
A New Derivative-Free Method to Solve Nonlinear Equations


Abstract
1. Introduction
2. New Method
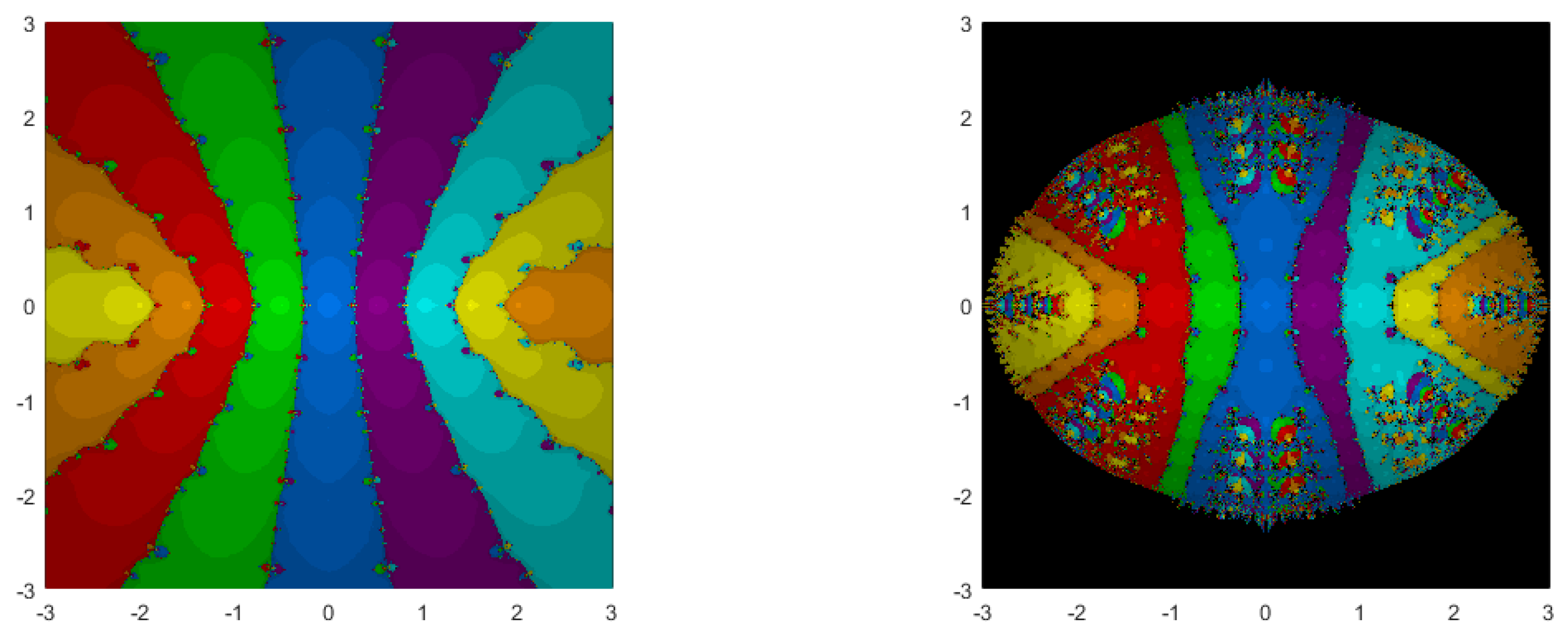
3. Dynamics Study of the Methods
4. Conclusions
Funding
Conflicts of Interest
References
- Colebrook, C.F. Turbulent flows in pipes, with particular reference to the transition between the smooth and rough pipe laws. J. Inst. Civ. Eng. 1939, 11, 130. [Google Scholar] [CrossRef]
- Ricceri, B. A class of equations with three solutions. Mathematics 2020, 8, 478. [Google Scholar] [CrossRef]
- Treantă, S. Gradient structures associated with a polynomial differential equation. Mathematics 2020, 8, 535. [Google Scholar] [CrossRef]
- Halley, E. A new, exact and easy method of finding the roots of equations generally and that without any previous reduction. Philos. Trans. R. Soc. Lond. 1694, 18, 136–148. [Google Scholar]
- Petković, M.S.; Neta, B.; Petković, L.D.; Džunić, J. Multipoint Methods for the Solution of Nonlinear Equations; Elsevier: Amsterdam, The Netherlands, 2012. [Google Scholar]
- Steffensen, J.F. Remarks on iteration. Scand. Actuar. J. 1933, 1, 64–72. [Google Scholar] [CrossRef]
- Kansal, M.; Alshomrani, A.S.; Bhalla, S.; Behl, R.; Salimi, M. One parameter optimal derivative-free family to find the multiple roots of algebraic nonlinear equations. Mathematics 2020, 8, 2223. [Google Scholar] [CrossRef]
- Zhanlav, T.; Otgondorj, K. Comparison of some optimal derivative-free three-point iterations. J. Numer. Anal. Approx. Theory 2020, 49, 76–90. [Google Scholar]
- Neta, B. Basin attractors for derivative-free methods to find simple roots of nonlinear equations. J. Numer. Anal. Approx. Theory 2020, 49, 177–189. [Google Scholar]
- Traub, J.F. Iterative Methods for the Solution of Equations; Prentice Hall: New York, NY, USA, 1964. [Google Scholar]
- Kung, H.T.; Traub, J.F. Optimal order of one-point and multipoint iteration. J. Assoc. Comput. Math. 1974, 21, 634–651. [Google Scholar] [CrossRef]
- Stewart, B.D. Attractor Basins of Various Root-Finding Methods. Master’s Thesis, Naval Postgraduate School, Department of Applied Mathematics, Monterey, CA, USA, June 2001. [Google Scholar]
- Chun, C.; Neta, B. Comparative study of methods of various orders for finding simple roots of nonlinear equations. J. Appl. Anal. Comput. 2019, 9, 400–427. [Google Scholar] [CrossRef]
- Chun, C.; Neta, B. Comparative study of methods of various orders for finding repeated roots of nonlinear equations. J. Comput. Appl. Math. 2018, 340, 11–42. [Google Scholar] [CrossRef]


{kind=link}
| Index | Number of Iterations | COC | ||
|---|---|---|---|---|
| 1 | 10.0 | 8 | 6.78 | |
| 2 | −2.6 | 30 | 7.048 | |
| 3 | 2.0 | 3 | 6.622 | |
| 4 | 3.5 | 4 | 6.728 | |
| 5 | 4.0 | 4 | 6.901 | |
| 6 | −1.0 | 3 | 7.048 | |
| 7 | 4.0 | 9 | 6.793 | |
| 8 | 2.0 | 3 | 6.848 | |
| 9 | 4.0 | 4 | 6.780 | |
| 10 | 9.0 | 3 | 6.674 | |
| 11 | 0.0 | 5 | 7.049 | |
| 12 | 10.0 | 3 | 6.659 | |
| 13 | 4.0 | 4 | 6.912 | |
| 14 | 10.0 | 7 | 6.749 | |
| 15 | 5.0 | 5 | 7.394 | |
| 16 | 15.0 | 14 | 6.964 |
| Method | Ex1 | Ex2 | Ex3 | Ex4 | Ex5 | Average |
|---|---|---|---|---|---|---|
| TZKO | 290.886 | 545.869 | 621.265 | 745.541 | 334.541 | 507.620 |
| Neta | 201.156 | 277.703 | 391.063 | 435.844 | 302.438 | 321.641 |
| Method | Ex1 | Ex2 | Ex3 | Ex4 | Ex5 | Average |
|---|---|---|---|---|---|---|
| TZKO | 11.85 | 19.52 | 25.60 | 29.26 | 12.25 | 19.70 |
| Neta | 6.77 | 8.01 | 10.72 | 11.02 | 8.37 | 8.98 |
| Method | Ex1 | Ex2 | Ex3 | Ex4 | Ex5 | Average |
|---|---|---|---|---|---|---|
| TZKO | 2364 | 16,674 | 27,745 | 33,419 | 2640 | 16,568 |
| Neta | 487 | 0 | 0 | 0 | 2542 | 606 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Neta, B. A New Derivative-Free Method to Solve Nonlinear Equations. Mathematics 2021, 9, 583. https://doi.org/10.3390/math9060583
Neta B. A New Derivative-Free Method to Solve Nonlinear Equations. Mathematics. 2021; 9(6):583. https://doi.org/10.3390/math9060583
Chicago/Turabian StyleNeta, Beny. 2021. "A New Derivative-Free Method to Solve Nonlinear Equations" Mathematics 9, no. 6: 583. https://doi.org/10.3390/math9060583
APA StyleNeta, B. (2021). A New Derivative-Free Method to Solve Nonlinear Equations. Mathematics, 9(6), 583. https://doi.org/10.3390/math9060583