
Current Progress of Magnetoresistance Sensors


Abstract
1. Introduction
1.1. Magnetoresistance
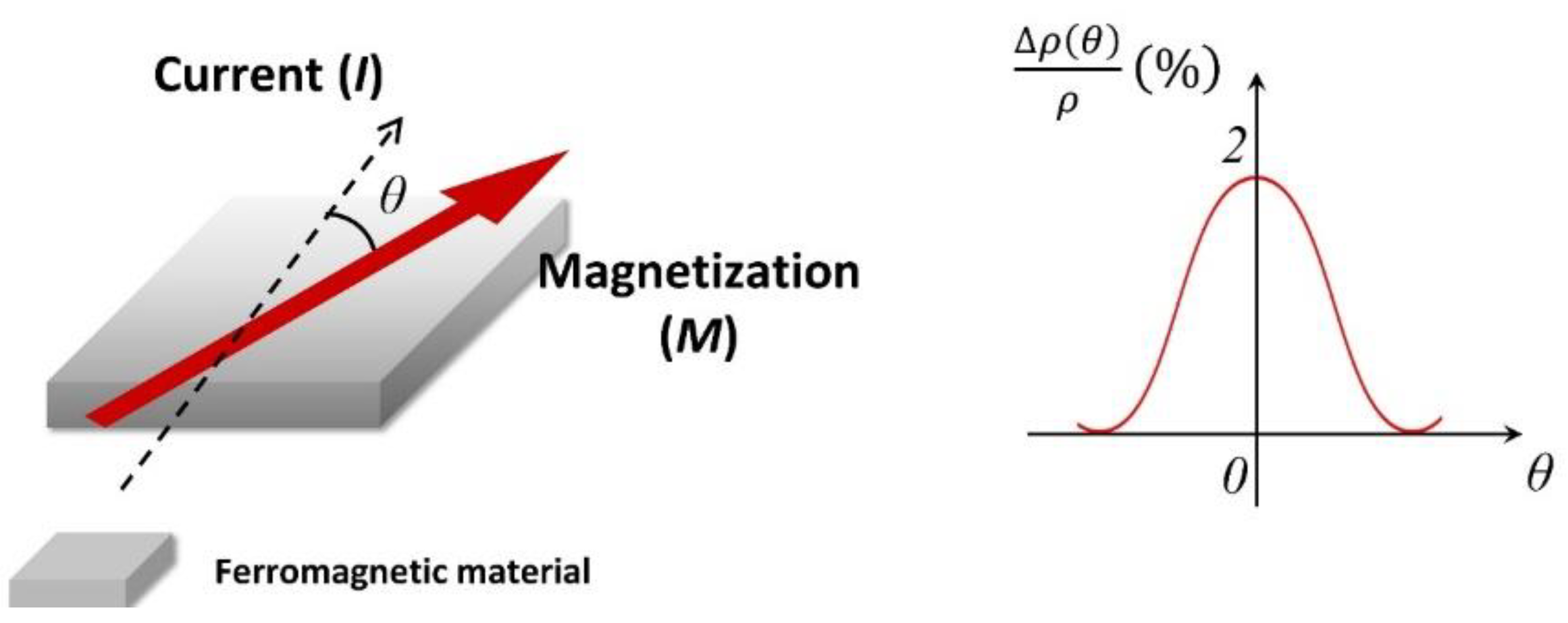
1.1.1. Anisotropic Magnetoresistance (AMR)
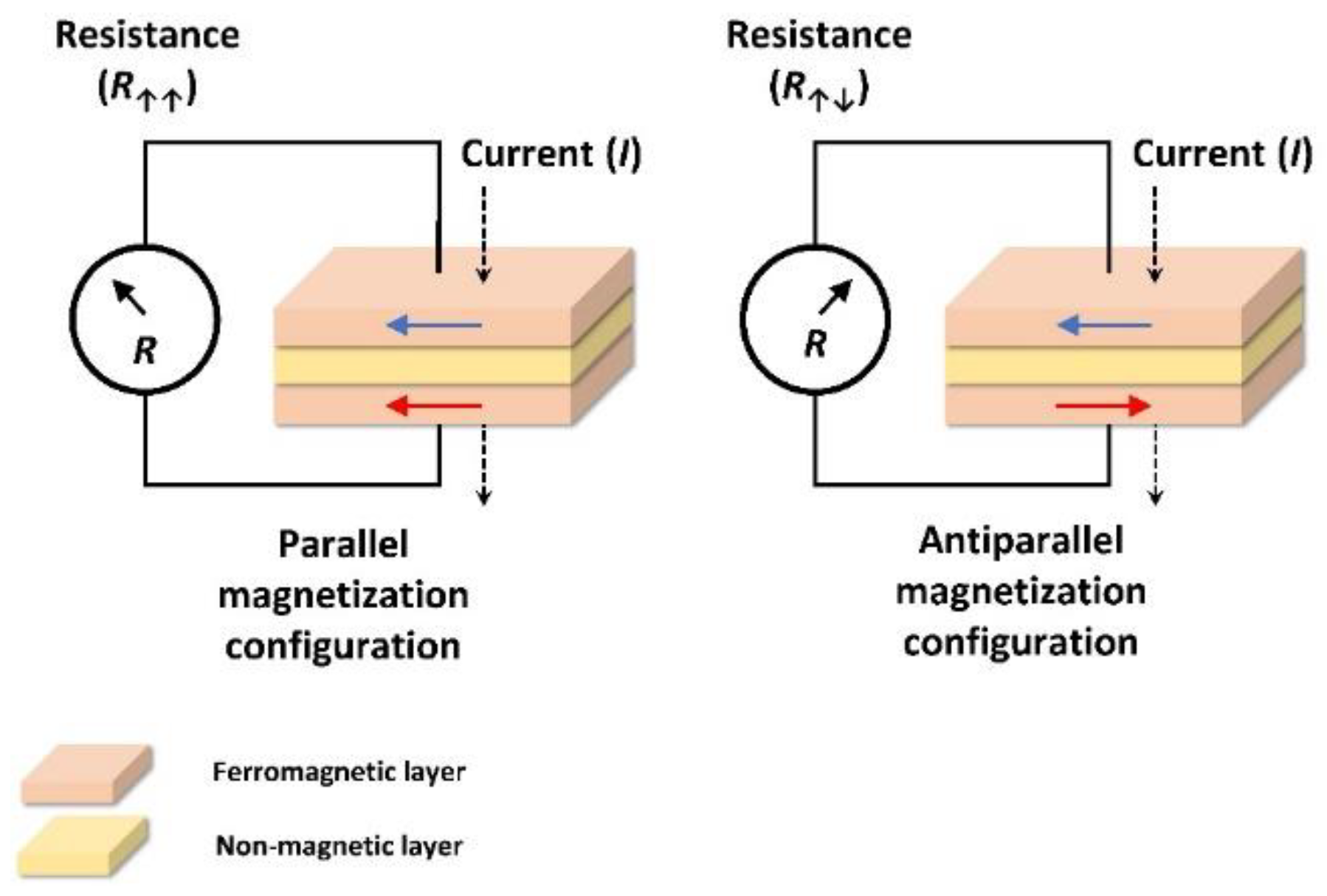
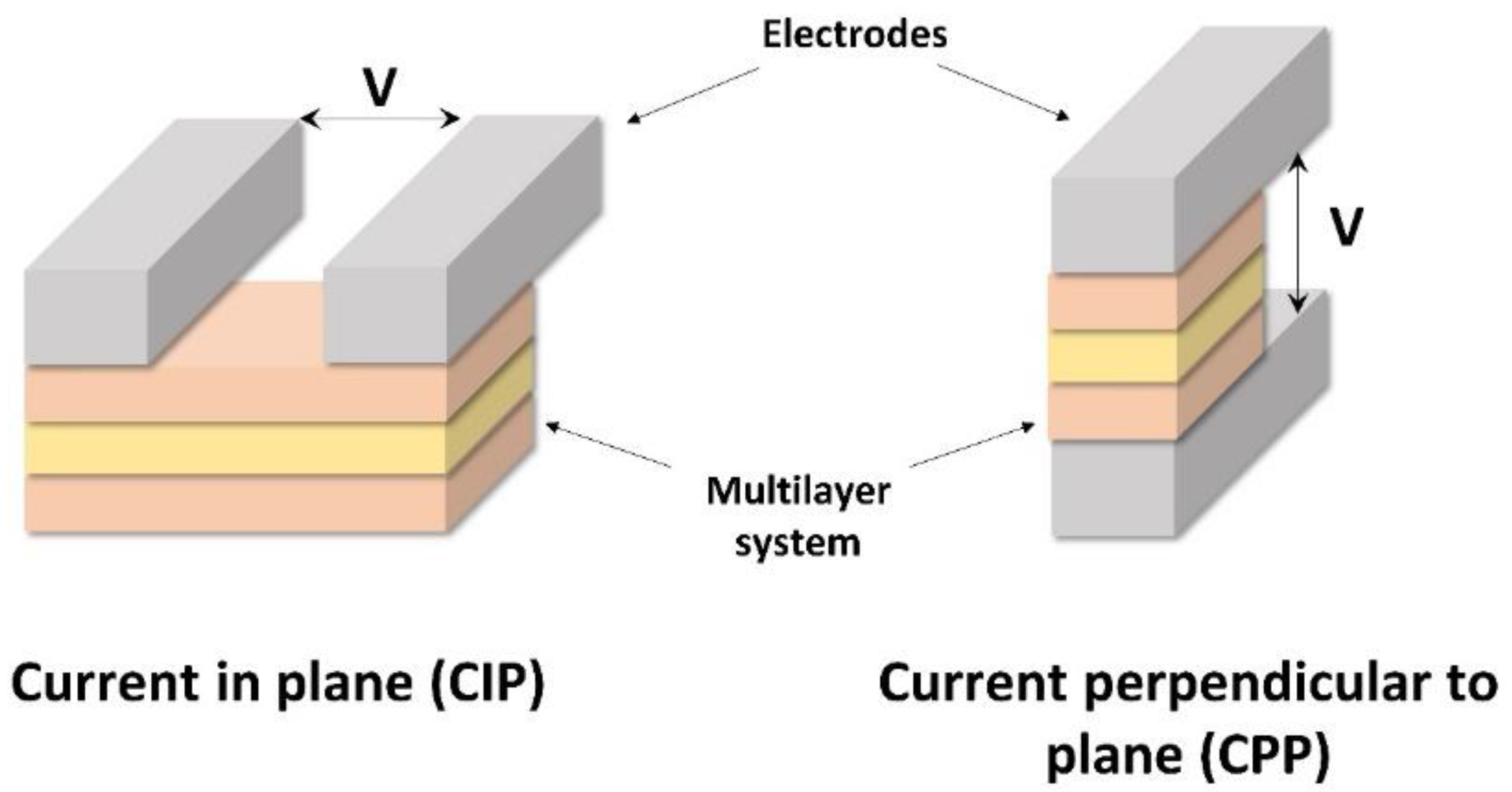
1.1.2. Giant Magnetoresistance (GMR)
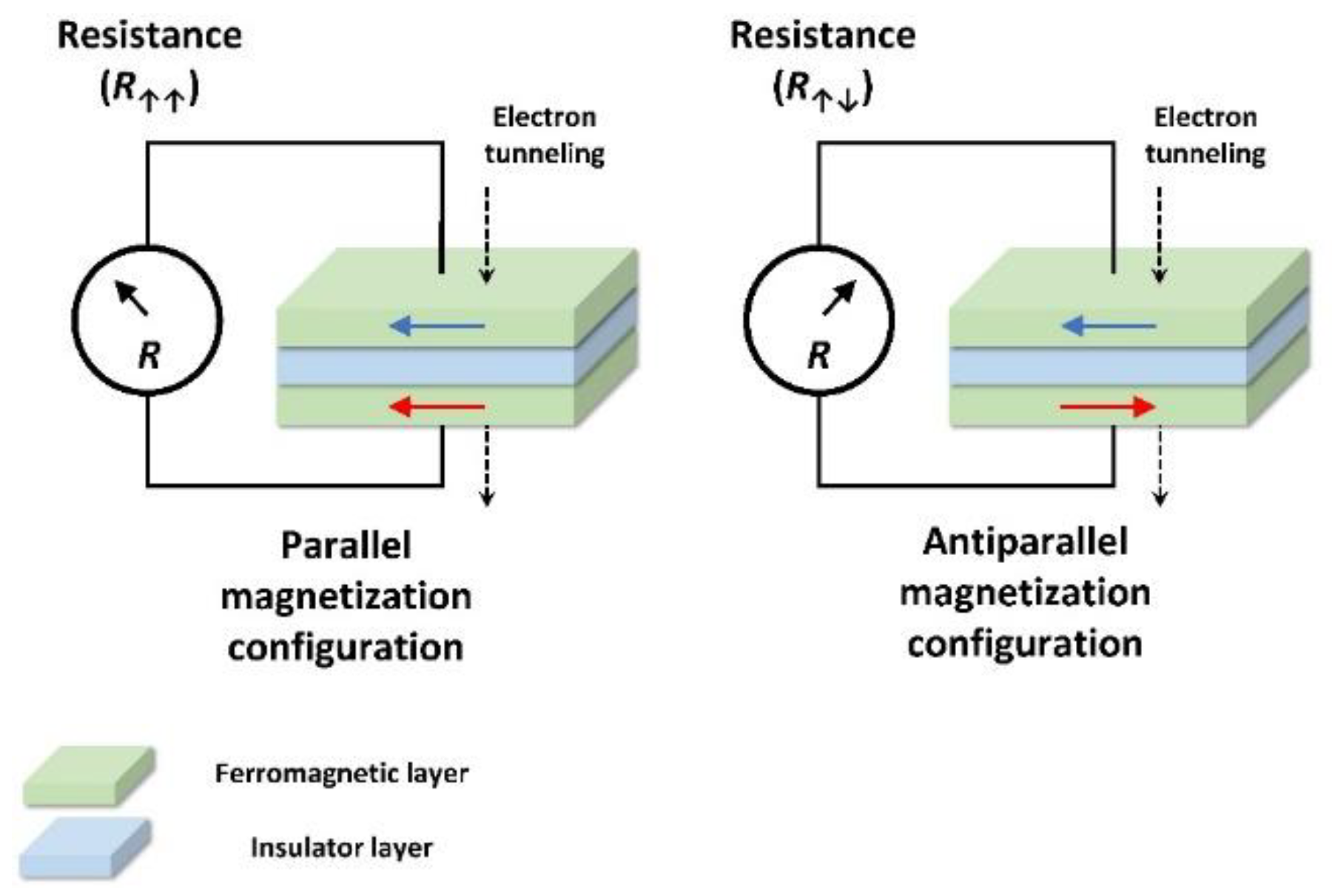
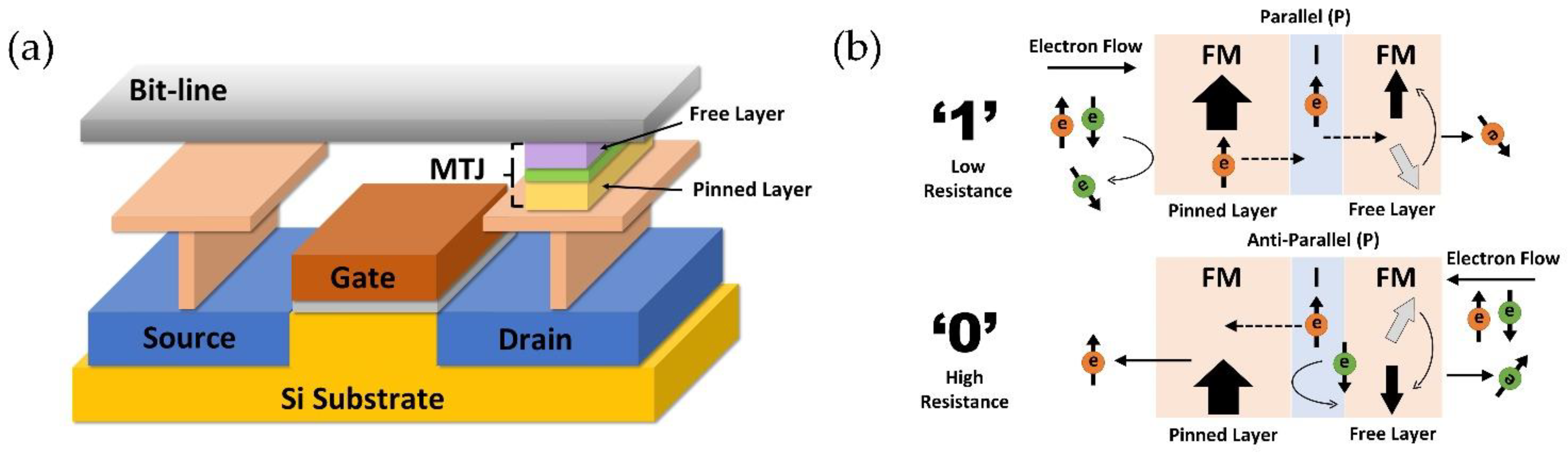
1.1.3. Tunneling Magnetoresistance (TMR)
2. Developing Magnetoresistance Materials/Structures
2.1. GMR and TMR Multilayer Systems
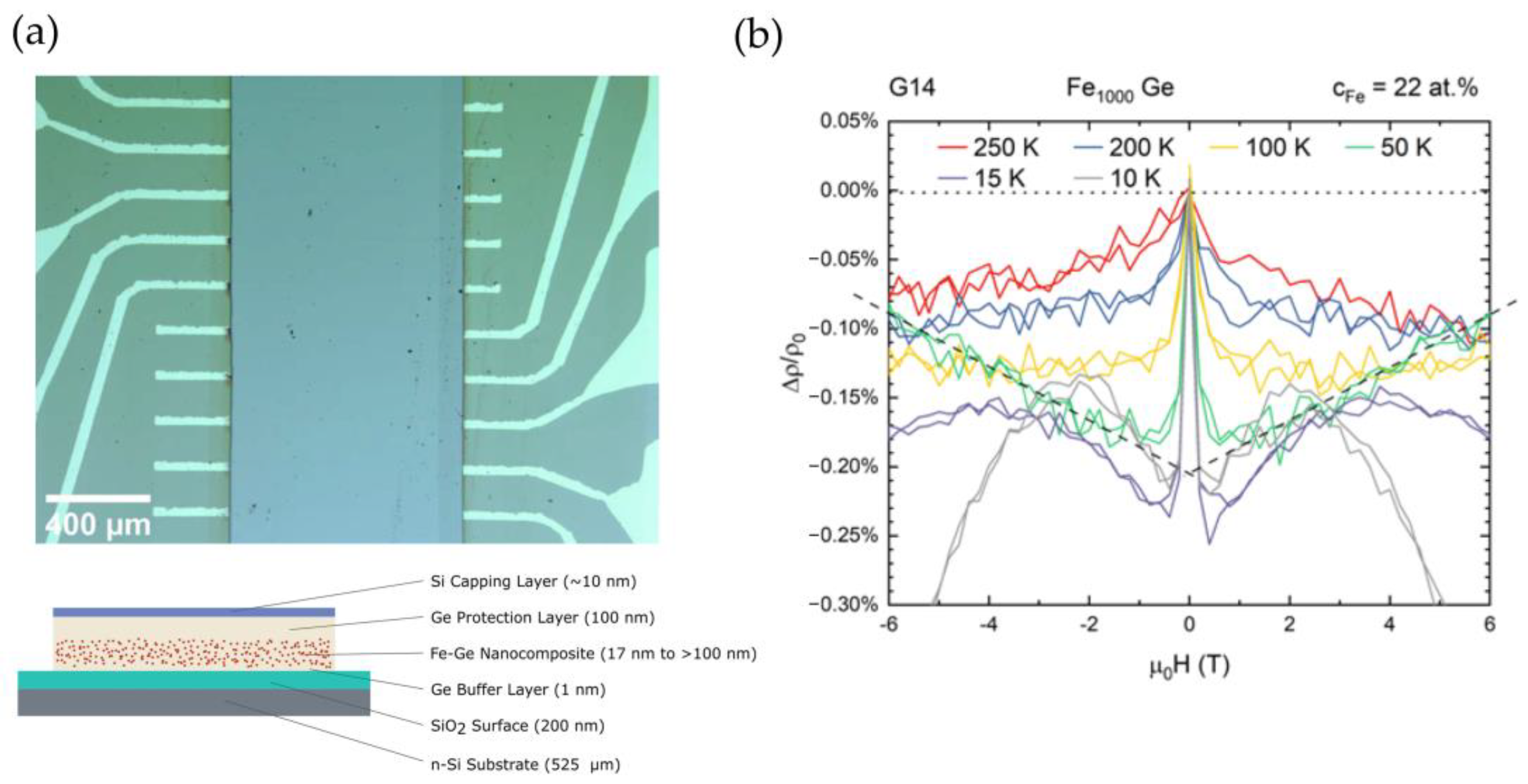
2.2. Granular MR Systems
2.3. Graphene-Based MR Systems
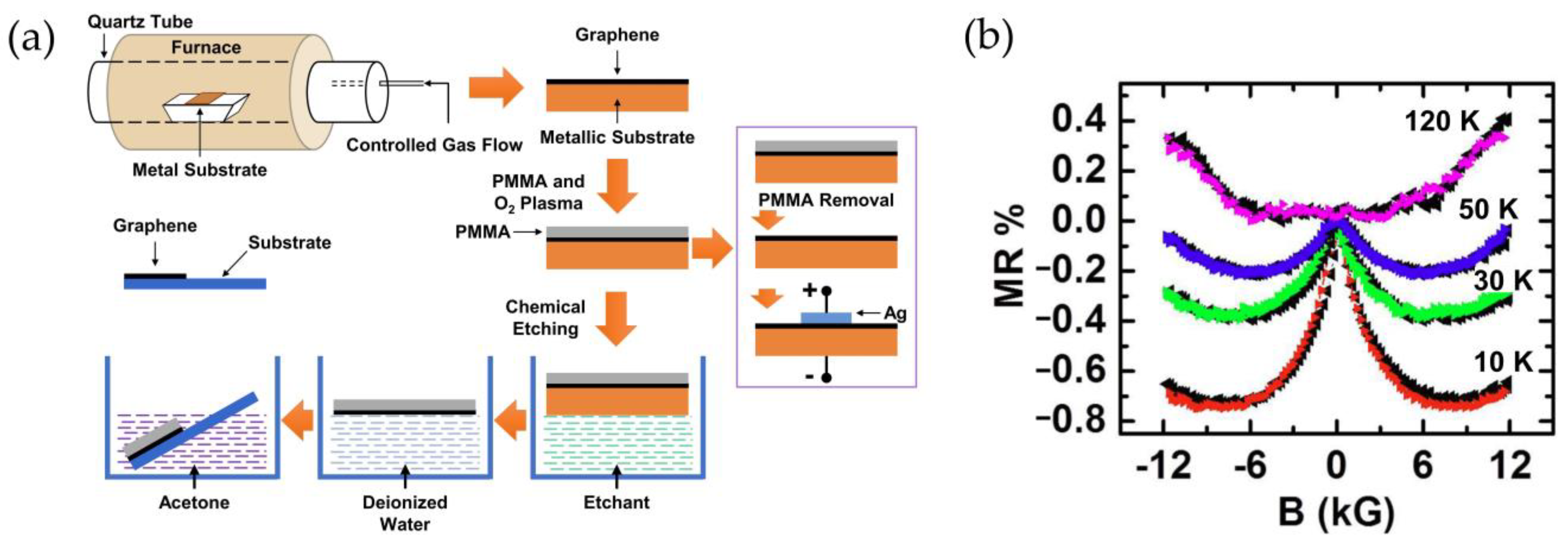
2.3.1. Layered Graphene MR Systems
2.3.2. Graphene Foam MR Systems
2.3.3. Hybrid Graphene Nanocomposites MR Systems
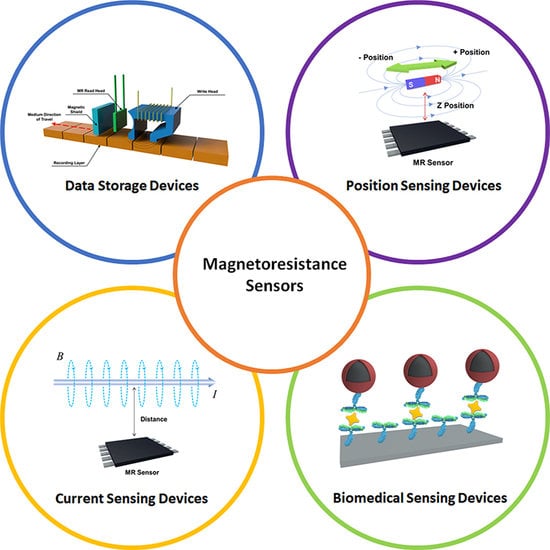
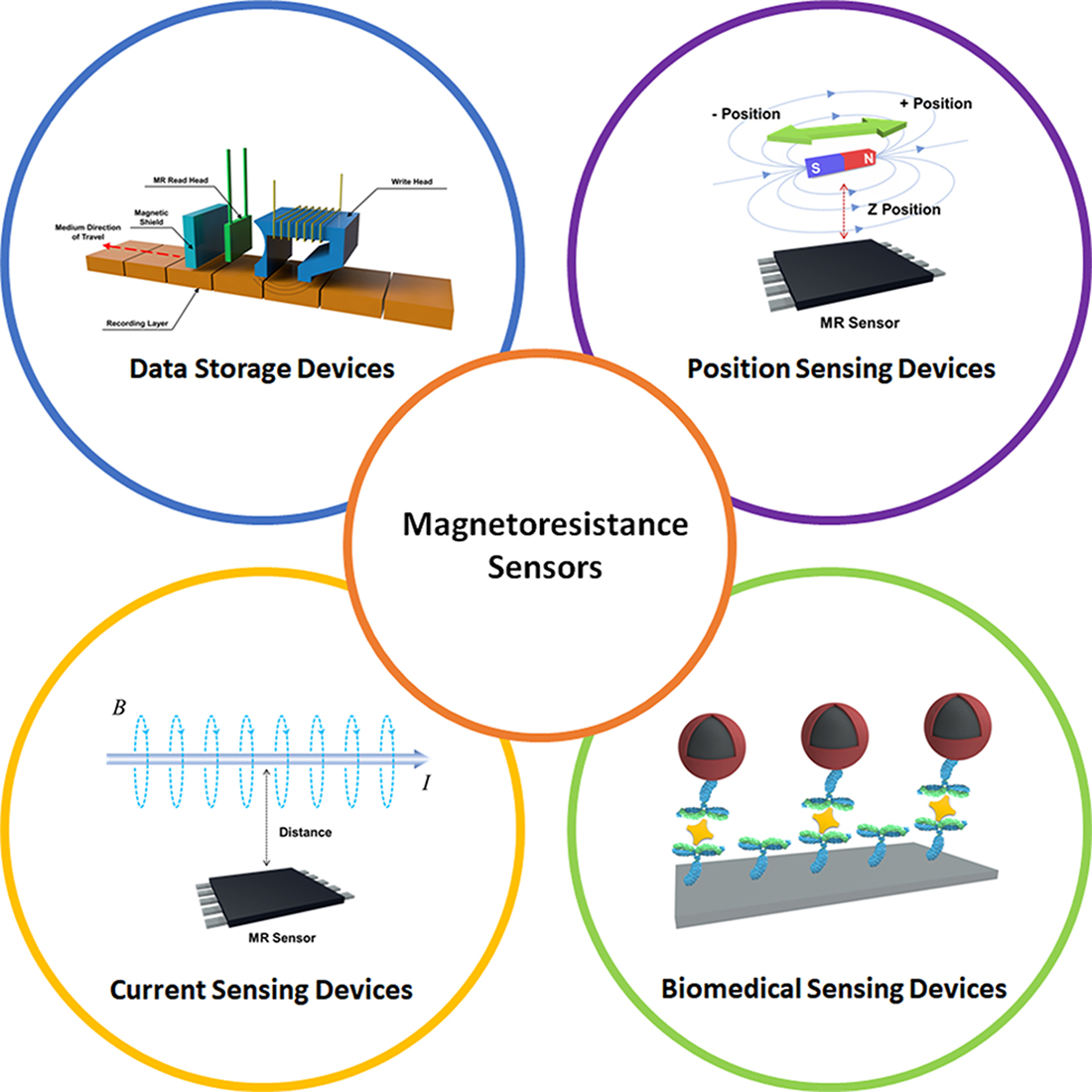
3. Applications of Magnetoresistance Sensors
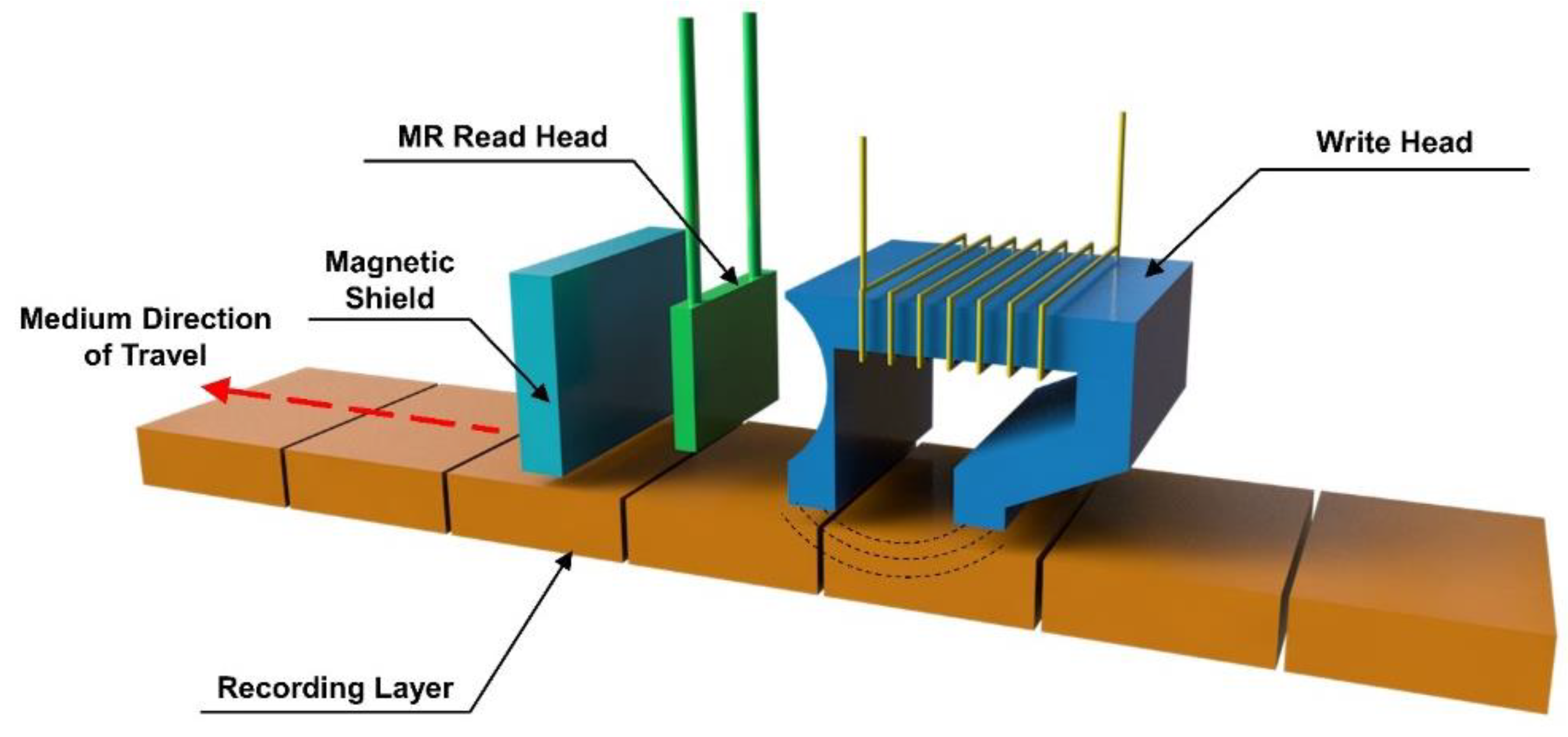
3.1. MR Sensors in Magnetic Storage
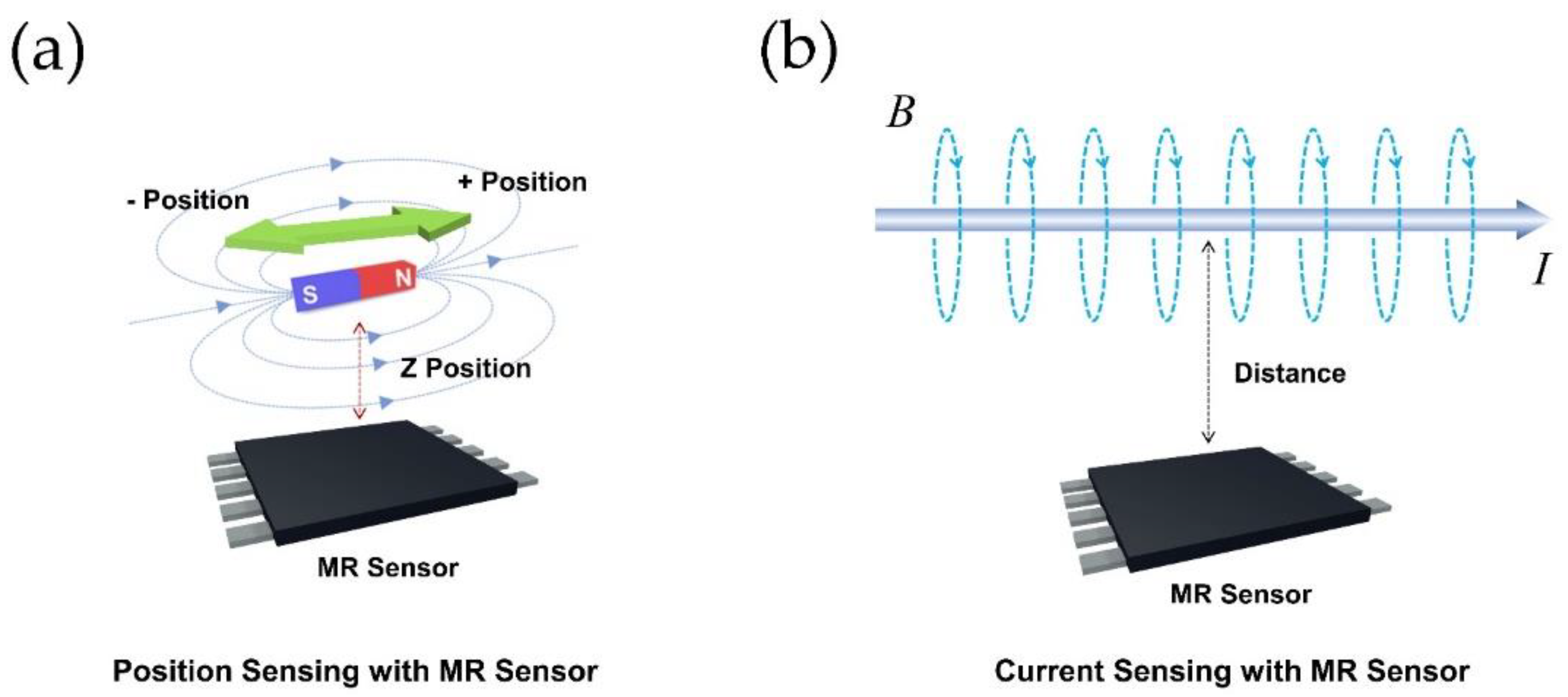
3.2. MR Sensors in Position Sensing, Current Sensing, and Non-Destructive Monitoring
3.3. MR Sensors in Biomedical Sensing Systems
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Thomson, W., XIX. On the electro-dynamic qualities of metals:—Effects of magnetization on the electric conductivity of nickel and of iron. Proc. R. Soc. London 1857, 8, 546–550. [Google Scholar]
- Baibich, M.N.; Broto, J.M.; Fert, A.; Van Dau, F.N.; Petroff, F.; Etienne, P.; Creuzet, G.; Friederich, A.; Chazelas, J. Giant Magnetoresistance of (001)Fe/(001)Cr Magnetic Superlattices. Phys. Rev. Lett. 1988, 61, 2472–2475. [Google Scholar] [CrossRef] [PubMed]
- Binasch, G.; Grünberg, P.; Saurenbach, F.; Zinn, W. Enhanced magnetoresistance in layered magnetic structures with antiferromagnetic interlayer exchange. Phys. Rev. B 1989, 39, 4828–4830. [Google Scholar] [CrossRef] [PubMed]
- Chappert, C.; Fert, A.; Van Dau, F.N. The emergence of spin electronics in data storage. Nat. Mater. 2007, 6, 813. [Google Scholar] [CrossRef] [PubMed]
- Kartik, V.; Sebastian, A.; Tuma, T.; Pantazi, A.; Pozidis, H.; Sahoo, D.R. High-bandwidth nanopositioner with magnetoresistance based position sensing. Mechatronics 2012, 22, 295–301. [Google Scholar] [CrossRef]
- Hamia, R.; Cordier, C.; Dolabdjian, C. Eddy-current non-destructive testing system for the determination of crack orientation. NDT E Int. 2014, 61, 24–28. [Google Scholar] [CrossRef]
- Krishna, V.D.; Wu, K.; Perez, A.M.; Wang, J.-P. Giant Magnetoresistance-based Biosensor for Detection of Influenza A Virus. Front. Microbiol. 2016, 7, 400. [Google Scholar] [CrossRef]
- Demirci, E. Magnetic and Magnetotransport Properties of Memory Sensors Based on Anisotropic Magnetoresistance. J. Supercond. Novel Magn. 2020, 33, 3835–3840. [Google Scholar] [CrossRef]
- Sreevidya, P.V.; Borole, U.P.; Kadam, R.; Khan, J.; Barshilia, H.C.; Chowdhury, P. A novel AMR based angle sensor with reduced harmonic errors for automotive applications. Sens. Actuators A 2021, 324, 112573. [Google Scholar]
- Ouyang, Y.; Wang, Z.; Zhao, G.; Hu, J.; Ji, S.; He, J.; Wang, S.X. Current sensors based on GMR effect for smart grid applications. Sens. Actuators A 2019, 294, 8–16. [Google Scholar] [CrossRef]
- Schnitzspan, L.; Cramer, J.; Kubik, J.; Tarequzzaman, M.; Jakob, G.; Kläui, M. Impact of Annealing Temperature on Tunneling Magnetoresistance Multilayer Stacks. IEEE Magn. Lett. 2020, 11, 1–5. [Google Scholar] [CrossRef]
- Tumanski, S. Thin film magnetoresistive sensors; CRC Press: Boca Raton, FL, USA, 2001. [Google Scholar]
- Velev, J.; Sabirianov, R.F.; Jaswal, S.S.; Tsymbal, E.Y. Ballistic Anisotropic Magnetoresistance. Phys. Rev. Lett. 2005, 94, 127203. [Google Scholar] [CrossRef]
- Campbell, I.A.; Fert, A. Chapter 9 Transport properties of ferromagnets. In Handbook of Ferromagnetic Materials; Elsevier: Amsterdam, The Netherlands, 1982; Volume 3, pp. 747–804. [Google Scholar]
- Campbell, I.A.; Fert, A.; Jaoul, O. The spontaneous resistivity anisotropy in Ni-based alloys. J. Phys. C Solid State Phys. 1970, 3, S95–S101. [Google Scholar] [CrossRef]
- Kokado, S.; Tsunoda, M. Anisotropic Magnetoresistance Effect: General Expression of AMR Ratio and Intuitive Explanation for Sign of AMR Ratio. Adv. Mat. Res. 2013, 750–752, 978–982. [Google Scholar] [CrossRef]
- Zahn, P.; Binder, J.; Mertig, I.; Zeller, R.; Dederichs, P.H. Origin of Giant Magnetoresistance: Bulk or Interface Scattering. Phys. Rev. Lett. 1998, 80, 4309–4312. [Google Scholar] [CrossRef]
- Fert, A.; Campbell, I.A. Two-Current Conduction in Nickel. Phys. Rev. Lett. 1968, 21, 1190–1192. [Google Scholar] [CrossRef]
- Inoue, J.; Maekawa, S. Theory of tunneling magnetoresistance in granular magnetic films. Phys. Rev. B 1996, 53, R11927–R11929. [Google Scholar] [CrossRef] [PubMed]
- Zhu, J.-G.; Park, C. Magnetic tunnel junctions. Mater. Today 2006, 9, 36–45. [Google Scholar] [CrossRef]
- Guo, Y.; Deng, Y.; Wang, S.X. Multilayer anisotropic magnetoresistive angle sensor. Sens. Actuators A Phys. 2017, 263, 159–165. [Google Scholar] [CrossRef]
- Fullerton, E.E.; Childress, J.R. Spintronics, Magnetoresistive Heads, and the Emergence of the Digital World. Proc. IEEE 2016, 104, 1787–1795. [Google Scholar] [CrossRef]
- Berkowitz, A.E.; Mitchell, J.R.; Carey, M.J.; Young, A.P.; Zhang, S.; Spada, F.E.; Parker, F.T.; Hutten, A.; Thomas, G. Giant magnetoresistance in heterogeneous Cu-Co alloys. Phys. Rev. Lett. 1992, 68, 3745–3748. [Google Scholar] [CrossRef]
- Xiao, J.Q.; Jiang, J.S.; Chien, C.L. Giant magnetoresistance in nonmultilayer magnetic systems. Phys. Rev. Lett. 1992, 68, 3749–3752. [Google Scholar] [CrossRef] [PubMed]
- Zhou, B.H.; Rinehart, J.D. A Size Threshold for Enhanced Magnetoresistance in Colloidally Prepared CoFe2O4 Nanoparticle Solids. ACS Cent. Sci. 2018, 4, 1222–1227. [Google Scholar] [CrossRef]
- Novoselov, K.S.; Fal′ko, V.I.; Colombo, L.; Gellert, P.R.; Schwab, M.G.; Kim, K. A roadmap for graphene. Nature 2012, 490, 192–200. [Google Scholar] [CrossRef]
- Chen, J.-J.; Meng, J.; Zhou, Y.-B.; Wu, H.-C.; Bie, Y.-Q.; Liao, Z.-M.; Yu, D.-P. Layer-by-layer assembly of vertically conducting graphene devices. Nat. Commun. 2013, 4, 1921. [Google Scholar] [CrossRef]
- Sagar, R.U.R.; Qazi, H.I.A.; Zeb, M.H.; Stadler, F.J.; Shabbir, B.; Wang, X.; Zhang, M. Tunable sign of magnetoresistance in graphene foam – Ecoflex® composite for wearable magnetoelectronic devices. Mater. Lett. 2019, 253, 166–170. [Google Scholar] [CrossRef]
- Zhu, J.; Luo, Z.; Wu, S.; Haldolaarachchige, N.; Young, D.P.; Wei, S.; Guo, Z. Magnetic graphene nanocomposites: Electron conduction, giant magnetoresistance and tunable negative permittivity. J. Mater. Chem. 2012, 22, 835–844. [Google Scholar] [CrossRef]
- Rein, M.; Richter, N.; Parvez, K.; Feng, X.; Sachdev, H.; Kläui, M.; Müllen, K. Magnetoresistance and Charge Transport in Graphene Governed by Nitrogen Dopants. ACS Nano 2015, 9, 1360–1366. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Y.-B.; Han, B.-H.; Liao, Z.-M.; Wu, H.-C.; Yu, D.-P. From positive to negative magnetoresistance in graphene with increasing disorder. Appl. Phys. Lett. 2011, 98, 222502. [Google Scholar] [CrossRef]
- Gopinadhan, K.; Shin, Y.J.; Jalil, R.; Venkatesan, T.; Geim, A.K.; Neto, A.H.C.; Yang, H. Extremely large magnetoresistance in few-layer graphene/boron–nitride heterostructures. Nat. Commun. 2015, 6, 8337. [Google Scholar] [CrossRef]
- Asshoff, P.U.; Sambricio, J.L.; Rooney, A.P.; Slizovskiy, S.; Mishchenko, A.; Rakowski, A.M.; Hill, E.W.; Geim, A.K.; Haigh, S.J.; Fal’ko, V.I.; et al. Magnetoresistance of vertical Co-graphene-NiFe junctions controlled by charge transfer and proximity-induced spin splitting in graphene. 2D Mater. 2017, 4, 031004. [Google Scholar] [CrossRef]
- Huang, H.; Guan, H.; Su, M.; Zhang, X.; Liu, Y.; Liu, C.; Zhang, Z.; Liu, K.; Liao, L.; Tang, N. Gate-tunable linear magnetoresistance in molybdenum disulfide field-effect transistors with graphene insertion layer. Nano Res. 2020, 14, 1814–1818. [Google Scholar] [CrossRef]
- Cobas, E.D.; van ’t Erve, O.M.J.; Cheng, S.-F.; Culbertson, J.C.; Jernigan, G.G.; Bussman, K.; Jonker, B.T. Room-Temperature Spin Filtering in Metallic Ferromagnet–Multilayer Graphene–Ferromagnet Junctions. ACS Nano 2016, 10, 10357–10365. [Google Scholar] [CrossRef] [PubMed]
- Sagar, R.U.R.; Mahmood, N.; Stadler, F.J.; Anwar, T.; Navale, S.T.; Shehzad, K.; Du, B. High Capacity Retention Anode Material for Lithium Ion Battery. Electrochim. Acta 2016, 211, 156–163. [Google Scholar] [CrossRef]
- Chen, Z.; Ren, W.; Gao, L.; Liu, B.; Pei, S.; Cheng, H.-M. Three-dimensional flexible and conductive interconnected graphene networks grown by chemical vapour deposition. Nat. Mater. 2011, 10, 424–428. [Google Scholar] [CrossRef] [PubMed]
- Ma, Y.; Chen, Y. Three-dimensional graphene networks: Synthesis, properties and applications. Natl. Sci. Rev. 2015, 2, 40–53. [Google Scholar] [CrossRef]
- Krueger, E.; Chang, A.N.; Brown, D.; Eixenberger, J.; Brown, R.; Rastegar, S.; Yocham, K.M.; Cantley, K.D.; Estrada, D. Graphene Foam as a Three-Dimensional Platform for Myotube Growth. ACS Biomater. Sci. Eng. 2016, 2, 1234–1241. [Google Scholar] [CrossRef] [PubMed]
- Zeb, M.H.; Shabbir, B.; Sagar, R.U.R.; Mahmood, N.; Chen, K.; Qasim, I.; Malik, M.I.; Yu, W.; Hossain, M.M.; Dai, Z.; et al. Superior Magnetoresistance Performance of Hybrid Graphene Foam/Metal Sulfide Nanocrystal Devices. ACS Appl. Mater. Interfaces 2019, 11, 19397–19403. [Google Scholar] [CrossRef]
- Sagar, R.U.R.; Galluzzi, M.; García-Peñas, A.; Bhat, M.A.; Zhang, M.; Stadler, F.J. Large unsaturated room temperature negative magnetoresistance in graphene foam composite for wearable and flexible magnetoelectronics. Nano Res. 2019, 12, 101–107. [Google Scholar] [CrossRef]
- Sagar, R.U.R.; Galluzzi, M.; Wan, C.; Shehzad, K.; Navale, S.T.; Anwar, T.; Mane, R.S.; Piao, H.-G.; Ali, A.; Stadler, F.J. Large, Linear, and Tunable Positive Magnetoresistance of Mechanically Stable Graphene Foam–Toward High-Performance Magnetic Field Sensors. ACS Appl. Mater. Interfaces 2017, 9, 1891–1898. [Google Scholar] [CrossRef] [PubMed]
- Cai, C.-Y.; Chen, J.-H. Electronic transport properties of Co cluster-decorated graphene. Chin. Phys. B 2018, 27, 067304. [Google Scholar] [CrossRef]
- Chandni, U.; Henriksen, E.A.; Eisenstein, J.P. Transport in indium-decorated graphene. Phys. Rev. B 2015, 91, 245402. [Google Scholar] [CrossRef]
- Elias, J.A.; Henriksen, E.A. Electronic transport and scattering times in tungsten-decorated graphene. Phys. Rev. B 2017, 95, 075405. [Google Scholar] [CrossRef]
- Jia, Z.; Zhang, R.; Han, Q.; Yan, Q.; Zhu, R.; Yu, D.; Wu, X. Large tunable linear magnetoresistance in gold nanoparticle decorated graphene. Appl. Phys. Lett. 2014, 105, 143103. [Google Scholar] [CrossRef]
- Wang, Y.; Jaiswal, M.; Lin, M.; Saha, S.; Özyilmaz, B.; Loh, K.P. Electronic Properties of Nanodiamond Decorated Graphene. ACS Nano 2012, 6, 1018–1025. [Google Scholar] [CrossRef] [PubMed]
- Abellán, G.; Prima-García, H.; Coronado, E. Graphene enhances the magnetoresistance of FeNi3 nanoparticles in hierarchical FeNi3–graphene nanocomposites. J. Mater. Chem. C 2016, 4, 2252–2258. [Google Scholar] [CrossRef]
- Majumder, C.; Bhattacharya, S.; Saha, S.K. Anomalous large negative magnetoresistance in transition-metal decorated graphene: Evidence for electron-hole puddles. Phys. Rev. B 2019, 99, 045408. [Google Scholar] [CrossRef]
- Sheykhifard, Z.; Mohseni, S.M.; Tork, B.; Hajiali, M.R.; Jamilpanah, L.; Rahmati, B.; Haddadi, F.; Hamdi, M.; Mohseni, S.M.; Mohammadbeigi, M.; et al. Magnetic graphene/Ni-nano-crystal hybrid for small field magnetoresistive effect synthesized via electrochemical exfoliation/deposition technique. J. Mater. Sci. Mater. Electron. 2018, 29, 4171–4178. [Google Scholar] [CrossRef]
- Julliere, M. Tunneling between ferromagnetic films. Phys. Lett. A 1975, 54, 225–226. [Google Scholar] [CrossRef]
- Valet, T.; Fert, A. Theory of the perpendicular magnetoresistance in magnetic multilayers. Phys. Rev. B 1993, 48, 7099–7113. [Google Scholar] [CrossRef]
- Bass, J.; Pratt, W.P. Current-perpendicular (CPP) magnetoresistance in magnetic metallic multilayers. J. Magn. Magn. Mater. 1999, 200, 274–289. [Google Scholar] [CrossRef]
- Tsymbal, E.Y.; Pettifor, D.G. Perspectives of giant magnetoresistance. In Solid State Physics; Ehrenreich, H., Spaepen, F., Eds.; Academic Press: Amsterdam, The Netherlands, 2001; Volume 56, pp. 113–237. [Google Scholar]
- Kąc, M.; Morgiel, J.; Polit, A.; Zabila, Y.; Marszałek, M. Atomic scale structure investigations of epitaxial Fe/Cr multilayers. Appl. Surf. Sci. 2014, 305, 154–159. [Google Scholar] [CrossRef]
- Kąc, M.; Polit, A.; Dobrowolska, A.; Zabila, Y.; Krupiński, M.; Marszałek, M. Surfactant influence on interface roughness and magnetoresistance value in Fe/Cr multilayers. Thin Solid Films 2013, 542, 199–203. [Google Scholar] [CrossRef]
- Chang, C.-L.; Chiou, T.-H.; Chen, P.-H.; Chen, W.-C.; Ho, C.-T.; Wu, W.-Y. Characteristics of TiN/W2N multilayers prepared using magnetron sputter deposition with dc and pulsed dc powers. Surf. Coat. Technol. 2016, 303, 25–31. [Google Scholar] [CrossRef]
- Saoula, N.; Djerourou, S.; Yahiaoui, K.; Henda, K.; Kesri, R.; Erasmus, R.M.; Comins, J.D. Study of the deposition of Ti/TiN multilayers by magnetron sputtering. Surf. Interface Anal. 2010, 42, 1176–1179. [Google Scholar] [CrossRef]
- Schubert, E.; Frost, F.; Ziberi, B.; Wagner, G.; Neumann, H.; Rauschenbach, B. Ion beam sputter deposition of soft x-ray Mo∕Si multilayer mirrors. J. Vac. Sci. Technol. B Microelectron. Nanometer Struct. Process. Meas. Phenom. 2005, 23, 959–965. [Google Scholar] [CrossRef]
- Chiu, P.-K.; Lee, C.-T.; Chiang, D.; Cho, W.-H.; Hsiao, C.-N.; Chen, Y.-Y.; Huang, B.-M.; Yang, J.-R. Conductive and transparent multilayer films for low-temperature TiO2/Ag/SiO2 electrodes by E-beam evaporation with IAD. Nanoscale Res. Lett. 2014, 9, 35. [Google Scholar] [CrossRef]
- Kąc, M.; Żukrowski, J.; Toulemonde, M.; Kruk, R.; Tokman, V.; Polit, A.; Zabila, Y.; Dobrowolska, A.; Synashenko, O.; Marszałek, M. Swift iodine ion modification of the structural and magnetotransport properties of Fe/Cr systems. Nucl. Instrum. Methods Phys. Res. B 2009, 267, 925–930. [Google Scholar] [CrossRef][Green Version]
- Bakonyi, I.; Péter, L. Electrodeposited multilayer films with giant magnetoresistance (GMR): Progress and problems. Prog. Mater. Sci. 2010, 55, 107–245. [Google Scholar] [CrossRef]
- Liu, L.; Zhan, Q.; Yang, H.; Li, H.; Zhang, S.; Liu, Y.; Wang, B.; Tan, X.; Li, R.-W. Magnetostrictive GMR spin valves with composite FeGa/FeCo free layers. AIP Adv. 2016, 6, 035206. [Google Scholar] [CrossRef]
- Zhang, X.G.; Butler, W.H. Large magnetoresistance in bcc Co/MgO/Co and FeCo/MgO/FeCo tunnel junctions. Phys. Rev. B 2004, 70, 172407. [Google Scholar] [CrossRef]
- Sundar, R.S.; Deevi, S.C. Soft magnetic FeCo alloys: Alloy development, processing, and properties. Int. Mater. Rev. 2005, 50, 157–192. [Google Scholar] [CrossRef]
- Reig, C.; Cubells-Beltrán, M.-D. Giant Magnetoresistance (GMR) Magnetometers. In High Sensitivity Magnetometers; Grosz, A., Haji-Sheikh, M.J., Mukhopadhyay, S.C., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 225–252. [Google Scholar]
- Jin, Z.; Mohd Noor Sam, M.A.I.; Oogane, M.; Ando, Y. Serial MTJ-Based TMR Sensors in Bridge Configuration for Detection of Fractured Steel Bar in Magnetic Flux Leakage Testing. Sensors 2021, 21, 668. [Google Scholar] [CrossRef] [PubMed]
- Coey, J.M.D.; Berkowitz, A.E.; Balcells, L.; Putris, F.F.; Parker, F.T. Magnetoresistance of magnetite. Appl. Phys. Lett. 1998, 72, 734–736. [Google Scholar] [CrossRef]
- Zhang, D.; Liu, Z.; Han, S.; Li, C.; Lei, B.; Stewart, M.P.; Tour, J.M.; Zhou, C. Magnetite (Fe3O4) Core−Shell Nanowires: Synthesis and Magnetoresistance. Nano Lett. 2004, 4, 2151–2155. [Google Scholar] [CrossRef]
- Mi, S.; Xie, Y.; Li, Y.; Liu, R.; Liu, X.; Smalyukh, I.I.; Chen, Z. The Effect of Thickness-Tunable ZrO2 Shell on Enhancing the Tunneling Magnetoresistance of Fe3O4 Supraparticles. Adv. Mater. Interfaces 2018, 5, 1800236. [Google Scholar] [CrossRef]
- Liu, E.; Yuan, H.; Kou, Z.; Wu, X.; Xu, Q.; Zhai, Y.; Sui, Y.; You, B.; Du, J.; Zhai, H. Investigation on Spin Dependent Transport Properties of Core-Shell Structural Fe3O4/ZnS Nanocomposites for Spintronic Application. Sci. Rep. 2015, 5, 11164. [Google Scholar] [CrossRef]
- Fan, Z.W.; Li, P.; Jiang, E.Y.; Bai, H.L. Evolution of magnetoresistance mechanisms in granular Co/C films with different conduction regimes. J. Phys. D Appl. Phys. 2013, 46, 065002. [Google Scholar] [CrossRef]
- Quan, Z.; Zhang, X.; Liu, W.; Li, X.; Addison, K.; Gehring, G.A.; Xu, X. Enhanced Room Temperature Magnetoresistance and Spin Injection from Metallic Cobalt in Co/ZnO and Co/ZnAlO Films. ACS Appl. Mater. Interfaces 2013, 5, 3607–3613. [Google Scholar] [CrossRef]
- Gerber, A.; Milner, A.; Groisman, B.; Karpovsky, M.; Gladkikh, A.; Sulpice, A. Magnetoresistance of granular ferromagnets. Phys. Rev. B 1997, 55, 6446–6452. [Google Scholar] [CrossRef]
- Gack, N.; Iankevich, G.; Benel, C.; Kruk, R.; Wang, D.; Hahn, H.; Reisinger, T. Magnetotransport Properties of Ferromagnetic Nanoparticles in a Semiconductor Matrix Studied by Precise Size-Selective Cluster Ion Beam Deposition. Nanomaterials 2020, 10, 2192. [Google Scholar] [CrossRef] [PubMed]
- Leveneur, J.; Kennedy, J.; Williams, G.V.M.; Metson, J.; Markwitz, A. Large room temperature magnetoresistance in ion beam synthesized surface Fe nanoclusters on SiO2. Appl. Phys. Lett. 2011, 98, 053111. [Google Scholar] [CrossRef]
- Zeng, Y.P.; Liu, Z.W.; Yu, H.Y.; Zheng, Z.G.; Zeng, D.C.; Gao, X.S. Large positive room temperature magnetoresistance in nanogranular FeCo–Si–N thin films. Mater. Lett. 2013, 110, 27–30. [Google Scholar] [CrossRef]
- Fukuzawa, H.; Yuasa, H.; Iwasaki, H. CPP-GMR films with a current-confined-path nano-oxide layer (CCP-NOL). J. Phys. D Appl. Phys. 2007, 40, 1213–1220. [Google Scholar] [CrossRef]
- Chaubey, G.S.; Barcena, C.; Poudyal, N.; Rong, C.; Gao, J.; Sun, S.; Liu, J.P. Synthesis and Stabilization of FeCo Nanoparticles. J. Am. Chem. Soc. 2007, 129, 7214–7215. [Google Scholar] [CrossRef]
- Zeng, Y.P.; Liu, Z.W.; Mikmeková, E. Magnetoresistance effects associated with various electric conduction mechanisms in nanostructured [C/FeCo]n multilayers. J. Magn. Magn. Mater. 2017, 421, 39–43. [Google Scholar] [CrossRef]
- Wang, C.; Xiao, X.; Rong, Y.; Hsu, T.Y. The effect of substrate temperature on the microstructure and tunnelling magnetoresistance of FeCo–Al2O3 nanogranular films. J. Mater. Sci. 2006, 41, 3873–3879. [Google Scholar] [CrossRef]
- Ge, S.-H.; Zhang, Z.-Z.; Lu, Y.-Y.; Li, C.-x.; Run-jin, G. Influence of annealing condition on giant magnetoresistance of FeCo–Cu granular films. Thin Solid Films 1997, 311, 33–37. [Google Scholar] [CrossRef]
- Wang, C.; Xiao, X.; Rong, Y.; Hsu, H.Y. Nanoparticle morphology in FeCo–SiO2 granular films with tunneling giant magnetoresistance. Mater. Sci. Eng. B 2007, 141, 126–131. [Google Scholar] [CrossRef]
- Novoselov, K.S.; Geim, A.K.; Morozov, S.V.; Jiang, D.; Zhang, Y.; Dubonos, S.V.; Grigorieva, I.V.; Firsov, A.A. Electric Field Effect in Atomically Thin Carbon Films. Science 2004, 306, 666–669. [Google Scholar] [CrossRef]
- Wu, H.-C.; Chaika, A.N.; Hsu, M.-C.; Huang, T.-W.; Abid, M.; Abid, M.; Aristov, V.Y.; Molodtsova, O.V.; Babenkov, S.V.; Niu, Y.; et al. Large positive in-plane magnetoresistance induced by localized states at nanodomain boundaries in graphene. Nat. Commun. 2017, 8, 14453. [Google Scholar] [CrossRef]
- Castro Neto, A.H.; Guinea, F.; Peres, N.M.R.; Novoselov, K.S.; Geim, A.K. The electronic properties of graphene. Rev. Mod. Phys. 2009, 81, 109–162. [Google Scholar] [CrossRef]
- Katsnelson, M.I. Graphene: Carbon in two dimensions. Mater. Today 2007, 10, 20–27. [Google Scholar] [CrossRef]
- Bodepudi, S.C.; Singh, A.P.; Pramanik, S. Current-Perpendicular-to-Plane Magnetoresistance in Chemical Vapor Deposition-Grown Multilayer Graphene. Electronics 2013, 2, 315–331. [Google Scholar] [CrossRef]
- Friedman, A.L.; Tedesco, J.L.; Campbell, P.M.; Culbertson, J.C.; Aifer, E.; Perkins, F.K.; Myers-Ward, R.L.; Hite, J.K.; Eddy, C.R.; Jernigan, G.G.; et al. Quantum Linear Magnetoresistance in Multilayer Epitaxial Graphene. Nano Lett. 2010, 10, 3962–3965. [Google Scholar] [CrossRef]
- Gopinadhan, K.; Shin, Y.J.; Yudhistira, I.; Niu, J.; Yang, H. Giant magnetoresistance in single-layer graphene flakes with a gate-voltage-tunable weak antilocalization. Phys. Rev. B 2013, 88, 195429. [Google Scholar] [CrossRef]
- Kisslinger, F.; Ott, C.; Heide, C.; Kampert, E.; Butz, B.; Spiecker, E.; Shallcross, S.; Weber, H.B. Linear magnetoresistance in mosaic-like bilayer graphene. Nat. Phys. 2015, 11, 650–653. [Google Scholar] [CrossRef]
- Hu, J.; Gou, J.; Yang, M.; Omar, G.J.; Tan, J.; Zeng, S.; Liu, Y.; Han, K.; Lim, Z.; Huang, Z.; et al. Room-Temperature Colossal Magnetoresistance in Terraced Single-Layer Graphene. Adv. Mater. 2020, 32, 2002201. [Google Scholar] [CrossRef] [PubMed]
- Shehzad, K.; Xu, Y.; Gao, C.; Duan, X. Three-dimensional macro-structures of two-dimensional nanomaterials. Chem. Soc. Rev. 2016, 45, 5541–5588. [Google Scholar] [CrossRef] [PubMed]
- Jayanthi, S.; Mukherjee, A.; Chatterjee, K.; Sood, A.K.; Misra, A. Tailored nitrogen dioxide sensing response of three-dimensional graphene foam. Sens. Actuators B 2016, 222, 21–27. [Google Scholar] [CrossRef]
- Zhang, Y.; Tang, T.-T.; Girit, C.; Hao, Z.; Martin, M.C.; Zettl, A.; Crommie, M.F.; Shen, Y.R.; Wang, F. Direct observation of a widely tunable bandgap in bilayer graphene. Nature 2009, 459, 820–823. [Google Scholar] [CrossRef]
- Lui, C.H.; Li, Z.; Mak, K.F.; Cappelluti, E.; Heinz, T.F. Observation of an electrically tunable band gap in trilayer graphene. Nat. Phys. 2011, 7, 944–947. [Google Scholar] [CrossRef]
- Xu, G.; Torres, C.M.; Tang, J.; Bai, J.; Song, E.B.; Huang, Y.; Duan, X.; Zhang, Y.; Wang, K.L. Edge Effect on Resistance Scaling Rules in Graphene Nanostructures. Nano Lett. 2011, 11, 1082–1086. [Google Scholar] [CrossRef]
- Murdock, A.T.; Koos, A.; Britton, T.B.; Houben, L.; Batten, T.; Zhang, T.; Wilkinson, A.J.; Dunin-Borkowski, R.E.; Lekka, C.E.; Grobert, N. Controlling the Orientation, Edge Geometry, and Thickness of Chemical Vapor Deposition Graphene. ACS Nano 2013, 7, 1351–1359. [Google Scholar] [CrossRef]
- Sagar, R.R.; Zhang, X.; Xiong, C. Growth of graphene on copper and nickel foils via chemical vapour deposition using ethylene. Mater. Res. Innov. 2014, 18, S4–S706. [Google Scholar] [CrossRef]
- Li, P.; Zhang, Q.; He, X.; Ren, W.; Cheng, H.-M.; Zhang, X.-x. Spatial mobility fluctuation induced giant linear magnetoresistance in multilayered graphene foam. Phys. Rev. B 2016, 94, 045402. [Google Scholar] [CrossRef]
- Rehman Sagar, R.U.; Shehzad, K.; Ali, A.; Stadler, F.J.; Khan, Q.; Zhao, J.; Wang, X.; Zhang, M. Defect-induced, temperature-independent, tunable magnetoresistance of partially fluorinated graphene foam. Carbon 2019, 143, 179–188. [Google Scholar] [CrossRef]
- Liu, Y.; Dong, X.; Chen, P. Biological and chemical sensors based on graphene materials. Chem. Soc. Rev. 2012, 41, 2283–2307. [Google Scholar] [CrossRef] [PubMed]
- Zhang, M.; Li, Y.; Su, Z.; Wei, G. Recent advances in the synthesis and applications of graphene–polymer nanocomposites. Polym. Chem. 2015, 6, 6107–6124. [Google Scholar] [CrossRef]
- Lu, Y.; Goldsmith, B.R.; Kybert, N.J.; Johnson, A.T.C. DNA-decorated graphene chemical sensors. Appl. Phys. Lett. 2010, 97, 083107. [Google Scholar] [CrossRef]
- Krishnan, S.K.; Singh, E.; Singh, P.; Meyyappan, M.; Nalwa, H.S. A review on graphene-based nanocomposites for electrochemical and fluorescent biosensors. RSC Adv. 2019, 9, 8778–8881. [Google Scholar] [CrossRef]
- Stark, W.J. Nanoparticles in Biological Systems. Angew. Chem. Int. Ed. 2011, 50, 1242–1258. [Google Scholar] [CrossRef]
- Xu, H.-L.; Bi, H.; Yang, R.-B. Enhanced microwave absorption property of bowl-like Fe3O4 hollow spheres/reduced graphene oxide composites. J. Appl. Phys. 2012, 111, 07A522. [Google Scholar] [CrossRef]
- Pumera, M. Graphene in biosensing. Mater. Today 2011, 14, 308–315. [Google Scholar] [CrossRef]
- Guo, W.; Zhao, B.; Zhou, Q.; He, Y.; Wang, Z.; Radacsi, N. Fe-Doped ZnO/Reduced Graphene Oxide Nanocomposite with Synergic Enhanced Gas Sensing Performance for the Effective Detection of Formaldehyde. ACS Omega 2019, 4, 10252–10262. [Google Scholar] [CrossRef]
- Wang, D.; Kou, R.; Choi, D.; Yang, Z.; Nie, Z.; Li, J.; Saraf, L.V.; Hu, D.; Zhang, J.; Graff, G.L.; et al. Ternary Self-Assembly of Ordered Metal Oxide−Graphene Nanocomposites for Electrochemical Energy Storage. ACS Nano 2010, 4, 1587–1595. [Google Scholar] [CrossRef]
- Zhang, Y.; Shu, H.; Chang, G.; Ji, K.; Oyama, M.; Liu, X.; He, Y. Facile synthesis of palladium–graphene nanocomposites and their catalysis for electro-oxidation of methanol and ethanol. Electrochim. Acta 2013, 109, 570–576. [Google Scholar] [CrossRef]
- Paredes, J.I.; Villar-Rodil, S.; Fernández-Merino, M.J.; Guardia, L.; Martínez-Alonso, A.; Tascón, J.M.D. Environmentally friendly approaches toward the mass production of processable graphene from graphite oxide. J. Mater. Chem. 2011, 21, 298–306. [Google Scholar] [CrossRef]
- Weiss, R.; Mattheis, R.; Reiss, G. Advanced giant magnetoresistance technology for measurement applications. Meas. Sci. Technol. 2013, 24, 082001. [Google Scholar] [CrossRef]
- Parkin, S.S.P.; More, N.; Roche, K.P. Oscillations in exchange coupling and magnetoresistance in metallic superlattice structures: Co/Ru, Co/Cr, and Fe/Cr. Phys. Rev. Lett. 1990, 64, 2304–2307. [Google Scholar] [CrossRef]
- Gregg, J.F.; Petej, I.; Jouguelet, E.; Dennis, C. Spin electronics-a review. J. Phys. D Appl. Phys. 2002, 35, R121–R155. [Google Scholar] [CrossRef]
- Parkin, S.S.P.; Hayashi, M.; Thomas, L. Magnetic Domain-Wall Racetrack Memory. Science 2008, 320, 190–194. [Google Scholar] [CrossRef] [PubMed]
- Ausserlechner, U. The Optimum Layout for Giant Magneto-Resistive Angle Sensors. IEEE Sens. J. 2010, 10, 1571–1582. [Google Scholar] [CrossRef]
- Wu, S.; Chen, J.; Wu, S. A Rotary Encoder With an Eccentrically Mounted Ring Magnet. IEEE Trans. Instrum. Meas. 2014, 63, 1907–1915. [Google Scholar] [CrossRef]
- Hahn, R.; Schmidt, T.; Slatter, R.; Olberts, B.; Romera, F. Magneto-Resistive Angular Sensors for Space Applications: Results of Breadboard and EQM Testing and Lessons Learned. In Proceedings of the 17th European Space Mechanisms and Tribology Symposium, Hertfordshire, UK, 20–22 September 2017; pp. 20–22. [Google Scholar]
- Rempt, R. Scanning with magnetoresistive sensors for subsurface corrosion. AIP Conf. Proc. 2002, 615, 1771–1778. [Google Scholar]
- Wincheski, B.; Simpson, J.; Namkung, M.; Perey, D.; Scales, E.; Louie, R. Development of Giant Magnetoresistive inspection system for detection of deep fatigue cracks under airframe fasteners. AIP Conf. Proc. 2002, 615, 1007–1014. [Google Scholar]
- Gaster, R.S.; Hall, D.A.; Nielsen, C.H.; Osterfeld, S.J.; Yu, H.; Mach, K.E.; Wilson, R.J.; Murmann, B.; Liao, J.C.; Gambhir, S.S.; et al. Matrix-insensitive protein assays push the limits of biosensors in medicine. Nat. Med. 2009, 15, 1327–1332. [Google Scholar] [CrossRef] [PubMed]
- Giebeler, C.; Adelerhof, D.J.; Kuiper, A.E.T.; van Zon, J.B.A.; Oelgeschläger, D.; Schulz, G. Robust GMR sensors for angle detection and rotation speed sensing. Sens. Actuators A 2001, 91, 16–20. [Google Scholar] [CrossRef]
- Rieger, G.; Ludwig, K.; Hauch, J.; Clemens, W. GMR sensors for contactless position detection. Sens. Actuators A 2001, 91, 7–11. [Google Scholar] [CrossRef]
- Hermann, T.M.; Black, W.C.; Hui, S. Magnetically coupled linear isolator. IEEE Trans. Magn. 1997, 33, 4029–4031. [Google Scholar] [CrossRef]
- Rife, J.C.; Miller, M.M.; Sheehan, P.E.; Tamanaha, C.R.; Tondra, M.; Whitman, L.J. Design and performance of GMR sensors for the detection of magnetic microbeads in biosensors. Sens. Actuators A 2003, 107, 209–218. [Google Scholar] [CrossRef]
- Hall, D.A.; Gaster, R.S.; Lin, T.; Osterfeld, S.J.; Han, S.; Murmann, B.; Wang, S.X. GMR biosensor arrays: A system perspective. Biosens. Bioelectron. 2010, 25, 2051–2057. [Google Scholar] [CrossRef] [PubMed]
- Pannetier-Lecoeur, M.; Parkkonen, L.; Sergeeva-Chollet, N.; Polovy, H.; Fermon, C.; Fowley, C. Magnetocardiography with sensors based on giant magnetoresistance. Appl. Phys. Lett. 2011, 98, 153705. [Google Scholar] [CrossRef]
- Shirai, Y.; Hirao, K.; Shibuya, T.; Okawa, S.; Hasegawa, Y.; Adachi, Y.; Sekihara, K.; Kawabata, S. Magnetocardiography Using a Magnetoresistive Sensor Array. Int. Heart J. 2019, 60, 50–54. [Google Scholar] [CrossRef] [PubMed]
- Dixon, R. Magnetic Sensors Report. Available online: https://cdn.ihs.com/www/pdf/1118/ABSTRACT-Magnetic-Sensors%20Report-2017.pdf (accessed on 27 August 2020).
- Hoagland, A.S. History of magnetic disk storage based on perpendicular magnetic recording. IEEE Trans. Magn. 2003, 39, 1871–1875. [Google Scholar] [CrossRef]
- Tsang, C.; Chen, M.; Yogi, T.; Ju, K. Gigabit density recording using dual-element MR/inductive heads on thin-film disks. IEEE Trans. Magn. 1990, 26, 1689–1693. [Google Scholar] [CrossRef]
- Heim, D.E.; Fontana, R.E.; Tsang, C.; Speriosu, V.S.; Gurney, B.A.; Williams, M.L. Design and operation of spin valve sensors. IEEE Trans. Magn. 1994, 30, 316–321. [Google Scholar] [CrossRef]
- Maat, S.; Marley, A.C. Physics and Design of Hard Disk Drive Magnetic Recording Read Heads. In Handbook of Spintronics; Xu, Y., Awschalom, D.D., Nitta, J., Eds.; Springer Netherlands: Dordrecht, The Netherlands, 2013; pp. 1–45. [Google Scholar]
- Parkin, S.S.P.; Roche, K.P.; Samant, M.G.; Rice, P.M.; Beyers, R.B.; Scheuerlein, R.E.; O’Sullivan, E.J.; Brown, S.L.; Bucchigano, J.; Abraham, D.W.; et al. Exchange-biased magnetic tunnel junctions and application to nonvolatile magnetic random access memory (invited). J. Appl. Phys. 1999, 85, 5828–5833. [Google Scholar] [CrossRef]
- Parkin, S.; Xin, J.; Kaiser, C.; Panchula, A.; Roche, K.; Samant, M. Magnetically engineered spintronic sensors and memory. Proc. IEEE 2003, 91, 661–680. [Google Scholar] [CrossRef]
- Tehrani, S. Status and Outlook of MRAM Memory Technology (Invited). In Proceedings of the 2006 International Electron Devices Meeting, San Francisco, CA, USA, 11–13 December 2006; pp. 1–4. [Google Scholar]
- Salehi, S.; Fan, D.; Demara, R.F. Survey of STT-MRAM Cell Design Strategies: Taxonomy and Sense Amplifier Tradeoffs for Resiliency. J. Emerg. Technol. Comput. Syst. 2017, 13, 1–16. [Google Scholar] [CrossRef]
- Sbiaa, R.; Piramanayagam, S.N. Recent Developments in Spin Transfer Torque MRAM. Phys. Status Solidi RRL 2017, 11, 1700163. [Google Scholar] [CrossRef]
- Tsukada, K.; Hayashi, M.; Nakamura, Y.; Sakai, K.; Kiwa, T. Small Eddy Current Testing Sensor Probe Using a Tunneling Magnetoresistance Sensor to Detect Cracks in Steel Structures. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar] [CrossRef]
- Wang, S.; Wu, Z.; Peng, D.; Li, W.; Zheng, Y. Embedded position estimation using tunnel magnetoresistance sensors for permanent magnet linear synchronous motor systems. Measurement 2019, 147, 106860. [Google Scholar] [CrossRef]
- Reig, C.; Cubells-Beltrán, M.-D.; Ramírez Muñoz, D. Magnetic Field Sensors Based on Giant Magnetoresistance (GMR) Technology: Applications in Electrical Current Sensing. Sensors 2009, 9, 7919–7942. [Google Scholar] [CrossRef]
- Babaytsev, G.V.; Chechenin, N.G.; Dzhun, I.O.; Kozin, M.G.; Makunin, A.V.; Romashkina, I.L. Clusters of Spin Valve Sensors in 3D Magnetic Field of a Label. Sensors 2021, 21, 3595. [Google Scholar] [CrossRef]
- Chen, Z.; Shi, H.; Zhao, C.; Chen, Y. Simulation and Design of DC Sensor Based on Tunnel Magnetoresistance. J. Phys. Conf. Ser. 2021, 1746, 012023. [Google Scholar] [CrossRef]
- Liu, L.; Yang, Y.; Yang, B. Non-contact and high-precision displacement measurement based on tunnel magnetoresistance. Meas. Sci. Technol. 2020, 31, 065102. [Google Scholar] [CrossRef]
- Lee, C.-C.; Yen, Y.-S.; Lai, C.-H. Alignment-Free Sensing Module for Absolute and Incremental Lines in Linear Positioning System Based on Tunneling-Magnetoresistance Sensors. Sensors 2021, 21, 4137. [Google Scholar] [CrossRef]
- Peng, K.-Y.; Chang, J.-Y. Effects of assembly errors on axial positioning accuracy for rotating machinery with magnetoresistance-based magnetic encoders. Microsyst. Technol. 2021, 27, 2507–2514. [Google Scholar] [CrossRef]
- Reig, C.; Pardo, F.; Boluda, J.A.; Vegara, F.; Cubells-Beltrán, M.D.; Sanchis, J.; Abrunhosa, S.; Cardoso, S. Advanced Giant Magnetoresistance (GMR) sensors for Selective-Change Driven (SCD) circuits. In Proceedings of the 2021 13th Spanish Conference on Electron Devices (CDE), Sevilla, Spain, 9–11 June 2021; pp. 58–61. [Google Scholar]
- Xu, X.P.; Wang, S.; Liu, T.Z.; Zhu, M.; Wang, J.G. TMR Busbar Current Sensor With Good Frequency Characteristics. IEEE Trans. Instrum. Meas. 2021, 70, 1–9. [Google Scholar]
- Mușuroi, C.; Oproiu, M.; Volmer, M.; Neamtu, J.; Avram, M.; Helerea, E. Low Field Optimization of a Non-Contacting High-Sensitivity GMR-Based DC/AC Current Sensor. Sensors 2021, 21, 2564. [Google Scholar] [CrossRef]
- Lenz, J.; Edelstein, S. Magnetic sensors and their applications. IEEE Sens. J. 2006, 6, 631–649. [Google Scholar] [CrossRef]
- Slatter, R. A6.1-Highly integrated magnetoresistive sensors in aerospace applications. Proc. SENSOR 2013, 2013, 126–131. [Google Scholar]
- Ripka, P.; Janosek, M. Advances in Magnetic Field Sensors. IEEE Sens. J. 2010, 10, 1108–1116. [Google Scholar] [CrossRef]
- Arana, S.; Arana, N.; Gracia, F.J.; Castaño, E. High sensitivity linear position sensor developed using granular Ag–Co giant magnetoresistances. Sens. Actuators A 2005, 123–124, 116–121. [Google Scholar] [CrossRef]
- Stritzke, B.; Brode, C.; Danowski, M. A6.2-Highly flexible absolute integrated encoder system on GMR-basis. Proc. SENSOR 2013, 2013, 132–137. [Google Scholar]
- Albon, C.; Weddemann, A.; Auge, A.; Rott, K.; Hütten, A. Tunneling magnetoresistance sensors for high resolutive particle detection. Appl. Phys. Lett. 2009, 95, 023101. [Google Scholar] [CrossRef]
- Luong, V.; Jeng, J.; Lai, B.; Hsu, J.; Chang, C.; Lu, C. Design of 3-D Magnetic Field Sensor With Single Bridge of Spin-Valve Giant Magnetoresistance Films. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Zhang, N.; Ye, C.; Peng, L.; Tao, Y. Eddy Current Probe with Three-Phase Excitation and Integrated Array Tunnel Magnetoresistance Sensors. ITIE 2021, 68, 5325–5336. [Google Scholar]
- Ouyang, Y.; He, J.; Hu, J.; Wang, S.X. A Current Sensor Based on the Giant Magnetoresistance Effect: Design and Potential Smart Grid Applications. Sensors 2012, 12, 15520–15541. [Google Scholar] [CrossRef] [PubMed]
- Rifai, D.; Abdalla, A.N.; Ali, K.; Razali, R. Giant Magnetoresistance Sensors: A Review on Structures and Non-Destructive Eddy Current Testing Applications. Sensors 2016, 16, 298. [Google Scholar] [CrossRef] [PubMed]
- Zheng, C.; Zhu, K.; Freitas, S.C.d.; Chang, J.Y.; Davies, J.E.; Eames, P.; Freitas, P.P.; Kazakova, O.; Kim, C.; Leung, C.W.; et al. Magnetoresistive Sensor Development Roadmap (Non-Recording Applications). IEEE Trans. Magn. 2019, 55, 1–30. [Google Scholar] [CrossRef]
- Pelkner, M.; Neubauer, A.; Reimund, V.; Kreutzbruck, M.; Schütze, A. Routes for GMR-Sensor Design in Non-Destructive Testing. Sensors 2012, 12, 12169–12183. [Google Scholar] [CrossRef]
- Bernieri, A.; Ferrigno, L.; Laracca, M.; Rasile, A. Eddy Current Testing Probe Based on Double-Coil Excitation and GMR Sensor. IEEE Trans. Instrum. Meas. 2019, 68, 1533–1542. [Google Scholar] [CrossRef]
- Schotter, J.; Kamp, P.B.; Becker, A.; Pühler, A.; Reiss, G.; Brückl, H. Comparison of a prototype magnetoresistive biosensor to standard fluorescent DNA detection. Biosens. Bioelectron. 2004, 19, 1149–1156. [Google Scholar] [CrossRef] [PubMed]
- Wu, K.; Saha, R.; Su, D.; Krishna, V.D.; Liu, J.; Cheeran, M.C.J.; Wang, J.-P. Magnetic-Nanosensor-Based Virus and Pathogen Detection Strategies before and during COVID-19. ACS Appl. Nano Mater. 2020, 3, 9560–9580. [Google Scholar] [CrossRef]
- Hall, D.A.; Gaster, R.S.; Makinwa, K.A.A.; Wang, S.X.; Murmann, B. A 256 Pixel Magnetoresistive Biosensor Microarray in 0.18 µm CMOS. IEEE J. Solid-State Circuits 2013, 48, 1290–1301. [Google Scholar] [CrossRef]
- Chou, J.; Wu, C.; Kuo, P.; Lai, C.; Nien, Y.; Wu, Y.; Lin, S.; Liao, Y. The Flexible Urea Biosensor Using Magnetic Nanoparticles. IEEE Trans. Nanotechnol. 2019, 18, 484–490. [Google Scholar] [CrossRef]
- Baselt, D.R.; Lee, G.U.; Natesan, M.; Metzger, S.W.; Sheehan, P.E.; Colton, R.J. A biosensor based on magnetoresistance technology. Biosens. Bioelectron. 1998, 13, 731–739. [Google Scholar] [CrossRef]
- Freitas, P.P.; Cardoso, F.A.; Martins, V.C.; Martins, S.A.M.; Loureiro, J.; Amaral, J.; Chaves, R.C.; Cardoso, S.; Fonseca, L.P.; Sebastião, A.M.; et al. Spintronic platforms for biomedical applications. Lab Chip 2012, 12, 546–557. [Google Scholar] [CrossRef]
- Lagaron, J.M.; Cabedo, L.; Cava, D.; Feijoo, J.L.; Gavara, R.; Gimenez, E. Improving packaged food quality and safety. Part 2: Nanocomposites. Food Addit. Contam. 2005, 22, 994–998. [Google Scholar] [CrossRef]
- Ren, C.; Bayin, Q.; Feng, S.; Fu, Y.; Ma, X.; Guo, J. Biomarkers detection with magnetoresistance-based sensors. Biosens. Bioelectron. 2020, 165, 112340. [Google Scholar] [CrossRef] [PubMed]
- Ng, E.; Le, A.K.; Nguyen, M.H.; Wang, S.X. Early Multiplexed Detection of Cirrhosis using Giant Magnetoresistive Biosensors with Protein Biomarkers. ACS Sens. 2020, 5, 3049–3057. [Google Scholar] [CrossRef] [PubMed]
- Adem, S.; Jain, S.; Sveiven, M.; Zhou, X.; O’Donoghue, A.J.; Hall, D.A. Giant magnetoresistive biosensors for real-time quantitative detection of protease activity. Sci. Rep. 2020, 10, 7941. [Google Scholar] [CrossRef]
- Meng, F.; Zhang, L.; Huo, W.; Lian, J.; Jesorka, A.; Shi, X.; Gao, Y. Dynamic Range Expansion of the C-Reactive Protein Quantification with a Tandem Giant Magnetoresistance Biosensor. ACS Omega 2021, 6, 12923–12930. [Google Scholar] [CrossRef]
- Meng, F.; Huo, W.; Lian, J.; Zhang, L.; Shi, X.; Jesorka, A.; Gao, Y. A tandem giant magnetoresistance assay for one-shot quantification of clinically relevant concentrations of N-terminal pro-B-type natriuretic peptide in human blood. Anal. Bioanal. Chem. 2021, 413, 2943–2949. [Google Scholar] [CrossRef]
- Zhu, F.; Li, D.; Ding, Q.; Lei, C.; Ren, L.; Ding, X.; Sun, X. 2D magnetic MoS2–Fe3O4 hybrid nanostructures for ultrasensitive exosome detection in GMR sensor. Biosens. Bioelectron. 2020, 147, 111787. [Google Scholar] [CrossRef]
- Mulvaney, S.P.; Cole, C.L.; Kniller, M.D.; Malito, M.; Tamanaha, C.R.; Rife, J.C.; Stanton, M.W.; Whitman, L.J. Rapid, femtomolar bioassays in complex matrices combining microfluidics and magnetoelectronics. Biosens. Bioelectron. 2007, 23, 191–200. [Google Scholar] [CrossRef]
- Graham, D.L.; Ferreira, H.A.; Freitas, P.P.; Cabral, J.M.S. High sensitivity detection of molecular recognition using magnetically labelled biomolecules and magnetoresistive sensors. Biosens. Bioelectron. 2003, 18, 483–488. [Google Scholar] [CrossRef]
- Srinivasan, B.; Li, Y.; Jing, Y.; Xing, C.; Slaton, J.; Wang, J.-P. A Three-Layer Competition-Based Giant Magnetoresistive Assay for Direct Quantification of Endoglin from Human Urine. Anal. Chem. 2011, 83, 2996–3002. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Wang, W.; Yu, L.; Tu, L.; Feng, Y.; Klein, T.; Wang, J.-P. Giant magnetoresistive-based biosensing probe station system for multiplex protein assays. Biosens. Bioelectron. 2015, 70, 61–68. [Google Scholar] [CrossRef]
- Klein, T.; Wang, W.; Yu, L.; Wu, K.; Boylan, K.L.M.; Vogel, R.I.; Skubitz, A.P.N.; Wang, J.-P. Development of a multiplexed giant magnetoresistive biosensor array prototype to quantify ovarian cancer biomarkers. Biosens. Bioelectron. 2019, 126, 301–307. [Google Scholar] [CrossRef] [PubMed]
- Gao, Y.; Huo, W.; Zhang, L.; Lian, J.; Tao, W.; Song, C.; Tang, J.; Shi, S.; Gao, Y. Multiplex measurement of twelve tumor markers using a GMR multi-biomarker immunoassay biosensor. Biosens. Bioelectron. 2019, 123, 204–210. [Google Scholar] [CrossRef]
- Wu, K.; Klein, T.; Krishna, V.D.; Su, D.; Perez, A.M.; Wang, J.-P. Portable GMR Handheld Platform for the Detection of Influenza A Virus. ACS Sens. 2017, 2, 1594–1601. [Google Scholar] [CrossRef] [PubMed]
- Choi, J.; Gani, A.W.; Bechstein, D.J.B.; Lee, J.-R.; Utz, P.J.; Wang, S.X. Portable, one-step, and rapid GMR biosensor platform with smartphone interface. Biosens. Bioelectron. 2016, 85, 1–7. [Google Scholar] [CrossRef]
- Zhi, X.; Liu, Q.; Zhang, X.; Zhang, Y.; Feng, J.; Cui, D. Quick genotyping detection of HBV by giant magnetoresistive biochip combined with PCR and line probe assay. Lab Chip 2012, 12, 741–745. [Google Scholar] [CrossRef] [PubMed]
- Sharma, P.P.; Albisetti, E.; Massetti, M.; Scolari, M.; La Torre, C.; Monticelli, M.; Leone, M.; Damin, F.; Gervasoni, G.; Ferrari, G.; et al. Integrated platform for detecting pathogenic DNA via magnetic tunneling junction-based biosensors. Sens. Actuators B 2017, 242, 280–287. [Google Scholar] [CrossRef]
- Li, L.; Mak, K.-Y.; Zhou, Y. Detection of HIV-1 antigen based on magnetic tunnel junction sensors. Chin. Phys. B 2020, 29, 088701. [Google Scholar] [CrossRef]
- Wu, Y.; Liu, Y.; Zhan, Q.; Liu, J.P.; Li, R.-W. Rapid detection of Escherichia coli O157:H7 using tunneling magnetoresistance biosensor. AIP Adv. 2017, 7, 056658. [Google Scholar] [CrossRef]
- Kokkinis, G.; Cardoso, S.F.; Cardoso, F.A.; Giouroudi, I. Microfluidics for the Rapid Detection of Pathogens Using Giant Magnetoresistance Sensors. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Koets, M.; van der Wijk, T.; van Eemeren, J.T.W.M.; van Amerongen, A.; Prins, M.W.J. Rapid DNA multi-analyte immunoassay on a magneto-resistance biosensor. Biosens. Bioelectron. 2009, 24, 1893–1898. [Google Scholar] [CrossRef] [PubMed]
- Mak, A.C.; Osterfeld, S.J.; Yu, H.; Wang, S.X.; Davis, R.W.; Jejelowo, O.A.; Pourmand, N. Sensitive giant magnetoresistive-based immunoassay for multiplex mycotoxin detection. Biosens. Bioelectron. 2010, 25, 1635–1639. [Google Scholar] [CrossRef] [PubMed]
- Ng, E.; Nadeau, K.C.; Wang, S.X. Giant magnetoresistive sensor array for sensitive and specific multiplexed food allergen detection. Biosens. Bioelectron. 2016, 80, 359–365. [Google Scholar] [CrossRef]
- Wang, W.; Wang, Y.; Tu, L.; Klein, T.; Feng, Y.; Li, Q.; Wang, J.-P. Magnetic Detection of Mercuric Ion Using Giant Magnetoresistance-Based Biosensing System. Anal. Chem. 2014, 86, 3712–3716. [Google Scholar] [CrossRef]
- Mu, X.-H.; Liu, H.-F.; Tong, Z.-Y.; Du, B.; Liu, S.; Liu, B.; Liu, Z.-W.; Gao, C.; Wang, J.; Dong, H. A new rapid detection method for ricin based on tunneling magnetoresistance biosensor. Sens. Actuators B 2019, 284, 638–649. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Advantages | Disadvantages | Ref | |
|---|---|---|---|---|
| AMR materials | Anisotropic properties of AMR materials have advantages in position sensing and navigation (angular and displacement sensing) | The low magnitude of AMR outputs (ΔR/R0 < 2.5%) Difficult to reduce the size and hard for miniaturization | [8,9] | |
| Multilayer systems based on GMR and TMR | GMR/TMR multilayer systems exhibit high sensitivity for low magnetic fields GMR/TMR multilayer systems can be integrated with the electronic circuit easily | Multilayer structures require complicated fabrication processes and specific equipment due to the strict limitations of layer thickness (increasing cost on equipment and extending the fabrication process lead to expensive products) GMR/TMR multilayer systems exhibit limited resistance variation range (working range, especially for TMR) and relatively low MR at room temperature (mostly for GMR) | [52,53,54,55,56,57,58,59,60,61,65,66,67] | |
| Granular MR systems | Granular MR systems bring simplified fabrication procedures and reduced investments in instruments Relatively large MR at room temperature can be achieved by some specifical designed granular MR systems | Magnetic field ≥ 50 kOe is the prerequisite to achieve large MR at ambient temperature (relatively small resistance change for low magnetic fields at room temperature) Some granular MR systems require extremely low temperatures for large MR Although granular MR systems can reduce the complexity of the fabrication process, the dependence on specific fabrication techniques (such as magnetron sputtering) remains | [23,24,25,68,69,70,71,72,73,74] | |
| Layered graphene MR systems | Layered graphene MR systems exhibit large MR value and potential to be applied on fabricating next-generation spintronics based on layered graphene | Most layered graphene MR systems require extremely low temperatures to achieve large MR Special designed substrates/circuits are required Precise control of layer number and positions is challenging Special fabrication techniques are required for preparing layered graphene, which further increases the production costs and the complexity | [30,31,32,33,34,35,85,89,90,91] | |
| Graphene foam MR systems | Graphene foam MR systems display relatively large MR at room temperature and offer unique 3-D structures for potential applications | Large magnetic fields (≥50 kOe) are required for graphene foams to reach considerable MR (the magnitude of resistance change shrinks rapidly as the magnetic field reduce to the level of 10 kOe) Graphene foams require complicated fabrication processes (such as CVD) and specific defects-introducing instruments | [41,42,100,101] | |
| Hybrid graphene nanocomposites | Based on CVD/mechanical exfoliation produced graphene | Relatively large values were achieved for both positive and negative MR Future applications in fabricating graphene-based circuits | Special designed substrate/circuits are required for CVD/mechanical exfoliation produced graphene leads to complicated fabrication processes with more investments and time costs Exhibiting small magnitude of MR at room temperature | [43,44,45,46,47] |
| Based on reduced graphene oxide (rGO) | rGO and rGO hybrid nanocomposites can be both obtained with facile preparation processes leads to lesser requirements on special equipment Reduced investments in instruments and simplified production process (cost-effective and friendly for mass production) Large MR was achieved by the rGO hybrid nanocomposites | Current results of rGO hybrid nanocomposites show relatively small MR at the low magnetic field (<10 kOe) and room temperature Few investigations have been performed to develop and improve the MR of rGO hybrid nanocomposites | [29,48,49,50] | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, S.; Zhang, J. Current Progress of Magnetoresistance Sensors. Chemosensors 2021, 9, 211. https://doi.org/10.3390/chemosensors9080211
Yang S, Zhang J. Current Progress of Magnetoresistance Sensors. Chemosensors. 2021; 9(8):211. https://doi.org/10.3390/chemosensors9080211
Chicago/Turabian StyleYang, Songlin, and Jin Zhang. 2021. "Current Progress of Magnetoresistance Sensors" Chemosensors 9, no. 8: 211. https://doi.org/10.3390/chemosensors9080211
APA StyleYang, S., & Zhang, J. (2021). Current Progress of Magnetoresistance Sensors. Chemosensors, 9(8), 211. https://doi.org/10.3390/chemosensors9080211