3.1. Estimating Dynamic Factor Models Using Bayesian MCMC
In this section, we first introduce our method of implementing the unbalanced data into our model framework naturally. Then, we finish our model specification by assigning priors in Bayesian Framework. Finally, the MCMC procedure is discussed in detail.
As discussed in
Section 2, macroeconomic series are released with diverse lags in real time. Thus, a difficulty in real-time nowcasting is to deal with unbalanced data. In this section, we develop a computational Bayesian MCMC approach that can tackle this issue naturally.
To deal with the missing data in
at the end of the sample, we introduce the
indicator matrix
by deleting the
ith row from the identity matrix
if
. For the example discussed in
Section 2, at the third releasing date
in month
T,
. Therefore, removing the fifth and sixth row of
gives us
Similarly, for the index set
, deleting the last four rows of
leads to
Then, we can simply rewrite as
To better derive the posterior distributions, we express the dynamic of
in Equation (
1) as:
where
,
is a
vector representing the
ith row of
,
, and the symbol ⊗ denotes the Kronecker product. Thus, for the
qth releasing date in month
T, the conditional density for
is
the conditional density of
is
and the conditional density of
is
for
. In this way, the unbalanced structure of the data is built into our model framework through this indicator matrix
.
Let denote all parameters to be estimated. Suppose we are at releasing date q in month T of quarter , our task is to use observations and to estimate parameters and latent factors , then conduct the nowcast for .
The joint posterior distribution
can be written as a product of individual conditionals,
where
,
,
, and
can be derived according to Equations (
7)–(
9), respectively.
is the prior distribution for the parameter set
.
We finish the model specification by assigning prior distributions in Bayesian framework. We set prior for
as
. The prior for
is defined as
. This prior on
, along with two restrictions we set in
Section 2 (
and
for
), satisfy the identification assumptions in Stock and Watson [
16]. The prior for
is defined as
, where
is a scalar and pre-specified to be
so that the expectation of
is
. The prior for
is the standard normal truncated at
, that is: for
where
and
are PDF and CDF for standard normal distribution. Then,
. The priors for the diagonal elements of
are defined as
for
, where
and
are scalars and pre-specified to be 2 and
, accordingly. Then,
. The prior for
is
. The prior for
is set to be
for
(
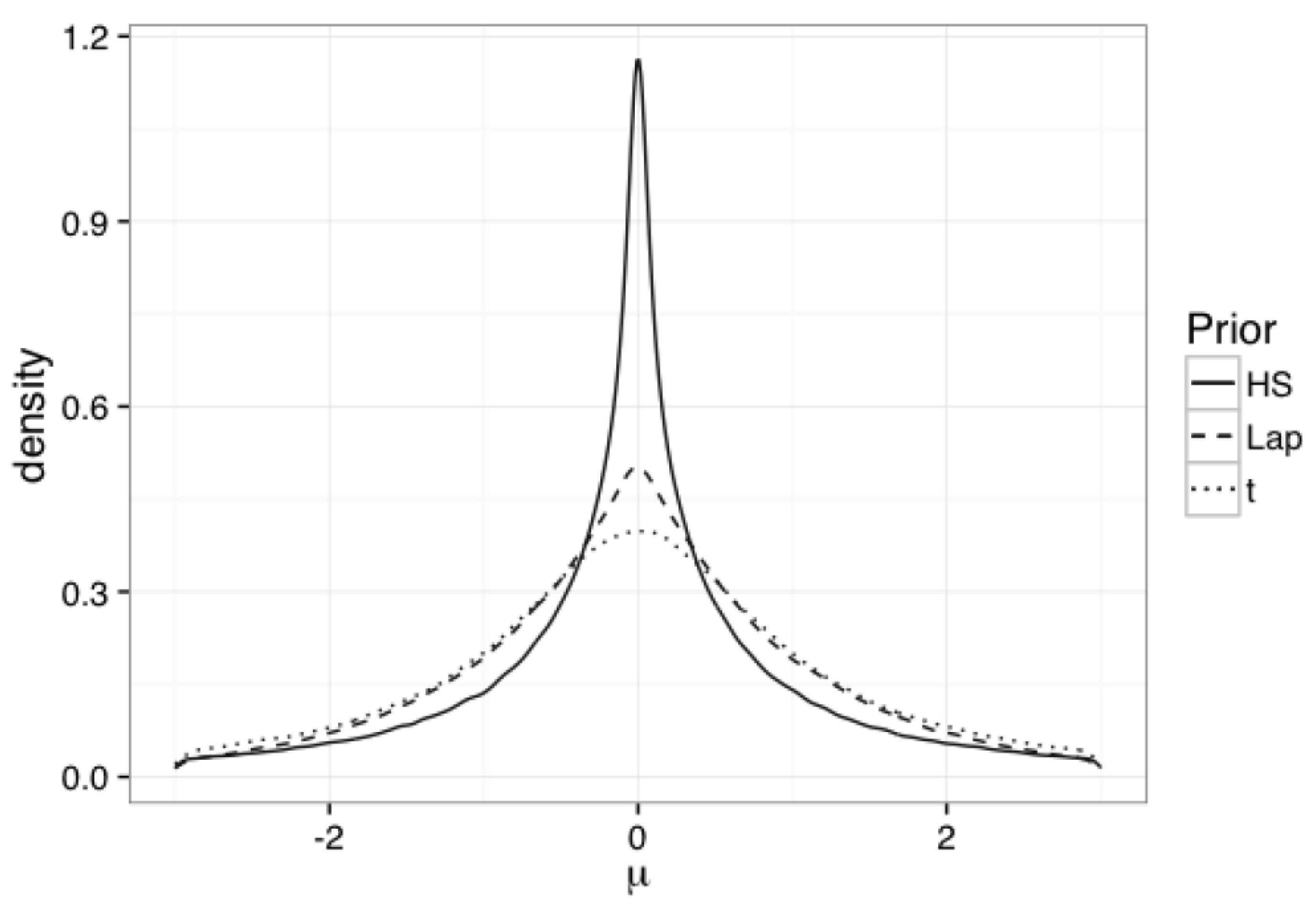
is set to be 1). As discussed in
Section 2.2, these prior specifications of
and
imply a horseshoe shrinkage on the coefficients
’s. The prior for
is
, where
and
are scalars and pre-specified to be 4 and
, accordingly, to provide a reasonable mean and variance of
.
All priors are assumed to be independent. Based on the derived complete conditional posterior distributions for each parameter and latent variable, we obtain posterior samples using Metropolis–Hastings within Gibbs sampling since some conditional posterior distributions do not have closed forms. In estimation, we use the means of posterior samples as estimates for parameters and latent factors. Complete conditional posterior distributions for all model parameters and latent factors are provided in
Appendix A.
3.2. Nowcasting Formulas
In this section, nowcasting formulas are provided. Suppose we are at
, the
qth (
) releasing date in month
T. As discussed in
Section 3.1, the available information are
and
, here
T can be the first (
), second (
), or third (
) month of the quarter
. Our goal is to nowcast GDP
. Let
,
,
(
),
,
,
, and
(
) be the
gth posterior draws for parameters and latent factors after the burn-in period, where
. We nowcast
using the following formulas.
When
, the nowcast of
using BAY is given by:
When
, the nowcast of
using BAY is given by:
When
, the nowcast of
using BAY is given by:
Note that for some releasing dates, if , meaning that no monthly series are available at releasing date , then posterior samples cannot be generated. As a solution, we use to replace in nowcasting equations. All of the parameter and factor estimations are updated in every single release within a month. Then, is re-produced for each release date.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}