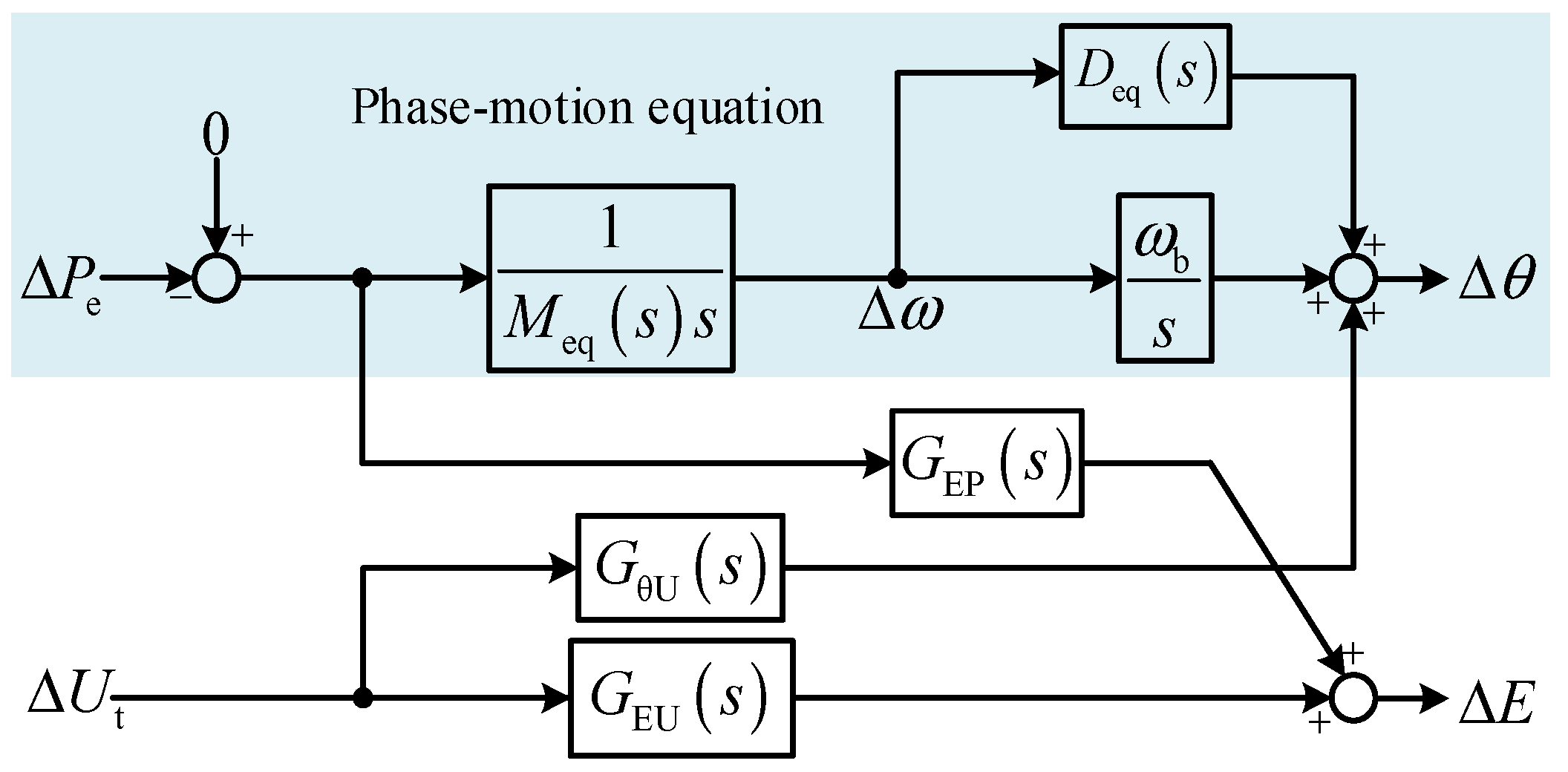
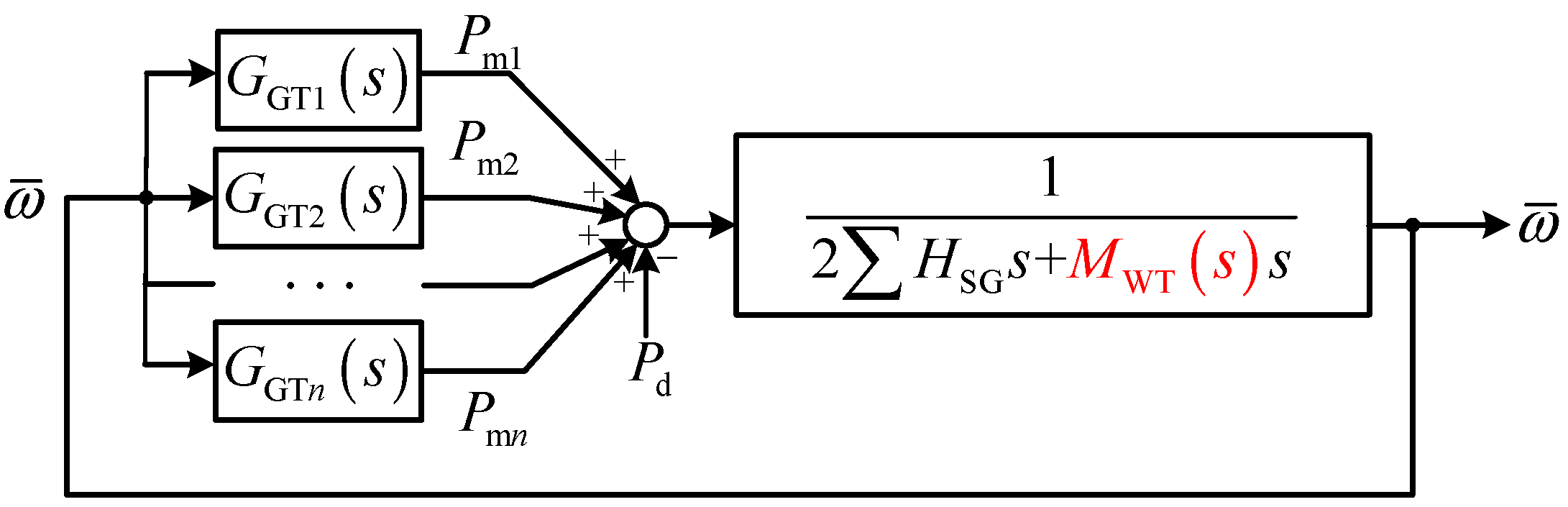
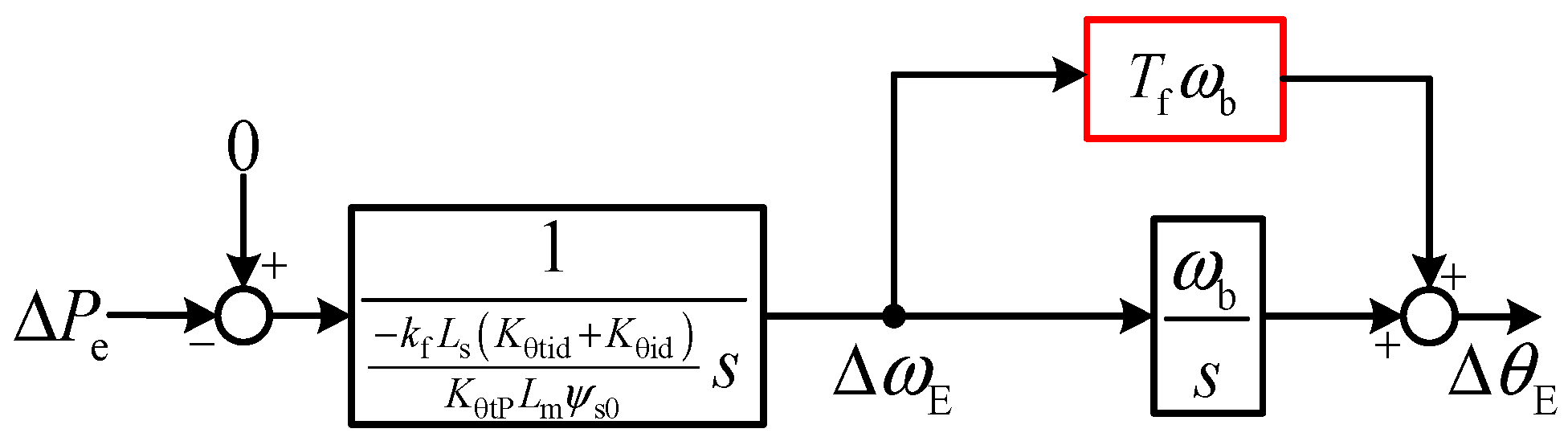
The linearized model of the DFIG can be reorganized in a form similar to the model of the SG [
22,
23]. To simplify the description, the motion equation model of the DFIG is directly given, as shown in
Figure 3.
Meq(
s) and
Deq(
s) are called the equivalent inertia and damping of the DFIG.
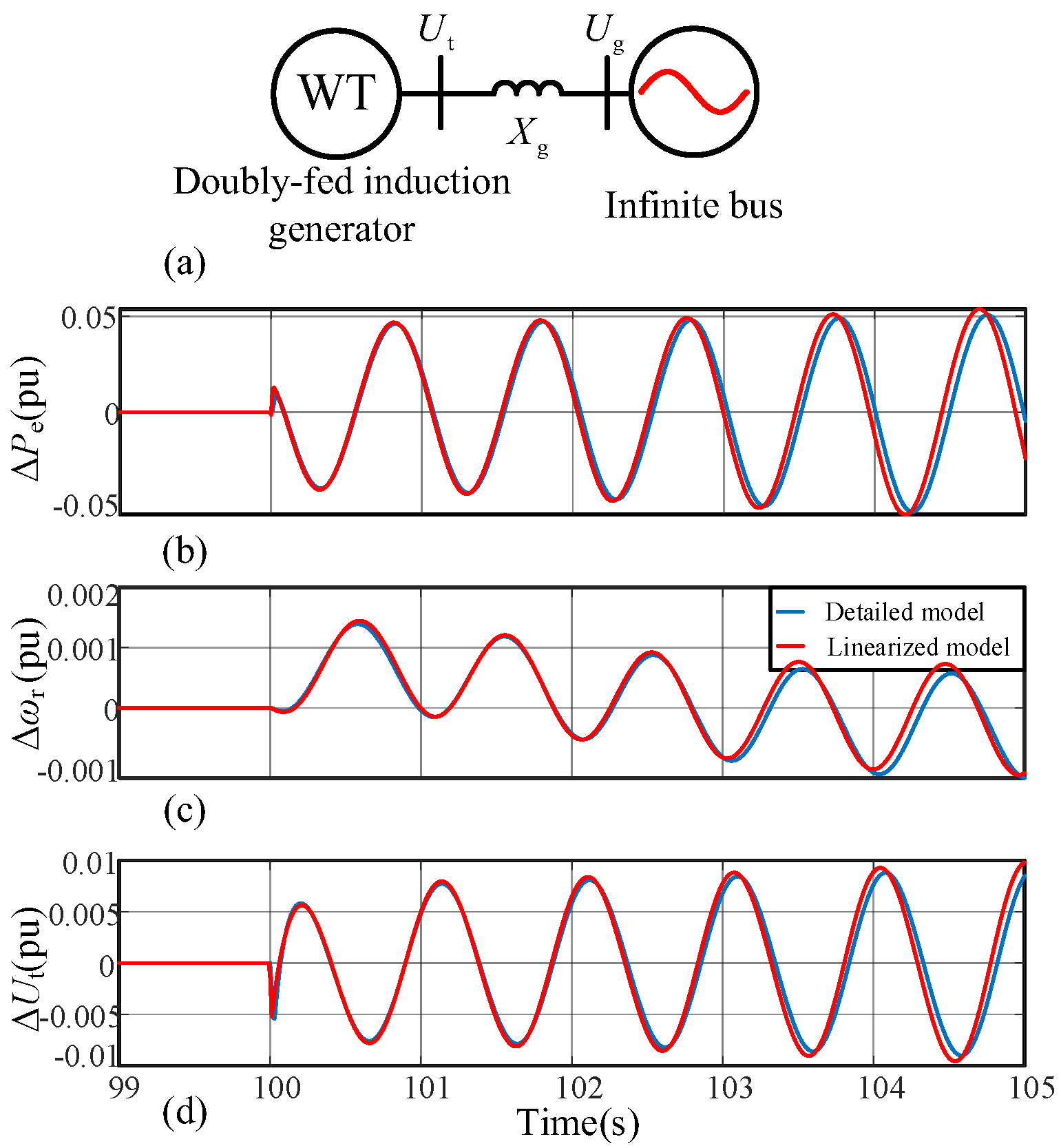
To verify the applicability of the proposed model for the DFIG, a single machine-infinite bus system is utilized, where a phase disturbance is added to the phase of the infinite bus. The response of the DFIG is shown in
Figure 4. The results imply that the motion equation model is suitable for the ULFO study.
4. Simulation Verification
In order to verify the analysis in the previous section, simulations were conducted using MATLAB/Simulink R2021a. The studied system is identical to that shown in
Figure 8.
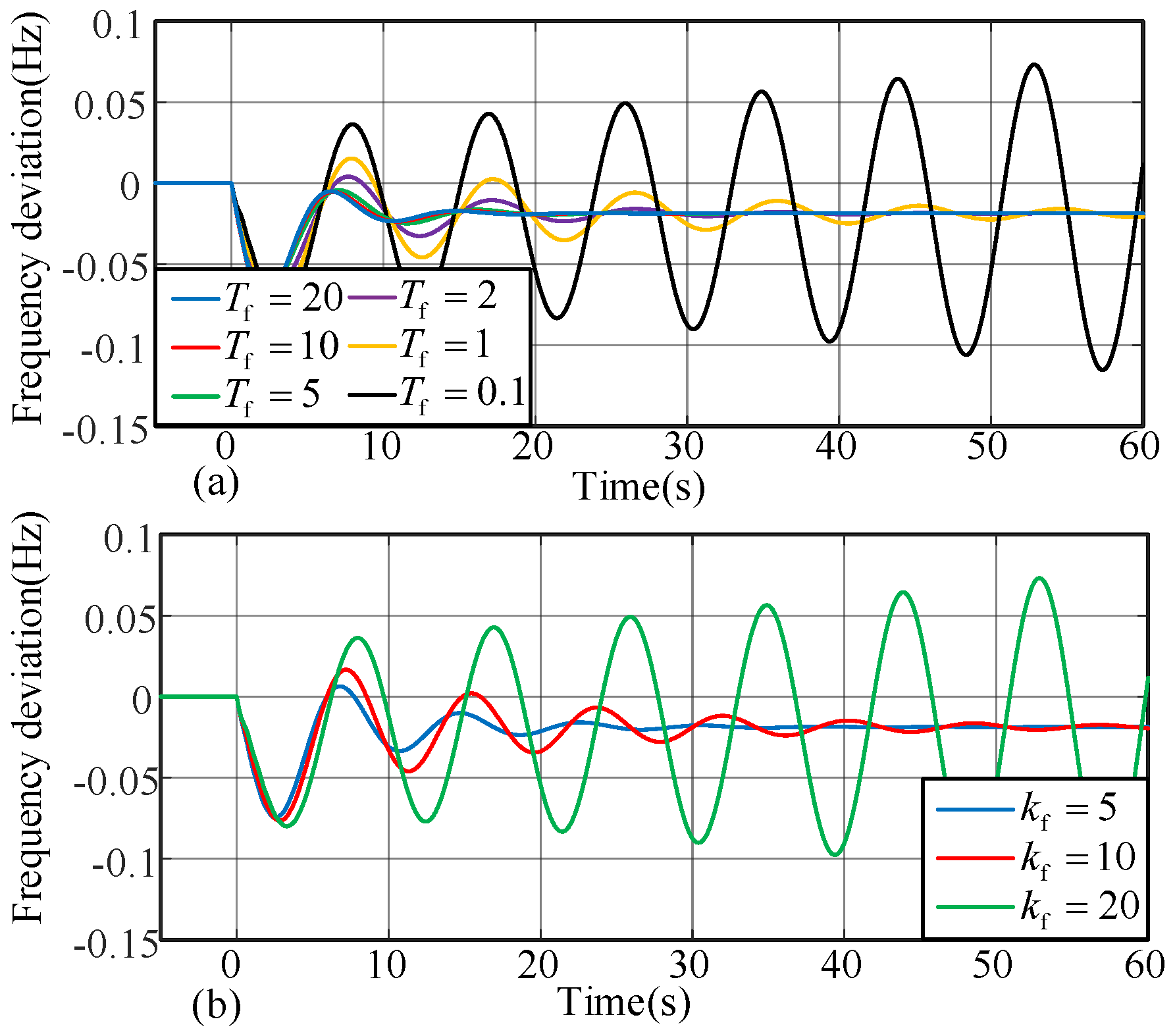
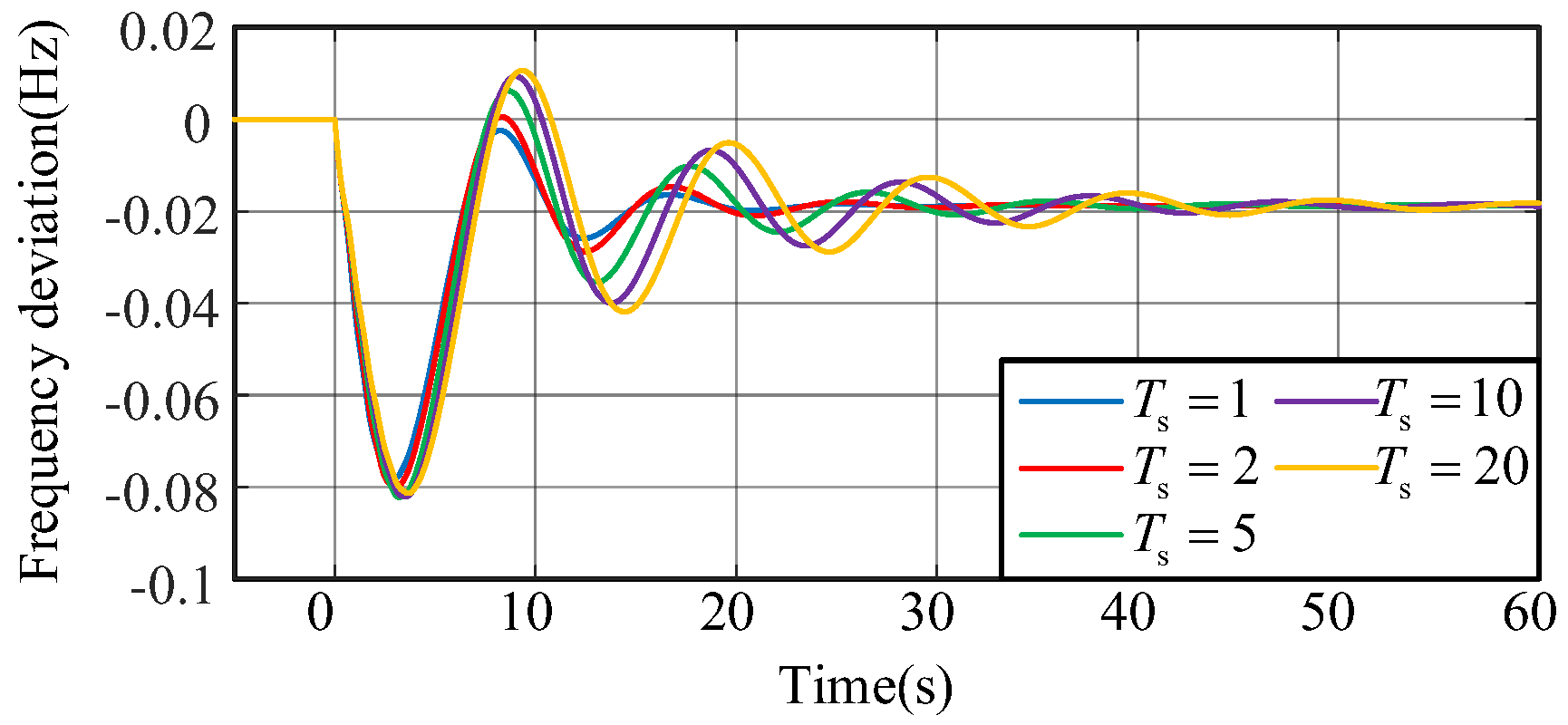
Figure 13 shows the simulation results when the time constant or the gain of the d
f/dt controller changes. It can be seen that the system is more stable with a larger time constant
Ts and a smaller virtual inertia
kf.
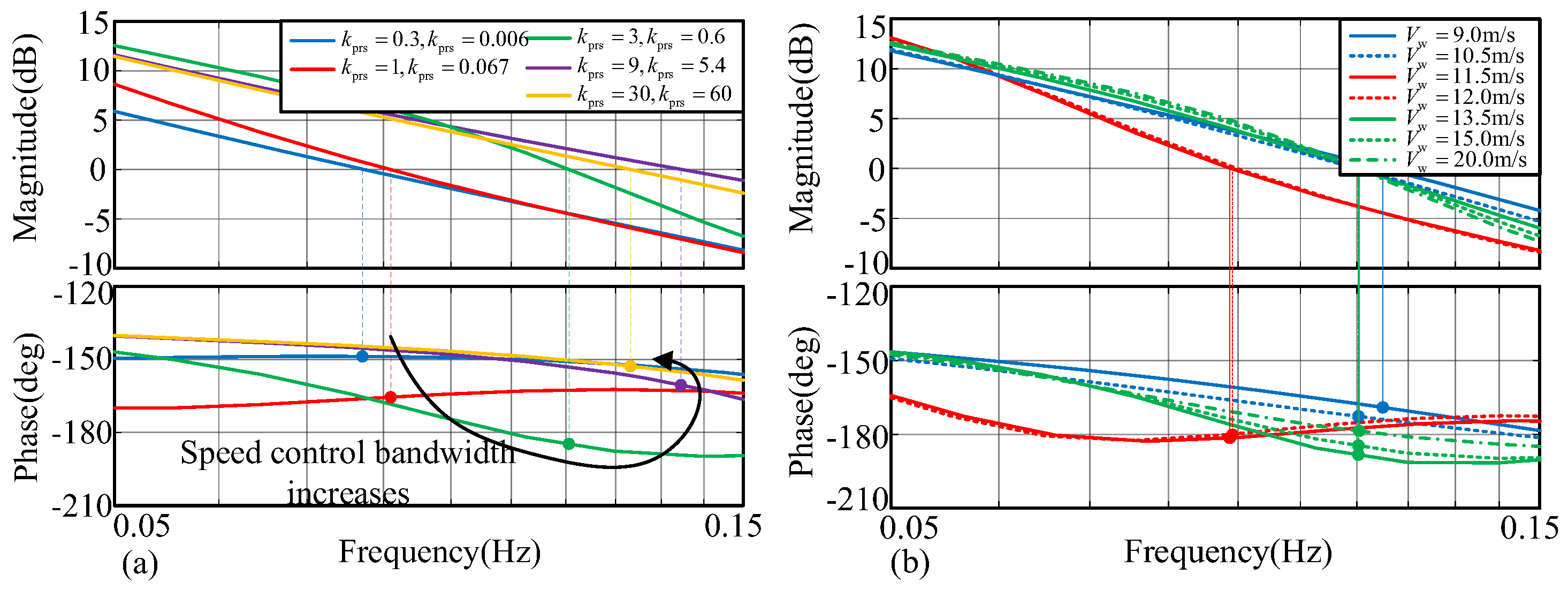
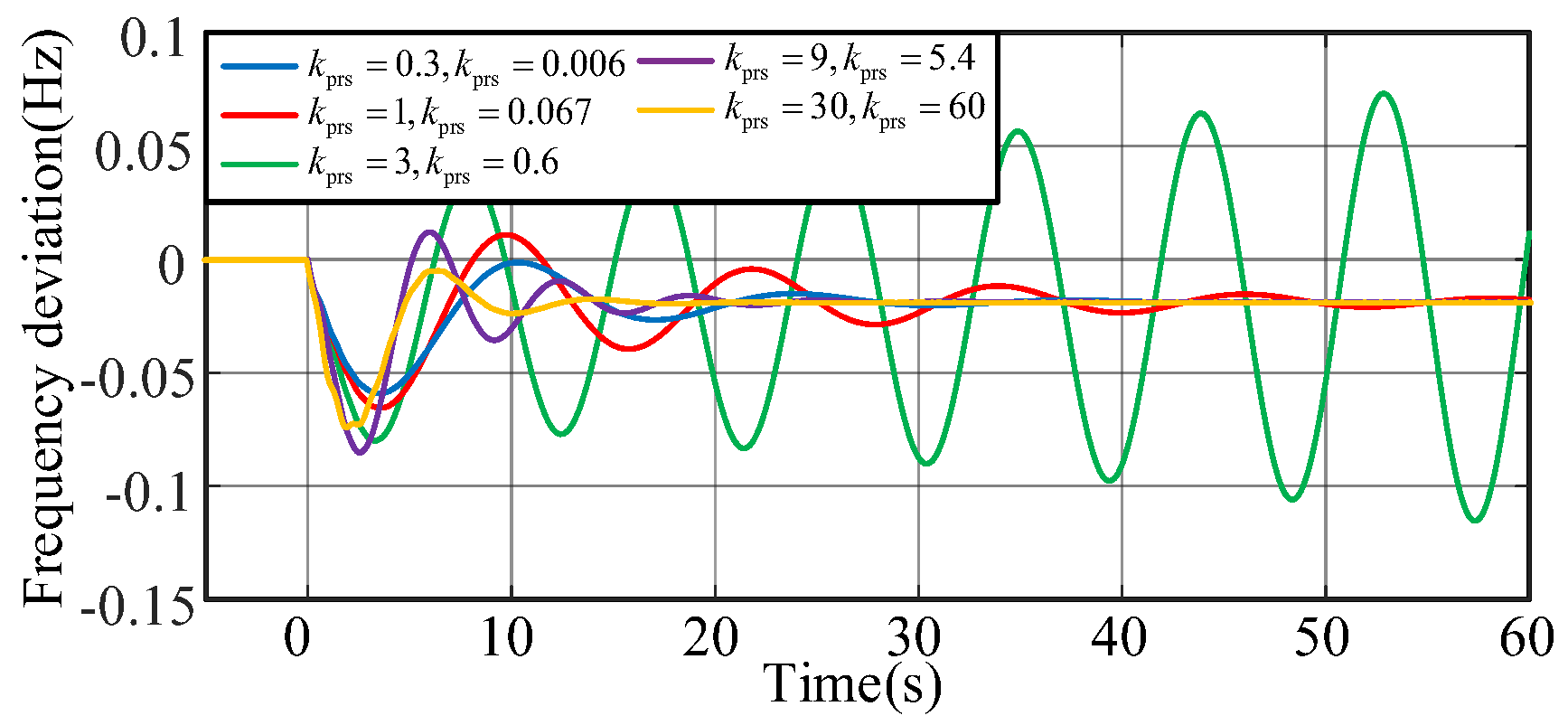
Figure 14 shows that the system becomes more unstable and then more stable when the bandwidth of the speed control increases.
Figure 15 shows the simulation results when the wind farm operates within different regions. When the wind speed increases, the power output of the wind farm is larger, and the system is more unstable, although the equivalent inertia of the DFIG varies.
Figure 16 illustrates that the system becomes more stable when the time constant of the low-pass filter of the MPPT increases.
When the pitch control parameter
kpp increases, the system becomes more stable, as shown in
Figure 17.
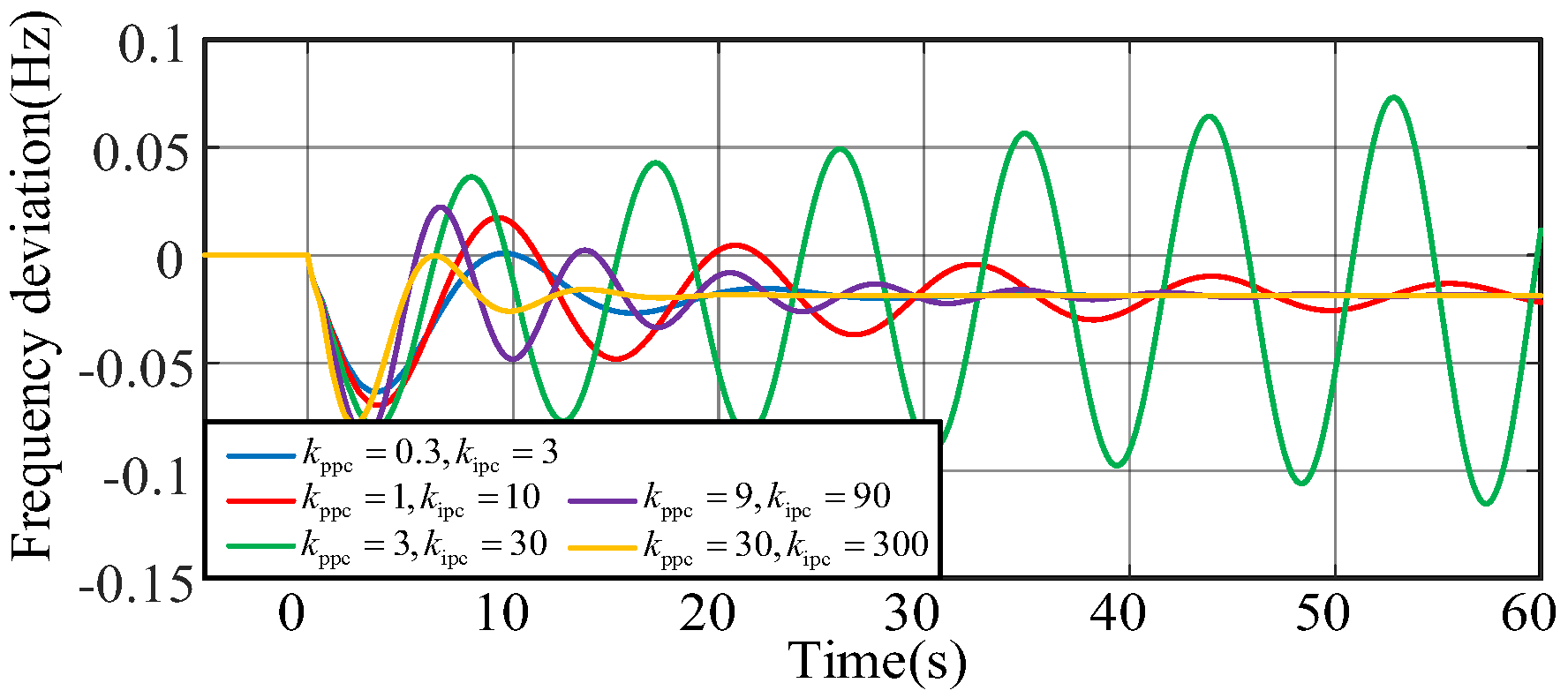
The influence of the bandwidth on pitch compensation control is shown in
Figure 18. When the bandwidth increases, the system first becomes more unstable and then more stable.
The simulations above coincide with the analysis in
Section 3, implying that the frequency domain analyses are correct.
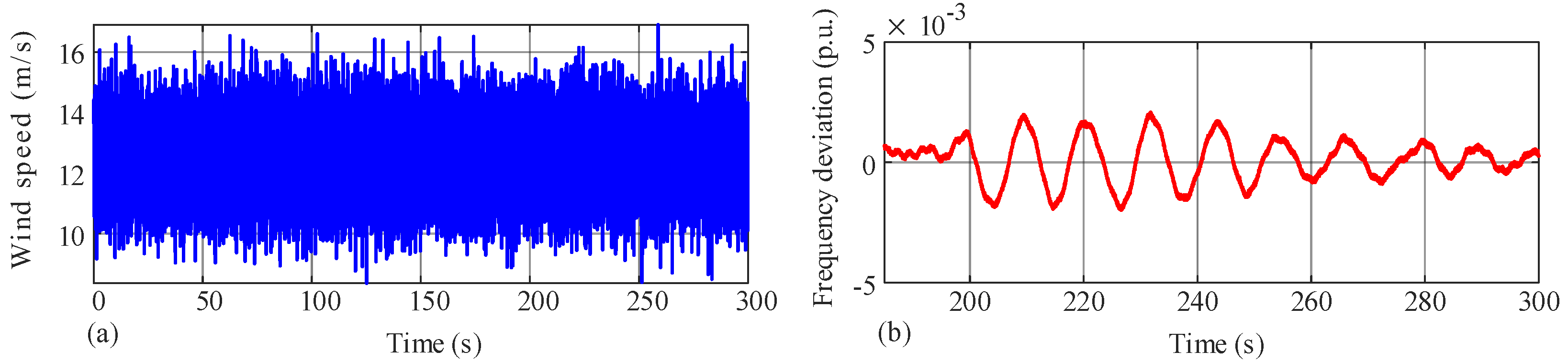
In reality, the wind speed is not constant. To simulate this effect on stability, the wind speed model is represented as follows:
where
vaverage = 12.5 m/s,
vp = 0.5 m/s,
ωwind = π rad/s, and
vrandom is represented by a Gaussian-distributed random signal whose variance equals 1. A small load disturbance is added at
t = 200 s, and the wind speed and system frequency response are shown in
Figure 19. With the wind speed changing, the oscillation does not converge or diverge fast enough; thus, in the long period, the waveform is similar to an unattenuated oscillation.
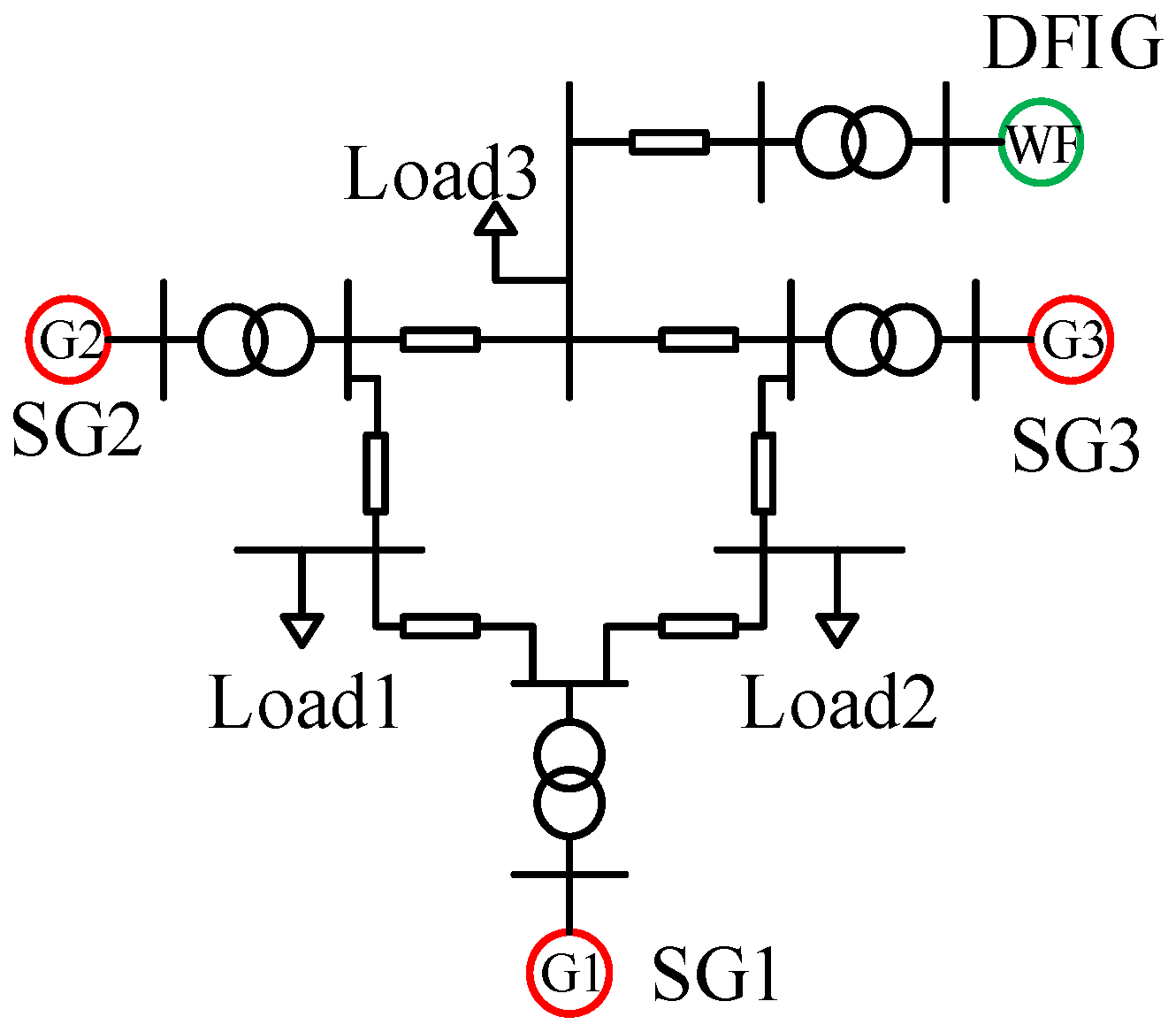
To explore whether the ultra-low frequency oscillation may exist in other systems, the four-machine, two-area system is utilized, where the steam turbines in the left area are replaced by two DFIGs. The system topology is shown in
Figure 20. At
t = 150 s, a load disturbance is added to Load 1, and the simulation result is shown in
Figure 21. It can be seen that although the simulation system has changed, this phenomenon still exists.
5. Conclusions
Various kinds of new oscillation instability issues occur when the capacity of REG increases. This paper focused on the ultra-low frequency oscillation risk in thermal power generation systems and discovered that DFIGs with df/dt virtual inertia controllers can induce this problem, which has not been reported or studied. By deriving the motion equation model of the DFIG, it was shown that the negative phase characteristic introduced by the equivalent inertia of the DFIG can reduce the phase margin of the entire system within the ultra-low frequency band, making the system lose stability more easily. Subsequently, key factors that influence the stability were analyzed through frequency domain characteristic analysis, depicting influencing trends. Especially, it should be noticed that the increase in the virtual inertia and the decrease in its time constant deteriorate the stability, creating a conflict between providing a fast inertial response and the stability requirement. Finally, time-domain simulations verified the consistency between electromagnetic transient model dynamics and frequency domain analyses.
Since the ULFO is introduced by the negative phase of the equivalent inertia of the DFIG, it is important to develop a method to mitigate this effect while preserving the ability of the fast inertial response. Future studies may include reshaping the equivalent inertia to satisfy both requirements or designing effective controllers for oscillation damping.


 and
and 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}