
Application of Decomposable Semi-Regenerative Processes to the Study of k-out-of-n Systems




{kind=link}
{kind=link}
Abstract
:1. Introduction and Motivation
2. State of Problem. Notations
- Partial repair — when after the system’s failure, the repair of the component being repaired is prolonged, and after its end, the system passes to state ; or
- Full repair — when after the system’s failure, the repair of the whole system begins, and after its end, the system becomes as good as new, and enters state 0.
- The lifetimes of the systems’ components are independent identically distributed (i.i.d.) random variables (r.v.’s) that are exponentially distributed with parameter .
- Failed components are repaired by a single facility and after repair become as good as new.
- Repair times are i.i.d. r.v.’s for partial and for full repair, respectively, with the common cumulative distribution functions (c.d.f.’s) and .
- — symbols of probability and expectation, symbols are used for conditional probability and expectation, given that the initial state of the process is i;
- is the random time to one of the system’s component failures, when it is in the state i;
- is the parameter of this r.v. (intensity of the failure of one of the components—when the system is in the state i, sometimes the notation for this value is also used);
- is the system set of states, where j means the number of failed components and k is the system failure state;
- with this set of states, we define the random process by the correlation:
- system (and the process) state probabilities
- T is the time to the system failure,
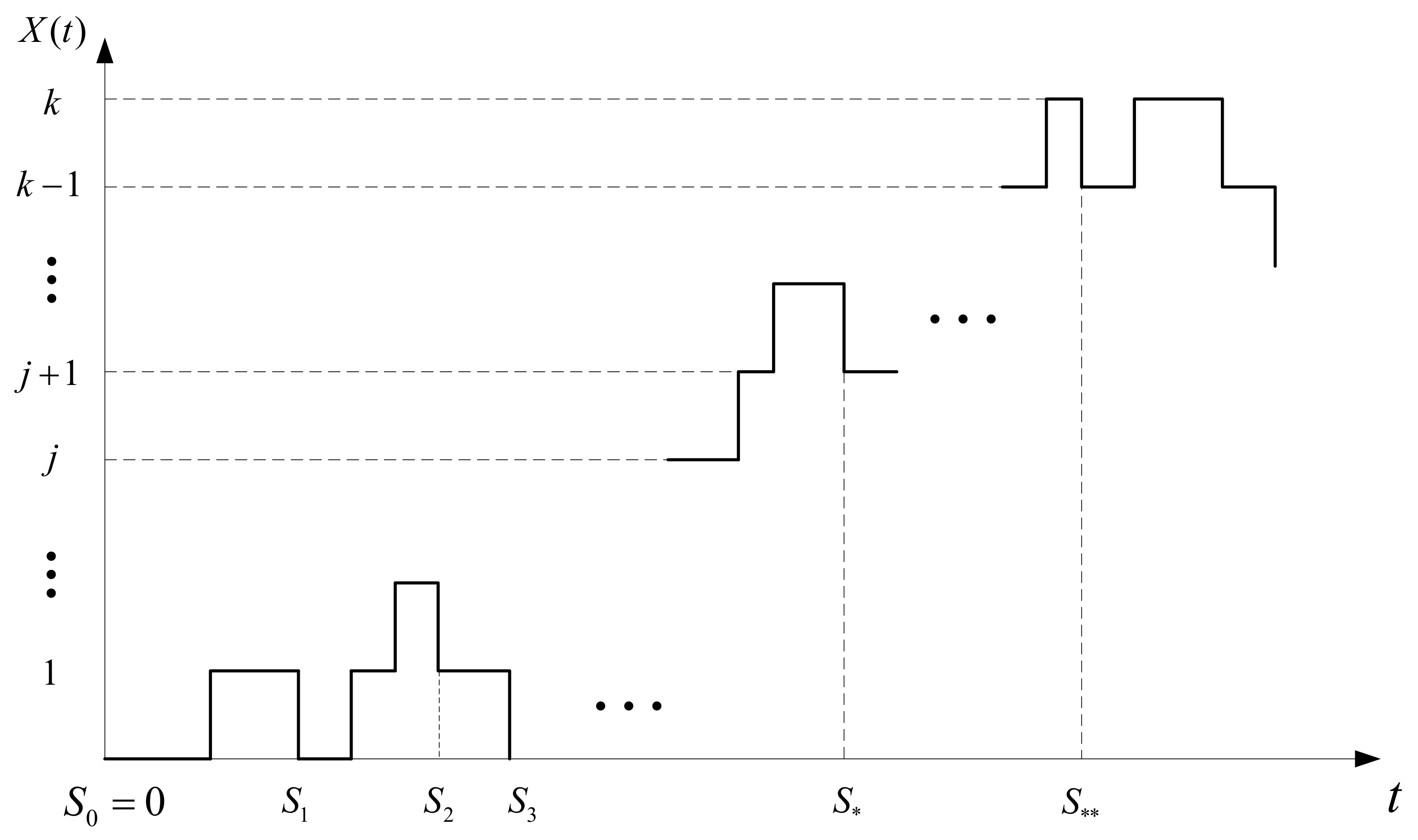
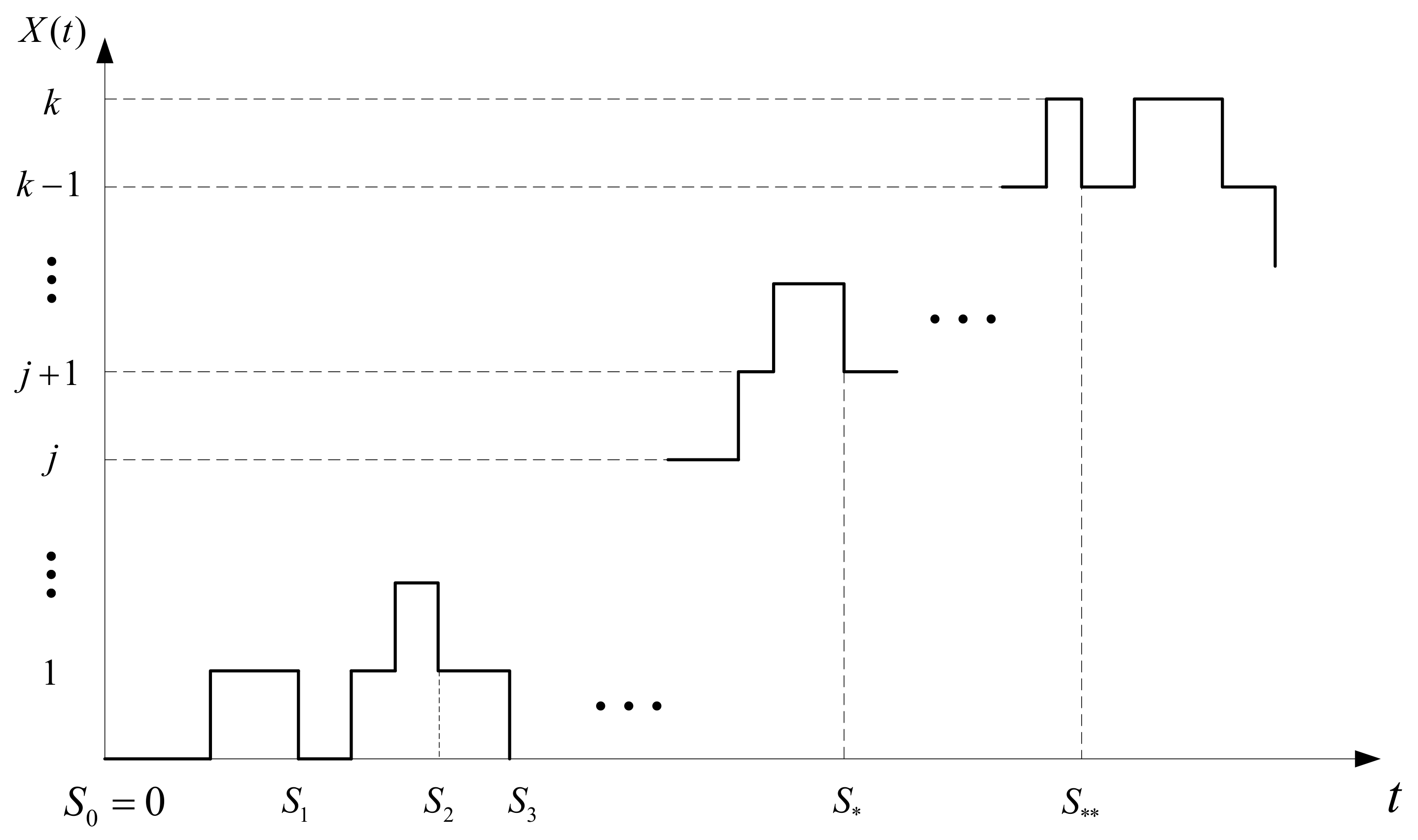
3. Partial Repair Regime
3.1. Semi-Regenerative Process
3.2. Behavior of the Process in a Separate Semi-Regeneration Period
3.3. Time-Dependent and Stationary Probabilities
3.4. Example 1
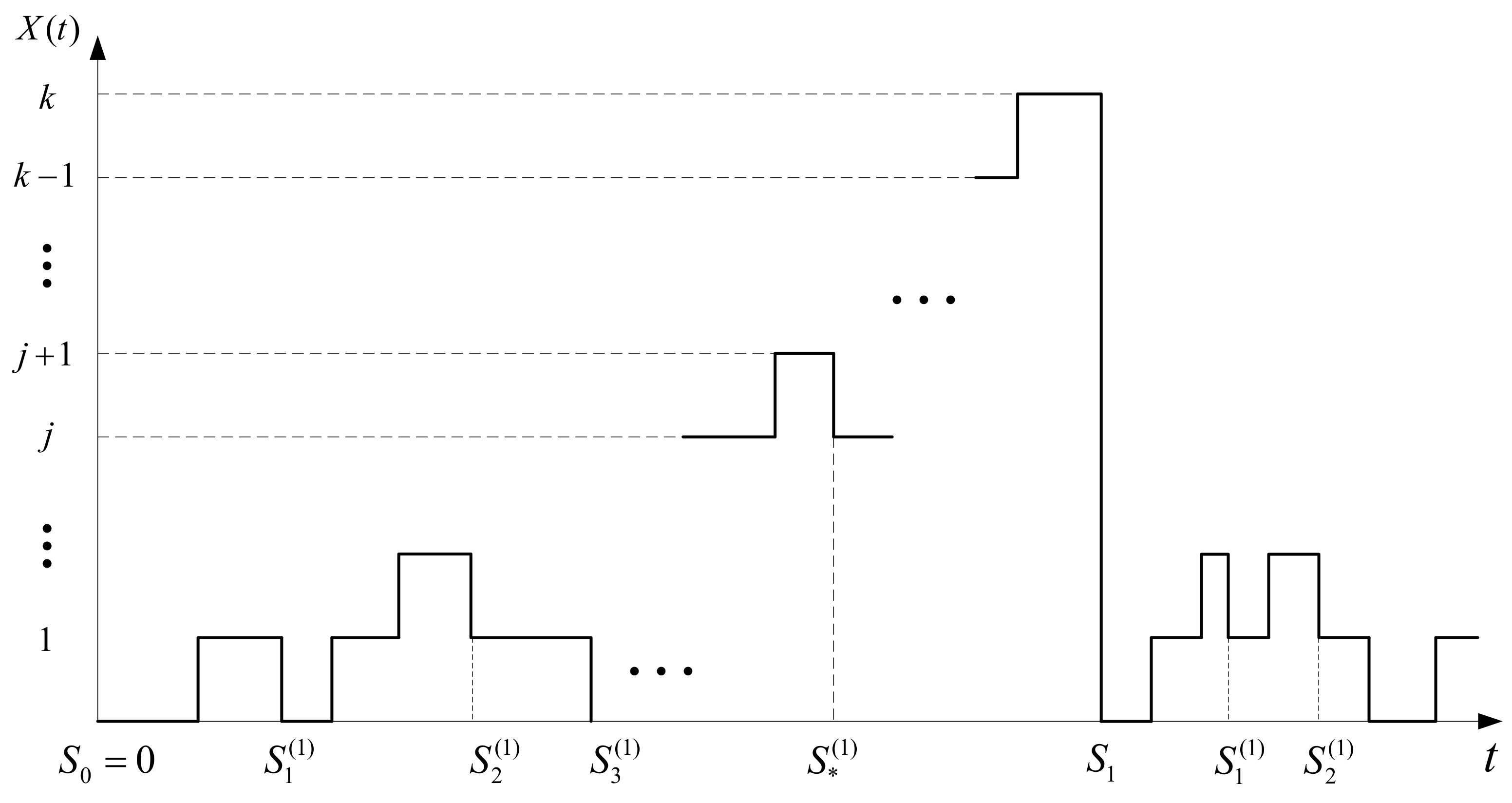
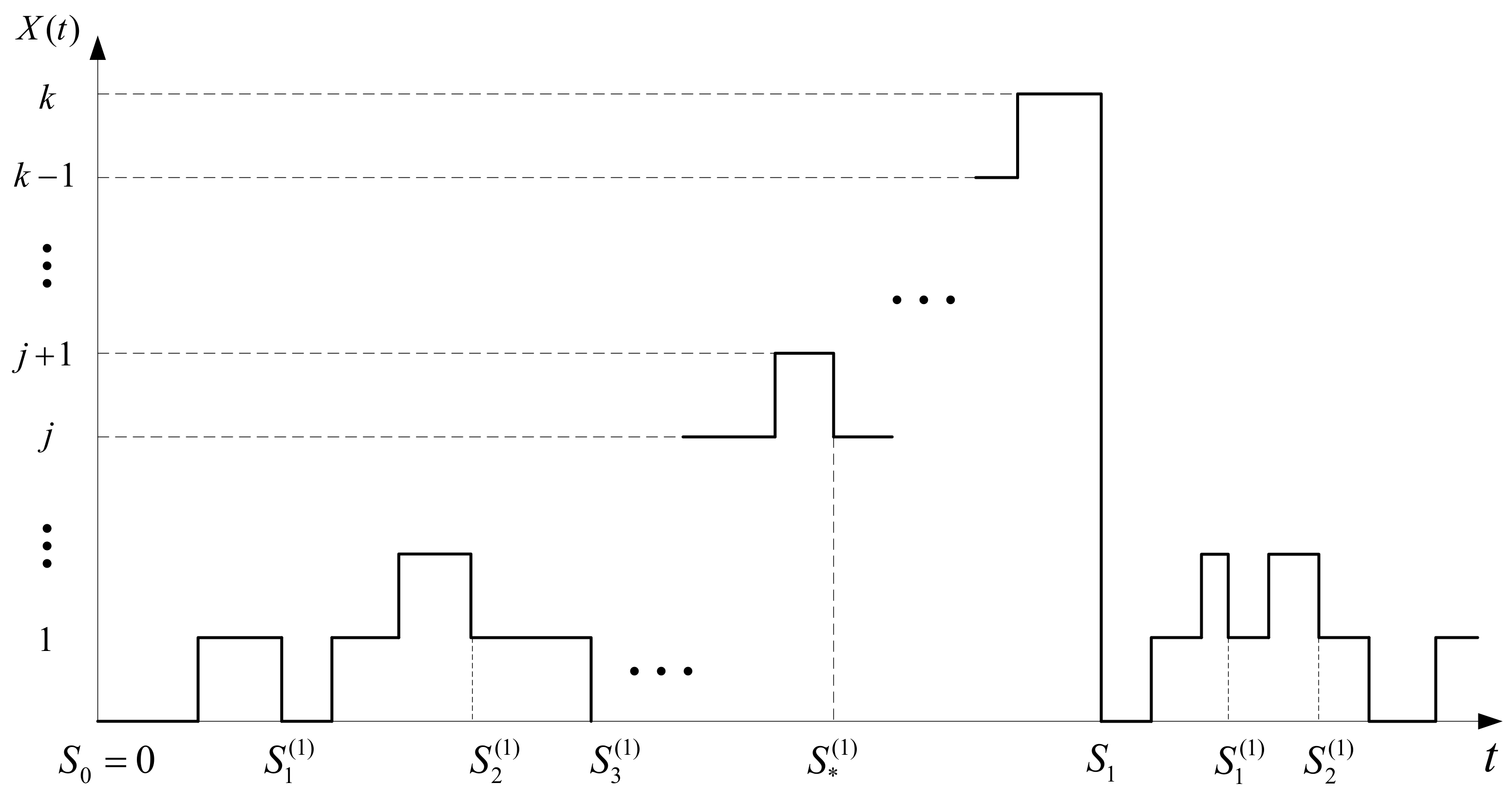
4. Full Repair Regime
4.1. The Main Regenerative Process
4.2. Embedded Semi-Regenerative Process
- the intervals between embedded semi-regeneration times of the ESRP (time points between the components repair completions);
- the embedded semi-Markov matrix (ESMM) whose components are the process transition probabilities between semi-regeneration times:
- the vector-function, the components of which are the c.d.f.’s of the first passage time from state i to the absorbing state k by the ESRP along a monotone trajectory.
- the vector-function, the components of which are c.d.f.’s of the absorbing state k destination time by the ESRP starting from state ;
- the embedded Markov renewal matrix, whose components are the conditional embedded renewal functions in the separate lifetime period:
- (1)
- The differentials of the ESMM components of the process are:while the differentials of the components of vector are:
- (2)
- The corresponding LST for the components of matrix are equal to:while the corresponding LST for the components of vector are:
4.3. Process State Probabilities in a Separate Lifetime Period
- matrix , whose components are transition probabilities of the process within a separate lifetime:
- matrix , whose components are transition probabilities of the process in a separate embedded semi-regeneration period (between successive repair completions):
4.4. Process Time-Dependent and Stationary State Probabilities
4.5. Example 2
5. Conclusions and Further Investigations
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| RP | Regenerative process |
| SRP | Semi-regenerative process |
| SMM | Semi-Markov matrix |
| MRM | Markov renewal matrix |
| DSRP | Decomposable semi-regenerative process |
| EMRM | Embedded renewal matrix |
| i.i.d. | Independent identically distributed |
| r.v. | Random variable |
| c.d.f. | Cumulative distribution function |
| t.d.s.p. | Time-dependent state probability |
| s.s.p. | Steady state probability |
| LT | Laplace transform |
| LST | Laplace–Stiltjes transform |
| ESRP | Embedded semi-regenerative process |
| ESMM | Embedded semi-Markov matrix |
| m.g.f. | Moment generating function |
References
- Smith, W.L. Regenerative stochastic processes. Proc. R. Soc. Ser. A 1955, 232, 6–31. [Google Scholar] [CrossRef]
- Cinlar, E. On semi-Markov processes on arbitrary space. Proc. Camb. Philos. Math. Proc. Camb. Philos. Soc. 1969, 66, 381–392. [Google Scholar] [CrossRef]
- Jacod, J. Theoreme de renouvellement et classification pour les chaines semi-Markoviennes. Ann. Inst. Henri Poincare B 1971, 7, 85–129. [Google Scholar]
- Korolyuk, V.S.; Turbin, A.F. Semi-Markov Processes and Their Applications; Kiev: Dumka, India, 1976; p. 184. [Google Scholar]
- Klimov, G.P. Stochastic Service Systems; Nauka: Moscow, Russia, 1966. [Google Scholar]
- Rykov, V.V.; Yastrebenetsky, M.A. On regenerative processes with several types of regeneration points. Cybernetics 1971, 3, 82–86. [Google Scholar]
- Nummelin, E. Uniform and ratio-limit theorems for Markov-renewal and semi-regenerative processes on a general state space. Ann. Inst. Henri Poincare B 1978, 14, 119–143. [Google Scholar]
- Rykov, V.V. Decomposable Semi-Regenerative Processes and Their Applications; Lap Lambert Academic Publishing: Berlin, Germany, 2011; p. 75. [Google Scholar]
- Rykov, V.V. Regenerative processes with embedded regeneration periods and their application for priority queuing systems investigation. Cybern. B 1975, 6, 105–111. [Google Scholar] [CrossRef]
- Rykov, V.V.; Jolkoff, S.Y. Generalized regenerative processes with embedded regeneration periods and their applications. MOS Ser. Optim. 1981, 12, 575–591. [Google Scholar]
- Rykov, V.V. Decomposable Semi-Regenerative Processes: Review of Theory and Applications to Queueing and Reliability Systems. RT&A 2021, 16, 157–190. [Google Scholar]
- Trivedi, K.S. Probability and Statistics with Reliability; Wiley: New York, NY, USA, 2002. [Google Scholar]
- Chakravarthy, S.R.; Krishnamoorthy, A.; Ushakumari, P.V. A k-out-of-n reliability system with an unreliable server and Phase type repairs and services: The (N,T) policy. J. Appl. Math. Stoch. Anal. 2001, 14, 361–380. [Google Scholar] [CrossRef] [Green Version]
- Rykov, V.; Kozyrev, D.; Filimonov, A.; Ivanova, N. On Reliability Function of a k-out-of-n System with General Repair Time Distribution. Probab. Eng. Inform. Sci. 2020, 51, 433–441. [Google Scholar] [CrossRef]
- Moustafa, M.S. Availability of k-out-of-n: G Systems with Exponential Failure and General Repairs. Econ. Qual. Control. 2001, 16, 75–82. [Google Scholar] [CrossRef] [Green Version]
- Linton, D.G.; Saw, J.G. Reliability analysis of the k-out-of-n: F system. IEEE Trans. Reliab. 1974, 23, 97–103. [Google Scholar] [CrossRef]
- Kala, Z. Sensitivity analysis in probabilistic structural design: A comparison of selected techniques. Sustainability 2020, 12, 4788. [Google Scholar] [CrossRef]
- Efrosinin, D.; Rykov, V.; Vishnevskiy, V. Sensitivity of Reliability Models to the Shape of Life and Repair Time Distributions. In Proceedings of the 9th International Conference on Availability, Reliability and Security (ARES 2014), Fribourg, Switzerland, 8–12 September 2014; pp. 430–437. [Google Scholar]
- Rykov, V. On Reliability of Renewable Systems. In Reliability Engineering; Vonta, I., Ram, M., Eds.; Theory and Applications: Boca Raton, FL, USA, 2018; pp. 173–196. [Google Scholar]
- Levitin, G.; Xing, L.; Dai, Y. Optimal operation and maintenance scheduling in m-out-of-n standby systems with reusable elements. Reliab. Eng. Syst. Saf. 2021, 211, 107582. [Google Scholar] [CrossRef]
- Yin, J.; Cui, L. Reliability for consecutive-k-out-of-n: F systems with shared components between adjacent subsystems. Reliab. Eng. Syst. Saf. 2021, 210, 107532. [Google Scholar] [CrossRef]
- Rykov, V.V.; Sukharev, M.G.; Itkin, V.Y. Investigations of the Potential Application of k-out-of-n Systems in Oil and Gas Industry Objects. J. Mar. Sci. Eng. 2020, 8, 928. [Google Scholar] [CrossRef]
- Rykov, V.; Kochueva, O.; Farkhadov, M. Preventive Maintenance of a k-out-of-n System with Applications in Subsea Pipeline Monitoring. J. Mar. Sci. Eng. 2021, 9, 85. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rykov, V.; Ivanova, N.; Kozyrev, D. Application of Decomposable Semi-Regenerative Processes to the Study of k-out-of-n Systems. Mathematics 2021, 9, 1933. https://doi.org/10.3390/math9161933
Rykov V, Ivanova N, Kozyrev D. Application of Decomposable Semi-Regenerative Processes to the Study of k-out-of-n Systems. Mathematics. 2021; 9(16):1933. https://doi.org/10.3390/math9161933
Chicago/Turabian StyleRykov, Vladimir, Nika Ivanova, and Dmitry Kozyrev. 2021. "Application of Decomposable Semi-Regenerative Processes to the Study of k-out-of-n Systems" Mathematics 9, no. 16: 1933. https://doi.org/10.3390/math9161933
APA StyleRykov, V., Ivanova, N., & Kozyrev, D. (2021). Application of Decomposable Semi-Regenerative Processes to the Study of k-out-of-n Systems. Mathematics, 9(16), 1933. https://doi.org/10.3390/math9161933