1. Introduction
Fractional calculus is a field of Mathematics that consists of ordinary and partial derivatives of positive non-integer order, it has attracted huge attention because it provides practical models than the integer derivative [
1,
2,
3,
4,
5,
6], for comprehensive study on fractional calculus see [
7,
8,
9,
10,
11].
Integral transform for solving problems in science can be traced back to the work of P.S. Laplace (1749–1827) on probability theory in the 1780’s, also to the treatise of J.B. Fourier (1768–1830) titled “La Thèorie Analytique de La chaleur” published in 1822 [
12]. Since then, the establishment and development of new integral transforms with various modifications have been of great interest to researchers [
13,
14,
15,
16,
17,
18].
A new iterative method was proposed by Daftardar–Gejji and Jafari [
19] to solve functional equations, the solutions were presented in series form. The new iterative method is formulated on the basis of decomposing the nonlinear terms. Several authors have used the new iterative method to solve linear and nonlinear fractional partial differential equations [
20,
21,
22,
23,
24]. Nonlinear
fractional-order epidemic model for the transmission of dynamics of HIV epidemics has been solved in [
25] using generalized mean value theorem. Nonlinear fractional-order SIR epidemic model with memory was solved in [
26] using a numerical scheme that considered past activity. The fractional-order model of an energy supply–demand system was examined in [
27], this fractional model can also be used to adjust and control the supply and demand of energy in countries with limited energy resources, for more fractional biological models, see [
28,
29].
The main objective of this paper is to use Aboodh transform iterative method to obtain the approximate analytical solution of the time-fractional biological population model [
30].
with the initial condition
where
Q represents the population density and
the population supply by reason of deaths and births,
are real numbers,
denotes the differential operator in Caputo sense, for Hölder estimates and its solution see [
31], the constitutive equations are given as
C is a constant, Malthusian Law [
32].
for positive constant
and
, Verhulst Law [
31].
C is a constant, Porous media [
33,
34].
The fractional differential equation is very useful in modeling biological systems because it is naturally related to biological systems with memory which is a major advantage over the classical integer order mathematical models and they are related to fractals which are plenty in biological systems. A class of traveling wave solutions for nonlinear one-dimensional space–time fractional biological population model was considered in [
35] using
expansion method. Linear and nonlinear biological population models were solved using Adomian decomposition method, homotopy analysis method, homotopy perturbation method, variational iteration method and iterative Laplace transform method [
36,
37,
38]. The draw back with most of the aforementioned methods is that they require complex and so much computational effort. To reduce the computational effort and complexity, we proposed a new method called the Aboodh transform iterative method, which is a combination of the Aboodh transform and the new iterative method for solving the time-fractional biological population model which is the novelty of this study. The proposed method provides a solution in the form of a convergent series.
This paper is arranged as follows, we discussed briefly some definitions and preliminary concepts of Aboodh transform in
Section 2, in
Section 3, we considered the idea of the Aboodh transform iterative method and in
Section 4, we illustrate the accuracy and efficiency of the method by considering some cases of practical importance. Finally, we presented the conclusion in
Section 5.
3. Aboodh Transform Iterative Method
In this section, we describe the fundamental idea of Aboodh transform iterative method. Aboodh transform is a modification of the Laplace transform and it is defined in the time domain
Consider the initial value problem of the form
with initial condition
is the source function, while
R and
N are the linear and nonlinear operators respectively. Applying Aboodh transform on both sides of Equation (
14) and using the initial condition, we get
Simplifying and taking the inverse Aboodh transform of both sides of Equation (
16), we get
The nonlinear operator
N is decomposed as [
19]
In a similar manner, linear operator
R can be decomposed as
Next, we define the
m-th order approximate series as
If we assume that the solution of Equation (
14) is
Then, the series in Equation (
21) absolutely and uniformly converges to unique solution for Equation (
14) [
19] if
N and
R are contractions. By substituting Equations (
18) and (
20) into (
17) with the application of the linearity property, we get
Then, we create the following iterations
The series solution converges, for a classical approach to the convergence of this series see [
19,
43].
4. Applications
In this section, we considered some cases to demonstrate the efficiency and the effectiveness of the proposed method.
4.1. Case 1
If
( Verhulst Law [
32] ) and
for one dimensional time-fractional biological population model Equation (
1) becomes
from case 1, we set
,
,
.
Using the iterative procedure described in
Section 3,
The
m-th order approximate series is derived as
So, the
m-th order approximate series solution approach the exact solution as
taking
the exact solution to Equation (
26) is
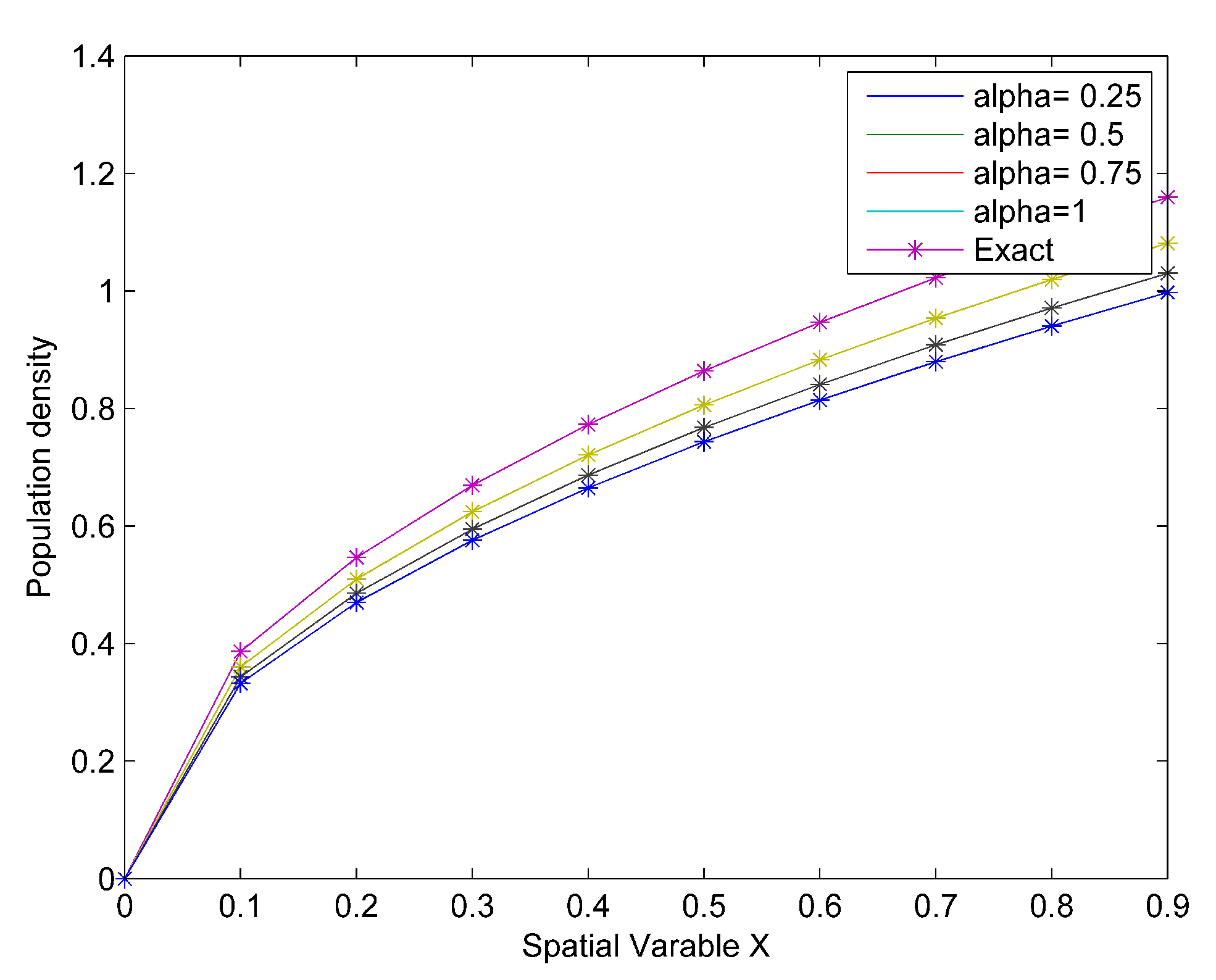
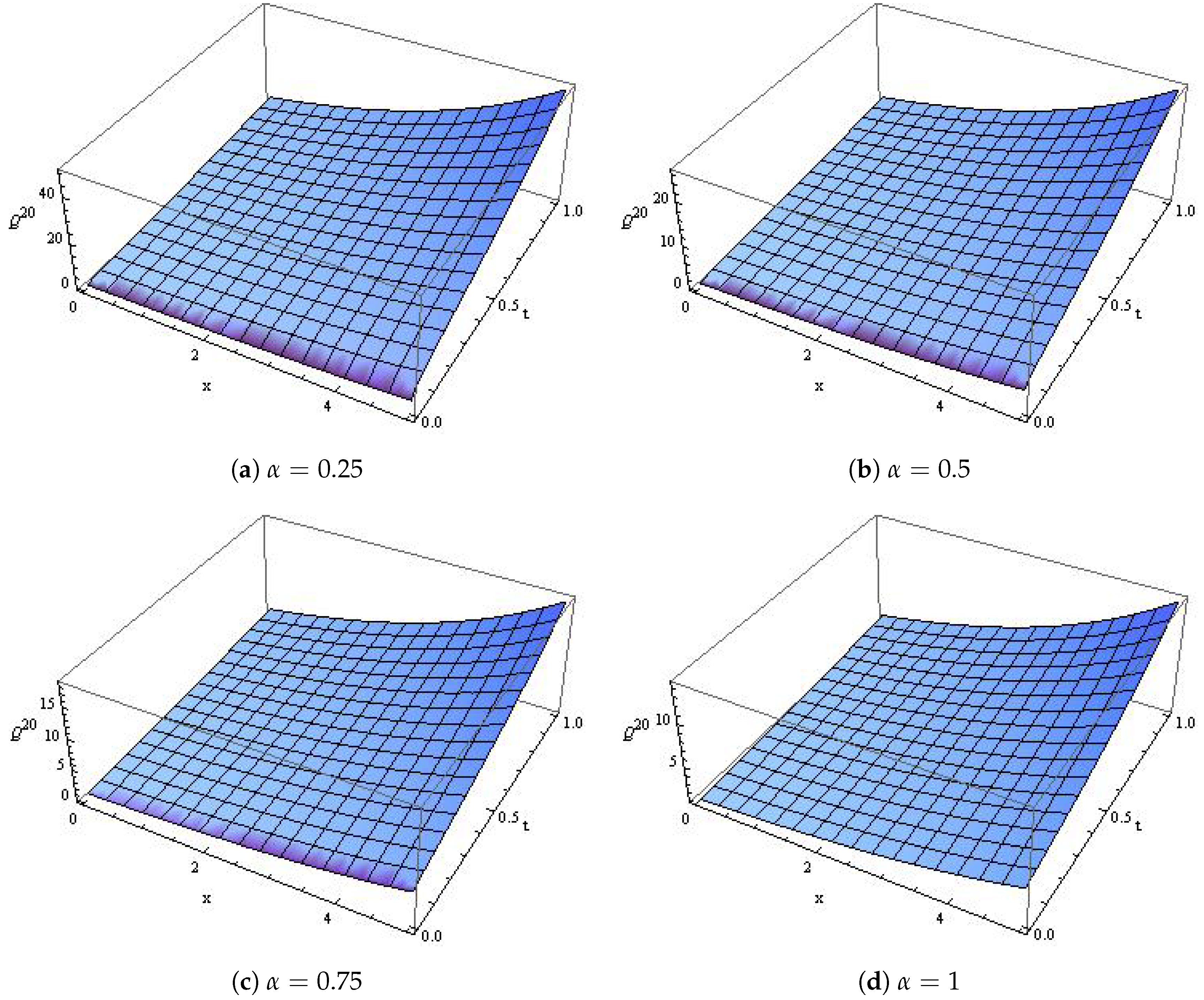
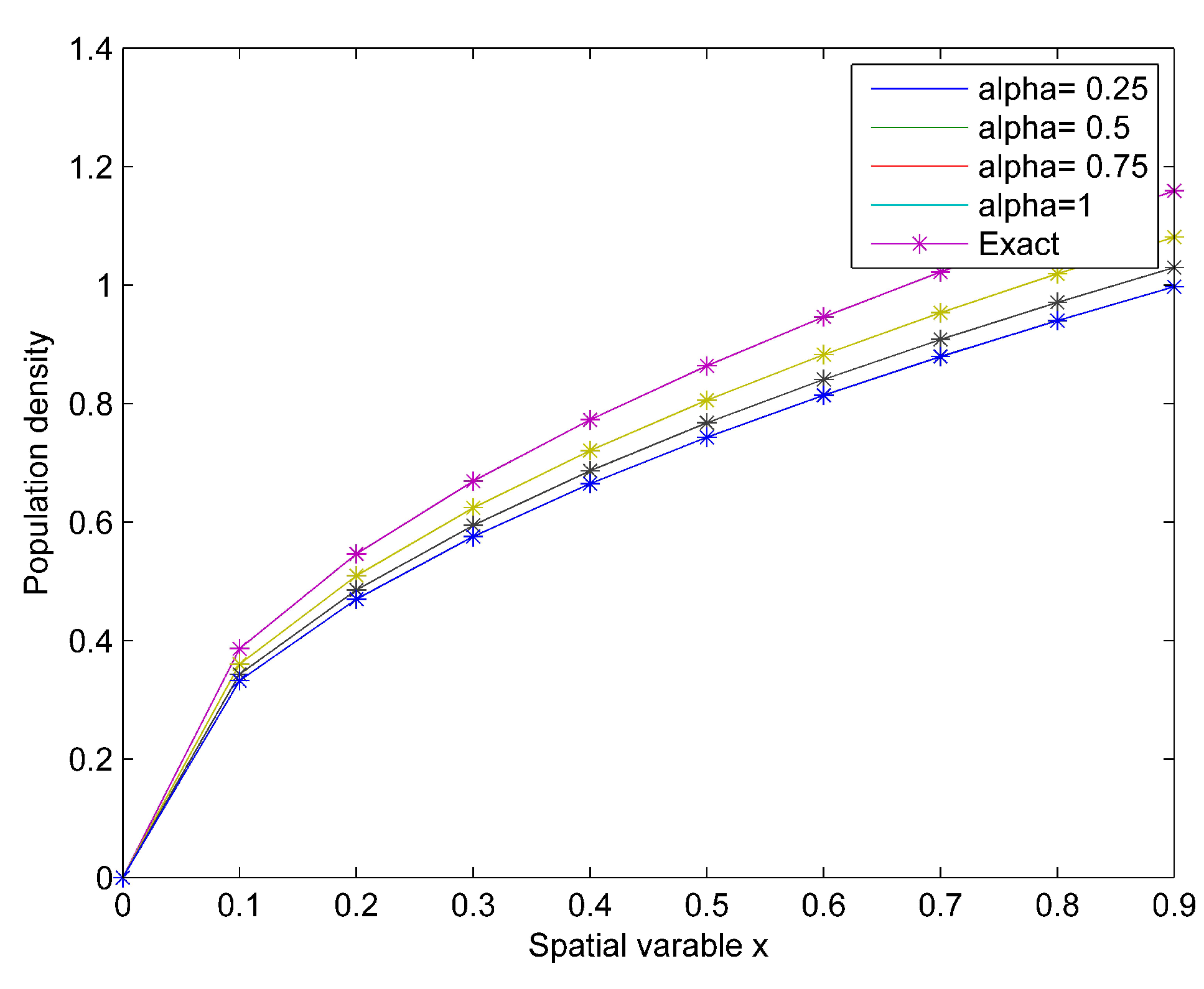
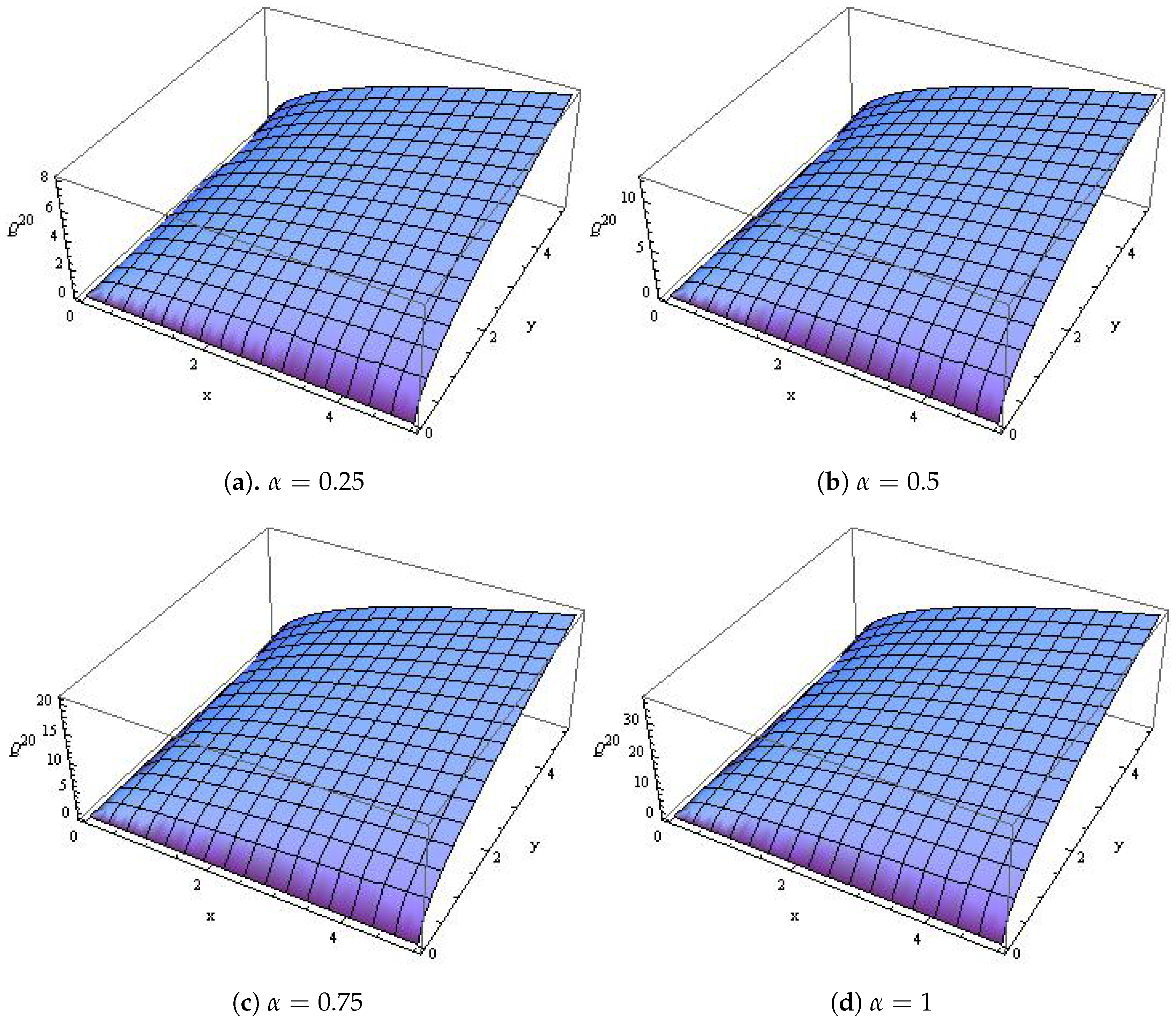
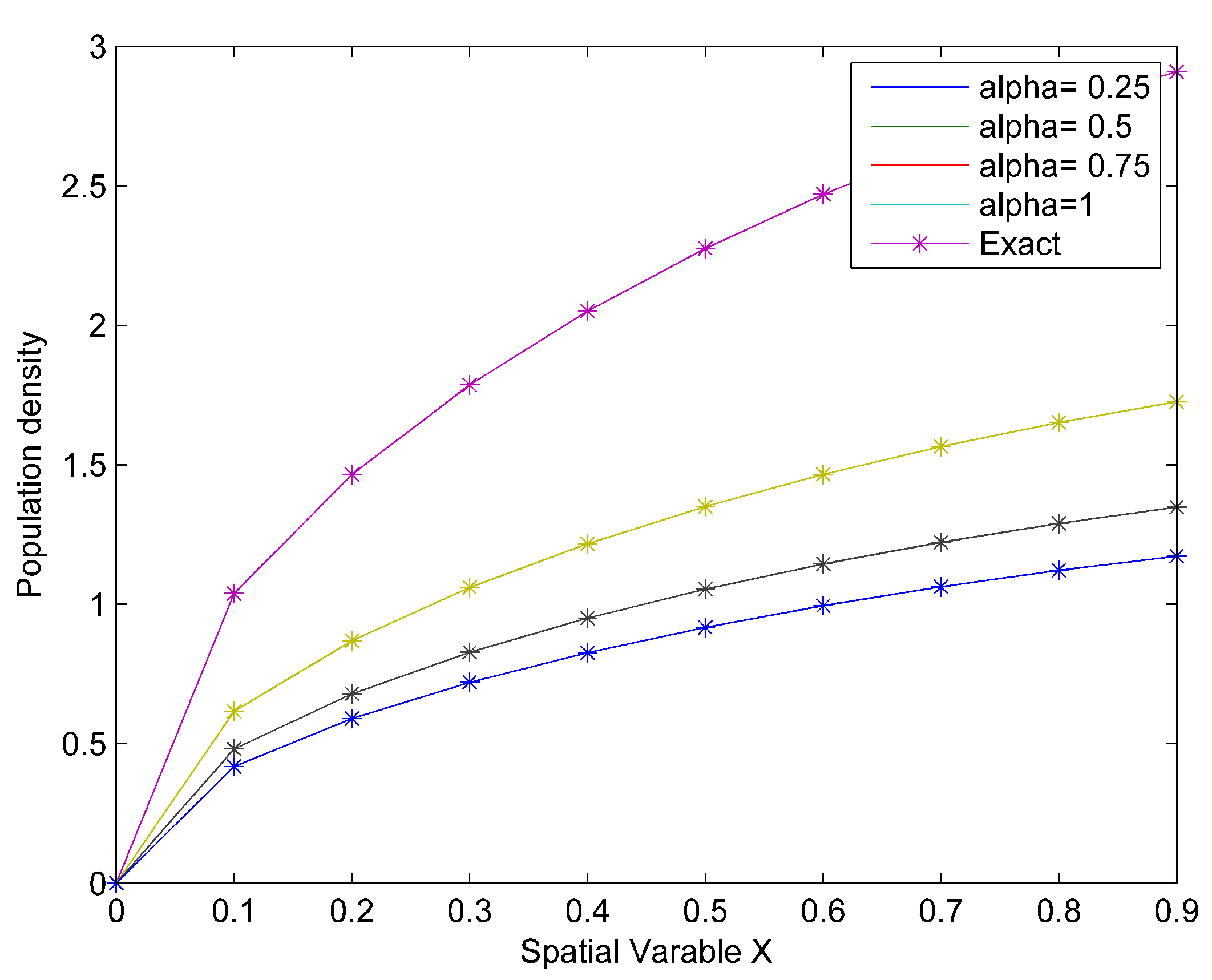
Table 2 shows the absolute error
when
and 1,
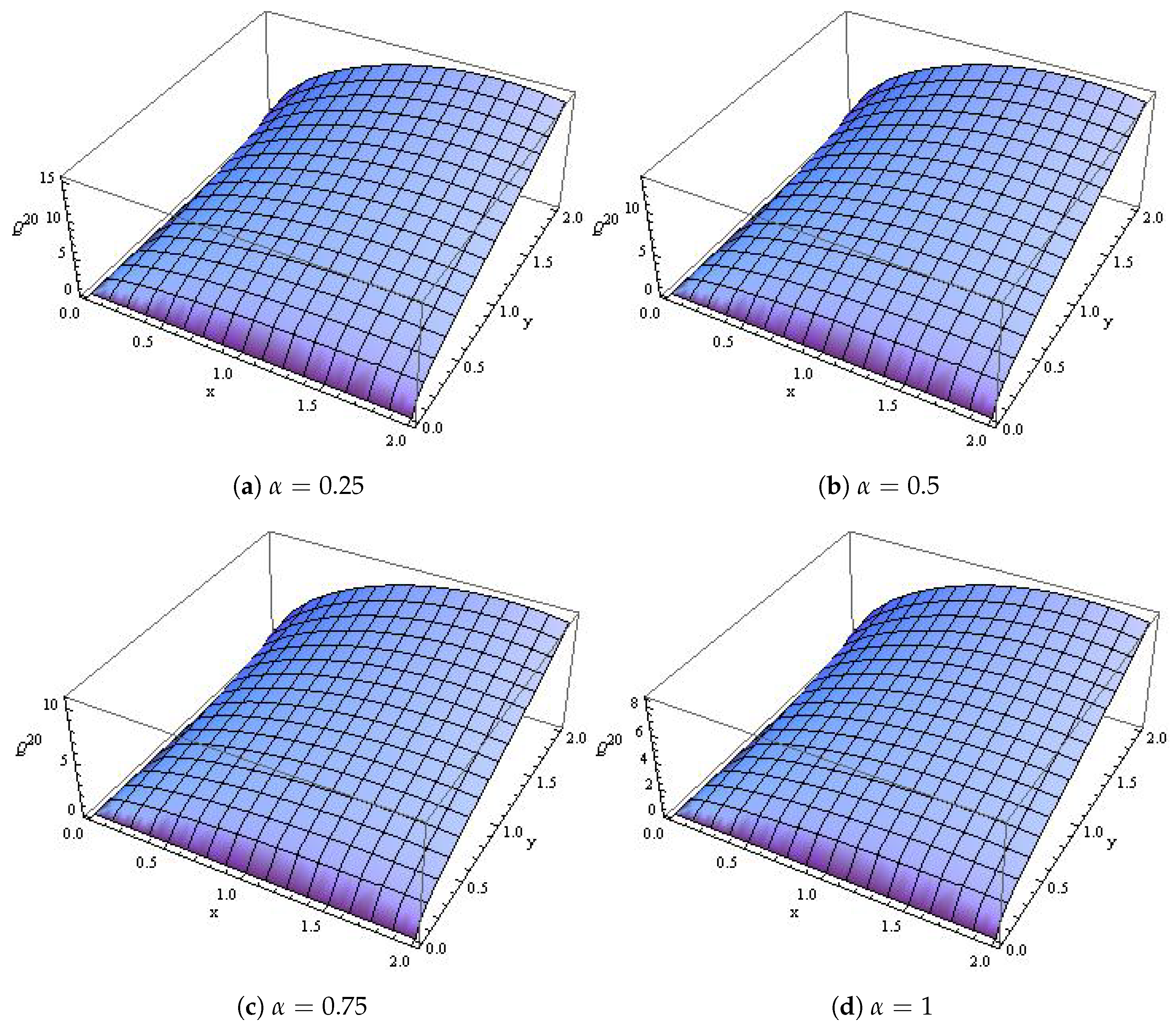
Figure 1 shows the comparison between the exact solution and the approximate solution while
Figure 2 shows the surface plot of the population density when
and
4.2. Case 2
If
(Malthusian Law [
32] ) and
for one dimensional time-fractional biological population model Equation (
1) becomes
from case 2, we set
,
,
.
Using the iterative procedure described in
Section 3,
The
m-th order approximate series is derived as
So, the
m-th order approximate series solution approach the exact solution as
taking
the exact solution to Equation (
33) is
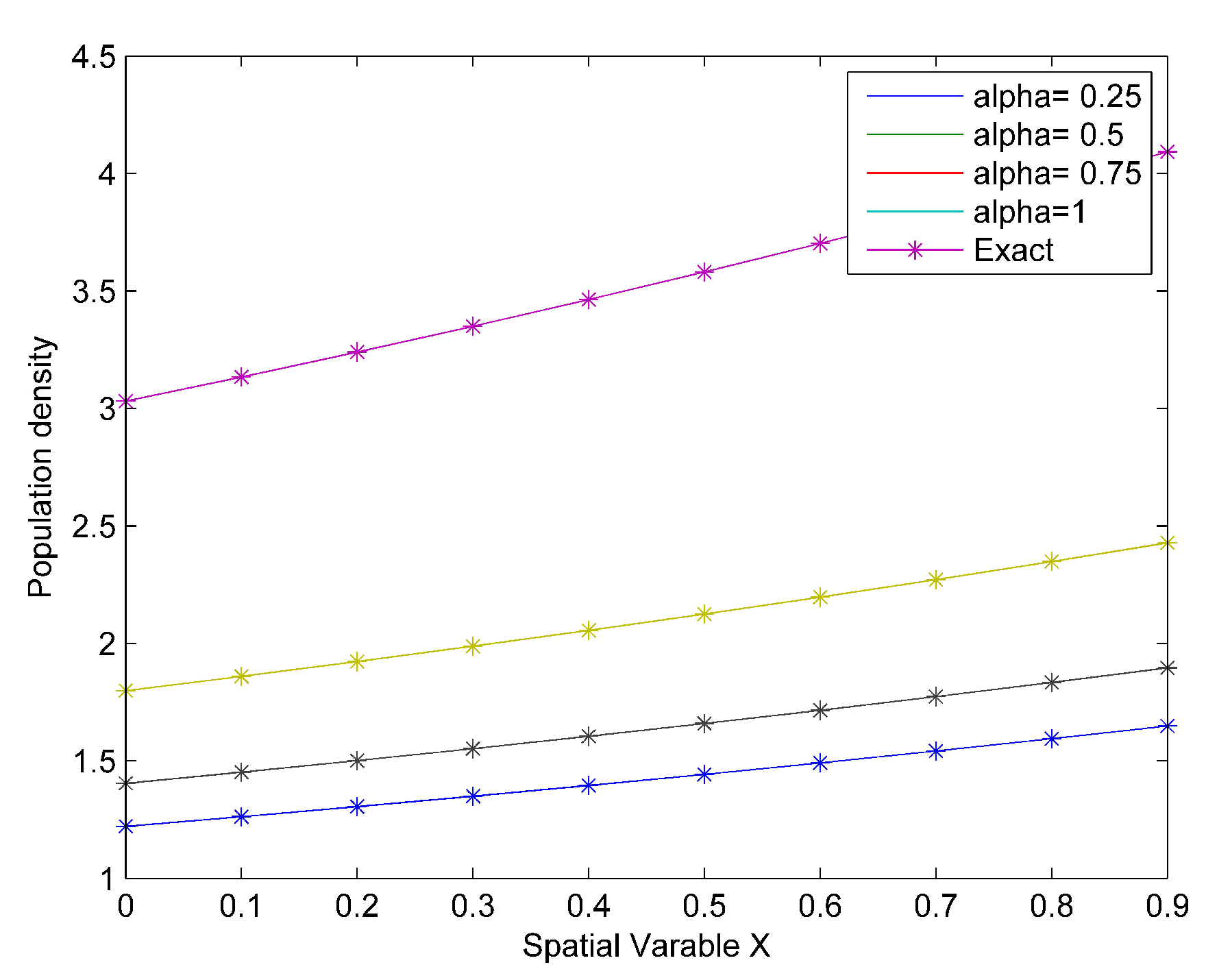
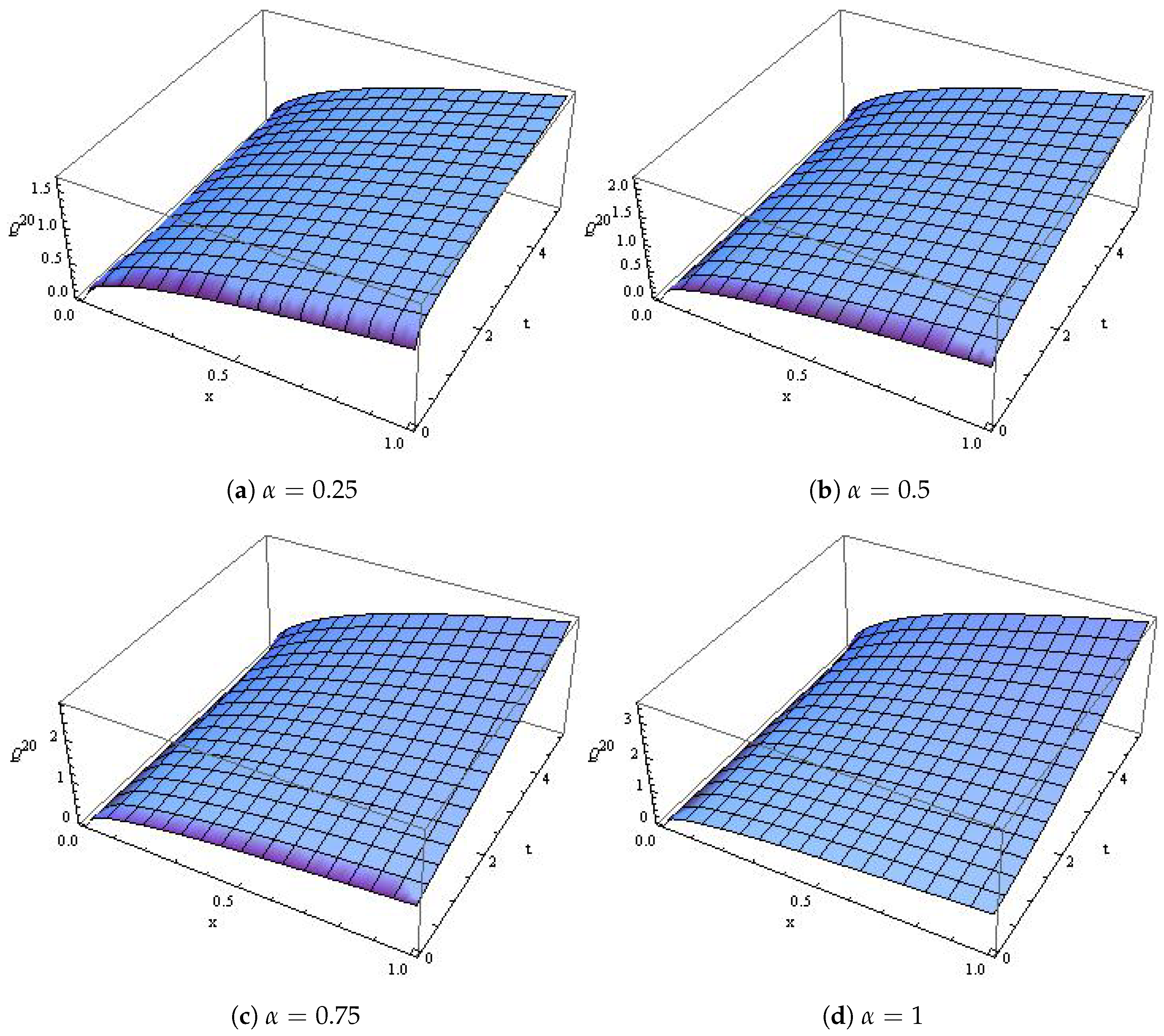
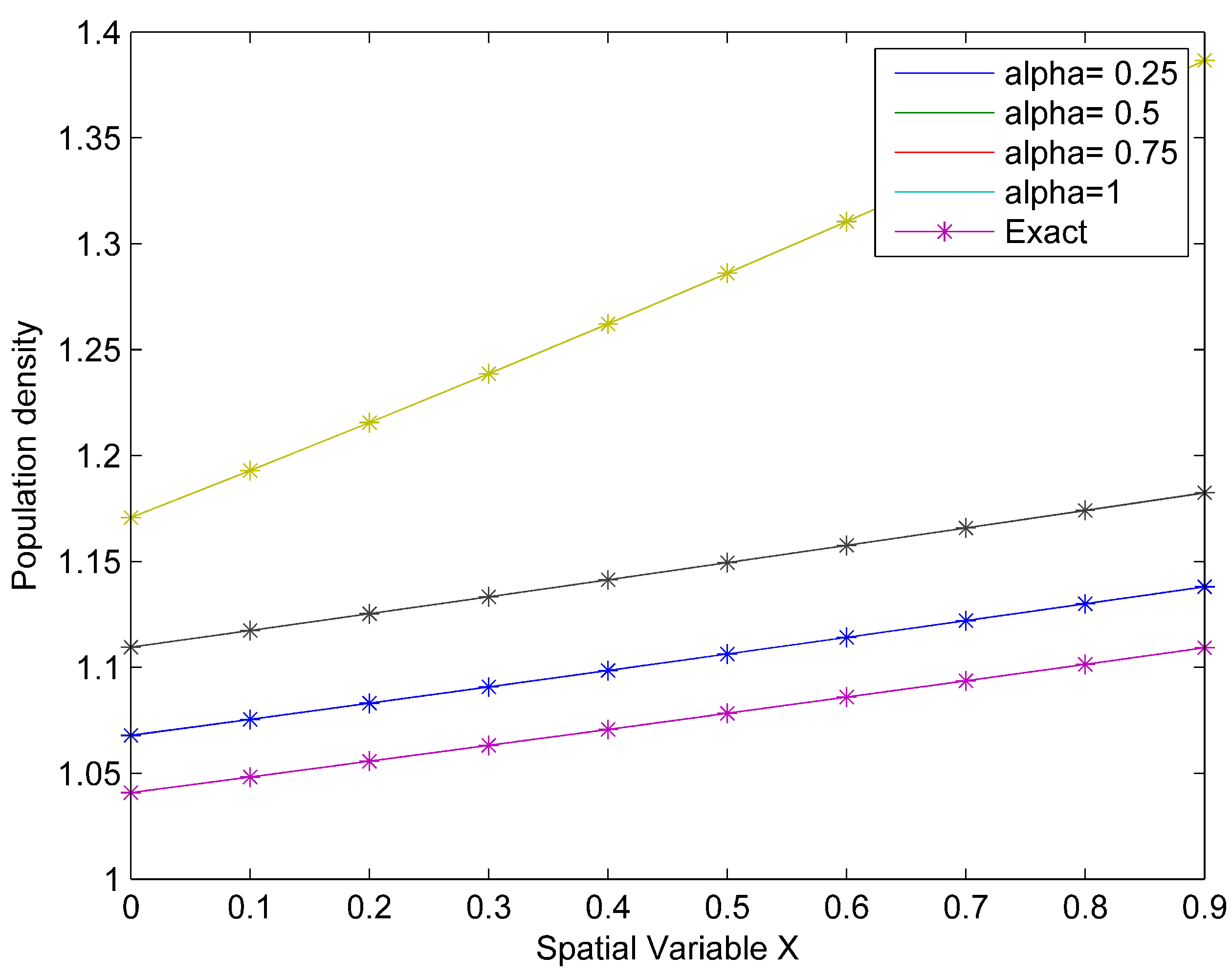
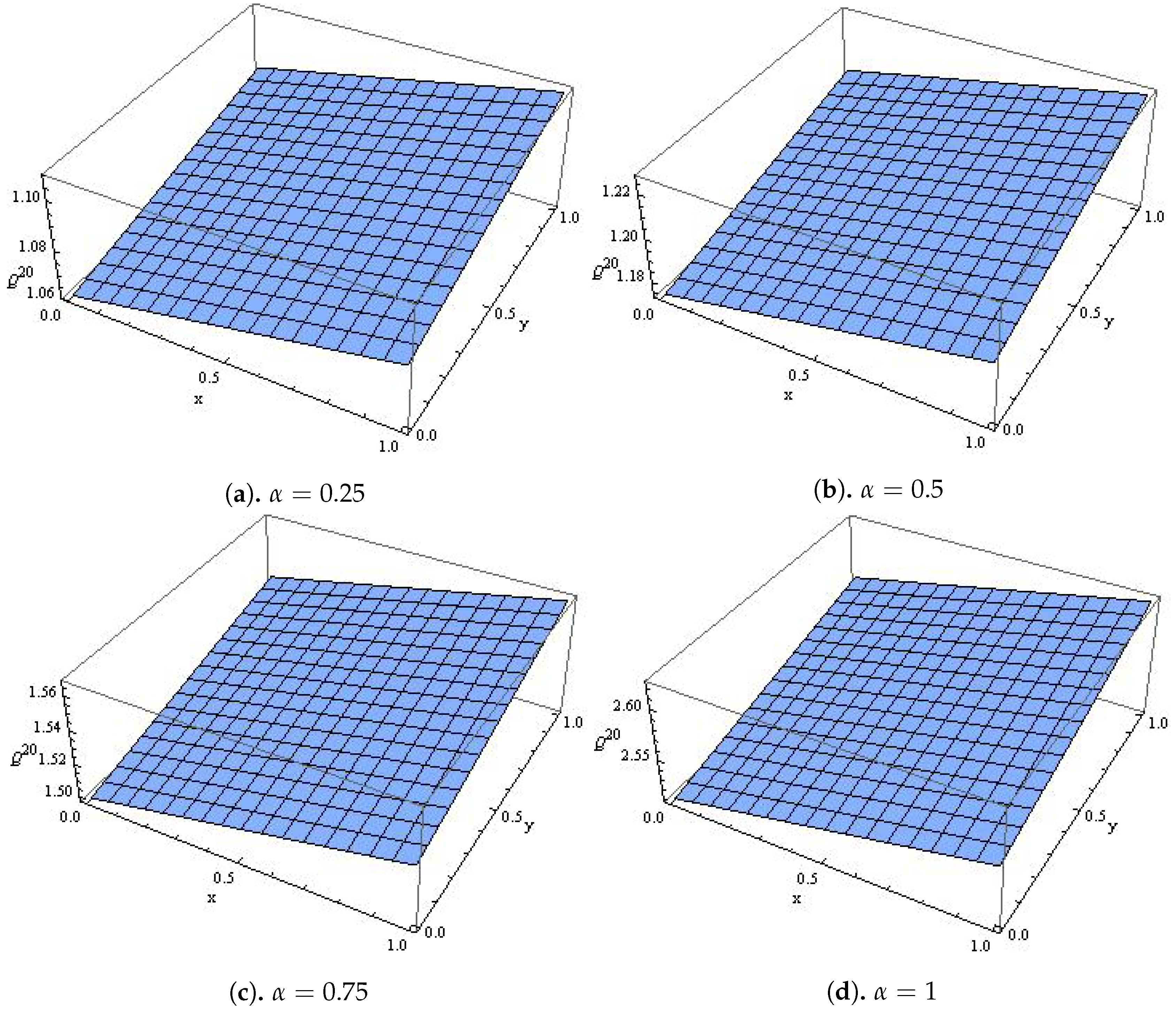
Table 3 shows the absolute error
when
and 1,
Figure 3 shows the comparison between the exact solution and the approximate solution while
Figure 4 shows the surface plot of the population density when
and
4.3. Case 3
If
(Malthusian Law [
32] ) and
the time-fractional biological population model Equation (
1) becomes
from case 3, we set
,
,
.
Using the iterative procedure described in
Section 3,
The
m-th order approximate series is derived as
So, the
m-th order approximate series solution approaches the exact solution as
,
taking
, the exact solution to Equation (
42) is
which is the exact solution to the standard biological population model in [
37] when
and
Table 4 shows the absolute error
when
and 1,
Figure 5 shows the comparison between the exact solution and approximate solution while
Figure 6 shows the surface plot of the population density when
and
In
Table 5, we compared the absolute error of the present method with the method in [
44] when
.
4.4. Case 4
If
( Verhulst Law [
32] ) and
the time-fractional biological population model Equation (
1) becomes
from case 4, we set
,
,
.
Using the iterative procedure described in
Section 3,
The
m-th order approximate series is derived as
So, the
m-th order approximate series solution approach the exact solution as
,
taking
, the exact solution to Equation (
50) is
which is the exact solution to the biological population model in [
36] when
Table 6 shows the absolute error
when
and 1,
Figure 7 shows the comparison between the exact solution and approximate solution while
Figure 8 shows the surface plot of the population density when
and
4.5. Case 5
If
and
the time-fractional biological population model Equation (
1) becomes
from case 4, we set
,
,
.
Using the iterative procedure described in
Section 3,
The
m-th order approximate series is derived as
So, the
m-th order approximate series solution approach the exact solution as
,
taking
, the exact solution to Equation (58) is
which is the exact solution to the biological population model in [
45].
Table 7 shows the absolute error
when
and 1,
Figure 9 shows the comparison between the exact and approximate solutions while
Figure 10 shows the surface plot of the population density when
and
In
Table 8, we compared the absolute error of the present method with the method in [
44] when
.
5. Conclusions
In this paper, we used the Aboodh transform iterative method to obtain the approximate analytical solutions of one and two dimensions fractional biological population models. To the best of our knowledge, no attempt has been made regarding the approximate analytical solution of fractional biological population models using the Aboodh transform iterative method which is the novelty of this study. We observed that the series form solutions converged to the exact solutions which agree strongly with the results in [
37,
44,
45]. The graphical solution of
Figure 1,
Figure 2,
Figure 3,
Figure 4,
Figure 5,
Figure 6,
Figure 7,
Figure 8,
Figure 9 and
Figure 10 and
Table 2,
Table 3,
Table 4,
Table 5,
Table 6,
Table 7 and
Table 8 revealed that the solutions depends not only on the time
t but also on the fractional-order
. The population density increases with the spatial variables and time, an indication that the fractional model complements the anomalous biological diffusion behavior observed in the field.
Figure 1,
Figure 3,
Figure 5,
Figure 7 and
Figure 9 showed that the exact and approximate series solutions were nearly identical for different values of
However, the approximate series solution can be improved by increasing the values of
Finally, the easy implementation of the proposed method suggests that it can be modified for the solutions of other fractional partial differential equations arising in applied science. In the future, the authors intend to study the stability and error analysis of the proposed method.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}