
Distributed Mechanism for Detecting Average Consensus with Maximum-Degree Weights in Bipartite Regular Graphs



Abstract
:1. Introduction
1.1. Theoretical Insight into Wireless Sensor Networks
- □
- Communication device: used to transfer/to receive messages to/from other sensor nodes in the network.
- □
- Sensors/actuators: their goals are to sense physical quantities from the adjacent environment, to subsequently convert the sensed information into a digital value, and to affect the surroundings.
- □
- Controller: responsible for processing all the data and for controlling other architecture components.
- □
- Memory: employed as data storage.
- □
- Energy source: supplies other components with electric power.
1.2. Data Aggregation in Wireless Sensor Networks
- □
- □
- Compressing step: in this phase, a central node removes data redundancy caused by high data correlation from the collected data and integrates the raw data into a more applicable summary form.
- □
- Broadcasting step: the integrated data are distributed among the sensor nodes in the network/clusters in this phase.
- □
- Gathering step: each sensor node broadcasts its local data to its neighbors, i.e., the nodes situated in its transmission range.
- □
- Compressing step: in contrast to the previous schemes, data compression and integration are executed locally at each sensor node in this phase.
1.3. Consensus Problem
1.4. Our Contribution
1.5. Paper Organization
- □
- Related Work (Section 2): this section is concerned with the most recent and most relevant manuscripts from other authors addressing AC or a consensus problem in graphs that are either bipartite regular/bipartite/regular.
- □
- Theoretical Background (Section 3): this section is divided into two subsections, where the applied mathematical model of WSNs and AC are introduced.
- □
- Proposal of Mechanism for Detecting Whether Graphs Are Bipartite Regular (Section 4): in this section, which is formed by two subsections, we provide a spectral analysis of AC with MD weights over bipartite regular graphs, propose a novel distributed mechanism for detecting whether a graph representing WSN is bipartite regular or not, and explain how to reconfigure the algorithm after detection.
- □
- Experimental Section (Section 5): this section consists of two subsections, in which the applied research methodology is introduced, and the experimental results are provided and subsequently discussed. Moreover, it is experimentally identified how to optimally round the inner states for our mechanism.
- □
- Future Plans (Section 6): here, we reveal what our plans related to the proposed mechanism include.
- □
- Conclusions (Section 7): in this section, we briefly summarize the contribution presented in this article.
2. Related Work
3. Theoretical Background
- □
- Mathematical Model of Wireless Sensor Networks (Section 3.1): this subsection introduces the graphs of our interest in this article and the tools to describe a network/graph topology.
- □
- Definition of Average Consensus Algorithm with Maximum-degree Weights (Section 3.2): in this subsection, we provide the definition of AC, its convergence conditions, and the definition of MD weights.
3.1. Mathematical Model of Wireless Sensor Networks
3.2. Definition of Average Consensus Algorithm with Maximum-Degree Weights
4. Proposal of Mechanism for Detecting Whether Graphs Are Bipartite Regular
- □
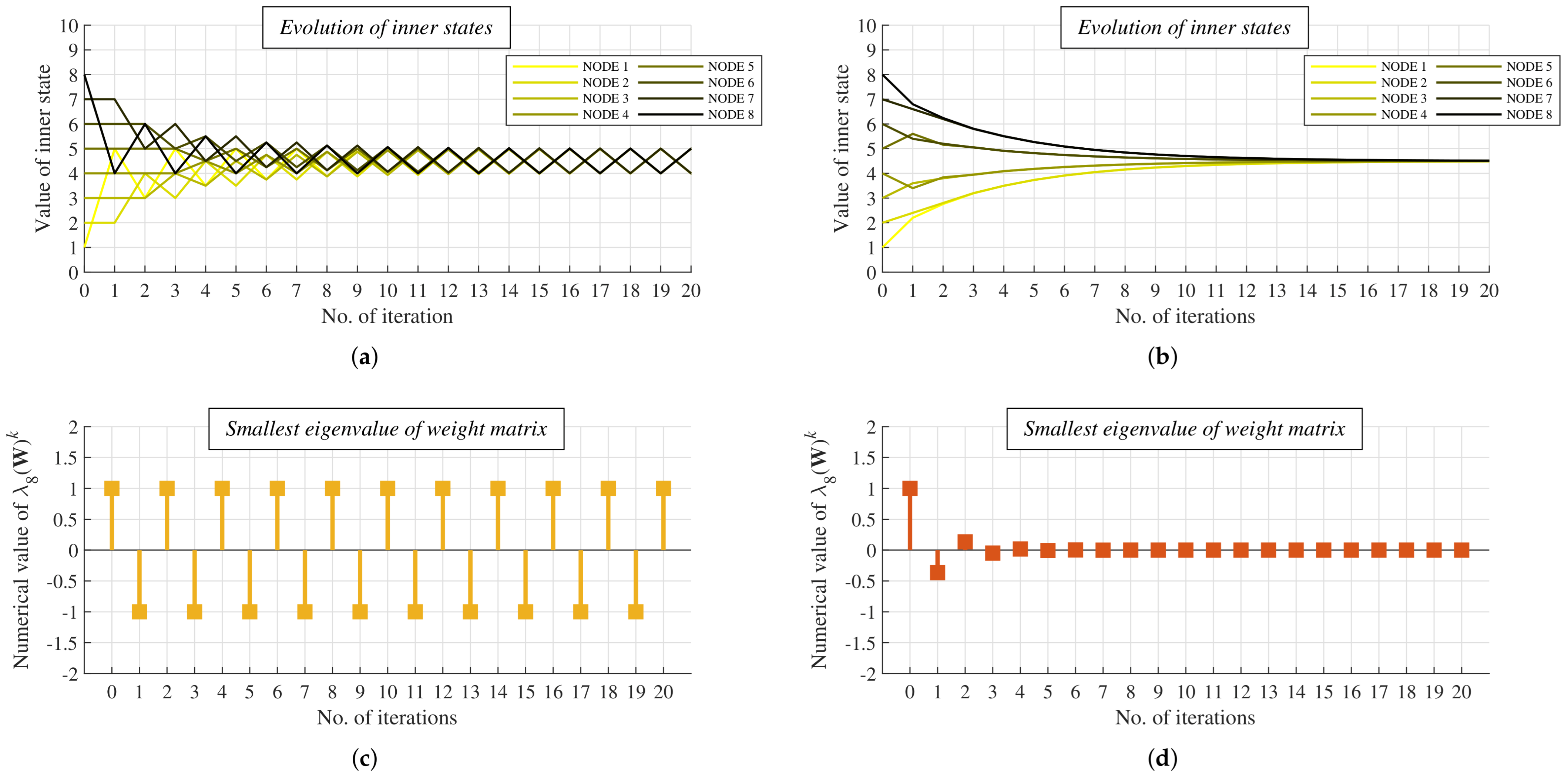
- Spectral Analysis of AC with MD weights in Bipartite Regular Graphs (Section 4.1): in this subsection, we analyze the spectrum of the adjacency matrix A(G), the Laplacian spectrum L(G), and the spectrum of the weight matrix W(G), provided AC with MD weights is executed in bipartite regular graphs. We identify in this subsection that only the largest eigenvalue ((W(G)) and the smallest eigenvalue ((W(G)) of the weight matrix W(G) are on the unit circle, causing that the inner states oscillate between two values close to the arithmetic means determined by the initial inner states from each disjoint set, and the sum of all the inner states is preserved at each iteration despite the divergence of the algorithm.
- □
- Proposed Mechanism for Detecting Bipartite Regular Graphs in Distributed Fashion (Section 4.2): in this subsection, we propose and present five conditions according to which a sensor node can classify whether or not a graph is bipartite regular. Moreover, it is identified in this subsection how to reconfigure the mixing parameter so that the algorithm converges to the arithmetic mean in bipartite regular graphs after reconfiguration.
4.1. Spectral Analysis of AC with MD Weights in Bipartite Regular Graphs
4.2. Proposed Mechanism for Detecting Bipartite Regular Graphs in Distributed Fashion
- □
- No. 1: the detection is only made according to the difference in inner states of a sensor node whereby no further information (compared to default AC) has to be transmitted. Thus, our proposal is efficient in terms of energy consumption, which is significantly beneficial in energy-constrained technologies such as WSNs. Each node only stores the values of the inner states from previous iterations, based on which it can detect whether or not a graph is bipartite regular.
- □
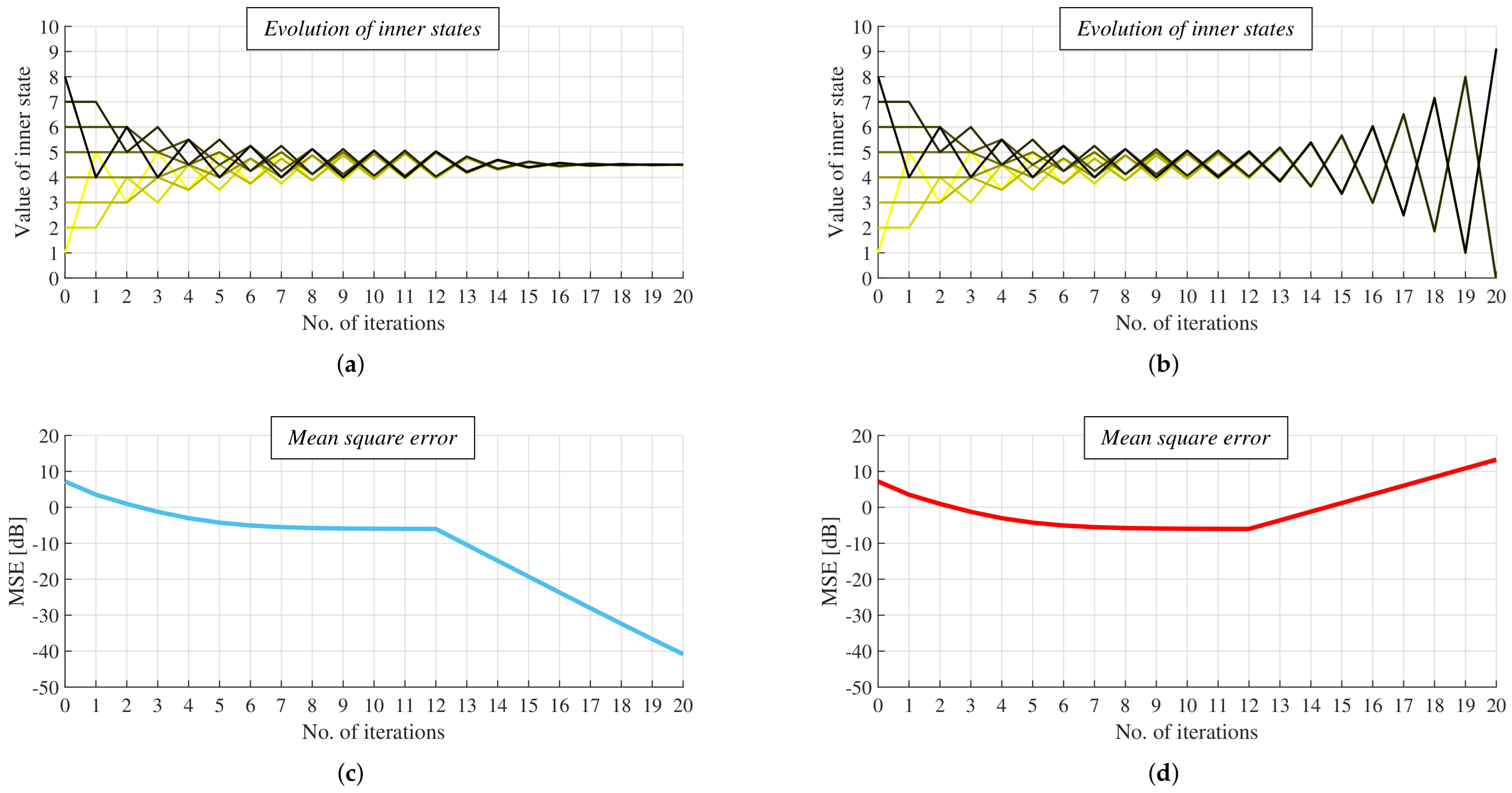
- No. 2: as identified in Section 4.1, the sum of all the inner states is preserved although the algorithm diverges. This fact ensures that the inner states can begin to converge to the arithmetic mean (the mean square error (MSE) of the inner states converges to zero) once the detection is completed. Thus, the algorithm does not have to start once again but continues in its execution after reconfiguration.
- □
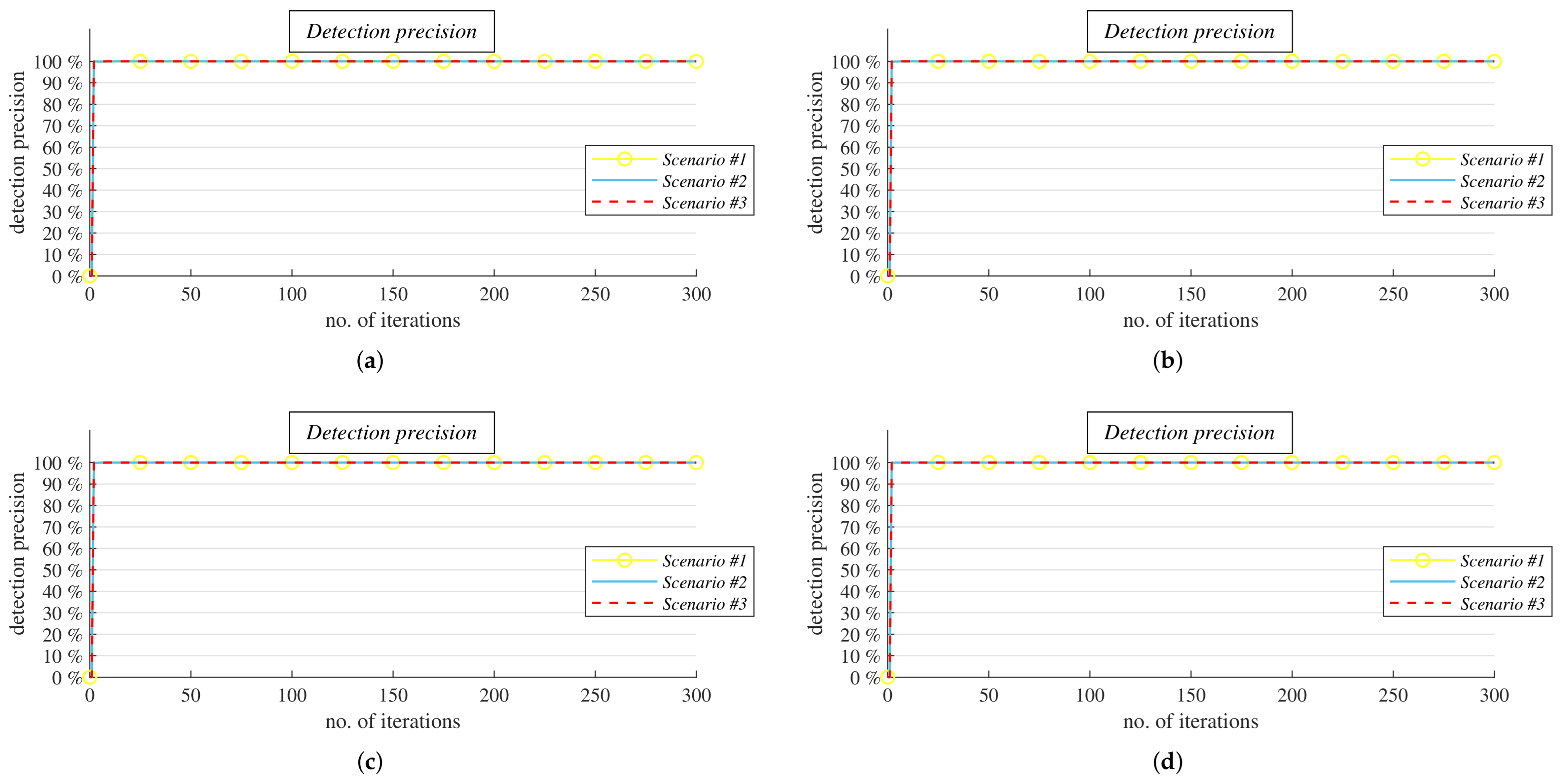
- No. 3: the application of our mechanism guarantees a very high detection precision (as shown later in this article) in a short time despite its computational ease.
- □
- No. 4: it can be applied not only for AC with MD weights but also for the generalized Metropolis–Hastings algorithm with the mixing parameter = 0 (as their weight matrices are identical [38]). We do not pay further attention to this algorithm in this article due to the limited range of the study. However, analyzing this algorithm is included in our plans.
| Algorithm 1 AC with MD weights—proposed mechanism is applied |
Input: x(0)
Output: x(k) ≈1 |
5. Experimental Section
- □
- Applied Research Methodology (Section 5.1): in this subsection, we introduce the applied research methodology (i.e., specification of the executed experiments, the used graph types, the analyzed scenarios, and how the initial inner states are generated) and the metrics applied to evaluate the performance of our mechanism.
- □
- Experiments and Discussion (Section 5.2): this part consists of three sets of figures (22 figures overall) demonstrating how precisely our mechanism can detect whether or not AC with MD weights is executed over a graph that is bipartite regular and how MSE of the inner states evolves when our mechanism is applied. Subsequently, a discussion about observable phenomena is provided.
5.1. Applied Research Methodology
- □
- d = {2, 3, 4, 5, 6, 7, 10, 15}
- □
- p = {5%, 10%, 15%, 20%}
- □
- Scenario 1: the inner states exploited by the proposed mechanism are rounded to decimals.
- □
- Scenario 2: the inner states exploited by the proposed mechanism are rounded to hundreds.
- □
- Scenario 3: the inner states exploited by the proposed mechanism are rounded to thousands.
- □
- Analysis I. (see Figure 15): in this part, we test how precisely our mechanism can detect that AC with MD weights is executed over bipartite regular graphs. To evaluate the performance of the proposed mechanism, we analyzed how many sensor nodes correctly detect (at each iteration) that a graph is bipartite regular (an incorrect detection means that the mechanism detects that the graph is not bipartite regular in this case). The detection precision is expressed as the ratio: the correct detections in the whole network at an iteration/all the executed detections in the whole network at the same iteration, and this precision is expressed in percentages. In the figures shown below, we only depict the precision averaged over 100 graphs for each d.
- □
- Analysis II. (see Figure 16 and Figure 17): the second part is concerned with how precisely the mechanism that detects that AC with MD weights is executed over graphs that are not bipartite regular. The performance is just like in the previous analysis evaluated by applying the ratio: the correct detections in the whole network at an iteration/all the detections in the whole network at the same iteration—expressed in the percentages again. However, in this case, a correct detection means that our mechanism classifies that a graph is not bipartite regular. In this part, AC with MD weights was evaluated over both RGs and RGGs, as mentioned above. Like in Analysis I., we only depict the detection precision averaged over 100 graphs for each p and each connectivity of RGGs, respectively.
- □
- Analysis III. (see Figure 18): the last analysis provided in this article is focused on MSE-based analysis, i.e., we examined how MSE evolves when our mechanism is applied. The mixing parameter is reconfigured to the value equaling 0.9 immediately after all the sensor nodes detect that a graph is bipartite regular. The goal of this analysis was to demonstrate that AC with MD weights can converge in bipartite regular graphs when our proposed mechanism is applied and to identify in which scenario high performance of the algorithm is achieved (thus, we found out how to round the inner states optimally). To quantify the deviation of the inner states from the arithmetic mean, we applied MSE over iterations defined as follows [65]:Again, averaged MSE over 100 graphs for each d is only depicted in the figures.
5.2. Experiments and Discussion
6. Future Plans
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AC | Average consensus algorithm |
| MD | Maximum degree |
| MSE | Mean square error |
| QoS | Quality of service |
| RGs | Random graphs |
| RGGs | Random geometric graphs |
| WSN | Wireless sensor network |
References
- Tudose, D.; Gheorghe, L.; Tapus, N. Radio transceiver consumption modeling for multi-hop wireless sensor networks. Univ. Politeh. Buchar. Ser. C 2013, 75, 17–26. [Google Scholar]
- Sattar, M.A.; Ali, M.A. A Survey on Harnessing Renewable Energy Sources to Power Wireless Sensor Networks for Agriculture. Int. J. Innov. Res. Comput. Commun. Eng. 2017, 5, 458–471. [Google Scholar]
- Al-Karaki, A.; Kamal, A.E. Routing Techniques in Wireless Sensor networks: A Survey. Secur. Netw. 2004, 11, 6–28. [Google Scholar] [CrossRef] [Green Version]
- Anastasi, G.; Conti, M.; Di Francesco, M.; Passarella, A. Energy conservation in wireless sensor networks: A survey. Ad Hoc Netw. 2009, 7, 537–568. [Google Scholar] [CrossRef]
- Kenyeres, M.; Kenyeres, J. Average Consensus over Mobile Wireless Sensor Networks: Weight Matrix Guaranteeing Convergence without Reconfiguration of Edge Weights. Sensors 2020, 20, 3677. [Google Scholar] [CrossRef]
- Dey, N.; Ashour, A.S.; Shi, F.; Fong, S.J.; Sherratt, R.S. Developing residential wireless sensor networks for ECG healthcare monitoring. IEEE Trans. Consum. Electron. 2017, 63, 3677. [Google Scholar] [CrossRef] [Green Version]
- Stamatescu, G.; Stamatescu, I.; Arghira, N.; Fagarasan, I. Data-driven modelling of smart building ventilation subsystem. J. Sens. 2019, 2019, 3572019. [Google Scholar] [CrossRef]
- Lieschnegg, M.; Fuchs, A.; Lechner, B.; Mariani, O. Autonomous sensor platform for environmental monitoring applications. Lect. Notes Electr. Eng. 2012, 146, 187–200. [Google Scholar]
- Lino, M.; Leao, E.; Soares, A.; Montez, C.; Vasques, F.; Moraes, R. Dynamic Reconfiguration of Cluster-Tree Wireless Sensor Networks to Handle Communication Overloads in Disaster-Related Situations. Sensors 2020, 20, 4707. [Google Scholar] [CrossRef]
- Buzura, S.; Iancu, B.; Dadarlat, V.; Peculea, A.; Cebuc, E. Optimizations for Energy Efficiency in Software-Defined Wireless Sensor Networks. Sensors 2020, 20, 4779. [Google Scholar] [CrossRef]
- Mahmood, M.A.; Seah, W.K.G.; Welch, I. Reliability in wireless sensor networks: A survey and challenges ahead. Comput. Netw. 2015, 79, 166–187. [Google Scholar] [CrossRef]
- Zade, N.D.; Deshpande, S.; Iyer, R.K. A review on object tracking wireless sensor network an approach for smart surveillance. In Proceedings of the International Conference On Computational Vision and Bio Inspired Computing, Coimbatore, India, 25–27 November 2018; pp. 909–921. [Google Scholar]
- Popescu, D.; Stoican, F.; Stamatescu, G.; Ichim, L.; Dragana, C. Advanced UAV–WSN system for intelligent monitoring in precision agriculture. Sensors 2020, 20, 817. [Google Scholar] [CrossRef] [Green Version]
- Ordaz-García, O.O.; Ortiz-López, M.; Quiles-Latorre, F.J.; Arceo-Olague, J.G.; Solís-Robles, R.; Bellido-Outeiriño, F.J. DALI Bridge FPGA-Based Implementation in a Wireless Sensor Node for IoT Street Lighting Applications. Electronics 2020, 9, 1803. [Google Scholar] [CrossRef]
- Muduli, L.; Mishra, D.P.; Jana, P.K. Application of wireless sensor network for environmental monitoring in underground coal mines: A systematic review. J. Netw. Comput. Appl. 2018, 106, 48–67. [Google Scholar] [CrossRef]
- Izadi, D.; Abawajy, J.H.; Ghanavati, S.; Herawan, T. A data fusion method in wireless sensor networks. Sensors 2015, 15, 2964–2979. [Google Scholar] [CrossRef]
- Castanedo, F. A review of data fusion techniques. Sci. World J. 2013, 13, 704504. [Google Scholar] [CrossRef]
- Wen, T. Data Aggregation; Morgan Kaufmann Publishers, Inc.: San Francisco, CA, USA, 1997. [Google Scholar]
- Pourghebleh, B.; Navimipour, N.J. Data aggregation mechanisms in the Internet of things: A systematic review of the literature and recommendations for future research. J. Netw. Comput. Appl. 2017, 97, 23–34. [Google Scholar] [CrossRef]
- Waldo, J.; Lin, H.; Millett, L.I. Engaging Privacy and Information Technology in a Digital Age; National Academies Press: Washington, DC, USA, 2007. [Google Scholar]
- Gordon, S. Costs of adjustment, the aggregation problem and investment. Syst. Control. Lett. 1992, 74, 422–429. [Google Scholar] [CrossRef]
- Xiao, L.; Boyd, S.; Lall, S. A Scheme for robust distributed sensor fusion based on average consensus. In Proceedings of the International Symposium on Information Processing in Sensor Networks, Los Angeles, CA, USA, 25–27 April 2005; pp. 63–70. [Google Scholar]
- Gao, Q.; Zuo, Y.; Zhang, J.; Peng, X.-H. Improving energy efficiency in a wireless sensor network by combining cooperative MIMO with data aggregation. IEEE Trans. Veh. Technol. 2010, 59, 3956–3965. [Google Scholar] [CrossRef] [Green Version]
- Xiao, S.; Huang, J.; Pan, L.; Cheng, Y.; Liu, J. On centralized and distributed algorithms for minimizing data aggregation time in duty-cycled wireless sensor networks. Wirel. Netw. 2013, 20, 1729–1741. [Google Scholar] [CrossRef]
- Merezeanu, D.; Nicolae, M. Consensus control of discrete-time multi-agent systems. Univ. Politeh. Buchar. Ser. A 2017, 79, 167–174. [Google Scholar]
- Antal, C.; Cioara, T.; Anghel, I.; Antal, M.; Salomie, I. Distributed Ledger Technology Review and Decentralized Applications Development Guidelines. Future Internet 2021, 13, 62. [Google Scholar] [CrossRef]
- Merezeanu, D.; Vasilescu, G.; Dobrescu, R. Context-aware control platform for sensor network integration. Stud. Inform. Control 2016, 25, 489–498. [Google Scholar] [CrossRef]
- Vladyko, A.; Khakimov, A.; Muthanna, A.; Ateya, A.A.; Koucheryavy, A. Distributed Edge Computing to Assist Ultra-Low-Latency VANET Applications. Future Internet 2019, 11, 128. [Google Scholar] [CrossRef] [Green Version]
- Mustafa, A.; Islam, M.N.U.; Ahmed, S. Dynamic Spectrum Sensing under Crash and Byzantine Failure Environments for Distributed Convergence in Cognitive Radio Networks. IEEE Access 2021, 11, 23153–23167. [Google Scholar] [CrossRef]
- Xiao, Y.; Zhang, N.; Lou, W.; Hou, Y.T. A Survey of Distributed Consensus Protocols for Blockchain Networks. IEEE Commun. Surv. Tutor. 2020, 22, 1432–1465. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Ren, W.; Yu, W.; Zhang, D. Fully distributed consensus control for a class of disturbed second-order multi-agent systems with directed networks. Automatica 2021, 132, 109816. [Google Scholar] [CrossRef]
- Barborak, M.; Malek, M.; Dahbura, A. The Consensus Problem in Fault-Tolerant Computing. ACM Comput. Surv. 1993, 25, 171–220. [Google Scholar] [CrossRef]
- Xiao, L.; Boyd, S. Fast linear iterations for distributed averaging. Syst. Control. Lett. 2004, 53, 65–78. [Google Scholar] [CrossRef]
- Chen, C.; Zhu, S.; Guan, X.; Shen, X.S. Wireless Sensor Networks: Distributed Consensus Estimation; Springer International Publishing: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Chang, J.; Liu, F. A Byzantine Sensing Network Based on Majority-Consensus Data Aggregation Mechanism. Sensors 2021, 21, 248. [Google Scholar] [CrossRef] [PubMed]
- Guyeux, C.; Haddad, M.; Hakem, M.; Lagacherie, M. A Efficient distributed average consensus in wireless sensor networks. Comput. Commun. 2020, 150, 115–121. [Google Scholar] [CrossRef]
- Muniraju, G.; Tepedelenlioglu, C.; Spanias, A. Analysis and Design of Robust Max Consensus for Wireless Sensor Networks. IEEE Trans. Signal Inf. Process. Netw. Signal 2019, 5, 779–791. [Google Scholar] [CrossRef] [Green Version]
- Schwarz, V.; Hannak, G.; Matz, G. On the convergence of average consensus with generalized Metropolis-Hasting weights. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing, Florence, Italy, 4–9 May 2014; pp. 5442–5446. [Google Scholar]
- Kar, S.; Moura, J.M.F. Topology for global average consensus. In Proceedings of the 40th Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 29 October–1 November 2006; pp. 276–280. [Google Scholar]
- Li, T.; Fu, M.; Xie, L.; Zhang, J.-F. Distributed consensus with limited communication data rate. IEEE Trans. Autom. Control 2011, 56, 279–292. [Google Scholar] [CrossRef] [Green Version]
- Pandey, P.K.; Singh, R. Fast Average-consensus on Networks using Heterogeneous Diffusion. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 1–5. [Google Scholar] [CrossRef]
- Dhuli, S.; Atik, J.M. Analysis of Distributed Average Consensus Algorithms for Robust IoT networks. arXiv 2021, arXiv:2104.10407. [Google Scholar]
- Kibangou, A.Y.; Commault, C. Observability in connected strongly regular graphs and distance regular graphs. IEEE Trans. Control. Netw. Syst. 2014, 1, 360–369. [Google Scholar] [CrossRef]
- Kar, S.; Moura, J.M. Consensus based detection in sensor networks: Topology optimization under practical constraints. In Proceedings of the 1st International Workshop on Information Theory in Sensor Networks, Santa Fe, NM, USA, 18–20 June 2007; pp. 1–12. [Google Scholar]
- Yu, J.; Yu, J.; Zhang, P.; Yang, T.; Chen, X. A unified framework design for finite-time bipartite consensus of multi-agent systems. IEEE Access 2021, 9, 48971–48979. [Google Scholar] [CrossRef]
- Hu, J.; Zheng, W.X. Bipartite consensus for multi-agent systems on directed signed networks. In Proceedings of the IEEE Conference on Decision and Control, Firenze, Italy, 10–13 December 2013; pp. 3451–3456. [Google Scholar]
- Han, T.; Guan, Z.-H.; Xiao, B.; Yan, H. Bipartite Average Tracking for Multi-Agent Systems with Disturbances: Finite-Time and Fixed-Time Convergence. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 4393–4402. [Google Scholar] [CrossRef]
- Muniraju, G.; Tepedelenlioglu, C.; Spanias, A. Consensus Based Distributed Spectral Radius Estimation. IEEE Signal Process. Lett. 2020, 27, 1045–1049. [Google Scholar] [CrossRef]
- Mosquera, C.; Lopez-Valcarce, R.; Jayaweera, S.K. Step-size sequence design for distributed average consensus. IEEE Trans. Signal Process. 2010, 17, 169–172. [Google Scholar] [CrossRef]
- Ma, X.; Dong, L.; Wang, Y.; Li, Y.; Sun, M. AIRC: Attentive Implicit Relation Recommendation Incorporating Content Information for Bipartite Graphs. Mathematics 2020, 8, 2132. [Google Scholar] [CrossRef]
- Gao, W.; Aamir, M.; Iqbal, Z.; Ishaq, M.; Aslam, A. On Irregularity Measures of Some Dendrimers Structures. Mathematics 2019, 7, 271. [Google Scholar] [CrossRef] [Green Version]
- Li, D.; Hou, Y.; Wang, D. The Ihara zeta function of the complement of a semiregular bipartite graph. Discret. Math. 2021, 344, 112598. [Google Scholar] [CrossRef]
- Macua, S.V.; Leon, C.M.; Romero, J.S.; Pereira, S.S.; Zazo, J.; Page-Zamora, A.; Lopez-Valcarce, R.; Zazo, S. How to implement doubly-stochastic matrices for consensus-based distributed algorithms. In Proceedings of the IEEE Sensor Array and Multichannel Signal Processing Workshop, A Coruna, Spain, 22–25 June 2014; pp. 333–336. [Google Scholar]
- Olfati-Saber, R.; Fax, J.A.; Murray, R.M. Consensus and cooperation in networked multi-agent systems. Proc. IEEE 2007, 95, 215–233. [Google Scholar] [CrossRef] [Green Version]
- Schwarz, V.; Matz, G. Average consensus in wireless sensor networks: Will it blend? In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, BC, Canada, 26–31 May 2013; pp. 4584–4588. [Google Scholar]
- Stamatescu, G.; Stamatescu, I.; Popescu, D. Consensus-based data aggregation for wireless sensor networks. Control Eng. Appl. Inf. 2017, 19, 43–50. [Google Scholar]
- Khosravi, A.; Kavian, Y.S. Challenging issues of average consensus algorithms in wireless sensor networks. IET Wirel. Sens. Syst. 2016, 6, 60–66. [Google Scholar] [CrossRef]
- Chung, F.R.; Graham, F.C. Spectral Graph Theory; American Mathematical Society: Providence, RI, USA, 1996. [Google Scholar]
- Das, K.C. A characterization on graphs which achieve the upper bound for the largest Laplacian eigenvalue of graphs. Linear Algebra Appl. 2004, 376, 173–186. [Google Scholar] [CrossRef] [Green Version]
- Brouwer, A.E.; Haemers, W.H. Spectra of Graphs; Springer Science + Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Grone, R.; Johnson, C.R.; Sa, E.M.; Wolkowicz, H. Positive definite completions of partial Hermitian matrices. Linear Algebra Appl. 1984, 58, 109–124. [Google Scholar] [CrossRef] [Green Version]
- Lovasz, L. Eigenvalues of Graphs; Technical Report; Eotvos Lorand University: Budapest, Hungary, 2007. [Google Scholar]
- Boole, G.A. A Treatise on the Calculus of Finite Differences; Cambridge University Press: Cambridge, UK, 1872. [Google Scholar]
- Frieze, A.; Karonski, M. Introduction to Random Graphs; Cambridge University Press: Cambridge, UK, 2016. [Google Scholar]
- Skorpil, V.; Stastny, J. Back-propagation and k-means algorithms comparison. In Proceedings of the 2006 8th International Conference on Signal Processing, ICSP 2006, Guilin, China, 16–20 November 2006; pp. 374–378. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Paper | Primary Focus of Paper | Applied Graphs of Our Interest |
|---|---|---|
| [38] | Formulating the necessary and sufficient convergence conditions for MD weights and the generalized Metropolis–Hastings algorithm | Bipartite regular |
| [39] | Determining the lower bound for the Laplacian eigenvalues | Ramanujan non-bipartite |
| [40] | A proposal of an algorithm for finite bit-rate communication | Ramanujan |
| [41] | A proposal of a diffusion-based communication protocol for improving the convergence rate of AC | Bipartite regular |
| [5] | A proposal of an algorithm for simplifying AC over mobile systems | Bipartite regular Bipartite regular components |
| [42] | An analysis of consensus algorithms | Triangular regular |
| [43] | Addressing the observability issue in a consensus network | Strongly regular Distance regular |
| [44] | An analysis of AC, discovering the Magic Number | Regular Irregular |
| [45] | An analysis of the finite-time bipartite consensus problem; a proposal of a new weighted signed AC | Bipartite |
| [46] | An analysis of the bipartite consensus problem in multi-agent systems | Bipartite |
| [47] | An analysis of the impact of disturbances on bipartite averaging tracking, a proposal of an algorithm to reach the finite-time bipartite averaging tracking | Bipartite |
| [48] | A proposal of a distributed algorithm for determining a spectral radius | Bipartite Non-bipartite Regular Irregular |
| Ours | A proposal of a distributed algorithm for detecting AC with MD weights in bipartite regular graphs, identifying how to reconfigure the mixing parameter | Bipartite regular |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kenyeres, M.; Kenyeres, J. Distributed Mechanism for Detecting Average Consensus with Maximum-Degree Weights in Bipartite Regular Graphs. Mathematics 2021, 9, 3020. https://doi.org/10.3390/math9233020
Kenyeres M, Kenyeres J. Distributed Mechanism for Detecting Average Consensus with Maximum-Degree Weights in Bipartite Regular Graphs. Mathematics. 2021; 9(23):3020. https://doi.org/10.3390/math9233020
Chicago/Turabian StyleKenyeres, Martin, and Jozef Kenyeres. 2021. "Distributed Mechanism for Detecting Average Consensus with Maximum-Degree Weights in Bipartite Regular Graphs" Mathematics 9, no. 23: 3020. https://doi.org/10.3390/math9233020
APA StyleKenyeres, M., & Kenyeres, J. (2021). Distributed Mechanism for Detecting Average Consensus with Maximum-Degree Weights in Bipartite Regular Graphs. Mathematics, 9(23), 3020. https://doi.org/10.3390/math9233020