
Mixed Mesh Finite Volume Method for 1D Hyperbolic Systems with Application to Plug-Flow Heat Exchangers


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Problem Formulation
1.2. Finite Volume Method
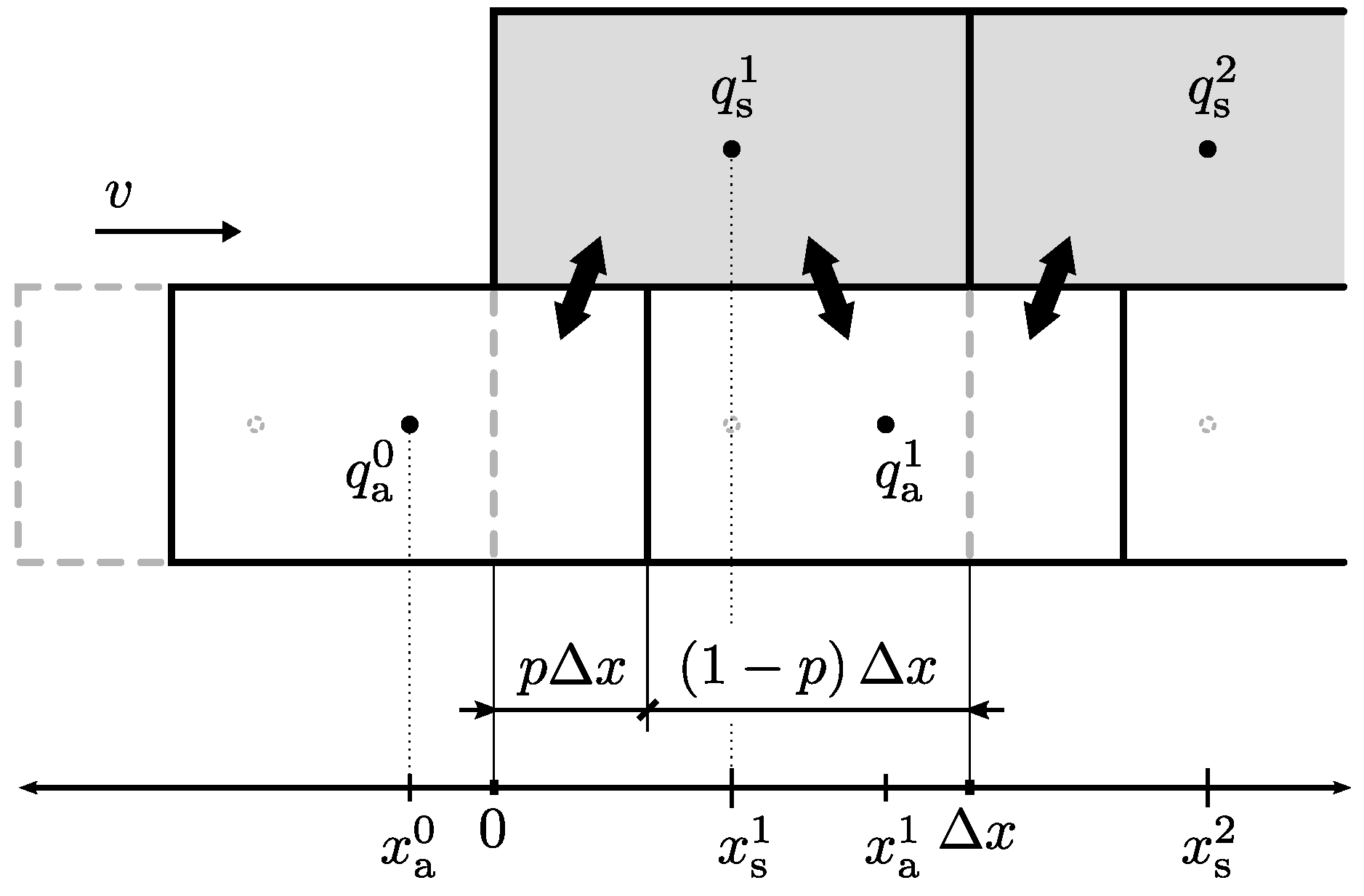
2. Mixed Mesh Finite Volume Method
Method Formulation
3. Application
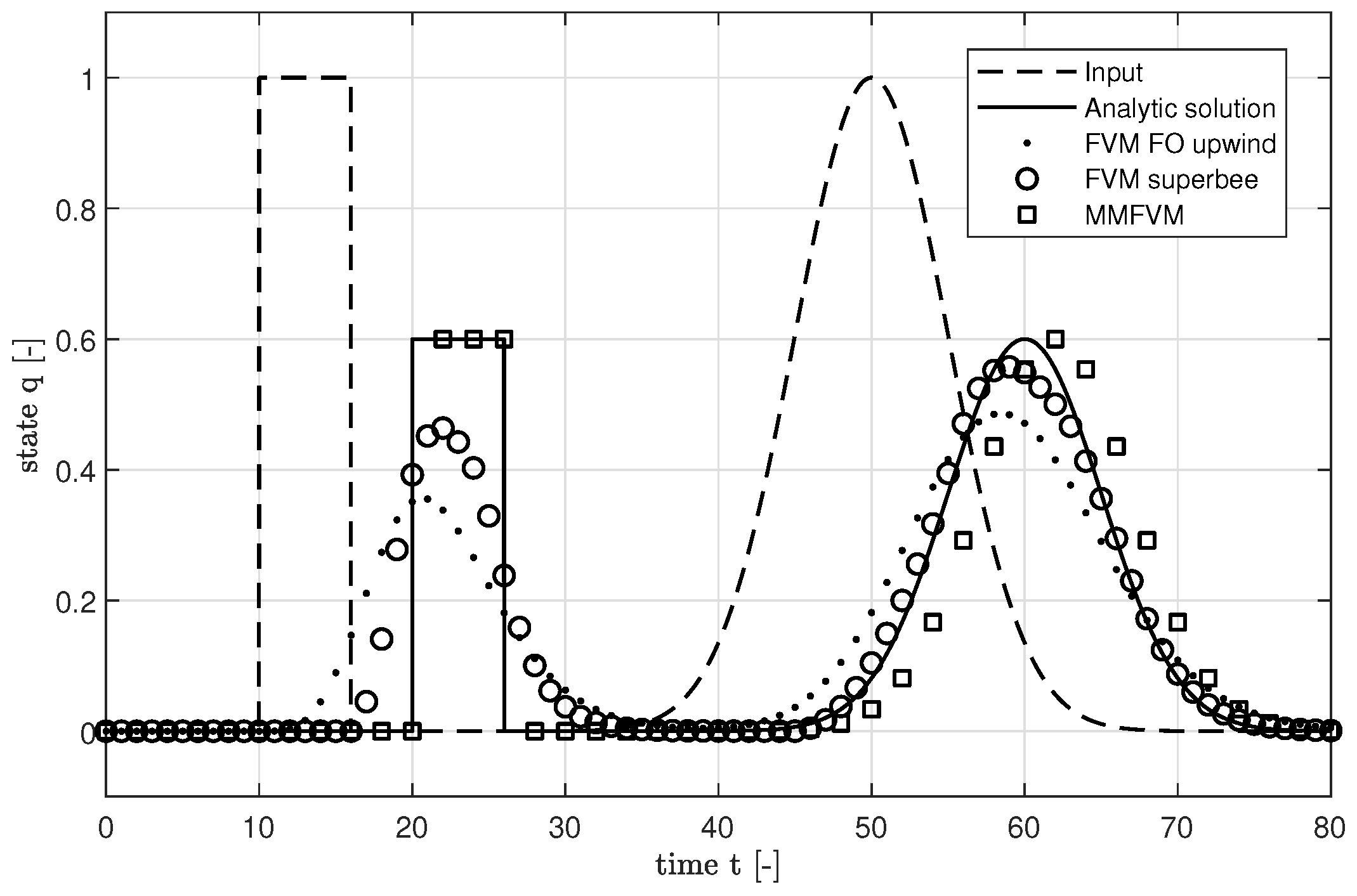
3.1. Advection-Decay Test
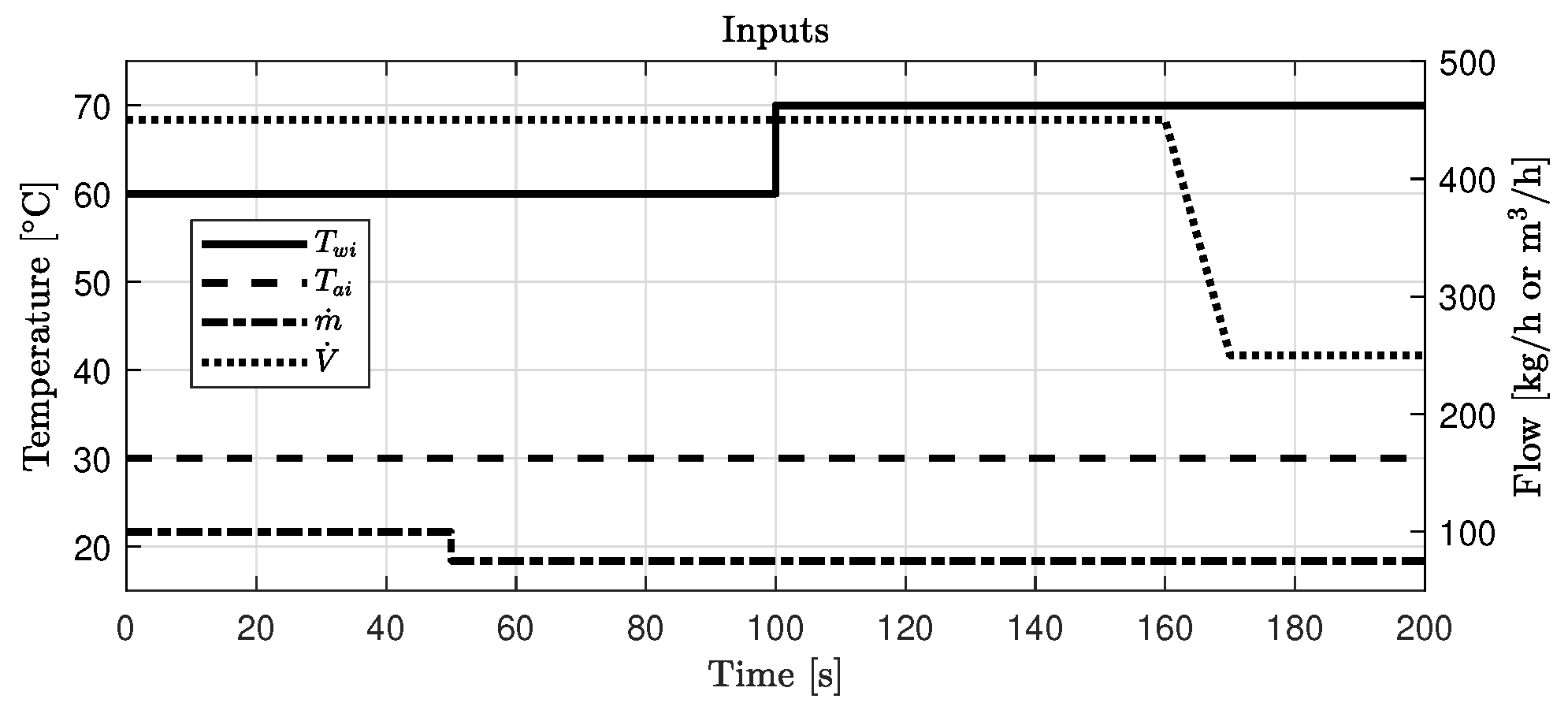
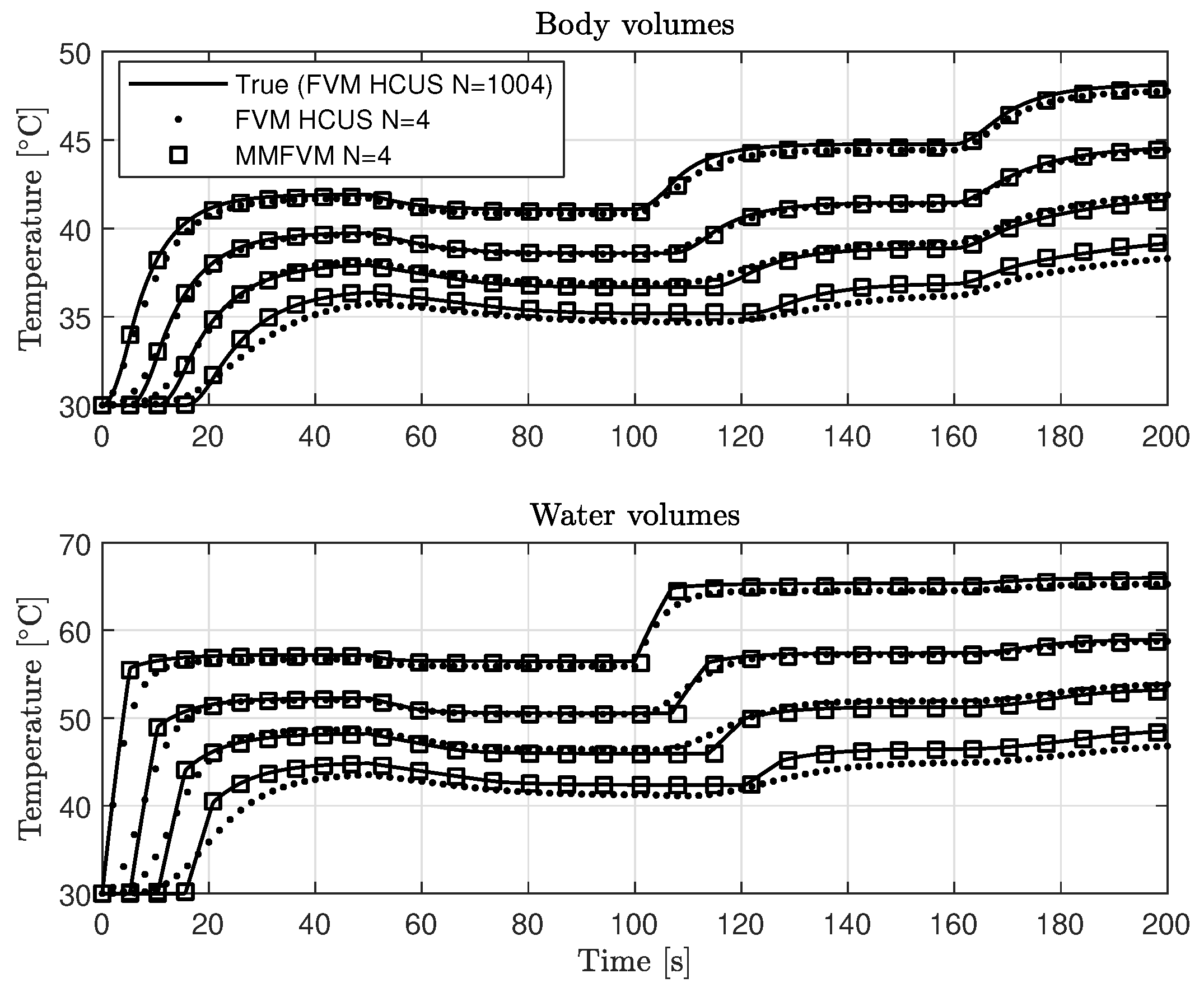
3.2. Water-to-Air Heat Exchanger Model
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Godlewski, E.; Raviart, P.A. Numerical Approximation of Hyperbolic Systems of Conservation Laws; Applied Mathematical Sciences 118; Springer: New York, NY, USA, 1996. [Google Scholar] [CrossRef]
- Godunov, S.K. A difference method for numerical calculation of discontinuous solutions of the equations of hydrodynamics. Mat. Sb. 1959, 89, 271–306. [Google Scholar]
- Van Leer, B. Towards the ultimate conservative difference scheme. V. A second-order sequel to Godunov’s method. J. Comput. Phys. 1979, 32, 101–136. [Google Scholar] [CrossRef]
- Harten, A. High resolution schemes for hyperbolic conservation laws. J. Comput. Phys. 1983, 49, 357–393. [Google Scholar] [CrossRef] [Green Version]
- Roe, P.L. Characteristic-based schemes for the Euler equations. Annu. Rev. Fluid Mech. 1986, 18, 337–365. [Google Scholar] [CrossRef]
- Sweby, P.K. High resolution schemes using flux limiters for hyperbolic conservation laws. SIAM J. Numer. Anal. 1984, 21, 995–1011. [Google Scholar] [CrossRef]
- Harten, A.; Engquist, B.; Osher, S.; Chakravarthy, S.R. Uniformly high order accurate essentially non-oscillatory schemes, III. J. Comput. Phys. 1987, 71, 231–303. [Google Scholar] [CrossRef]
- Shu, C.W.; Osher, S. Efficient implementation of essentially non-oscillatory shock-capturing schemes. J. Comput. Phys. 1988, 77, 439–471. [Google Scholar] [CrossRef] [Green Version]
- Shu, C.W.; Osher, S. Efficient implementation of essentially non-oscillatory shock-capturing schemes, II. J. Comput. Phys. 1989, 83, 32–78. [Google Scholar] [CrossRef]
- Liu, X.D.; Osher, S.; Chan, T. Weighted Essentially Non-oscillatory Schemes. J. Comput. Phys. 1994, 115, 200–212. [Google Scholar] [CrossRef] [Green Version]
- Jiang, G.S.; Shu, C.W. Efficient implementation of weighted ENO schemes. J. Comput. Phys. 1996, 126, 202–228. [Google Scholar] [CrossRef] [Green Version]
- Roe, P.L. Approximate Riemann solvers, parameter vectors, and difference schemes. J. Comput. Phys. 1981, 43, 357–372. [Google Scholar] [CrossRef]
- Toro, E.F.; Spruce, M.; Speares, W. Restoration of the contact surface in the HLL-Riemann solver. Shock Waves 1994, 4, 25–34. [Google Scholar] [CrossRef]
- Tang, T. Moving mesh methods for computational fluid dynamics. Contemp. Math. 2005, 383, 141–174. [Google Scholar] [CrossRef] [Green Version]
- Dumbser, M.; Zanotti, O.; Hidalgo, A.; Balsara, D.S. ADER-WENO finite volume schemes with space-time adaptive mesh refinement. J. Comput. Phys. 2013, 248, 257–286. [Google Scholar] [CrossRef] [Green Version]
- Buchmüller, P.; Dreher, J.; Helzel, C. Finite volume WENO methods for hyperbolic conservation laws on cartesian grids with adaptive mesh refinement. Appl. Math. Comput. 2016, 272, 460–478. [Google Scholar] [CrossRef]
- Dostal, J. MMFVM-HX-Model; GitHub: San Francisco, CA, USA, 2021. [Google Scholar] [CrossRef]
- Scott, A.; Socolofsky, G.H.J. CVEN 489-501: Special Topics in Mixing and Transport Processes in the Environment; Texas A&M University: College Station, TX, USA, 2005. [Google Scholar]
- Van Leer, B. Towards the ultimate conservative difference scheme. II. Monotonicity and conservation combined in a second-order scheme. J. Comput. Phys. 1974, 14, 361–370. [Google Scholar] [CrossRef]
- Wouwer, A.V.; Saucez, P.; Vilas, C. Simulation of ODE/PDE Models with MATLAB, OCTAVE and SCILAB; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar] [CrossRef]
- Versteeg, H.K.; Malalasekera, W. An Introduction to Computational Fluid Dynamics: The Finite Volume Method, 2nd ed.; Pearson Education Limited: London, UK, 2007. [Google Scholar]
- Courant, R.; Friedrichs, K.; Lewy, H. On the partial difference equations of mathematical physics. IBM J. Res. Dev. 1967, 11, 215–234. [Google Scholar] [CrossRef]
- Jakobsen, H.A. Chemical Reactor Modeling; Springer International Publishing: Cham, Switzerland, 2014. [Google Scholar] [CrossRef]
- Dullemond, C.P.; Johansen, A. Numerical methods and applications. In Lecture Hydrodynamics; Heidelberg University: Heidelberg, Germany, 2007. [Google Scholar]
- Dostál, J.; Havlena, V. Convection oriented heat exchanger model. In Proceedings of the 2016 12th IEEE International Conference on Control and Automation (ICCA), Kathmandu, Nepal, 1–3 June 2016; pp. 347–352. [Google Scholar] [CrossRef]
- Dostál, J.; Prajzner, V.; Havlena, V. Convection oriented heat exchanger model—Identification. In Proceedings of the CLIMA 2016—12th REHVA World Congress, Aalborg, Denmark, 22–25 May 2016; Heiselberg, P.K., Ed.; Aalborg University: Aalborg, Denmark, 2016; Volume 9, pp. 1–8. [Google Scholar]
- Shang, H.; Forbes, J.F.; Guay, M. Characteristics-based model predictive control of distributed parameter systems. In Proceedings of the 2002 American Control Conference, Anchorage, AK, USA, 8–10 May 2002; Volume 6, pp. 4383–4388. [Google Scholar] [CrossRef]
- Shang, H.; Forbes, J.F.; Guay, M. Model predictive control for quasilinear hyperbolic distributed parameter systems. Ind. Eng. Chem. Res. 2004, 43, 2140–2149. [Google Scholar] [CrossRef]
- Bogacki, P.; Shampine, L.F. A 3(2) pair of Runge - Kutta formulas. Appl. Math. Lett. 1989, 2, 321–325. [Google Scholar] [CrossRef] [Green Version]
- Shampine, L.F.; Thompson, S. Event location for ordinary differential equations. Comput. Math. Appl. 2000, 39, 43–54. [Google Scholar] [CrossRef] [Green Version]
- Waterson, N.P.; Deconinck, H. A unified approach to the design and application of bounded higher-order convection schemes. Numer. Methods Laminar Turbul. Flow 1995, 9, 203–214. [Google Scholar]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dostál, J.; Havlena, V. Mixed Mesh Finite Volume Method for 1D Hyperbolic Systems with Application to Plug-Flow Heat Exchangers. Mathematics 2021, 9, 2609. https://doi.org/10.3390/math9202609
Dostál J, Havlena V. Mixed Mesh Finite Volume Method for 1D Hyperbolic Systems with Application to Plug-Flow Heat Exchangers. Mathematics. 2021; 9(20):2609. https://doi.org/10.3390/math9202609
Chicago/Turabian StyleDostál, Jiří, and Vladimír Havlena. 2021. "Mixed Mesh Finite Volume Method for 1D Hyperbolic Systems with Application to Plug-Flow Heat Exchangers" Mathematics 9, no. 20: 2609. https://doi.org/10.3390/math9202609
APA StyleDostál, J., & Havlena, V. (2021). Mixed Mesh Finite Volume Method for 1D Hyperbolic Systems with Application to Plug-Flow Heat Exchangers. Mathematics, 9(20), 2609. https://doi.org/10.3390/math9202609