
Communication Requirements in 5G-Enabled Healthcare Applications: Review and Considerations

 ,
,
Abstract
:1. Introduction
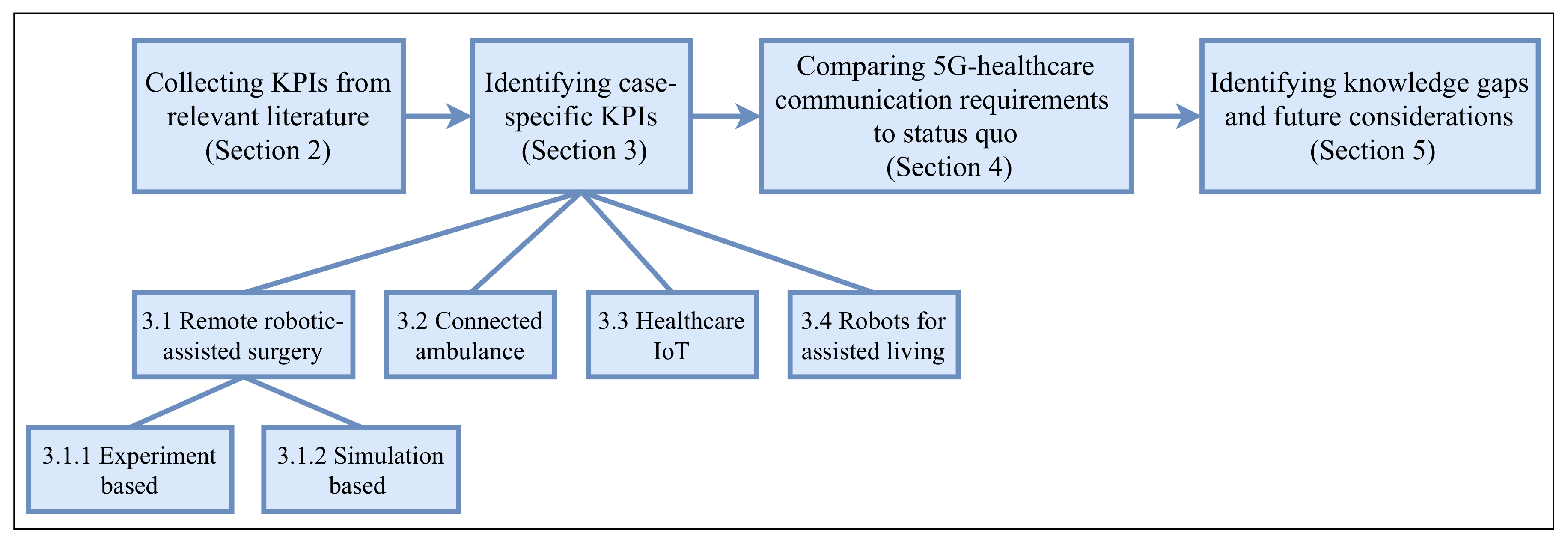
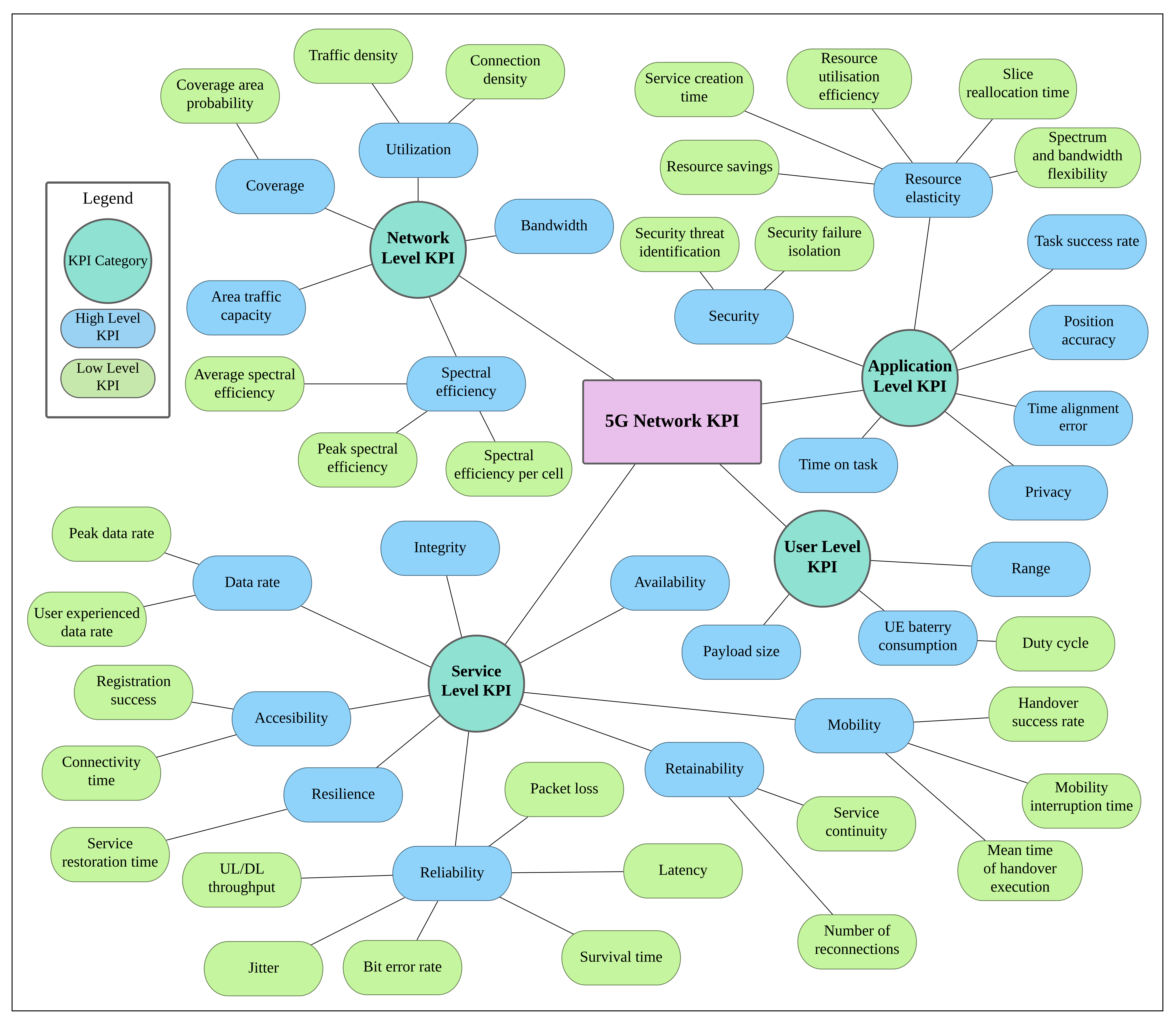
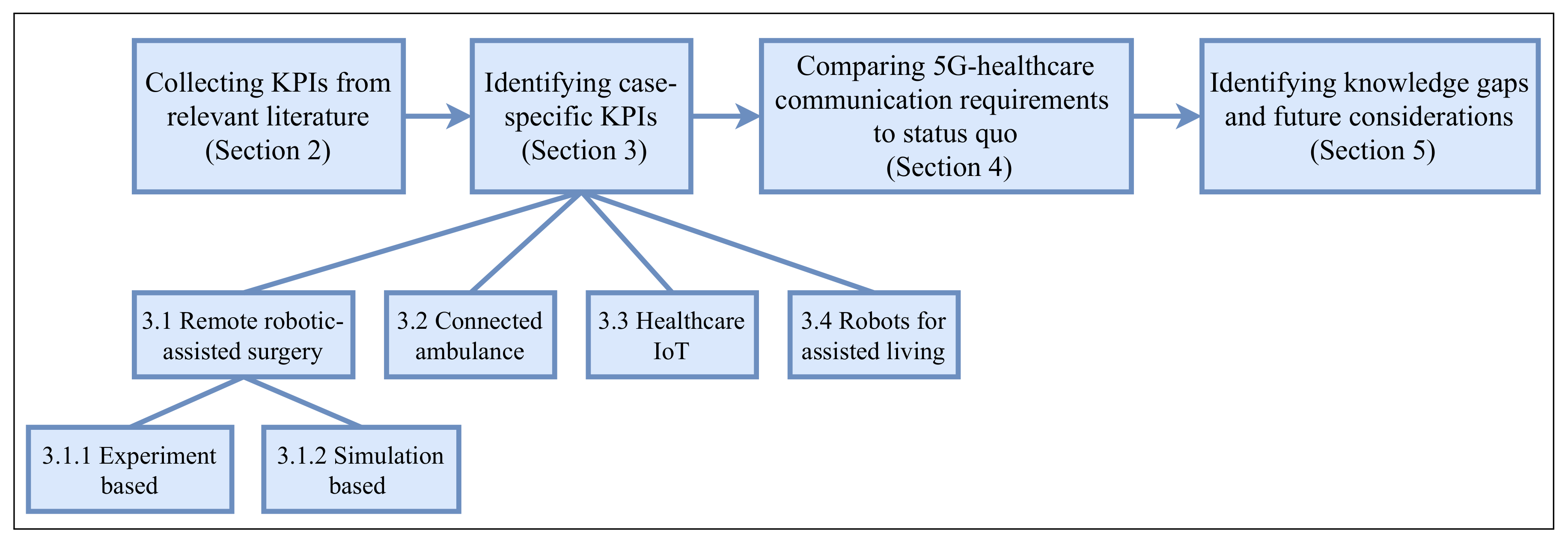
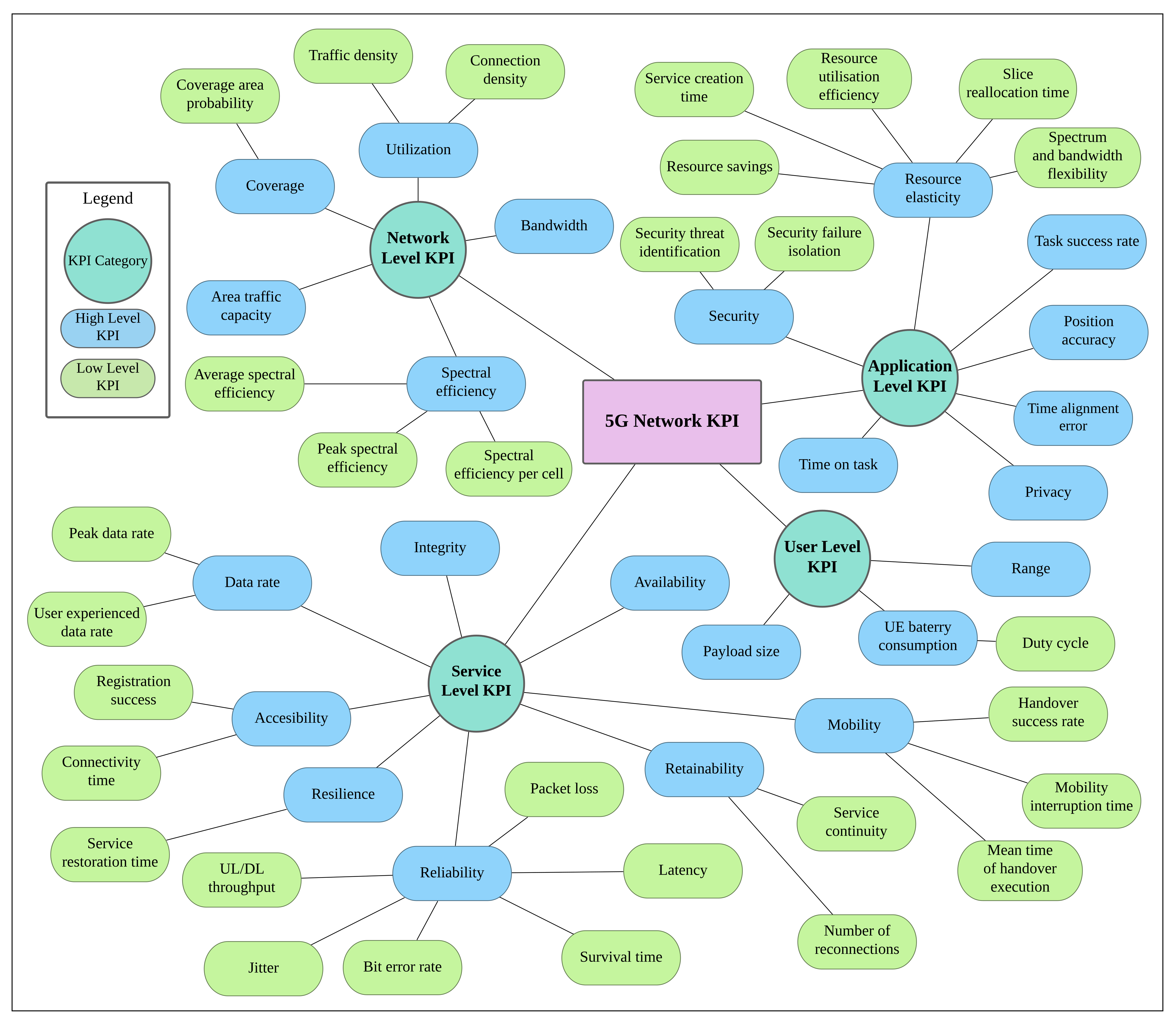
2. Key Performance Indicators for 5G-Healthcare
3. KPIs for Specific 5G-Healthcare Use Cases
3.1. Remote Robotic-Assisted Surgery
3.1.1. Experiment Based
3.1.2. Simulation Based
3.2. Connected Ambulance
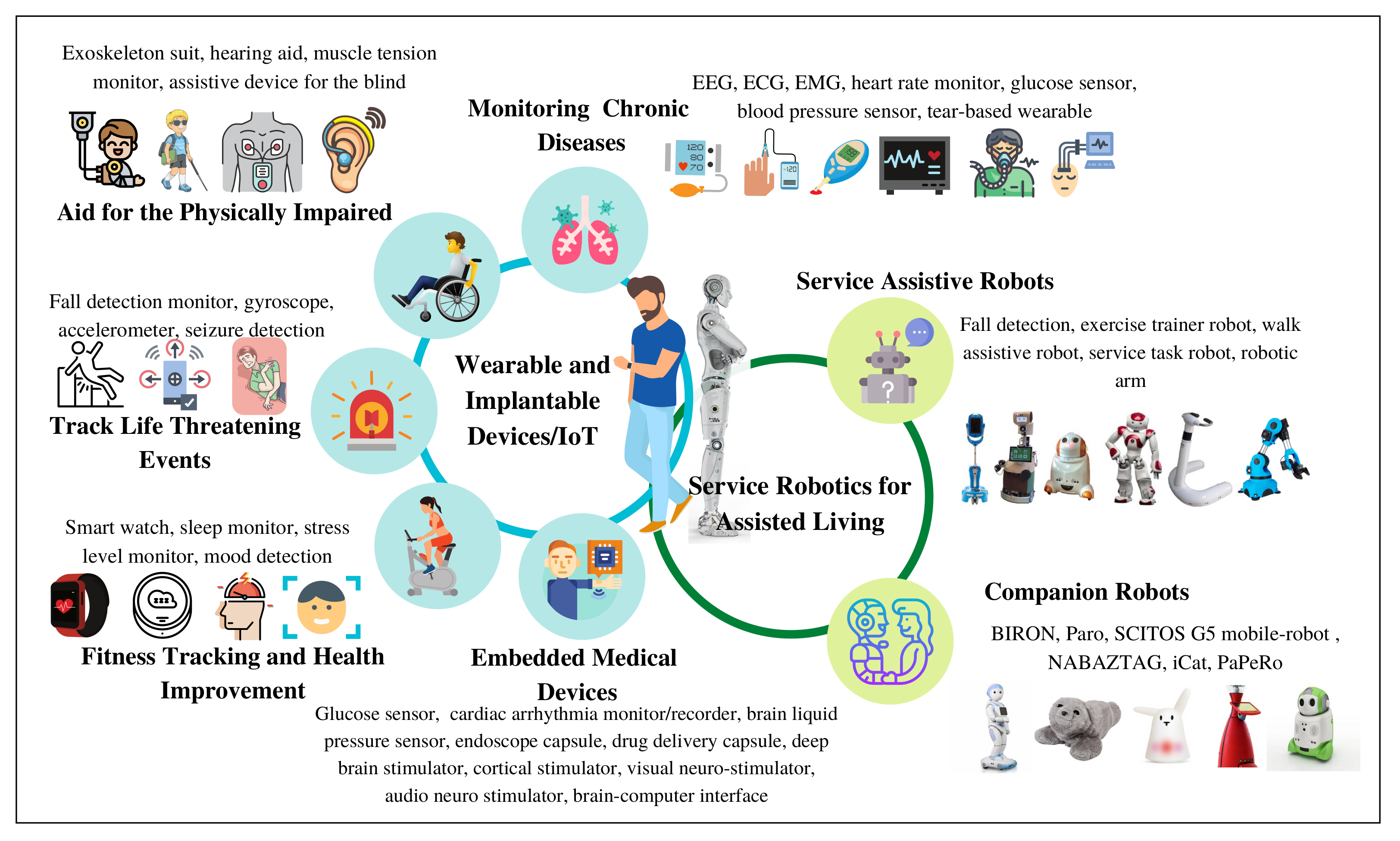
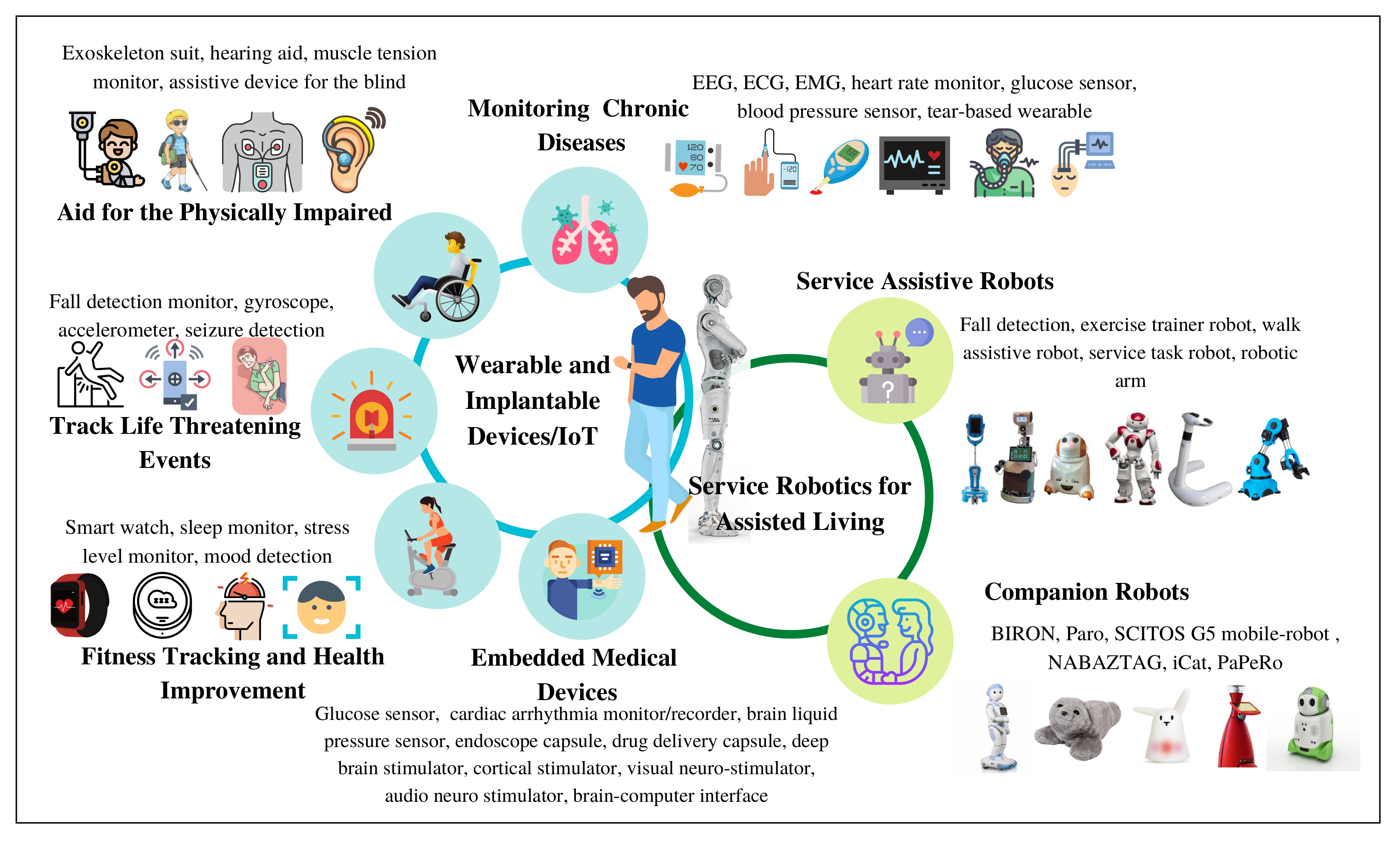
3.3. Healthcare IoT
3.4. Robots for Assisted Living
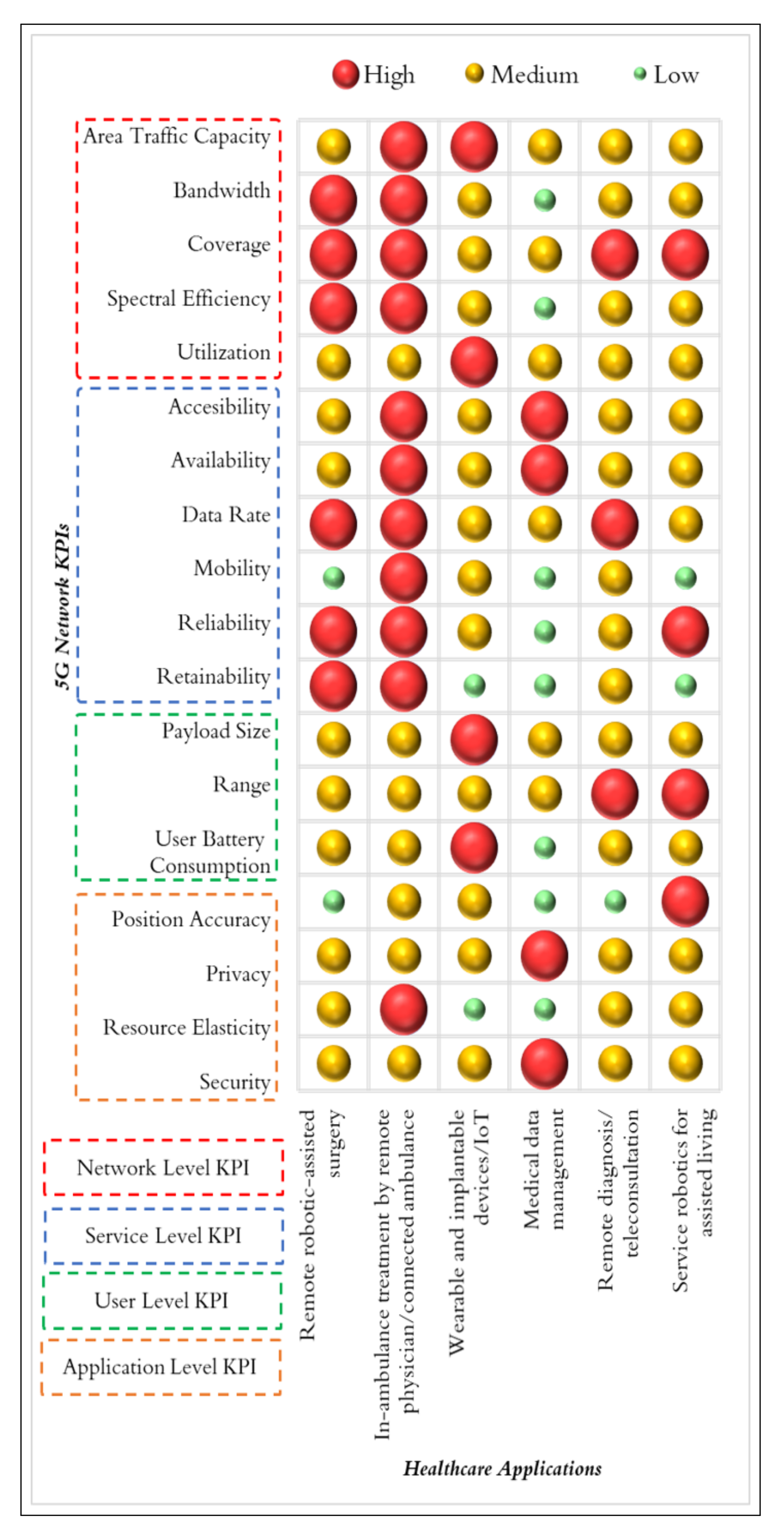
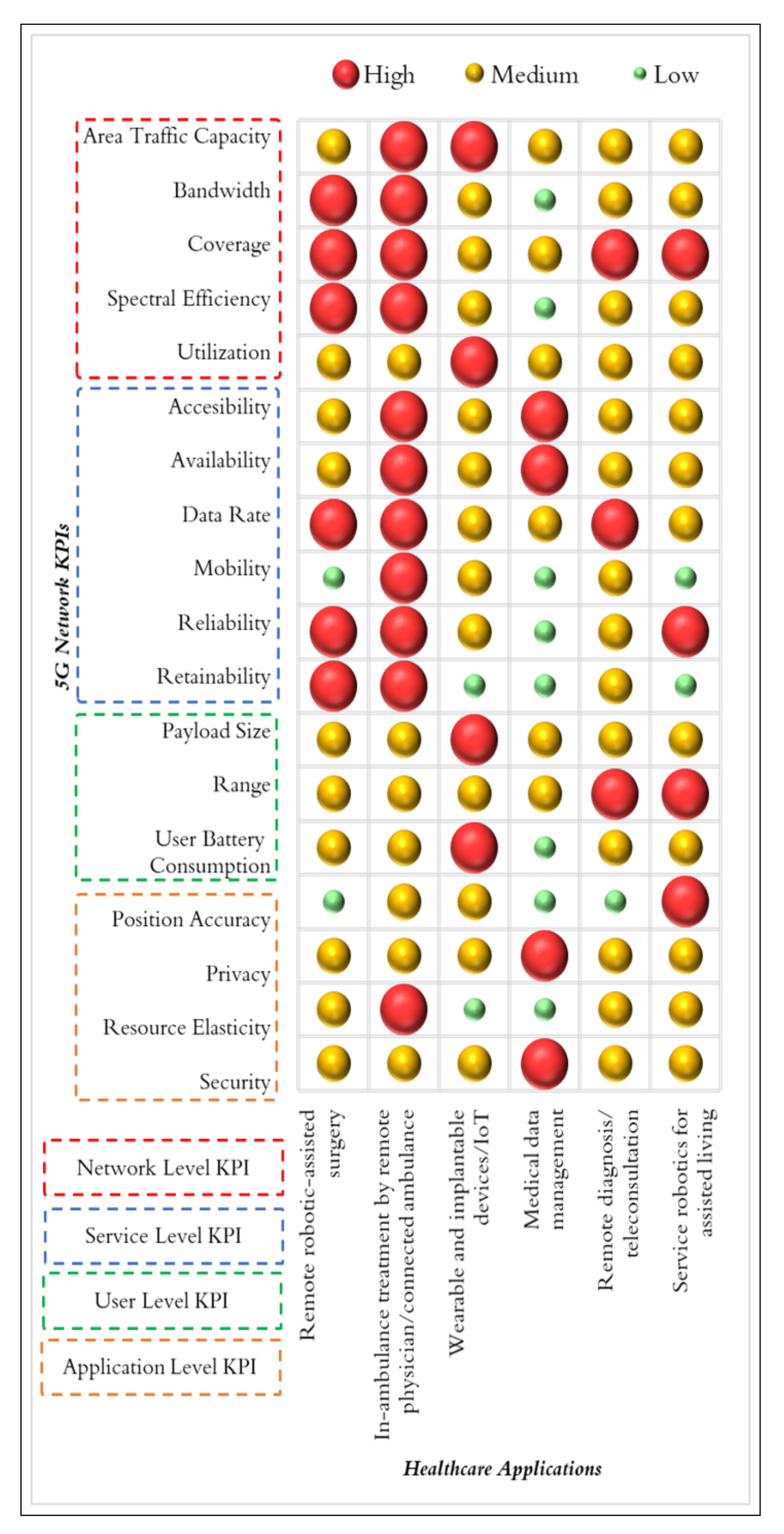
4. 5G-Healthcare Requirements vs. Status of 5G Capabilities
5. Gaps in Literature and Future Considerations
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Telesurgery KPIs

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Type | Reported Latency | Source | Distance |
|---|---|---|---|
| 2D camera flow | <150 ms [20,21] | Experiment [32] | 14,000 km |
| <200 ms [11,22] | Other [22] | ≈1000 m | |
| <700 ms [23] | Experiment [23] | 9000 miles | |
| <600 ms [24] | Experiment [24] | 14,000 km | |
| <300 ms [25] | Experiment [25] | 14,000 km | |
| 3D camera flow | <150 ms [20,21] | Experiment [32] | 14,000 km |
| <300 ms [26] | Experiment [26] | - | |
| <500 ms [27] | Experiment [27] | - | |
| <400 ms [28,29] | Simulation [38] | - | |
| 280 ms [195] | Experiment [195] | 15 km | |
| 20–50 ms [30] | Other [30] | 200 km | |
| 2–60 ms [46] | Experiment [196] | - | |
| 146–202 ms [197] | Experiment [197] | 4 km, 6.1 km | |
| 28 ms [191] | Experiment [191] | ≈740 km, 1260 km, 144 km, 190 km, 3160 km | |
| 258–278 ms [198] | Experiment [198] | 3000 km | |
| Audio flow | 0.25–5 ms [48] | Simulation [48] | - |
| <150 ms [20,21,28,31] | Experiment [32] | 14,000 km | |
| 100 ms [30] | Other [30] | 200 km | |
| Temperature | <250 ms [11,20,21,33,34] | Other [33] | - |
| Blood pressure | <250 ms [11,20,21,33,34] | Other [33] | - |
| Heart rate | <250 ms [11,20,21,33,34] | Other [33] | - |
| Respiration rate | <250 ms [11,20,21,33,34] | Other [33] | - |
| ECG | <250 ms [11,20,21,33,34] | Other [33] | - |
| EEG | <250 ms [11,20,21,33,34] | Other [33] | - |
| EMG | <250 ms [11,20,21,33,34] | Other [33] | - |
| Force | 3–10 ms [20,21] | Experiment [37] | - |
| 1–10 ms [30] | Other [30] | 200 km | |
| 3–60 ms [28] | Experiment [39] | ≈3200 miles | |
| <50 ms [29,35] | Experiment [40] & Simulation [35] | few hundred meters | |
| 40 ms [29] | Experiment & Simulation [29] | - | |
| <100 ms [36] | Experiment [36] | - | |
| Vibration | <5.5 ms [20,21,28,31] | Experiment [37] | - |
| <50 ms [29] | Experiment [40] | few hundred meters | |
| 1–10 ms [30] | Other [30] | 200 km |
| Data Type | Reported Jitter | Source |
|---|---|---|
| 2D camera flow | 3–30 ms [11,20] | Simulation [41] Simulation[38] |
| 3D camera flow | 3–30 ms [11,20] | Simulation [41] Simulation [38] |
| 3–55 ms [48] | Simulation [48] | |
| <30 ms [28,29,30,34,38,41] | Other [30] | |
| Audio flow | <30 ms [11,20,28,29,34] | Simulation [41] Simulation [38] |
| 50 ms [30] | Other [30] | |
| 3–55 ms [48] | Simulation [48] | |
| Force | <2 ms [11,20,29,34] | Experiment [40] Simulation [41] |
| 10 ms [30] | Other [30] | |
| 1–10 ms [28] | Experiment [42] | |
| Vibration | <2 ms [11,20,29,34] | Experiment [40] Simulation [41] |
| 10 ms [30] | Other [30] | |
| 1–10 ms [28] | Experiment [42] |
| Data Type | Reported Data Rate | Source |
|---|---|---|
| 2D camera flow | <10 Mbps [20,21] | Simulation [41] Experiment [40] |
| 3D camera flow | 137 Mbps–1.6 Gbps [20,21] | Simulation [28] |
| ≈8 Mbps [196] | Experiment [196] | |
| 95–106 Mbps [197] | Experiment [197] | |
| 2.5–5 Mbps [28,29] | Simulation [41] Experiment [40] | |
| 1 Gbps [30] | Other [30] | |
| >1 Gbps [11] | Simulation [28] | |
| Audio flow | 22–200 Kbps [20,21,28,29] | Experiment [31] |
| Temperature | <10 Kbps [20,21,34] | Other [33] |
| Blood pressure | <10 Kbps [20,21,34] | Other [33] |
| Heart rate | <10 Kbps [20,21,34] | Other [33] |
| Respiration rate | <10 Kbps [20,21,34] | Other [33] |
| ECG | 72 Kbps [20,21,34] | Other [33] |
| EEG | 84.6 Kbps [20,21,34] | Other [33] |
| EMG | 1.536 Mbps [20,21,34] | Other [33] |
| Force | 128–400 Kbps [20,21] | Experiment [28,31] |
| 500 Kbps–1 Mbps [29] | Simulation [41] | |
| 128 Kbps [28] | Experiment [43] | |
| Vibration | 128–400 Kbps [20] | Experiment [28,31] |
| 500 Kbps–1 Mbps [29] | Simulation [41] | |
| 128 Kbps [28] | Experiment [43] |
| Data Type | Reported Loss | Source |
|---|---|---|
| 2D camera flow | < [20,21] | Experiment [40,41] |
| 3D camera flow | < [20,21] | Experiments [40,41] |
| <1% [28,29] | Experiments [40,41] & Simulation [38] | |
| 0.01–0.06% [48] | Simulations [48] | |
| Audio flow | < [20,21] | Experiments [40,41] |
| 0.01–0.06% [48] | Simulations [48] | |
| <1% [28,29] | Experiments [40,41], Simulation [38] | |
| [30] | Other [30] | |
| Temperature | < [20,21] | Other [33] |
| < [34] (BER) | Other [33] | |
| Blood pressure | < [20,21] | Other [33] |
| < [34] (BER) | Other [33] | |
| Heart rate | < [20,21] | Other [33] |
| < [34] (BER) | Other [33] | |
| Respiration rate | < [20,21] | Other [33] |
| < [34] (BER) | Other [33] | |
| ECG | < [20,21] | Other [33] |
| < [34] (BER) | Other [33] | |
| EEG | < [20,21] | Other [33] |
| < [34] (BER) | Other [33] | |
| EMG | < [20,21] | Other [33] |
| < [34] (BER) | Other [33] | |
| Force | <10% [29] | Experiments [40,41] |
| < [20] [21] | Experiments [40,41] | |
| 0.01-10% [28] | Experiments [40,41] | |
| <0.1 [35] | Experiments [35] | |
| Vibration | <10% [29] | Experiments [40,41,43] |
| < [20] [21] | Experiments [40,41,43] | |
| 0.01–10% [28] | Experiments [40,41,43] |
| KPI | Reported Requirement | Source |
|---|---|---|
| Reliability | [11,44] | |
| Availability | [11] | |
| Payload size | Big | [11] |
| Traffic density | Low [] | [11] |
| Connection density | Low [/km] | [11] |
| Service area dimension | 10 m × 10 m × 5 m | [11] |
| Survival time | 0 ms | [11] |
| Range | Up to 200 km | [30] |
| 300 km | [11] | |
| Duty cycle for vital signal monitoring | <1–10% | [34] |
References
- Li, D. 5G and intelligence medicine—How the next generation of wireless technology will reconstruct healthcare? Precis. Clin. Med. 2019, 2, 205–208. [Google Scholar] [CrossRef] [Green Version]
- Liu, E.; Effiok, E.; Hitchcock, J. Survey on health care applications in 5G networks. IET Commun. 2020, 14, 1073–1080. [Google Scholar] [CrossRef]
- Hamm, S.; Schleser, A.C.; Hartig, J.; Thomas, P.; Zoesch, S.; Bulitta, C. 5G as enabler for Digital Healthcare. Curr. Dir. Biomed. Eng. 2020, 6, 1–4. [Google Scholar] [CrossRef]
- Padmashree, T.; Nayak, S.S. 5G Technology for E-Health. In Proceedings of the 2020 Fourth International Conference on I-SMAC (IoT in Social, Mobile, Analytics and Cloud)(I-SMAC), Palladam, India, 7–9 October 2020; pp. 211–216. [Google Scholar]
- Gupta, P.; Ghosh, M. Revolutionizing Healthcare with 5G. Telecom Bus. Rev. 2019, 12, 41. [Google Scholar]
- Qureshi, H.N.; Manalastas, M.; Zaidi, S.M.A.; Imran, A.; Al Kalaa, M.O. Service Level Agreements for 5G and beyond: Overview, Challenges and Enablers of 5G-Healthcare Systems. IEEE Access 2020, 9, 1044–1061. [Google Scholar] [CrossRef]
- Ullah, H.; Nair, N.G.; Moore, A.; Nugent, C.; Muschamp, P.; Cuevas, M. 5G communication: An overview of vehicle-to-everything, drones, and healthcare use-cases. IEEE Access 2019, 7, 37251–37268. [Google Scholar] [CrossRef]
- Muzammil, S. Telehealth: Is It Only for the Rural Areas? A Review of Its Wider Use. Telehealth Med. Today 2020, 5, 30938–30953. [Google Scholar] [CrossRef]
- Qadri, Y.A.; Nauman, A.; Zikria, Y.B.; Vasilakos, A.V.; Kim, S.W. The future of healthcare internet of things: A survey of emerging technologies. IEEE Commun. Surv. Tutor. 2020, 22, 1121–1167. [Google Scholar] [CrossRef]
- FDA. Radio Frequency Wireless Technology in Medical Devices, Guidance for Industry and Food and Drug Administration Staff. Available online: https://www.fda.gov/media/71975/download (accessed on 29 October 2020).
- Cisotto, G.; Casarin, E.; Tomasin, S. Requirements and Enablers of Advanced Healthcare Services over Future Cellular Systems. IEEE Commun. Mag. 2020, 58, 76–81. [Google Scholar] [CrossRef]
- Schaich, F.; Hamon, M.H.; Hunukumbure, M.; Lorca, J.; Pedersen, K.; Schubert, M.; Kosmatos, E.; Wunder, G.; Reaz, K. The ONE5G Approach Towards the Challenges of Multi-Service Operation in 5G Systems. In Proceedings of the 2018 IEEE 87th Vehicular Technology Conference (VTC Spring), Porto, Portugal, 3–6 June 2018; pp. 1–6. [Google Scholar] [CrossRef]
- 5GPPP. White Paper on Service Performance Measurement Methods over 5G Experimental Networks from TMV WG. Available online: https://5g-ppp.eu/white-paper-on-service-performance-measurement-methods-over-5g-experimental-networks/ (accessed on 30 June 2021).
- 5G-Monarch. Documentation of Requirements and KPIs and Definition of Suitable Evaluation Criteria. Available online: https://5g-monarch.eu/wp-content/uploads/2017/10/5G-MoNArch_761445_D6.1_Documentation_of_Requirements_and_KPIs_and_Definition_of_Suitable_Evaluation_Criteria_v1.0.pdf (accessed on 30 June 2021).
- Krasniqi, F.; Gavrilovska, L.; Maraj, A. The Analysis of Key Performance Indicators (KPI) in 4G/LTE Networks. In Future Access Enablers for Ubiquitous and Intelligent Infrastructures; Poulkov, V., Ed.; Springer International Publishing: Cham, Switzerland, 2019; pp. 285–296. [Google Scholar]
- 3GPP. 3GPP TR 38.913, “Study on Scenarios and Requirements for Next Generation Access Technologies”. V14.2.0. March 2017. Available online: http://www.3gpp.org (accessed on 30 June 2021).
- Dwivedi, S.; Shreevastav, R.; Munier, F.; Nygren, J.; Siomina, I.; Lyazidi, Y.; Shrestha, D.; Lindmark, G.; Ernström, P.; Stare, E.; et al. Positioning in 5G networks. arXiv 2021, arXiv:2102.03361. [Google Scholar] [CrossRef]
- Gutierrez-Estevez, D.M.; Gramaglia, M.; De Domenico, A.; Di Pietro, N.; Khatibi, S.; Shah, K.; Tsolkas, D.; Arnold, P.; Serrano, P. The path towards resource elasticity for 5G network architecture. In Proceedings of the 2018 IEEE Wireless Communications and Networking Conference Workshops (WCNCW), Barcelona, Spain, 15–18 April 2018; pp. 214–219. [Google Scholar]
- Global Connected Wearable Devices. Available online: https://www.statista.com/statistics/487291/global-connected-wearable-devices/ (accessed on 27 June 2021).
- Zhang, Q.; Liu, J.; Zhao, G. Towards 5G enabled tactile robotic telesurgery. arXiv 2018, arXiv:1803.03586. [Google Scholar]
- Usman, M.A.; Philip, N.Y.; Politis, C. 5G enabled mobile healthcare for ambulances. In Proceedings of the 2019 IEEE Globecom Workshops (GC Wkshps), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]
- Thuemmler, C.; Gavrasm, A.; Jumelle, A.; Paulin, A.; Sadique, A.; Schneider, A.; Fedell, C.; Abraham, D.; Trossen, D. 5G and e-Health; 5G-PPP White Paper. 2015, pp. 1–24. Available online: https://5g-ppp.eu/euro-5g/ (accessed on 20 July 2021).
- Fabrlzio, M.D.; Lee, B.R.; Chan, D.Y.; Stoianovici, D.; Jarrett, T.W.; Yang, C.; Kavoussi, L.R. Effect of time delay on surgical performance during telesurgical manipulation. J. Endourol. 2000, 14, 133–138. [Google Scholar] [CrossRef] [PubMed]
- Rayman, R.; Primak, S.; Patel, R.; Moallem, M.; Morady, R.; Tavakoli, M.; Subotic, V.; Galbraith, N.; Van Wynsberghe, A.; Croome, K. Effects of latency on telesurgery: An experimental study. In Lecture Notes in Computer Science, Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Palm Springs, CA, USA, 26–29 October 2005; Springer: Berlin/Heidelberg, Germany, 2005; pp. 57–64. [Google Scholar]
- Marescaux, J.; Leroy, J.; Rubino, F.; Smith, M.; Vix, M.; Simone, M.; Mutter, D. Transcontinental robot-assisted remote telesurgery: Feasibility and potential applications. Ann. Surg. 2002, 235, 487. [Google Scholar] [CrossRef] [PubMed]
- Xu, S.; Perez, M.; Yang, K.; Perrenot, C.; Felblinger, J.; Hubert, J. Determination of the latency effects on surgical performance and the acceptable latency levels in telesurgery using the dV-Trainer® simulator. Surg. Endosc. 2014, 28, 2569–2576. [Google Scholar] [CrossRef] [PubMed]
- Perez, M.; Xu, S.; Chauhan, S.; Tanaka, A.; Simpson, K.; Abdul-Muhsin, H.; Smith, R. Impact of delay on telesurgical performance: Study on the robotic simulator dV-Trainer. Int. J. Comput. Assist. Radiol. Surg. 2016, 11, 581–587. [Google Scholar] [CrossRef]
- Eid, M.; Cha, J.; El Saddik, A. Admux: An adaptive multiplexer for haptic-audio-visual data communication. IEEE Trans. Instrum. Meas. 2010, 60, 21–31. [Google Scholar] [CrossRef]
- Marshall, A.; Yap, K.M.; Yu, W. Providing QoS for networked peers in distributed haptic virtual environments. Adv. Multimed. 2008, 2008, 841590. [Google Scholar] [CrossRef] [Green Version]
- NSF. NSF Follow-on Workshop on Ultra-Low Latency Wireless Networks. In NSF Workshop on Ultra Low-Latency Wireless Networks; NSF: Arlington, VA, USA, 2016. [Google Scholar]
- Cizmeci, B.; Xu, X.; Chaudhari, R.; Bachhuber, C.; Alt, N.; Steinbach, E. A multiplexing scheme for multimodal teleoperation. ACM Trans. Multimed. Comput. Commun. Appl. (TOMM) 2017, 13, 1–28. [Google Scholar] [CrossRef]
- Marescaux, J.; Leroy, J.; Gagner, M.; Rubino, F.; Mutter, D.; Vix, M.; Butner, S.E.; Smith, M.K. Transatlantic robot-assisted telesurgery. Nature 2001, 413, 379–380. [Google Scholar] [CrossRef]
- Zhen, B.; Patel, M.; Lee, S.; Won, E.; Astrin, A. TG6 technical requirements document (TRD). IEEE P802 2008, 15, 8. [Google Scholar]
- Patel, M.; Wang, J. Applications, challenges, and prospective in emerging body area networking technologies. IEEE Wirel. Commun. 2010, 17, 80–88. [Google Scholar] [CrossRef]
- Shi, Z.; Zou, H.; Rank, M.; Chen, L.; Hirche, S.; Muller, H.J. Effects of packet loss and latency on the temporal discrimination of visual-haptic events. IEEE Trans. Haptics 2009, 3, 28–36. [Google Scholar]
- Makino, Y.; Furuyama, Y.; Inoue, S.; Shinoda, H. HaptoClone (Haptic-Optical Clone) for Mutual Tele-Environment by Real-time 3D Image Transfer with Midair Force Feedback. In Proceedings of the CHI, San Jose, China, 7 May 2016; pp. 1980–1990. [Google Scholar]
- Hachisu, T.; Kajimoto, H. Vibration feedback latency affects material perception during rod tapping interactions. IEEE Trans. Haptics 2016, 10, 288–295. [Google Scholar] [CrossRef]
- Bertsekas, D.P. Traffic Behavior and Queuing in a QoS Environment. OPNETWORK 2005, Session 1813. 2005. Available online: https://www.cpe.ku.ac.th/~anan/myhomepage/wp-content/uploads/2015/01/1-opnet_full_presentation.pdf (accessed on 20 October 2021).
- Kim, J.; Kim, H.; Tay, B.K.; Muniyandi, M.; Srinivasan, M.A.; Jordan, J.; Mortensen, J.; Oliveira, M.; Slater, M. Transatlantic touch: A study of haptic collaboration over long distance. Presence Teleoperators Virtual Environ. 2004, 13, 328–337. [Google Scholar] [CrossRef] [Green Version]
- Souayed, R.T.; Gaiti, D.; Yu, W.; Dodds, G.; Marshall, A. Experimental study of haptic interaction in distributed virtual environments. In Proceedings of the EuroHaptics, Munich, Germany, 5–7 June 2004; pp. 260–266. [Google Scholar]
- Yap, K.M.; Marshall, A.; Yu, W.; Dodds, G.; Gu, Q.; Souayed, R.T. Characterising distributed haptic virtual environment network traffic flows. In IFIP—The International Federation for Information Processing, Proceedings of the International Conference on Network Control and Engineering for QoS, Security and Mobility, Lannion, France, 14–18 November 2005; Springer: Boston, MA, USA, 2005; pp. 297–310. [Google Scholar]
- Park, K.S.; Kenyon, R.V. Effects of network characteristics on human performance in a collaborative virtual environment. In Proceedings of the IEEE Virtual Reality (Cat. No. 99CB36316), Houston, TX, USA, 13–17 March 1999; pp. 104–111. [Google Scholar]
- Dev, P.; Harris, D.; Gutierrez, D.; Shah, A.; Senger, S. End-to-end performance measurement of Internet based medical applications. In Proceedings of the AMIA Symposium, San Antonio, AZ, USA, 9–13 November 2002; American Medical Informatics Association: San Antonio, AZ, USA, 2002; pp. 205–209. [Google Scholar]
- Soldani, D.; Fadini, F.; Rasanen, H.; Duran, J.; Niemela, T.; Chandramouli, D.; Hoglund, T.; Doppler, K.; Himanen, T.; Laiho, J.; et al. 5G mobile systems for healthcare. In Proceedings of the 2017 IEEE 85th Vehicular Technology Conference (VTC Spring), Sydney, NSW, Australia, 4–7 June 2017; pp. 1–5. [Google Scholar]
- Xia, S.B.; Lu, Q.S. Development status of telesurgery robotic system. Chin. J. Traumatol. 2021, 24, 144–147. [Google Scholar] [CrossRef] [PubMed]
- Valdez, L.B.; Datta, R.R.; Babic, B.; Müller, D.T.; Bruns, C.J.; Fuchs, H.F. 5G mobile communication applications for surgery: An overview of the latest literature. Artif. Intell. Gastrointest. Endosc. 2021, 2, 1–11. [Google Scholar] [CrossRef]
- Dohler, M. The Internet of Skills: How 5G-Synchronized Reality Is Transforming Robotic Surgery. In Robotic Surgery; Springer: Berlin/Heidelberg, Germany, 2021; pp. 207–215. [Google Scholar] [CrossRef]
- Sedaghat, S.; Jahangir, A.H. RT-TelSurg: Real Time Telesurgery Using SDN, Fog, and Cloud as Infrastructures. IEEE Access 2021, 9, 52238–52251. [Google Scholar]
- Ahvar, E.; Ahvar, S.; Raza, S.M.; Manuel Sanchez Vilchez, J.; Lee, G.M. Next generation of SDN in cloud-fog for 5G and beyond-enabled applications: Opportunities and challenges. Network 2021, 1, 28–49. [Google Scholar] [CrossRef]
- Aggarwal, S.; Kumar, N. Fog computing for 5G-enabled tactile Internet: Research issues, challenges, and future research directions. Mob. Netw. Appl. 2019, 1–28. [Google Scholar] [CrossRef]
- Hartmann, M.; Hashmi, U.S.; Imran, A. Edge computing in smart health care systems: Review, challenges, and research directions. Trans. Emerg. Telecommun. Technol. 2019, e3710. [Google Scholar] [CrossRef]
- Akrivopoulos, O.; Chatzigiannakis, I.; Tselios, C.; Antoniou, A. On the deployment of healthcare applications over fog computing infrastructure. In Proceedings of the 2017 IEEE 41st Annual Computer Software and Applications Conference (COMPSAC), Turin, Italy, 4–8 July 2017; Volume 2, pp. 288–293. [Google Scholar]
- Mutlag, A.A.; Abd Ghani, M.K.; Arunkumar, N.A.; Mohammed, M.A.; Mohd, O. Enabling technologies for fog computing in healthcare IoT systems. Future Gener. Comput. Syst. 2019, 90, 62–78. [Google Scholar] [CrossRef]
- LaMonte, M.P.; Cullen, J.; Gagliano, D.M.; Gunawardane, R.; Hu, P.; Mackenzie, C.; Xiao, Y. TeleBAT: Mobile telemedicine for the Brain Attack Team. J. Stroke Cerebrovasc. Dis. 2000, 9, 128–135. [Google Scholar] [CrossRef] [PubMed]
- Terkelsen, C.; Nørgaard, B.; Lassen, J.; Gerdes, J.; Ankersen, J.; Rømer, F.; Nielsen, T.; Andersen, H. Telemedicine used for remote prehospital diagnosing in patients suspected of acute myocardial infarction. J. Intern. Med. 2002, 252, 412–420. [Google Scholar] [CrossRef]
- Hsieh, J.C.; Lin, B.X.; Wu, F.R.; Chang, P.C.; Tsuei, Y.W.; Yang, C.C. Ambulance 12-lead electrocardiography transmission via cell phone technology to cardiologists. Telemed. E-Health 2010, 16, 910–915. [Google Scholar] [CrossRef] [PubMed]
- Liman, T.G.; Winter, B.; Waldschmidt, C.; Zerbe, N.; Hufnagl, P.; Audebert, H.J.; Endres, M. Telestroke ambulances in prehospital stroke management: Concept and pilot feasibility study. Stroke 2012, 43, 2086–2090. [Google Scholar] [CrossRef] [Green Version]
- Yperzeele, L.; Van Hooff, R.J.; De Smedt, A.; Espinoza, A.V.; Van Dyck, R.; Van de Casseye, R.; Convents, A.; Hubloue, I.; Lauwaert, D.; De Keyser, J.; et al. Feasibility of AmbulanCe-Based Telemedicine (FACT) study: Safety, feasibility and reliability of third generation in-ambulance telemedicine. PLoS ONE 2014, 9, e110043. [Google Scholar] [CrossRef] [PubMed]
- Wu, T.C.; Nguyen, C.; Ankrom, C.; Yang, J.; Persse, D.; Vahidy, F.; Grotta, J.C.; Savitz, S.I. Prehospital utility of rapid stroke evaluation using in-ambulance telemedicine: A pilot feasibility study. Stroke 2014, 45, 2342–2347. [Google Scholar] [CrossRef] [Green Version]
- Espinoza, A.V.; Van Hooff, R.J.; De Smedt, A.; Moens, M.; Yperzeele, L.; Nieboer, K.; Hubloue, I.; de Keyser, J.; Convents, A.; Tellez, H.F.; et al. Development and pilot testing of 24/7 in-ambulance telemedicine for acute stroke: Prehospital stroke study at the Universitair Ziekenhuis Brussel-Project. Cerebrovasc. Dis. 2016, 42, 15–22. [Google Scholar] [CrossRef] [Green Version]
- Itrat, A.; Taqui, A.; Cerejo, R.; Briggs, F.; Cho, S.M.; Organek, N.; Reimer, A.P.; Winners, S.; Rasmussen, P.; Hussain, M.S.; et al. Telemedicine in prehospital stroke evaluation and thrombolysis: Taking stroke treatment to the doorstep. JAMA Neurol. 2016, 73, 162–168. [Google Scholar] [CrossRef]
- Antoniou, Z.C.; Panayides, A.S.; Pantzaris, M.; Constantinides, A.G.; Pattichis, C.S.; Pattichis, M.S. Real-time adaptation to time-varying constraints for medical video communications. IEEE J. Biomed. Health Inform. 2017, 22, 1177–1188. [Google Scholar] [CrossRef]
- Rehman, I.U.; Nasralla, M.M.; Ali, A.; Philip, N. Small cell-based ambulance scenario for medical video streaming: A 5G-health use case. In Proceedings of the 2018 15th International Conference on Smart Cities: Improving Quality of Life Using ICT & IoT (HONET-ICT), Islamabad, Pakistan, 8–10 October 2018; pp. 29–32. [Google Scholar]
- Wang, Q.; Alcaraz-Calero, J.; Ricart-Sanchez, R.; Weiss, M.B.; Gavras, A.; Nikaein, N.; Vasilakos, X.; Giacomo, B.; Pietro, G.; Roddy, M.; et al. Enable advanced QoS-aware network slicing in 5G networks for slice-based media use cases. IEEE Trans. Broadcast. 2019, 65, 444–453. [Google Scholar] [CrossRef] [Green Version]
- Roddy, M.; Truong, T.; Walsh, P.; Al Bado, M.; Wu, Y.; Healy, M.; Ahearne, S. 5G Network Slicing for Mission-critical use cases. In Proceedings of the 2019 IEEE 2nd 5G World Forum (5GWF), Dresden, Germany, 30 September–2 October 2019; pp. 409–414. [Google Scholar]
- Kamal, M.D.; Tahir, A.; Kamal, M.B.; Naeem, M.A. Future Location Prediction for Emergency Vehicles Using Big Data: A Case Study of Healthcare Engineering. J. Healthc. Eng. 2020, 2020, 6641571. [Google Scholar] [CrossRef] [PubMed]
- Yu, S.; Yi, F.; Qiulin, X.; Liya, S. A Framework of 5G Mobile-health Services for Ambulances. In Proceedings of the 2020 IEEE 20th International Conference on Communication Technology (ICCT), Nanning, China, 28–31 October 2020; pp. 528–532. [Google Scholar]
- Bin-Yahya, M.A.R. E-AMBULANCE: A Real-Time Integration Platform for Heterogeneous Medical Telemetry System of Smart Ambulances. Ph.D. Thesis, King Fahd University of Petroleum and Minerals, Dhahran, Saudi Arabia, 2015. [Google Scholar]
- Ehrler, F.; Siebert, J.N. PedAMINES: A disruptive mHealth app to tackle paediatric medication errors. Swiss Med. Wkly. 2020, 150, w20335. [Google Scholar] [CrossRef]
- Almadani, B.; Bin-Yahya, M.; Shakshuki, E.M. E-AMBULANCE: Real-time integration platform for heterogeneous medical telemetry system. Procedia Comput. Sci. 2015, 63, 400–407. [Google Scholar] [CrossRef] [Green Version]
- Lippman, J.M.; Smith, S.N.C.; McMurry, T.L.; Sutton, Z.G.; Gunnell, B.S.; Cote, J.; Perina, D.G.; Cattell-Gordon, D.C.; Rheuban, K.S.; Solenski, N.J.; et al. Mobile telestroke during ambulance transport is feasible in a rural EMS setting: The iTREAT Study. Telemed. e-Health 2016, 22, 507–513. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, H.; Kim, S.W.; Park, E.; Kim, J.H.; Chang, H. The role of fifth-generation mobile technology in prehospital emergency care: An opportunity to support paramedics. Health Policy Technol. 2020, 9, 109–114. [Google Scholar] [CrossRef]
- Zhai, Y.; Xu, X.; Chen, B.; Lu, H.; Wang, Y.; Li, S.; Shi, X.; Wang, W.; Shang, L.; Zhao, J. 5G-Network-Enabled Smart Ambulance: Architecture, Application, and Evaluation. IEEE Netw. 2021, 35, 190–196. [Google Scholar] [CrossRef]
- Geisler, F.; Kunz, A.; Winter, B.; Rozanski, M.; Waldschmidt, C.; Weber, J.E.; Wendt, M.; Zieschang, K.; Ebinger, M.; Audebert, H.J.; et al. Telemedicine in prehospital acute stroke care. J. Am. Heart Assoc. 2019, 8, e011729. [Google Scholar] [CrossRef] [Green Version]
- Kandimalla, J.; Vellipuram, A.R.; Rodriguez, G.; Maud, A.; Cruz-Flores, S.; Khatri, R. Role of Telemedicine in Prehospital Stroke Care. Curr. Cardiol. Rep. 2021, 23, 1–5. [Google Scholar] [CrossRef]
- Rajan, S.S.; Baraniuk, S.; Parker, S.; Wu, T.C.; Bowry, R.; Grotta, J.C. Implementing a mobile stroke unit program in the United States: Why, how, and how much? JAMA Neurol. 2015, 72, 229–234. [Google Scholar]
- Wu, T.C.; Parker, S.A.; Jagolino, A.; Yamal, J.M.; Bowry, R.; Thomas, A.; Yu, A.; Grotta, J.C. Telemedicine can replace the neurologist on a mobile stroke unit. Stroke 2017, 48, 493–496. [Google Scholar] [CrossRef] [PubMed]
- Audebert, H.; Fassbender, K.; Hussain, M.S.; Ebinger, M.; Turc, G.; Uchino, K.; Davis, S.; Alexandrov, A.; Grotta, J. The PRE-hospital stroke treatment organization. Int. J. Stroke 2017, 12, 932–940. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- EU 5G PPP Trials Working Group (Including J. Alcaraz Calero and Q. Wang). The 5G PPP Infrastructure-Trials and Pilots Brochure. Available online: https://5g-ppp.eu/wp-content/uploads/2019/09/5GInfraPPP_10TPs_Brochure_FINAL_low_singlepages.pdf (accessed on 24 June 2021).
- Martinez-Alpiste, I.; Jose, M.; Alcaraz, C.; Qi, W.; Gelayol, G.; Chirivella-Perez, E.; Salva-Garcia, P. 5G Can Shape Mission-Critical Healthcare Services. Available online: https://https://www.comsoc.org/publications/ctn/5g-can-shape-mission-critical-healthcare-services (accessed on 24 June 2021).
- MIoT. Internet of Medical Things Revolutionizing Healthcare. Available online: https://aabme.asme.org/posts/internet-of-medical-things-revolutionizing-healthcare (accessed on 26 June 2021).
- Lukowicz, P.; Anliker, U.; Ward, J.; Troster, G.; Hirt, E.; Neufelt, C. AMON: A wearable medical computer for high risk patients. In Proceedings of the Sixth International Symposium on Wearable Computers, Seattle, WA, USA, 10 October 2002; pp. 133–134. [Google Scholar]
- Diaz, K.M.; Krupka, D.J.; Chang, M.J.; Peacock, J.; Ma, Y.; Goldsmith, J.; Schwartz, J.E.; Davidson, K.W. Fitbit®: An accurate and reliable device for wireless physical activity tracking. Int. J. Cardiol. 2015, 185, 138. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Reeder, B.; David, A. Health at hand: A systematic review of smart watch uses for health and wellness. J. Biomed. Inform. 2016, 63, 269–276. [Google Scholar] [CrossRef]
- Trung, T.Q.; Ramasundaram, S.; Hwang, B.U.; Lee, N.E. An all-elastomeric transparent and stretchable temperature sensor for body-attachable wearable electronics. Adv. Mater. 2016, 28, 502–509. [Google Scholar] [CrossRef]
- Yamamoto, Y.; Yamamoto, D.; Takada, M.; Naito, H.; Arie, T.; Akita, S.; Takei, K. Efficient skin temperature sensor and stable gel-less sticky ECG sensor for a wearable flexible healthcare patch. Adv. Healthc. Mater. 2017, 6, 1700495. [Google Scholar] [CrossRef]
- Adiputra, R.; Hadiyoso, S.; Hariyani, Y.S. Internet of things: Low cost and wearable SpO2 device for health monitoring. Int. J. Electr. Comput. Eng. 2018, 8, 939. [Google Scholar] [CrossRef]
- Azhari, A.; Yoshimoto, S.; Nezu, T.; Iida, H.; Ota, H.; Noda, Y.; Araki, T.; Uemura, T.; Sekitani, T.; Morii, K. A patch-type wireless forehead pulse oximeter for SpO2 measurement. In Proceedings of the 2017 IEEE Biomedical Circuits and Systems Conference (BioCAS), Turin, Italy, 19–21 October 2017; pp. 1–4. [Google Scholar]
- Chacon, P.J.; Pu, L.; da Costa, T.H.; Shin, Y.H.; Ghomian, T.; Shamkhalichenar, H.; Wu, H.C.; Irving, B.A.; Choi, J.W. A wearable pulse oximeter with wireless communication and motion artifact tailoring for continuous use. IEEE Trans. Biomed. Eng. 2018, 66, 1505–1513. [Google Scholar] [CrossRef]
- Surrel, G.; Rincón, F.; Murali, S.; Atienza, D. Low-power wearable system for real-time screening of obstructive sleep apnea. In Proceedings of the 2016 IEEE Computer Society Annual Symposium on VLSI (ISVLSI), Pittsburgh, PA, USA, 11–13 July 2016; pp. 230–235. [Google Scholar]
- Shilaih, M.; Goodale, B.M.; Falco, L.; Kübler, F.; De Clerck, V.; Leeners, B. Modern fertility awareness methods: Wrist wearables capture the changes in temperature associated with the menstrual cycle. Biosci. Rep. 2018, 38, BSR20171279. [Google Scholar] [CrossRef] [Green Version]
- Xie, R.; Du, Q.; Zou, B.; Chen, Y.; Zhang, K.; Liu, Y.; Liang, J.; Zheng, B.; Li, S.; Zhang, W.; et al. Wearable leather-based electronics for respiration monitoring. ACS Appl. Bio Mater. 2019, 2, 1427–1431. [Google Scholar] [CrossRef]
- Mizuno, A.; Changolkar, S.; Patel, M.S. Wearable Devices to Monitor and Reduce the Risk of Cardiovascular Disease: Evidence and Opportunities. Annu. Rev. Med. 2020, 72, 459–471. [Google Scholar] [CrossRef] [PubMed]
- Holz, C.; Wang, E.J. Glabella: Continuously sensing blood pressure behavior using an unobtrusive wearable device. Proc. ACM Interactive Mobile Wearable Ubiquitous Technol. 2017, 1, 1–23. [Google Scholar] [CrossRef]
- Kuwabara, M.; Harada, K.; Hishiki, Y.; Kario, K. Validation of two watch-type wearable blood pressure monitors according to the ANSI/AAMI/ISO81060-2: 2013 guidelines: Omron HEM-6410T-ZM and HEM-6410T-ZL. J. Clin. Hypertens. 2019, 21, 853–858. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Arakawa, T. Recent research and developing trends of wearable sensors for detecting blood pressure. Sensors 2018, 18, 2772. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Escobedo, P.; Ramos-Lorente, C.E.; Martínez-Olmos, A.; Carvajal, M.A.; Ortega-Munoz, M.; de Orbe-Paya, I.; Hernández-Mateo, F.; Santoyo-González, F.; Capitán-Vallvey, L.F.; Palma, A.J.; et al. Wireless wearable wristband for continuous sweat pH monitoring. Sens. Actuators B Chem. 2021, 327, 128948. [Google Scholar] [CrossRef]
- Nakata, S.; Shiomi, M.; Fujita, Y.; Arie, T.; Akita, S.; Takei, K. A wearable pH sensor with high sensitivity based on a flexible charge-coupled device. Nat. Electron. 2018, 1, 596–603. [Google Scholar] [CrossRef]
- Wijsman, J.; Grundlehner, B.; Liu, H.; Hermens, H.; Penders, J. Towards mental stress detection using wearable physiological sensors. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August—3 September 2011; pp. 1798–1801. [Google Scholar]
- Valenza, G.; Nardelli, M.; Lanata, A.; Gentili, C.; Bertschy, G.; Paradiso, R.; Scilingo, E.P. Wearable monitoring for mood recognition in bipolar disorder based on history-dependent long-term heart rate variability analysis. IEEE J. Biomed. Health Inform. 2013, 18, 1625–1635. [Google Scholar] [CrossRef]
- Gruwez, A.; Bruyneel, A.V.; Bruyneel, M. The validity of two commercially-available sleep trackers and actigraphy for assessment of sleep parameters in obstructive sleep apnea patients. PLoS ONE 2019, 14, e0210569. [Google Scholar] [CrossRef]
- Lin, C.T.; Ko, L.W.; Chang, M.H.; Duann, J.R.; Chen, J.Y.; Su, T.P.; Jung, T.P. Review of wireless and wearable electroencephalogram systems and brain-computer interfaces–a mini-review. Gerontology 2010, 56, 112–119. [Google Scholar] [CrossRef] [Green Version]
- Casson, A.J.; Yates, D.C.; Smith, S.J.; Duncan, J.S.; Rodriguez-Villegas, E. Wearable electroencephalography. IEEE Eng. Med. Biol. Mag. 2010, 29, 44–56. [Google Scholar] [CrossRef] [Green Version]
- Ip, J.E. Wearable devices for cardiac rhythm diagnosis and management. JAMA 2019, 321, 337–338. [Google Scholar] [CrossRef] [PubMed]
- Jeon, B.; Lee, J.; Choi, J. Design and implementation of a wearable ECG system. Int. J. Smart Home 2013, 7, 61–69. [Google Scholar]
- Beniczky, S.; Conradsen, I.; Henning, O.; Fabricius, M.; Wolf, P. Automated real-time detection of tonic-clonic seizures using a wearable EMG device. Neurology 2018, 90, e428–e434. [Google Scholar] [CrossRef] [Green Version]
- Tsubouchi, Y.; Suzuki, K. BioTones: A wearable device for EMG auditory biofeedback. In Proceedings of the 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology, Buenos Aires, Argentina, 31 August–4 September 2010; pp. 6543–6546. [Google Scholar]
- Nathan, V.; Jafari, R. Particle filtering and sensor fusion for robust heart rate monitoring using wearable sensors. IEEE J. Biomed. Health Inform. 2017, 22, 1834–1846. [Google Scholar] [CrossRef] [PubMed]
- Park, J.H.; Jang, D.G.; Park, J.W.; Youm, S.K. Wearable sensing of in-ear pressure for heart rate monitoring with a piezoelectric sensor. Sensors 2015, 15, 23402–23417. [Google Scholar] [CrossRef] [Green Version]
- El-Amrawy, F.; Nounou, M.I. Are currently available wearable devices for activity tracking and heart rate monitoring accurate, precise, and medically beneficial? Healthc. Inform. Res. 2015, 21, 315. [Google Scholar] [CrossRef]
- Tsai, C.W.; Li, C.H.; Lam, R.W.K.; Li, C.K.; Ho, S. Diabetes care in motion: Blood glucose estimation using wearable devices. IEEE Consum. Electron. Mag. 2019, 9, 30–34. [Google Scholar] [CrossRef]
- Cappon, G.; Acciaroli, G.; Vettoretti, M.; Facchinetti, A.; Sparacino, G. Wearable continuous glucose monitoring sensors: A revolution in diabetes treatment. Electronics 2017, 6, 65. [Google Scholar] [CrossRef] [Green Version]
- Pickup, J.C. Insulin-pump therapy for type 1 diabetes mellitus. N. Engl. J. Med. 2012, 366, 1616–1624. [Google Scholar] [CrossRef]
- Weissberg-Benchell, J.; Antisdel-Lomaglio, J.; Seshadri, R. Insulin pump therapy: A meta-analysis. Diabetes Care 2003, 26, 1079–1087. [Google Scholar] [CrossRef] [Green Version]
- Gadaleta, M.; Facchinetti, A.; Grisan, E.; Rossi, M. Prediction of adverse glycemic events from continuous glucose monitoring signal. IEEE J. Biomed. Health Inform. 2018, 23, 650–659. [Google Scholar] [CrossRef] [PubMed]
- Angelucci, A.; Kuller, D.; Aliverti, A. A home telemedicine system for continuous respiratory monitoring. IEEE J. Biomed. Health Inform. 2020, 25, 1247–1256. [Google Scholar] [CrossRef]
- Scherer, M.; Menachery, K.; Magno, M. SmartAid: A Low-Power Smart Hearing Aid For Stutterers. In Proceedings of the 2019 IEEE Sensors Applications Symposium (SAS), Sophia Antipolis, France, 11–13 March 2019; pp. 1–6. [Google Scholar]
- Sudharsan, B.; Chockalingam, M. A microphone array and voice algorithm based smart hearing aid. arXiv 2019, arXiv:1908.07324. [Google Scholar] [CrossRef]
- DJordjevic, S.; Stancin, S.; Meglc, A.; Milutinovic, V.; Tomazic, S. Mc sensor—A novel method for measurement of muscle tension. Sensors 2011, 11, 9411–9425. [Google Scholar]
- Mansuri, B.; Torabinejhad, F.; Jamshidi, A.A.; Dabirmoghaddam, P.; Vasaghi-Gharamaleki, B.; Ghelichi, L. Transcutaneous electrical nerve stimulation combined with voice therapy in women with muscle tension dysphonia. J. Voice 2020, 34, 490.e11–490.e21. [Google Scholar] [CrossRef]
- Velázquez, R. Wearable assistive devices for the blind. In Wearable and Autonomous Biomedical Devices and Systems for Smart Environment; Springer: Berlin/Heidelberg, Germany, 2010; pp. 331–349. [Google Scholar]
- Garcia-Macias, J.A.; Ramos, A.G.; Hasimoto-Beltran, R.; Hernandez, S.E.P. Uasisi: A modular and adaptable wearable system to assist the visually impaired. Procedia Comput. Sci. 2019, 151, 425–430. [Google Scholar] [CrossRef]
- Savindu, H.P.; Iroshan, K.; Panangala, C.D.; Perera, W.; De Silva, A.C. BrailleBand: Blind support haptic wearable band for communication using braille language. In Proceedings of the 2017 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Banff, AB, Canada, 5–8 October 2017; pp. 1381–1386. [Google Scholar]
- Sun, M.; Burke, L.E.; Mao, Z.H.; Chen, Y.; Chen, H.C.; Bai, Y.; Li, Y.; Li, C.; Jia, W. eButton: A wearable computer for health monitoring and personal assistance. In Proceedings of the 51st Annual Design Automation Conference, San Francisco, CA, USA, 1–5 June 2014; pp. 1–6. [Google Scholar]
- Kapur, A.; Kapur, S.; Maes, P. Alterego: A personalized wearable silent speech interface. In Proceedings of the 23rd International Conference on Intelligent User Interfaces, Tokyo, Japan, 7–11 March 2018; pp. 43–53. [Google Scholar]
- Marjanovic, N.; Piccinini, G.; Kerr, K.; Esmailbeigi, H. TongueToSpeech (TTS): Wearable wireless assistive device for augmented speech. In Proceedings of the 2017 39th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Jeju, Korea, 11–15 July 2017; pp. 3561–3563. [Google Scholar]
- Huo, W.; Mohammed, S.; Moreno, J.C.; Amirat, Y. Lower limb wearable robots for assistance and rehabilitation: A state of the art. IEEE Syst. J. 2014, 10, 1068–1081. [Google Scholar] [CrossRef]
- Hadi, A.; Alipour, K.; Kazeminasab, S.; Elahinia, M. ASR glove: A wearable glove for hand assistance and rehabilitation using shape memory alloys. J. Intell. Mater. Syst. Struct. 2018, 29, 1575–1585. [Google Scholar] [CrossRef]
- Gandolla, M.; Antonietti, A.; Longatelli, V.; Pedrocchi, A. The effectiveness of wearable upper limb assistive devices in degenerative neuromuscular diseases: A systematic review and meta-analysis. Front. Bioeng. Biotechnol. 2020, 7, 450. [Google Scholar] [CrossRef] [Green Version]
- Chen, B.; Zhong, C.H.; Zhao, X.; Ma, H.; Guan, X.; Li, X.; Liang, F.Y.; Cheng, J.C.Y.; Qin, L.; Law, S.W.; et al. A wearable exoskeleton suit for motion assistance to paralysed patients. J. Orthop. Transl. 2017, 11, 7–18. [Google Scholar] [CrossRef]
- Delahoz, Y.S.; Labrador, M.A. Survey on fall detection and fall prevention using wearable and external sensors. Sensors 2014, 14, 19806–19842. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, D.; Feng, W.; Zhang, Y.; Li, X.; Wang, T. A wearable wireless fall detection system with accelerators. In Proceedings of the 2011 IEEE International Conference on Robotics and Biomimetics, Karon Beach, Thailand, 7–11 December 2011; pp. 2259–2263. [Google Scholar]
- Yi, W.J.; Saniie, J. Design flow of a wearable system for body posture assessment and fall detection with android smartphone. In Proceedings of the 2014 IEEE International Technology Management Conference, Chicago, IL, USA, 12–15 June 2014; pp. 1–4. [Google Scholar]
- Bruno, E.; Biondi, A.; Thorpe, S.; Richardson, M.; Consortium, R.C. Patients self-mastery of wearable devices for seizure detection: A direct user-experience. Seizure 2020, 81, 236–240. [Google Scholar] [CrossRef]
- Jeppesen, J.; Fuglsang-Frederiksen, A.; Johansen, P.; Christensen, J.; Wüstenhagen, S.; Tankisi, H.; Qerama, E.; Hess, A.; Beniczky, S. Seizure detection based on heart rate variability using a wearable electrocardiography device. Epilepsia 2019, 60, 2105–2113. [Google Scholar] [CrossRef]
- Pierleoni, P.; Belli, A.; Palma, L.; Pellegrini, M.; Pernini, L.; Valenti, S. A high reliability wearable device for elderly fall detection. IEEE Sens. J. 2015, 15, 4544–4553. [Google Scholar] [CrossRef]
- Atallah, L.; Lo, B.; King, R.; Yang, G.Z. Sensor positioning for activity recognition using wearable accelerometers. IEEE Trans. Biomed. Circuits Syst. 2011, 5, 320–329. [Google Scholar] [CrossRef]
- Ouyang, H.; Liu, Z.; Li, N.; Shi, B.; Zou, Y.; Xie, F.; Ma, Y.; Li, Z.; Li, H.; Zheng, Q.; et al. Symbiotic cardiac pacemaker. Nat. Commun. 2019, 10, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Eicken, A.; Kolb, C.; Lange, S.; Brodherr-Heberlein, S.; Zrenner, B.; Schreiber, C.; Hess, J. Implantable cardioverter defibrillator (ICD) in children. Int. J. Cardiol. 2006, 107, 30–35. [Google Scholar] [CrossRef] [PubMed]
- Van der Kroft, S. Design and Validation of an Implantable Actuator for Use in a Novel Dynamic Arteriovenous Shunt System. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2021. [Google Scholar]
- Shiba, K.; Tsuji, T.; Koshiji, K. Direct drive of an implantable actuator using a transcutaneous energy transmission system. J. Life Support Eng. 2006, 18, 17–24. [Google Scholar] [CrossRef]
- BAN Applications Matrix, Document 15-07-0735-08-0. 2008. Available online: https://www.ieee802.org/15/pub/default_page.html (accessed on 15 June 2021).
- Rong, G.; Zheng, Y.; Sawan, M. Energy Solutions for Wearable Sensors: A Review. Sensors 2021, 21, 3806. [Google Scholar] [CrossRef]
- Kos, A.; Milutinović, V.; Umek, A. Challenges in wireless communication for connected sensors and wearable devices used in sport biofeedback applications. Future Gener. Comput. Syst. 2019, 92, 582–592. [Google Scholar] [CrossRef]
- Ullah, S.; Khan, P.; Ullah, N.; Saleem, S.; Higgins, H.; Kwak, K.S. A review of wireless body area networks for medical applications. arXiv 2010, arXiv:1001.0831. [Google Scholar] [CrossRef] [Green Version]
- Movassaghi, S.; Abolhasan, M.; Lipman, J.; Smith, D.; Jamalipour, A. Wireless body area networks: A survey. IEEE Commun. Surv. Tutor. 2014, 16, 1658–1686. [Google Scholar] [CrossRef]
- TG6 Applications Matrix, Document 15-08-0406-00-0006, IEEE P802. 2008. Available online: https://view.officeapps.live.com/op/view.aspx?src=https%3A%2F%2Fmentor.ieee.org%2F802.15%2Fdcn%2F08%2F15-08-0644-09-0006-tg6-technical-requirements-document.doc (accessed on 7 June 2021).
- Jones, R.W.; Katzis, K. 5G and wireless body area networks. In Proceedings of the 2018 IEEE Wireless Communications and Networking Conference Workshops (WCNCW), Barcelona, Spain, 15–18 April 2018; pp. 373–378. [Google Scholar]
- Soh, P.J.; Vandenbosch, G.A.; Mercuri, M.; Schreurs, D.M.P. Wearable wireless health monitoring: Current developments, challenges, and future trends. IEEE Microw. Mag. 2015, 16, 55–70. [Google Scholar] [CrossRef]
- Santagati, G.E.; Melodia, T. A software-defined ultrasonic networking framework for wearable devices. IEEE/ACM Trans. Netw. 2016, 25, 960–973. [Google Scholar] [CrossRef]
- Garcia-Perez, C.; Diaz-Zayas, A.; Rios, A.; Merino, P.; Katsalis, K.; Chang, C.Y.; Shariat, S.; Nikaein, N.; Rodriguez, P.; Morris, D. Improving the efficiency and reliability of wearable based mobile eHealth applications. Pervasive Mob. Comput. 2017, 40, 674–691. [Google Scholar] [CrossRef]
- Sahni, Y.; Cao, J.; Zhang, S.; Yang, L. Edge mesh: A new paradigm to enable distributed intelligence in internet of things. IEEE Access 2017, 5, 16441–16458. [Google Scholar] [CrossRef]
- Gia, T.N.; Jiang, M.; Rahmani, A.M.; Westerlund, T.; Liljeberg, P.; Tenhunen, H. Fog computing in healthcare internet of things: A case study on ecg feature extraction. In Proceedings of the 2015 IEEE International Conference on Computer and INFORMATION technology; Ubiquitous Computing and Communications; Dependable, Autonomic and Secure Computing; Pervasive Intelligence and Computing, Liverpool, UK, 26–28 October 2015; pp. 356–363. [Google Scholar]
- ISO standard. ANSI/AAMI/ISO 14971:2019-Medical Devices-Application of Risk Management to Medical Devices. Available online: https://www.iso.org/standard/72704.html (accessed on 20 June 2021).
- FDA. Content of Premarket Submissions for Management of Cybersecurity in Medical Devices: Draft Guidance for Industry and Food and Drug Administration Staff. Available online: https://www.fda.gov/media/119933/download (accessed on 25 September 2021).
- Motani, M.; Yap, K.K.; Natarajan, A.; de Silva, B.; Hu, S.; Chua, K.C. Network characteristics of urban environments for wireless BAN. In Proceedings of the 2007 IEEE Biomedical Circuits and Systems Conference, Montreal, QC, Canada, 27–30 November 2007; pp. 179–182. [Google Scholar]
- Al Kalaa, M.O.; Balid, W.; Refai, H.H.; LaSorte, N.J.; Seidman, S.J.; Bassen, H.I.; Silberberg, J.L.; Witters, D. Characterizing the 2.4 GHz spectrum in a hospital environment: Modeling and applicability to coexistence testing of medical devices. IEEE Trans. Electromagn. Compat. 2016, 59, 58–66. [Google Scholar] [CrossRef]
- Qualcomm Technologies, Inc. VR and AR Pushing Connectivity Limits. Available online: https://www.qualcomm.com/media/documents/files/vr-and-ar-pushing-connectivity-limits.pdf (accessed on 25 June 2021).
- Pozo, A.P.; Toksvig, M.; Schrager, T.F.; Hsu, J.; Mathur, U.; Sorkine-Hornung, A.; Szeliski, R.; Cabral, B. An integrated 6DoF video camera and system design. ACM Trans. Graph. (TOG) 2019, 38, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Feil-Seifer, D.; Mataric, M.J. Defining socially assistive robotics. In Proceedings of the 9th International Conference on Rehabilitation Robotics, 2005, ICORR 2005, Chicago, IL, USA, 28 June–1 July 2005; pp. 465–468. [Google Scholar]
- Pavón-Pulido, N.; López-Riquelme, J.A.; Ferruz-Melero, J.; Vega-Rodríguez, M.Á.; Barrios-León, A.J. A service robot for monitoring elderly people in the context of ambient assisted living. J. Ambient Intell. Smart Environ. 2014, 6, 595–621. [Google Scholar] [CrossRef]
- Bonaccorsi, M.; Fiorini, L.; Cavallo, F.; Esposito, R.; Dario, P. Design of cloud robotic services for senior citizens to improve independent living and personal health management. In Ambient Assisted Living; Springer: Berlin/Heidelberg, Germany, 2015; pp. 465–475. [Google Scholar]
- Ma, Y.; Zhang, Y.; Wan, J.; Zhang, D.; Pan, N. Robot and cloud-assisted multi-modal healthcare system. Clust. Comput. 2015, 18, 1295–1306. [Google Scholar] [CrossRef]
- Gross, H.M.; Mueller, S.; Schroeter, C.; Volkhardt, M.; Scheidig, A.; Debes, K.; Richter, K.; Doering, N. Robot companion for domestic health assistance: Implementation, test and case study under everyday conditions in private apartments. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 5992–5999. [Google Scholar]
- Manzi, A.; Fiorini, L.; Limosani, R.; Sincak, P.; Dario, P.; Cavallo, F. Use case evaluation of a cloud robotics teleoperation system (short paper). In Proceedings of the 2016 5th IEEE International Conference on Cloud Networking (Cloudnet), Pisa, Italy, 3–5 October 2016; pp. 208–211. [Google Scholar]
- Bonaccorsi, M.; Fiorini, L.; Cavallo, F.; Saffiotti, A.; Dario, P. A cloud robotics solution to improve social assistive robots for active and healthy aging. Int. J. Soc. Robot. 2016, 8, 393–408. [Google Scholar] [CrossRef] [Green Version]
- Fiorini, L.; Esposito, R.; Bonaccorsi, M.; Petrazzuolo, C.; Saponara, F.; Giannantonio, R.; De Petris, G.; Dario, P.; Cavallo, F. Enabling personalised medical support for chronic disease management through a hybrid robot-cloud approach. Auton. Robot. 2017, 41, 1263–1276. [Google Scholar] [CrossRef] [Green Version]
- Cádrik, T.; Takáč, P.; Ondo, J.; Sinčák, P.; Mach, M.; Jakab, F.; Cavallo, F.; Bonaccorsi, M. Cloud-based robots and intelligent space teleoperation tools. In Robot Intelligence Technology and Applications 4; Springer: Berlin/Heidelberg, Germany, 2017; pp. 599–610. [Google Scholar]
- Cavallo, F.; Limosani, R.; Fiorini, L.; Esposito, R.; Furferi, R.; Governi, L.; Carfagni, M. Design impact of acceptability and dependability in assisted living robotic applications. Int. J. Interact. Des. Manuf. (IJIDeM) 2018, 12, 1167–1178. [Google Scholar] [CrossRef]
- Brunete, A.; Gambao, E.; Hernando, M.; Cedazo, R. Smart Assistive Architecture for the Integration of IoT Devices, Robotic Systems, and Multimodal Interfaces in Healthcare Environments. Sensors 2021, 21, 2212. [Google Scholar] [CrossRef]
- Tröbinger, M.; Jähne, C.; Qu, Z.; Elsner, J.; Reindl, A.; Getz, S.; Goll, T.; Loinger, B.; Loibl, T.; Kugler, C.; et al. Introducing GARMI-A Service Robotics Platform to Support the Elderly at Home: Design Philosophy, System Overview and First Results. IEEE Robot. Autom. Lett. 2021, 6, 5857–5864. [Google Scholar] [CrossRef]
- Witrisal, K.; Meissner, P.; Leitinger, E.; Shen, Y.; Gustafson, C.; Tufvesson, F.; Haneda, K.; Dardari, D.; Molisch, A.F.; Conti, A.; et al. High-accuracy localization for assisted living: 5G systems will turn multipath channels from foe to friend. IEEE Signal Process. Mag. 2016, 33, 59–70. [Google Scholar] [CrossRef]
- RADIO Project. Unobtrusive, Efficient, Reliable and Modular Solutions for Independent Ageing. Available online: http://www.radio-project.eu/ (accessed on 24 June 2021).
- Ramoly, N.; Bouzeghoub, A.; Finance, B. A framework for service robots in smart home: An efficient solution for domestic healthcare. IRBM 2018, 39, 413–420. [Google Scholar] [CrossRef] [Green Version]
- Kaneriya, S.; Vora, J.; Tanwar, S.; Tyagi, S. Standardising the use of duplex channels in 5G-WiFi networking for ambient assisted living. In Proceedings of the 2019 IEEE International Conference on Communications Workshops (ICC Workshops), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar]
- Henry, S.; Alsohaily, A.; Sousa, E.S. 5G is real: Evaluating the compliance of the 3GPP 5G new radio system with the ITU IMT-2020 requirements. IEEE Access 2020, 8, 42828–42840. [Google Scholar] [CrossRef]
- European 5G Observatory. 5G Trials That Have Been Publicly Announced in EU27, UK, Norway, Russia, Switzerland and Turkey. Available online: https://5gobservatory.eu/5g-trial/major-european-5g-trials-and-pilots/ (accessed on 25 June 2021).
- sdx Central. 5G Trials in the United States—Steps Toward Standardization. Available online: https://www.sdxcentral.com/5g/definitions/5g-trials/ (accessed on 25 June 2021).
- Verizon. Verizon Will Rapidly Integrate C-Band Spectrum with mmWave for Customers. Available online: https://www.verizon.com/about/news/verizon-c-band-spectrum-mmwave (accessed on 25 June 2021).
- Verizon. Explore 4G LTE and 5G Network Coverage in Your Area. Available online: https://www.verizon.com/coverage-map/ (accessed on 26 June 2021).
- AT&T. Wireless Coverage. Available online: https://www.att.com/maps/wireless-coverage.html (accessed on 26 June 2021).
- T-Mobile. Coverage Maps. Available online: https://www.t-mobile.com/coverage/coverage-map (accessed on 26 June 2021).
- Opensignal. How AT&T, Sprint, T-Mobile and Verizon Differ in Their Early 5G Approach. Available online: https://www.opensignal.com/2020/02/20/how-att-sprint-t-mobile-and-verizon-differ-in-their-early-5g-approach (accessed on 25 June 2021).
- Digital Trends. 5G vs. 4G: HowWill the Newest Network Improve on the Last? Available online: https://www.digitaltrends.com/mobile/5g-vs-4g/ (accessed on 25 June 2021).
- Forbes. 5G Latency Improvements Are Still Lagging. Available online: https://www.forbes.com/sites/bobodonnell/2020/02/18/5g-latency-improvements-are-still-lagging/?sh=6d74337548f1 (accessed on 25 June 2021).
- Carrozzo, G.; Siddiqui, M.S.; Du, K.; Sayadi, B.; Carrasco, O.; Lazarakis, F.; Sterle, J.; Bruschi, R. Definition and Evaluation of Latency in 5G with Heterogeneous Use Cases and Architectures. Available online: https://www.5gcity.eu/wp-content/uploads/2020/05/Definition-and-Evaluation-of-Latency-in-5G-with-Heterogeneous-Use-Cases-and-Architectures.pdf (accessed on 20 October 2021).
- Asghar, A.; Farooq, H.; Imran, A. Concurrent CCO and LB optimization in emerging HetNets: A novel solution and comparative analysis. In Proceedings of the 2018 IEEE 29th Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Bologna, Italy, 9–12 September 2018; pp. 1–6. [Google Scholar]
- Qureshi, H.N.; Imran, A. On the tradeoffs between coverage radius, altitude, and beamwidth for practical UAV deployments. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 2805–2821. [Google Scholar] [CrossRef]
- Park, S.H.; Kang, N.G.; Cho, C.; Won, E.T.; Patro, R.K.; Goyal, G.; Bhatia, A.; Bynam, K.; Naniyat, A. System Simulation Metrics for BAN—Samsung. Project: IEEE P802.15 Working Group for Wireless Personal Area Networks (WPANs). 2008. Available online: https://mentor.ieee.org/802.15/file/08/15-08-0630-00-0006-system-simulation-metrics-for-ban.ppt (accessed on 20 October 2021).
- Qureshi, H.N.; Manalastas, M.; Imran, A.; Kalaa, M.O.A. Service Level Agreements for 5G-Enabled Healthcare Systems: Challenges and Considerations. IEEE Netw. 2021, 1–8. [Google Scholar] [CrossRef]
- Tian, W.; Fan, M.; Zeng, C.; Liu, Y.; He, D.; Zhang, Q. Telerobotic spinal surgery based on 5G network: The first 12 cases. Neurospine 2020, 17, 114. [Google Scholar] [CrossRef]
- Parvez, I.; Rahmati, A.; Guvenc, I.; Sarwat, A.I.; Dai, H. A survey on low latency towards 5G: RAN, core network and caching solutions. IEEE Commun. Surv. Tutor. 2018, 20, 3098–3130. [Google Scholar] [CrossRef]
- Ron Malenfant, Cisco. Industry Voices—5G Has the Potential to Transform Healthcare for Rural Communities. Available online: https://www.fiercehealthcare.com/tech/industry-voices-5g-has-potential-to-transform-healthcare-for-rural-communities (accessed on 20 October 2021).
- OTH Amberg-Weiden. 5G4Healthcare. Available online: https://www.oth-aw.de/en/research-and-cooperation/latest-news-in-research/5g4healthcare/homepage/ (accessed on 12 January 2020).
- Acemoglu, A.; Peretti, G.; Trimarchi, M.; Hysenbelli, J.; Krieglstein, J.; Geraldes, A.; Deshpande, N.; Ceysens, P.M.V.; Caldwell, D.G.; Delsanto, M.; et al. Operating from a distance: Robotic vocal cord 5G telesurgery on a cadaver. Ann. Intern. Med. 2020, 173, 940–941. [Google Scholar] [CrossRef] [PubMed]
- Jell, A.; Vogel, T.; Ostler, D.; Marahrens, N.; Wilhelm, D.; Samm, N.; Eichinger, J.; Weigel, W.; Feussner, H.; Friess, H.; et al. 5th-Generation Mobile Communication: Data Highway for Surgery 4.0. Surg. Technol. Int. 2019, 35, 36–42. [Google Scholar] [PubMed]
- Lacy, A.; Bravo, R.; Otero-Piñeiro, A.; Pena, R.; De Lacy, F.; Menchaca, R.; Balibrea, J. 5G-assisted telementored surgery. Br. J. Surg. 2019, 106, 1576–1579. [Google Scholar] [CrossRef] [Green Version]
- Zheng, J.; Wang, Y.; Zhang, J.; Guo, W.; Yang, X.; Luo, L.; Jiao, W.; Hu, X.; Yu, Z.; Wang, C.; et al. 5G ultra-remote robot-assisted laparoscopic surgery in China. Surg. Endosc. 2020, 34, 5172–5180. [Google Scholar] [CrossRef]
| Use Case | KPIs | Data Type | Tools | Study Year |
|---|---|---|---|---|
| Ambulance transporting stroke patients to hospital | Throughput, number of reconnections | Audio, video, and vital signs | TeleBAT system in ambulance | [54] 2000 |
| Ambulance transporting cardiac patients to hospital | Retainability, PLR | 12-lead ECGs | Rhythm-surveillance and defibrillation equipment | [55] 2002 |
| Ambulance transporting cardiac patients to hospital | Latency, PLR | 12-Lead ECG | Philips standard (basic device model without advanced features such as computer-assisted ECG interpretations), embedded, and integrated ECG device | [56] 2010 |
| Ambulance transporting stroke patients to hospital | Retainability | Audio, video | VIMED CAR, head and body cameras, and specialized microphones | [57] 2012 |
| Ambulance transporting stroke patients to hospital | Retainability, bandwidth (mean and maximal upload and download speeds for data transfer), accessibility | Audio-video, blood pressure, heart rate, blood oxygen saturation, glycemia, and electronic patient identification | PreSSUB 3.0 system in ambulance | [58] 2014 |
| Ambulance transporting stroke patients to hospital | Reliability, retainability | Audio, video | In-Touch RP-Xpress telemedicine device, Verizon Jetpack 4G LTE mobile hotspot (4620LE) for 4G LTE | [59] 2014 |
| Ambulance transporting stroke patients to hospital | Bandwidth (median maximal and average upload download speed) | Audio-video, blood pressure, heart rate, blood oxygen saturation, glycemia, temperature, cardiac rhythm, Glasgow Coma Scale (GCS), and electronic patient identification | PreSSUB 3.0 system in ambulance | [60] 2016 |
| Mobile stroke treatment units for patients with acute onset of stroke-like symptoms | Service restoration time, PLR, and latency | CT, audio-video, and vital signs | MSTUs with CT system, camera (RP-Xpress; InTouch Health) | [61] 2016 |
| Testing of video encoding framework on ultrasound videos of carotid artery in connected ambulance scenario | Bitrate, data rate, time-varying bandwidth availability | Ultrasound videos of the common carotid artery | Multi-objective optimization, Philips ATL 5000 ultrasound machine, x265 open source software, and Ubuntu 14.04.4 LTS/Linux 64-bit platform | [62] 2017 |
| A mobile small cell-based ambulance in the uplink direction in a heterogeneous network | Latency, data rate, PLR, retainability, and spectral efficiency | Ultrasound video | LTE Sim system level simulator | [63] 2018 |
| Project proposal aiming to capture more than 6000 ambulances across the UK provided by 200 different vendors | Latency, data rate, PLR | Ultrasound video, in-ambulance video vital signs, EEG, ECG, force, vibration | Sonography and vital-signs-measuring equipment in ambulances | [21] 2019 |
| Connected ambulance prototype study with QoS control in network slicing environment | Uplink/downlink throughput, latency (average per-hop) | Video slices (eHealth, conferencing, surveillance and entertainment) | MEC-based TeleStroke service by SliceNet, NetFPGA cards, SimpleSumeSwitch architecture, LTE eNodeBs, OpenFlow-enabled switches, Software Development Kit (SDK), Dell Edge Gateway, and P4 NetFPGA | [64] 2019 |
| Connected Ambulance prototype study in network slicing environment | Average packet loss, latency (round trip time), throughput (frames per second) | Audio, video | eHealth infrastructure at Dell, Ireland, pfSense security, OpenVPN, Dell Edge Gateway series 3003, LTE SIMS, OpenMANO OSM, and MEC by SliceNET | [65] 2019 |
| Prediction of ambulances’ future locations to overcome mobility-based challanges | Position accuracy | GPS data | Apache Spark, Spark SQL, and algorithms | [66] 2020 |
| Proposition of an architecture for connected ambulance | Uplink/downlink rate, number of device connections, latency, speed, reliability, and jitter | Ultrasound image, vital signs, and video | Vital signs monitor, ultrasound equipment, and video cameras | [67] 2020 |
| Report compiled by industry experts and academic researchers based on their studies | Latency, jitter, survival time, communication service availability, reliability, and data rate | 4K video, audio | Reference given to [22] | [11] 2020 |
| Simulation of mobile ambulance using emulated biosensor data | Latency, average throughput, and PLR | Body temperature, blood pressure, and heart rate | Data Distribution Service (DDS) middleware, and biosensor emulator | [68,69,70] 2015, 2020 |
| Ambulance transporting stroke patients in rural area to hospital | Retainability, reliability | Audio, video, | iPad, Jabber video app, University of Virginia Health System firewall, COR IBR600 LE-VZ; CradlePoint router, 4G Verizon Wireless sim, and AP-CW-M-S22-RP2-BL and AP-CG-S22-BL antennas | [71,72] 2016, 2020 |
| Connected ambulance evaluation in network slicing environment using a test platform | Downlink/uplink data rate, and uplink latency | Video, CT image, vital signals, and medical record | 5G customer-premises equipment (CPE) signal transceiver, 5G user plane function (UPF) gateway service flow forwarding device, and medical data acquisition device, MEC cloud computing node | [73] 2021 |
| Stroke patients in mobile stroke units en route to hospital | Reliability, retainability | Audio, video, ECG, and vital signs | MEYTEC GmbH telemedicine systems of Vimed car and Vimed Doc for videoconferencing and teleradiology | [74,75] 2019, 2021 |
| KPI | Service Robot | Assigned Tasks | Target Population | Study |
|---|---|---|---|---|
| UE battery | Mobile robot BENDER with telepresence capabilities | Assistance in routine tasks and user localization | Elderly | [161] |
| Latency, PLR | Companion robot | User finding and medication reminder | Elderly | [162] |
| Latency, data rate | Cloud robot | Monitoring of vital signs | Elderly | [163] |
| Accessibility, position accuracy | Domestic health assistant Max | Assistance in routine tasks, user searching and following | Healthy elderly | [164] |
| Throughput (packets per seconds) | Domestic robot DoRo | Video streaming through robot cameras | Elderly and children | [165] |
| Latency, PLR, position accuracy (mean localization error) | Service robot | Recognition and localization of users | Healthy elderly | [166] |
| Latency (round trip time), retainability (total service time) | Mobile robot DoRo | Personalized medical support and pre-set reminder event | Elderly people with chronic diseases (multimorbidity) | [167] |
| Latency, reliability | Nao, Qbo and Hanson robots | Streaming of teleoperation website | Elderly and children | [168] |
| Position accuracy | ASTRO robot | Assistance in routine tasks, health related reminders | Healthy elderly | [169] |
| Position accuracy | Assistive robotic arm | Tablet placement infront of patient | Patients with limited or no mobility | [170] |
| Position accuracy | Mobile humanoid robot GARMI | Support for household tasks and emergency assistance | Elderly and patients | [171] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qureshi, H.N.; Manalastas, M.; Ijaz, A.; Imran, A.; Liu, Y.; Al Kalaa, M.O. Communication Requirements in 5G-Enabled Healthcare Applications: Review and Considerations. Healthcare 2022, 10, 293. https://doi.org/10.3390/healthcare10020293
Qureshi HN, Manalastas M, Ijaz A, Imran A, Liu Y, Al Kalaa MO. Communication Requirements in 5G-Enabled Healthcare Applications: Review and Considerations. Healthcare. 2022; 10(2):293. https://doi.org/10.3390/healthcare10020293
Chicago/Turabian StyleQureshi, Haneya Naeem, Marvin Manalastas, Aneeqa Ijaz, Ali Imran, Yongkang Liu, and Mohamad Omar Al Kalaa. 2022. "Communication Requirements in 5G-Enabled Healthcare Applications: Review and Considerations" Healthcare 10, no. 2: 293. https://doi.org/10.3390/healthcare10020293
APA StyleQureshi, H. N., Manalastas, M., Ijaz, A., Imran, A., Liu, Y., & Al Kalaa, M. O. (2022). Communication Requirements in 5G-Enabled Healthcare Applications: Review and Considerations. Healthcare, 10(2), 293. https://doi.org/10.3390/healthcare10020293