1. Introduction
Monitoring the state of various technical, social, and biological systems using non-linear mathematical models and modern information technology is a widely relied upon trend in the development of modern civilization. An example is the state estimation and control in modern electric power systems. Renewable energy sources and distributed generation, electric vehicles and charging networks, and the increased use of power electronics pose new challenges for the monitoring and controling of complex oscillations in energy systems [
1]. New problems require the development of new methods for the analysis of non-linear dynamic systems, including computational methods for their solutions.
Bilinear control systems represent an important class of non-linear systems, which are linear in inputs and states, but they are not linear in both. Research in the field of non-linear and “weakly non-linear” control systems described by the Volterra series dates back more than half a century. In [
2], a theory of realization was developed, and structural decompositions of the Gramians of bilinear systems were investigated; furthermore, explicit representations of the Gramian of a bilinear system were obtained in the form of a Volterra series, and the conditions for its convergence were investigated. In [
3,
4], the multivariate Laplace transform was used to construct a solution for systems with smooth non-linearities. In [
5], an iterative solution of the generalized Lyapunov equation was obtained, which was first used to analyze the state of an electric power system. It was shown that a solution to this equation exists if the linear part of the bilinear system is stable, and the input signal and non-linearity matrices are bounded in the norm. In [
6], these results were generalized for multiple-input and multiple-output (MIMO) dynamical systems.
Research in the field of bilinear control systems is closely related to the problem of model order reduction (MOR) by constructing an approximating model of a lower dimension. Among the methods for solving this problem, we note balanced truncation, singular decomposition, the Krylov subspace method, optimal methods for the
-norm of Gramians, and hybrid methods. For most of the methods, iterative algorithms for their implementation have been developed, and conditions for the existence and uniqueness of the solution of the corresponding generalized Lyapunov equations have been established [
6,
7,
8,
9]. In these studies, the squared
-norm of Gramians of the bilinear system was used, and its spectral expansions using singular values were obtained. To estimate the error between the full and reduced models, energy functionals were introduced, and the corresponding
-norm optimal algorithms for the interpolation of bilinear systems were proposed.
Modal analysis and selective modal analysis are among the main methods for analyzing the stability of electric power systems with small deviations from the steady state. These methods involve identifying dominant weakly stable modes of the power system and are widely used in combination with other linear and non-linear analysis methods [
1,
10]. To assess bilinear effects in power systems analysis, the technique of normal forms [
11], modal series methods [
12], and bilinear approximation [
13] are used. These methods consider the higher-order terms of the Taylor expansion in the system approximation and use normal Poincaré forms. In [
14], a method was proposed for the fast computation of normal forms, considering the interaction of dominant modes. Ref. [
15] proposes a hybrid method combining selective modal analysis and Koopman mode decomposition.
In contrast to these methods, in this study, we consider the spectral decomposition, not for the instantaneous dynamics of state variables, but for the Lyapunov functions, which characterize the
-norms of variables or signals in the time domain. This approach allows us to consider the non-linear effects associated with the accumulation of influence over time. For linear dynamic systems, Lyapunov functions are usually associated with the controllability and observability Gramians, which characterize the integrated energy of the input and output signals. The concept of Gramians was further generalized and interpreted for deterministic bilinear systems using energy functionals [
16]. For linear systems, ref. [
7] obtained singular expansions for infinite Gramians of controllability and observability based on the diagonalization of the dynamics matrix. A more general form of the spectral decomposition of Gramians into components (sub-Gramians) corresponding to the individual eigenvalues of the system or their pairwise combinations was proposed in [
17,
18]. In [
19], the spectral expansions for the Gramians of controllability and observability were generalized to the case of bilinear continuous systems.
The purpose of this study is to develop and provide a rationale for the application of the spectral expansions of the Gramians proposed in [
19] for the analysis and monitoring of bilinear systems. As the state of a bilinear system is not the sum of eigenmodes as in the linear case, a number of important theoretical questions arise. How should eigenmodes be viewed and interpreted in a bilinear system? What interpretation can be given to the spectral expansions of the Gramians in [
19]? What is their connection with the expansion of the Gramians in linear systems?
Main Contribution
As spectral expansions of states of bilinear systems are closely related to the corresponding expansions of states of linear systems, in
Section 2, we first consider the concepts of modal controllability and observability for a linear dynamical system. The following new results were obtained: Criteria for modal controllability and observability are proposed (Propositions 3 and 5), and a relation is established between the eigenmodes of the linear system and sub-Gramians of controllability and observability (Propositions 7 and 9).
The main theoretical results are presented in
Section 3. We show that the solution of a bilinear system under any control can be split uniquely into generalized modes corresponding to the eigenvalues of the dynamics matrix (Proposition 11). The definitions of sub-Gramians are proposed in a new form, and their relationship with the definitions in [
19] are clarified (Property 4). The conditions for the existence of sub-Gramians (Property 1) and their consistency with the concept of sub-Gramians in linear theory (Property 3) are established.
In [
19], expressions for sub-Gramians were proposed in the form of solutions to the modal Lyapunov equations. In this study, the same quantities are derived as the sums of squared convolution kernels arising in the Volterra series expansion of the state of the bilinear system. Moreover, it is proved (in Property 4) that if these quantities exist, then for a stable matrix of dynamics, they coincide with the definition in [
19]. Although the new definition of sub-Gramians essentially coincides with the definition in [
19], it allows us to establish a relation between sub-Gramians and the corresponding generalized modes of a bilinear system, namely, to prove that sub-Gramians characterize some measure of the corresponding generalized eigenmodes and their pairwise scalar products (Proposition 5) under the condition that controls are small enough. From a theoretical point of view, this result provides a conceptual justification for the concept of sub-Gramians for bilinear systems. From the point of view of applications, it allows one to make energy-based estimates of individual generalized modes and their pairwise interactions in the system. Such estimates, in turn, can become the basis for stability analysis and optimal control in bilinear dynamical systems.
Section 4 proposes an iterative algorithm for computing the Gramians and sub-Gramians based on the element-wise computation of the solution matrix on an eigenvector basis. This algorithm is similar to the algorithms in [
20]. However, based on the proposed algorithm, a novel criterion for the existence of solutions to the generalized Lyapunov equation is formulated (Theorem 4), which, in some cases, allows the expansion of the domain of guaranteed existence of a solution of bilinear equations. At the end of
Section 4, some examples that illustrate the application and practical use of the considered spectral decompositions are presented.
2. Spectral Expansions of Gramians of Linear Systems
2.1. Eigenmode Decompositions of the Dynamics of a Linear System
In this section, we consider the eigen-decomposition of the dynamics of a linear stationary system, which will be required for further presentation. Consider a linear dynamical system of the form
where
is the state vector, and
are the output signal and control, respectively.
are real matrices. Suppose that the dynamics matrix
A has a simple spectrum
.
Proposition 1. A matrix A with a simple spectrum can be represented aswhereare the matrices of residues in the decomposition of the resolvent of matrix A: Proof. When all eigenvalues are distinct, the residue matrices of the resolvent of matrix
A can be calculated using the normalized right and left eigenvectors as
(see [
21]). Then, representation (
2) directly follows from the eigen decomposition of matrix
A. □
From the representation of the residue matrices through the eigenvectors and the orthogonality of the eigenvectors, it follows that the residue matrices
satisfy the following the orthogonality property:
where
is the Kronecker delta. Thus, representation (
2) of matrix
A is
in the sense that all terms in it are orthogonal to each other in accordance with (
4). If the matrices
of residues are known, then using (
2)–(
4), one can easily find all the powers of the matrix
A
and the summation index here and in the following are assumed to be from one to
n. Substituting (
5) into the Taylor expansion of the matrix exponent of
A, we obtain
Proposition 2 (Eigenmode decomposition).
Solution, control, and output signal of linear system (1) are separable with respect to the eigenmodes, i.e., there is a representation is the initial position of the system, and denotes the Moore–Penrose inverse. The system (1) splits into separate subsystems Recall that the Moore–Penrose inverse matrix exists and is unique for any complex or real matrix B and it is defined by four conditions: (i) , (ii) , (iii) is Hermitian, and (iv) is Hermitian.
Proof. The expression (
7) for
is obtained by multiplying the solution to (
1):
on the left by
, taking into account property (
4) and also that
. If we differentiate (
7), we obtain (
8). □
The expression (
7) for
determines the dynamics of the
eigenmode corresponding to the eigenvalue
in system (
1). The corresponding mode in the output signal is determined by the expression
.
2.2. Modal Observability and Controllability of a Linear System
In this section, by analogy with the classical definitions of an observable and controllable linear system, we introduce the corresponding concepts for individual eigenmodes. We also establish simple criteria for modal controllability and observability for a linear stationary system (
1).
Definition 1. The mode corresponding to the eigenvalue isobservablein the linear system (1) at the moment , when at if, and only if, . According to (
7), the observability of a mode in a stationary system (
1) is entirely determined by the matrices
and
C. Therefore, we can also discuss the
modal observability of a pair . For stationary systems, modal observability can be verified using the following simple criterion.
Proposition 3. The mode corresponding to in the linear system (1) is observable. if, and only if, . Proof. If the stationary pair is modally observable, then holds for any , that is, for some , is fulfilled, and therefore . If , then there is some such that . Let us now choose an arbitrary . It is easy to show that the vectors and are both eigenvectors of matrix A corresponding to the eigenvalue . Because, by assumption, the spectrum of is simple, these vectors are proportional, that is, . Therefore, , that is, the pair is modally observable. □
One can check the observability of the system by checking the observability of its individual modes.
Proposition 4. The stationary system (1) is observable (identifiable) if, and only if, each mode is observable (identifiable). Proof. It follows from the definitions and equivalence of the following statements
However, individual modes can be observable when the dynamical system (
1) as a whole is unobservable.
Similarly, one can consider the concept of modal controllability and obtain a criterion for modal controllability.
Definition 2. The mode corresponding to the eigenvalue in the linear system (1)is controllable, if for each event , there is a control , which brings the system to the zero state in a finite time. For stationary systems, modal controllability can be verified using the following simple criterion.
Proposition 5. The mode corresponding to in the linear system (1) is controllable if, and only if, . Proof. If
, then it follows from (
7) that mode
is not controllable. If
, then
can always be chosen, such that
Then, in a finite time T, the control brings the system from state to the zero state, i.e., the eigen-mode corresponding to is controllable. □
According to Proposition 5, the controllability of a mode in a stationary system is entirely determined by the matrices and B. Thus, we can discuss the modal controllability of the stationary pair. The controllability of the system can be verified by checking the controllability of its individual modes.
Proposition 6. A stationary linear system (1) is controllable if, and only if, each mode is controllable. Proof. If the system (
1) is controllable, then each of its modes, by definition, is also controllable. Consider a system in which each mode can be controlled. Let at the moment
, it is in the state
. Let us choose modal control in the form
where the set of scalar functions
satisfies the condition
As functions
, for example, one can always choose piecewise constant functions on
n sections of the interval
. Substituting the control
from (
9) and (
10) into the solution to (
1),
we obtain
Because all eigenvalues
are simple, the vectors
and
coincide up to a scalar factor with the corresponding right eigenvector of the system. In addition, according to Proposition 5,
for all
i. Therefore, it is always possible to choose vectors
, such that
in (
11). Thus, system (
1) is controllable. □
The choice of the control
in the form (
9–
10) also proves the following property:
Corollary 1. If an individual mode of system (1) is controllable, then there is a control that allows one to change this eigenmode arbitrarily on any finite interval without changing other eigenmodes of the solution. Note that individual modes can be controllable even when the dynamical system as a whole is uncontrollable.
2.3. Spectral Decompositions of Gramians of a Linear System
In this section, we recall the basic facts about the observability and controllability Gramians of the linear system (
1) and their spectral expansions, and also offer a meaningful interpretation of the corresponding spectral components in these expansions.
The Gramians of controllability and observability of a stable linear system (
1) are, respectively, the quantities
which are also solutions of the corresponding Lyapunov equations
If
is the initial state of system (
1), then the integral energy of the output signal at zero control is determined by the observability Gramian
If the state
is reachable, then the minimum energy for bringing the system from the zero state to
and the corresponding optimal control
are determined by the inverse matrix of the controllability Gramian
where
is the Moore–Penrose inverse.
In [
17], the spectral decompositions of Gramians (
12) were proposed. In [
18], they were generalized to a more general class of solutions of the matrix Krein equations. The eigenterms of the expansions are represented using the residues of the resolvent of the matrix
A. Let us formulate this result for Equation (
13) in the following form:
Theorem 1 ([
18]).
If for all , Then, for any matrices B and C, there is a unique solution of the Lyapunov Equation (13), and it is presented in the formwhere the spectral components for the controllability and observability Gramians, respectively, are given bywhere denotes the Hermitian part of the matrix, and and are the matrix residues (3) that correspond to the eigenvalues and . The eigenterms
and
in expressions (
16) are called in [
17]
the sub-Gramians and pairwise sub-Gramians, respectively. They characterize the contribution of the corresponding eigenmodes or their pairs to the energy variation of the system, determined by the corresponding Gramian over an infinite time interval. The following statement holds:
Proposition 7 (Interpretation of observability sub-Gramians).
For system (1) with zero control, the value is the cross-correlation between the output signal and its i-th modal component at a lag of zero. The value is the cross-correlation between the i-th and j-th modal components of the output signal at a lag of zero. Proof. Considering that
and
, we obtain
Similarly, we directly verify that . □
Similar to the Lyapunov Equation (
13) hold for Gramians, the corresponding
modal Lyapunov equations hold for sub-Gramians.
Proposition 8. Under the conditions of Theorem 1, the observability sub-Gramians and in expansions (16) and (18) satisfy the following modal Lyapunov equations: Proof. This is verified by the direct substitution of (
18) into (
19) and (
20). □
Similar statements are proved for controllability sub-Gramians.
Proposition 9 (Interpretation of controllability sub-Gramians).
For system (1) and reachable state , consider problem (15) of finding the required control with the minimum energy. Then, the value is the cross-correlation between the optimal control and its i-th modal component at a lag of zero. The value is the cross-correlation between the the i-th and j-th modal components of the optimal control at a lag of zero. Proposition 10. Under the conditions of Theorem 1, the controllability sub-Gramians and in (16) and (17) satisfy the following modal Lyapunov equations: 5. Discussion
In this study, we show that (i) the solution of a bilinear system can be split uniquely into generalized modes corresponding to the eigenvalues of the dynamics matrix, and (ii) the controllability and observability Gramians can be split into “sub-Gramians” that characterize the magnitude of these generalized modes and their pairwise interactions. This characterization, however, was proven only for small enough input control. A similar condition arises when establishing the relationship between the Gramians and the energy of states in the system in [
16] and, apparently, it is typical for bilinear systems.
In contrast to the spectral expansions of the instantaneous dynamics of a bilinear system in [
11,
12,
13], the spectral expansions of the
-norms of states and signals considered in this paper can be useful for analyzing the non-linear effects associated with the accumulation of the influence of disturbances over time. Therefore, the practical significance of the obtained results is that they allow the characterization of the contribution of generalized modes or their pairwise combinations to the asymptotic dynamics of the integrated perturbation energy in bilinear systems. In particular, the norm of the obtained sub-Gramians increases when the frequencies of the corresponding oscillating modes approximate each other. Thus, the proposed decompositions may provide a new fundamental approach for quantifying resonant modal interactions in bilinear systems.
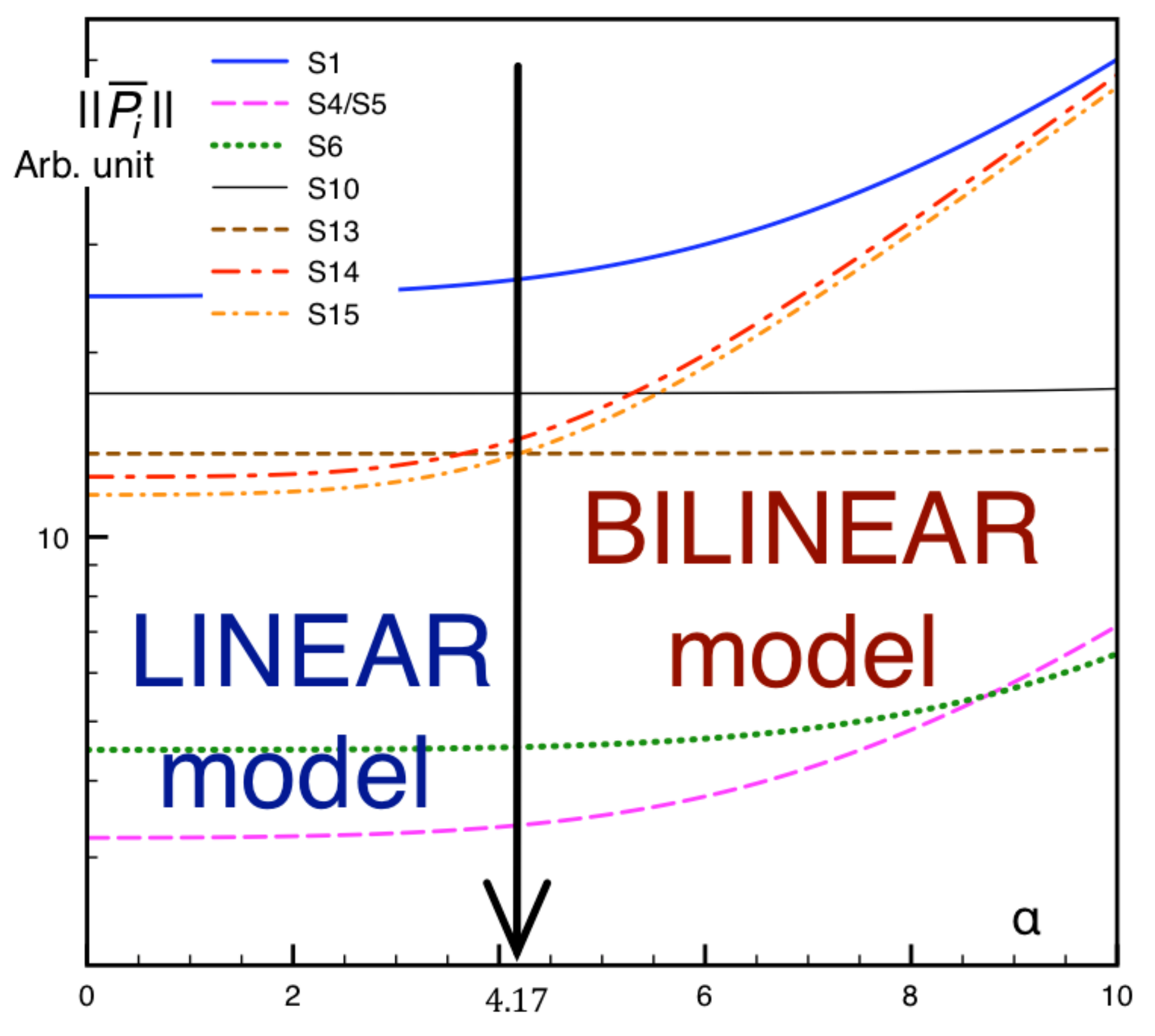
When the bilinear effects decrease, the proposed expansions allow a smooth transition to the linear case (see Property 3). This property can be useful in determining the range of applicability of a linear model and identifying generalized eigenmodes that are sensitive to bilinear effects and require “non-linear refinement” of their dynamics. It can be expected that in some large systems, there will be only a few such modes. Therefore, a non-linear examination of their dynamics will not take much time when real-time state estimation is required. The first test experiment with a bilinear model of an electric power system in [
20] showed that the proposed spectral decompositions allow one to determine the range of applicability of linear model in general and to reveal particular generalized eigenmodes that sensitive to bilinear effects.
Although this study focuses on continuous bilinear systems, the results obtained can be extended to different classes of systems. First, they can be extended to discrete dynamical systems. In the linear case, this was partially performed in [
18]. Meanwhile, the generalized Lyapunov equations that we consider for deterministic bilinear systems can be naturally associated with stochastic linear control systems (see [
8]). Therefore, the results of spectral decomposition of Gramians can immediately be carried over to this class of systems. In this case, the results must be interpreted in terms of probabilities. Finally, the equations considered in this study can describe a special class of linear parameter-varying systems that can be reformulated as bilinear dynamical systems [
9]. In this case, the interpretation of the spectral decompositions must include the effect of parameter variation.
It should be noted that the main object of research in this study is matrix Lyapunov equations, that is, matrix equations. An alternative approach is to apply the apparatus of linear matrix inequalities and semi-definite programming [
25]. Therefore, another possible area of research is the combination of these approaches. In terms of applications, the authors plan to apply the developed methods to study the stability of electric power systems using linear and non-linear graph models. Another emerging area is the analysis of the stability of neural networks, including the use of Lyapunov functions [
26,
27]. The dissipativity principle in the synchronization of neural networks is very similar to the synchronization of generators in power systems. Therefore, the application of the developed methods to the problem of synchronization of neural networks is another possible direction for future research.




{kind=link}
