

Analysis of Ultrasound Signal on Reflection from a Sharp Corner Surface: Study of Selected Characteristics Deriving from Regression by Transfer Function


Abstract
:1. Introduction
2. Materials and Methods
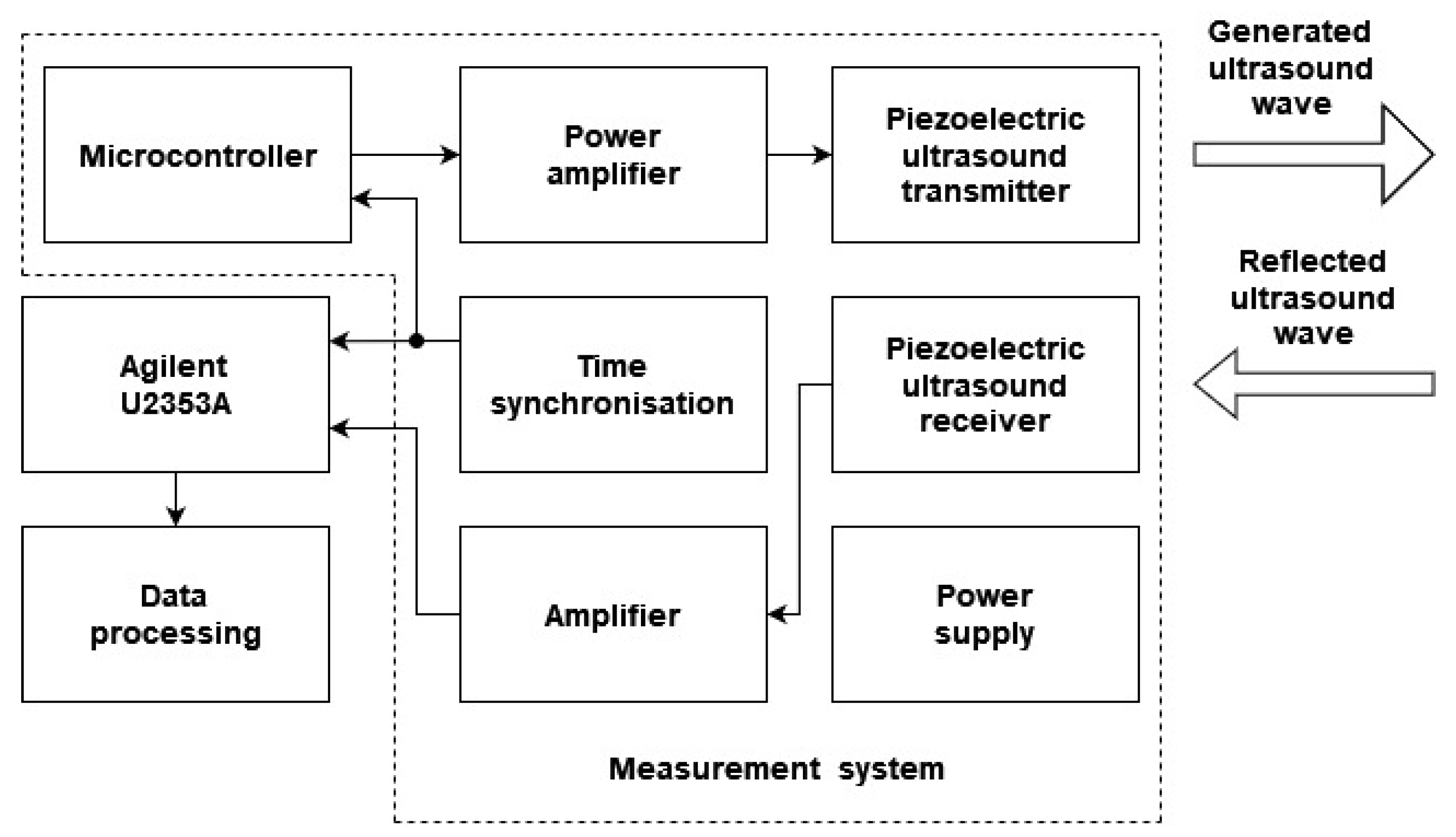
2.1. Measurement System
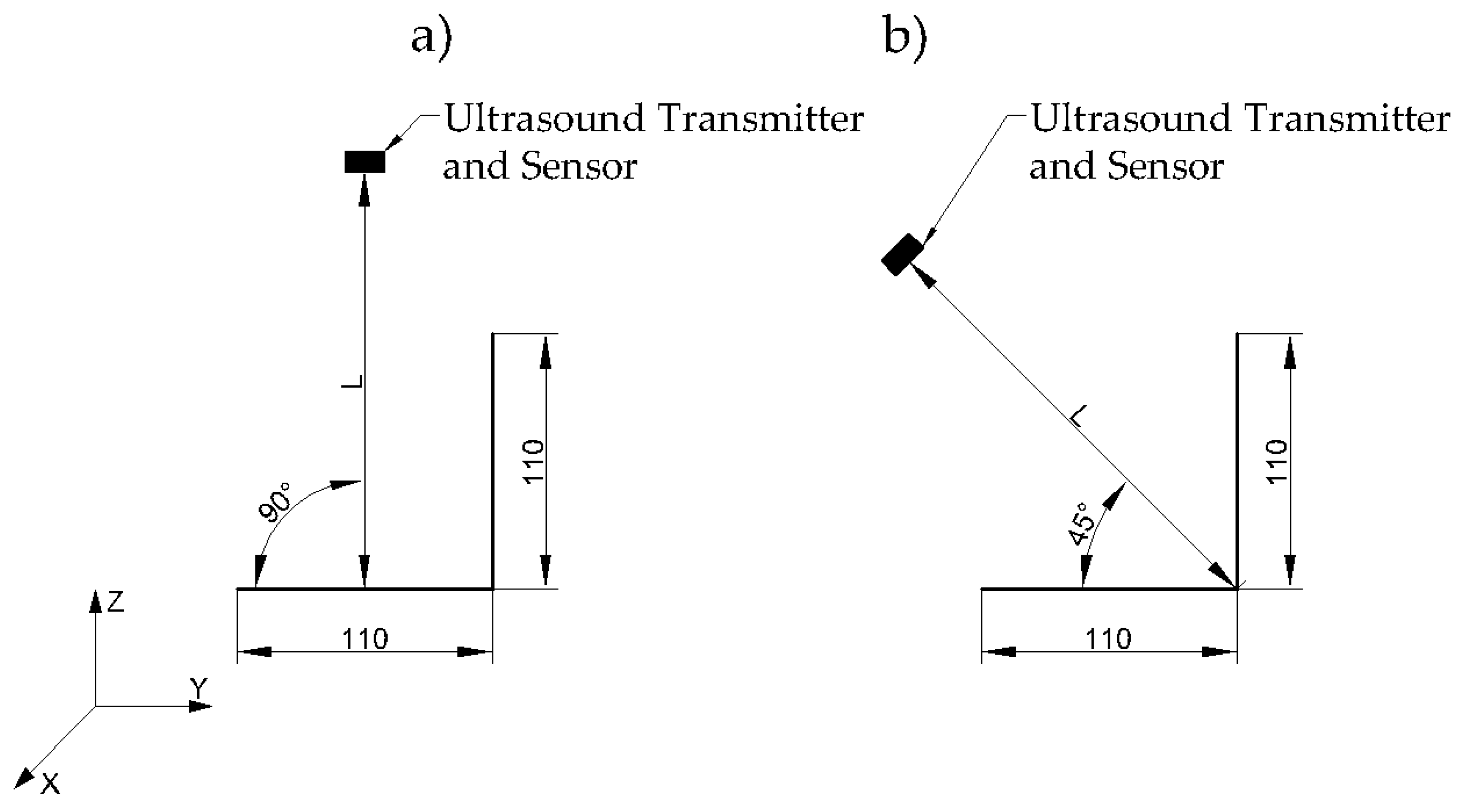
2.2. Conditions of Experiment
2.3. Data Processing and Used Software
3. Results and Discussion
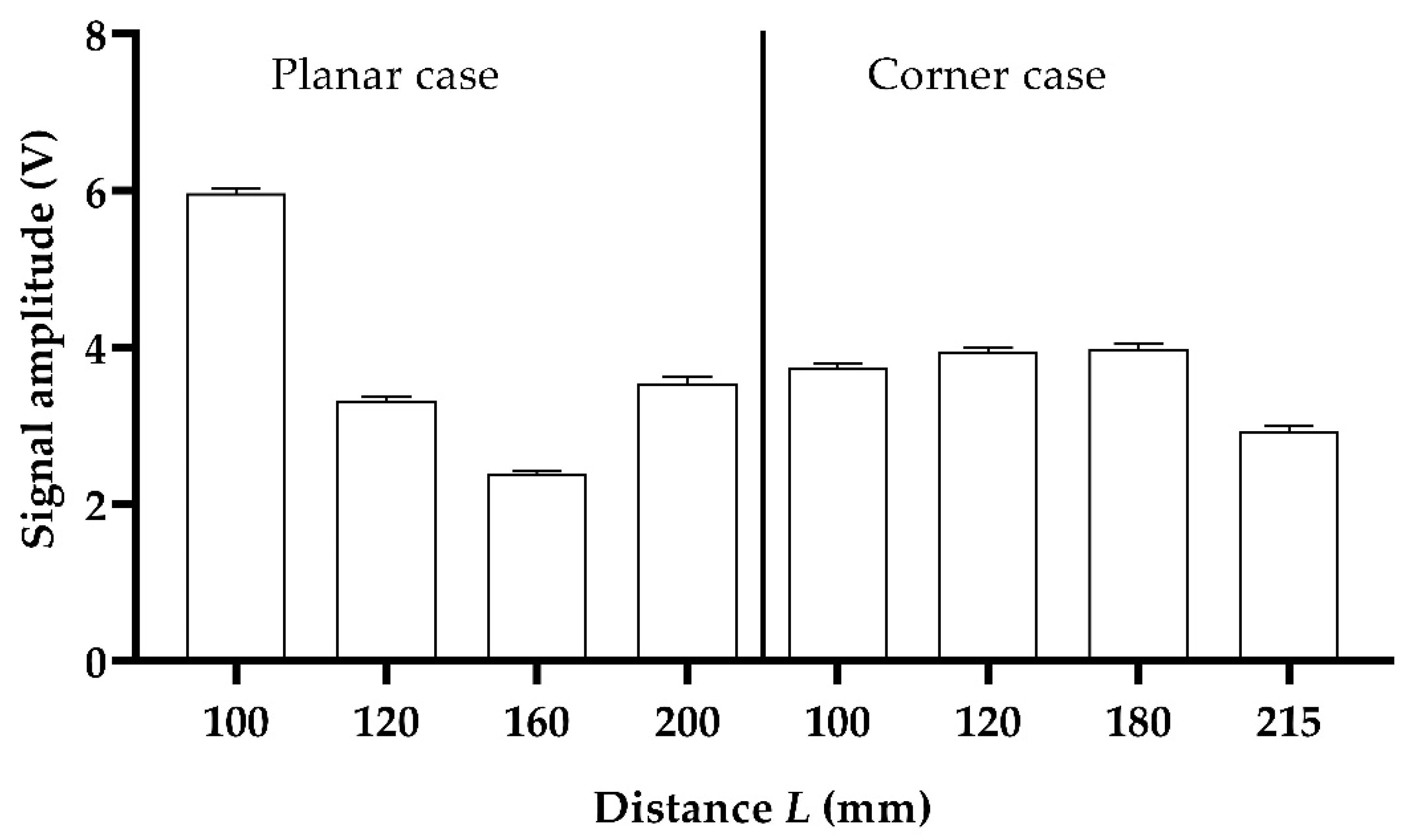
3.1. Analysis of Ultrasound Signal Amplitudes
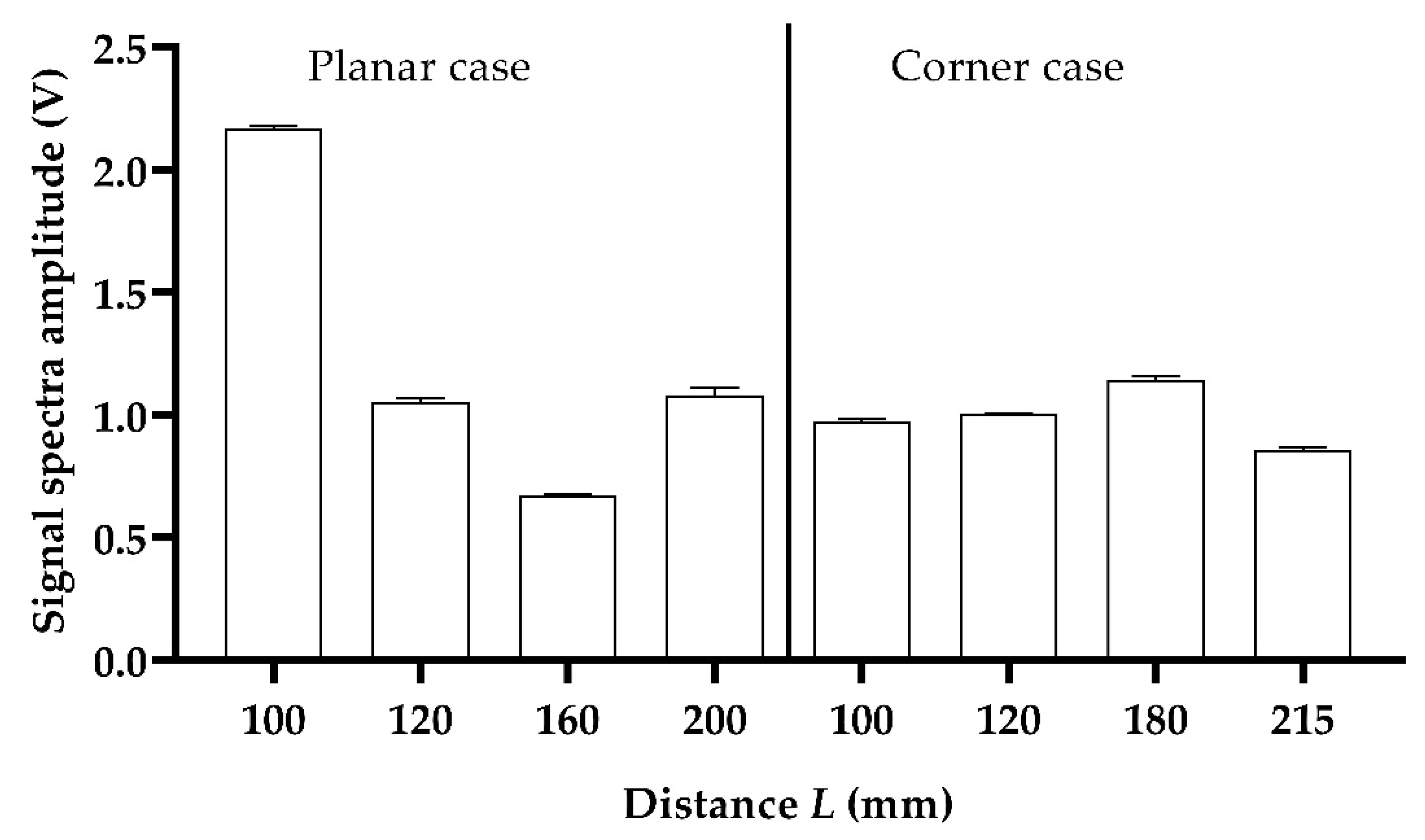
3.2. Analysis of Ultrasound Signal Frequency Spectra
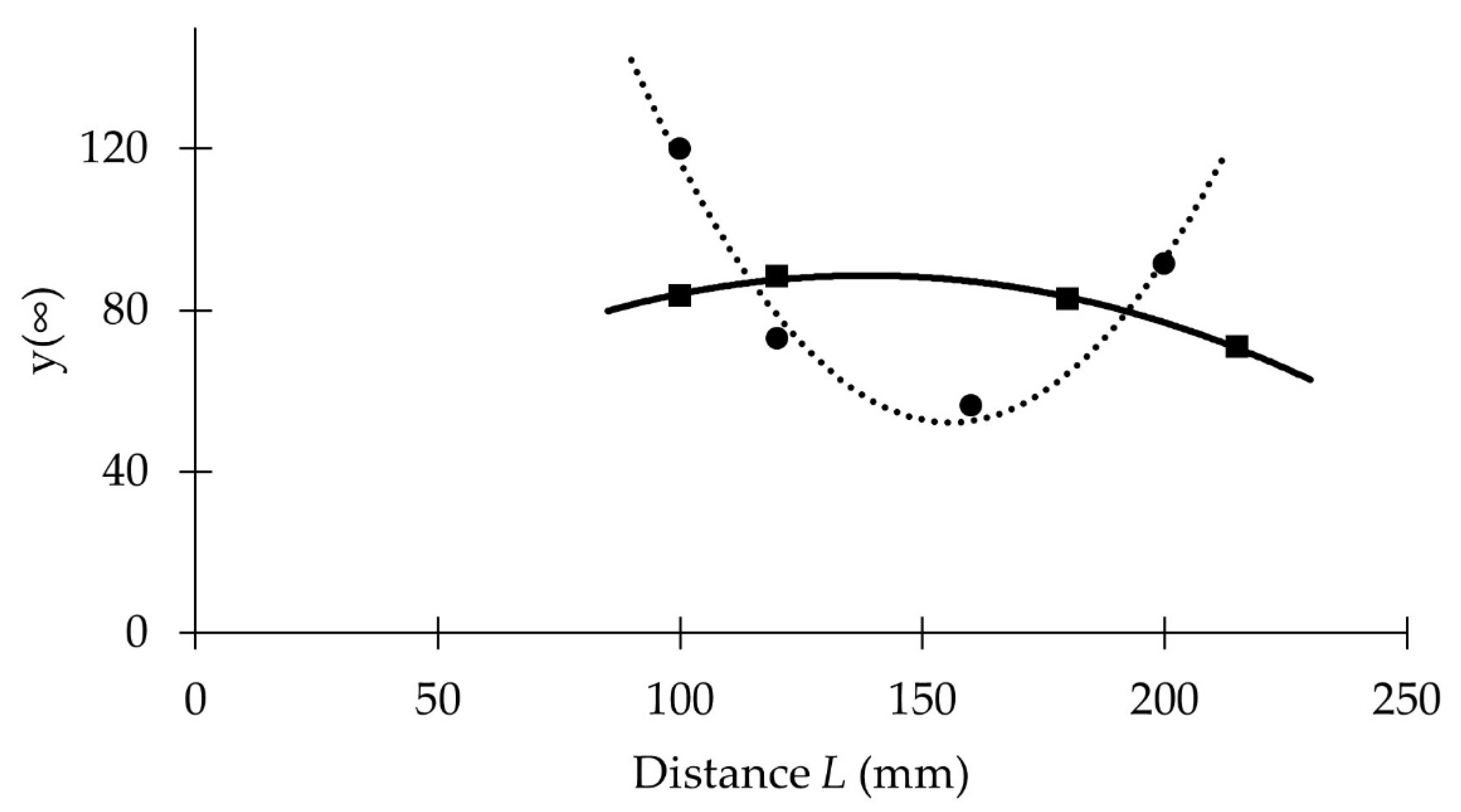
3.3. Analysis of Ultrasound Signal by Modelling on Complex Variable
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Naba, A.; Khoironi, M.F.; Santjojo, D.D.H. Low cost but accurate ultra-sonic distance measurement using combined method of threshold-correlation. In Proceedings of the International Conference on Quality in Research, Lombok, Indonesia, 10–13 November 2015; pp. 23–25. [Google Scholar]
- Qiu, Z.; Lu, Y.; Qiu, Z. Review of Ultrasonic Ranging Methods and Their Current Challenges. Micromachines 2022, 13, 520. [Google Scholar] [CrossRef] [PubMed]
- Hirata, S.; Kurosawa, M.K.; Katagiri, T. Cross-Correlation by Single-Bit Signal Processing for Ultrasonic Distance Measurement. IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 2008, 91, 1031–1037. [Google Scholar] [CrossRef]
- Vogt, M.; Gevers, M.; Musch, T. Evaluation of transducer configurations for ultrasound cross-correlation flow meters. In Proceedings of the IEEE International Instrumentation and Measurement Technology Conference Proceedings, Montevideo, Uruguay, 12–15 May 2014; pp. 40–44. [Google Scholar]
- Blasina, F.; Perez, N.; Budelli, E.; Lema, P.; Kiri Ing, R.; Negreira, C. Development of a multiple-scattering acoustic sensor for process monitoring: Application to monitoring milk coagulation. In Proceedings of the IEEE International Instrumentation and Measurement Technology Conference, Turin, Italy, 22–25 May 2017; pp. 1–5. [Google Scholar]
- Moreira, T.; Lima, J.; Costa, P.; Cunha, M. Low-Cost Sonar based on the Echolocation. In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics, Prague, Czech Republic, 29–31 July 2019; pp. 818–825. [Google Scholar]
- Martínez, M.; Benet, G.; Blanes, F.; Simó, J.; Pérez, P.; Poza, J. Wall/corner classification. In A new ultrasonic amplitude-based approach. Proceedings of the IFAC Proceedings Volumes, Lisbon, Portugal, 5–7 July 2004; pp. 663–668. [Google Scholar]
- Lendelová, J.; Cviklovič, V.; Olejár, M.; Pogran, Š. Animal Position Identification Logging System. SK Patent No. 288467, 2 June 2017. [Google Scholar]
- Pro-Wave. Air Ultrasonic Ceramic Transducers: 400ST/R160; © 2005 Pro-Wave Electronic Corp.: New Taipei City, Taiwan, 2005. [Google Scholar]
- Keysight. Keysight U2300A Series USB Multifunction Data Acquisition Devices; © 2021 Keysight Technologies: Santa Rosa, CA, USA, 2021. [Google Scholar]
- Arm Keil. C51; © 2019 Arm Limited.: Cambridge, UK, 2019.
- Isermann, R.; Münchhof, M. Identification of Dynamic Systems, 1st ed.; Springer: Berlin, Germany, 2011; p. 705. [Google Scholar]
- Moreira, T.; Lima, J.; Costa, P.; Cunha, M. Low-Cost Binaural System Based on the Echolocation. In Proceedings of the Advances in Intelligent Systems and Computing, Porto, Portugal, 20–22 November 2019; pp. 60–71. [Google Scholar]
- Chen, B.C.; Chou, J. A corner differentiation algorithm by a single sonar sensor for mobile robots. Asian J. Control. 2008, 10, 430–438. [Google Scholar] [CrossRef]
- Yata, T.; Ohya, A.; Yuta, S. Use of amplitude of echo for environment recognition by mobile robots. In Proceedings of the 2000 IEEE/RSJ International Conference on Intelligent Robots and Systems, Takamatsu, Japan, 31 October 2000–5 November 2000; pp. 1298–1303. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Distance L (mm) Planar Case | Gain (dB) | Difference (%) | Distance L (mm) Corner Case | Gain (dB) | Difference (%) |
|---|---|---|---|---|---|
| 100 | 4.531 | 68.481 | 100 | 2.152 | 28.117 |
| 120 | −0.560 | −6.240 | 120 | 2.618 | 35.171 |
| 160 | −3.447 | −32.756 | 180 | 2.706 | 36.551 |
| 200 | * | * | 215 | * | * |
| Distance L (mm) Planar Case | Gain (dB) | Difference (%) | Distance L (mm) Corner Case | Gain (dB) | Difference (%) |
|---|---|---|---|---|---|
| 100 | 6.0543 | 100.778 | 100 | 1.0817 | 13.262 |
| 120 | −0.215 | −2.446 | 120 | 1.361 | 16.965 |
| 160 | −4.116 | −37.743 | 180 | 2.472 | 32.927 |
| 200 | * | * | 215 | * | * |
| Parameter | Value | |
|---|---|---|
| Poles (-) | Planar case | −1564 −2249 ± i 3721 |
| Corner case | −1196 −1395 ± i 3885 | |
| Zeros (-) | Planar case | 8943 ± i 8997 |
| Corner case | 6383 ± i 6368 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Madola, V.; Cviklovič, V.; Paulovič, S. Analysis of Ultrasound Signal on Reflection from a Sharp Corner Surface: Study of Selected Characteristics Deriving from Regression by Transfer Function. Processes 2022, 10, 2644. https://doi.org/10.3390/pr10122644
Madola V, Cviklovič V, Paulovič S. Analysis of Ultrasound Signal on Reflection from a Sharp Corner Surface: Study of Selected Characteristics Deriving from Regression by Transfer Function. Processes. 2022; 10(12):2644. https://doi.org/10.3390/pr10122644
Chicago/Turabian StyleMadola, Vladimír, Vladimír Cviklovič, and Stanislav Paulovič. 2022. "Analysis of Ultrasound Signal on Reflection from a Sharp Corner Surface: Study of Selected Characteristics Deriving from Regression by Transfer Function" Processes 10, no. 12: 2644. https://doi.org/10.3390/pr10122644
APA StyleMadola, V., Cviklovič, V., & Paulovič, S. (2022). Analysis of Ultrasound Signal on Reflection from a Sharp Corner Surface: Study of Selected Characteristics Deriving from Regression by Transfer Function. Processes, 10(12), 2644. https://doi.org/10.3390/pr10122644