Computational Bifurcations Occurring on Red Fixed Components in the λ-Parameter Plane for a Family of Optimal Fourth-Order Multiple-Root Finders under the Möbius Conjugacy Map

Abstract
1. Introduction
2. Preliminary Results
- (a)
- The fixed point property remains invariant under a topological conjugacy h, that is,
- (b)
- The Poincaré characteristic multiplier [15] of ξ by, denoted by, is invariant under a diffeomorphic conjugacy h, that is,
- (1)
- If , then the bifurcation is of (cyclic) fold(saddle-node).
- (2)
- If , then the bifurcation is of flip(period-doubling).
- (3)
- If , then the bifurcation is of Neimark-Sacker(secondary Hopf),
3. Fixed and Critical Points under a Linear Fractional Möbius Conjugacy Map
- (a)
- Ifis a fixed point of, then so is.
- (b)
- Ifis a critical point of, then so is.
- (c)
- Relationholds for anyand any.
- (d)
- Relationholds for anyand any fixed pointof.
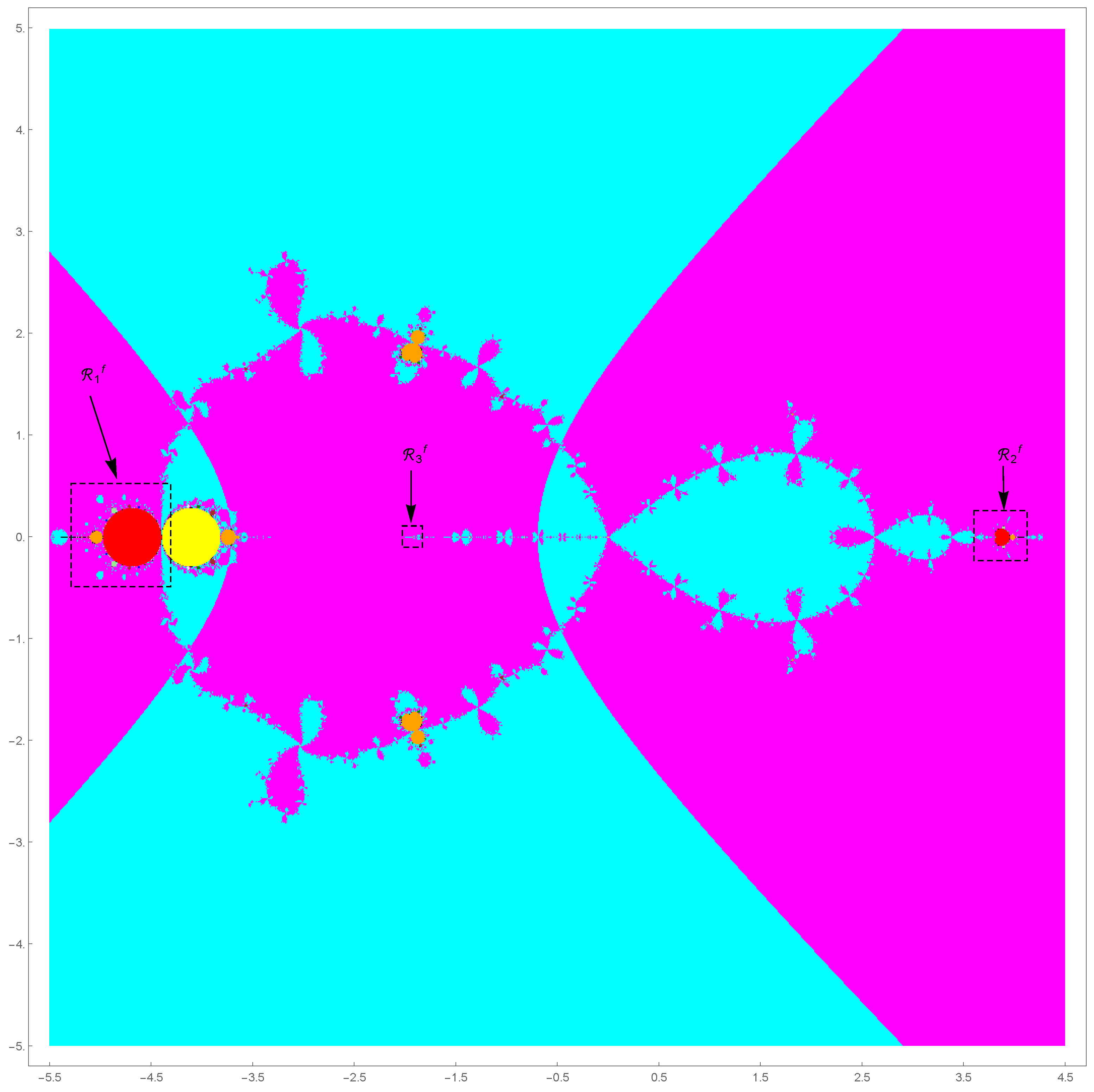
4. Long-Term Orbit Behavior with Bifurcation Phenomena in the Parameter Plane
4.1. Parameter Plane and Long-Term Orbit Behavior
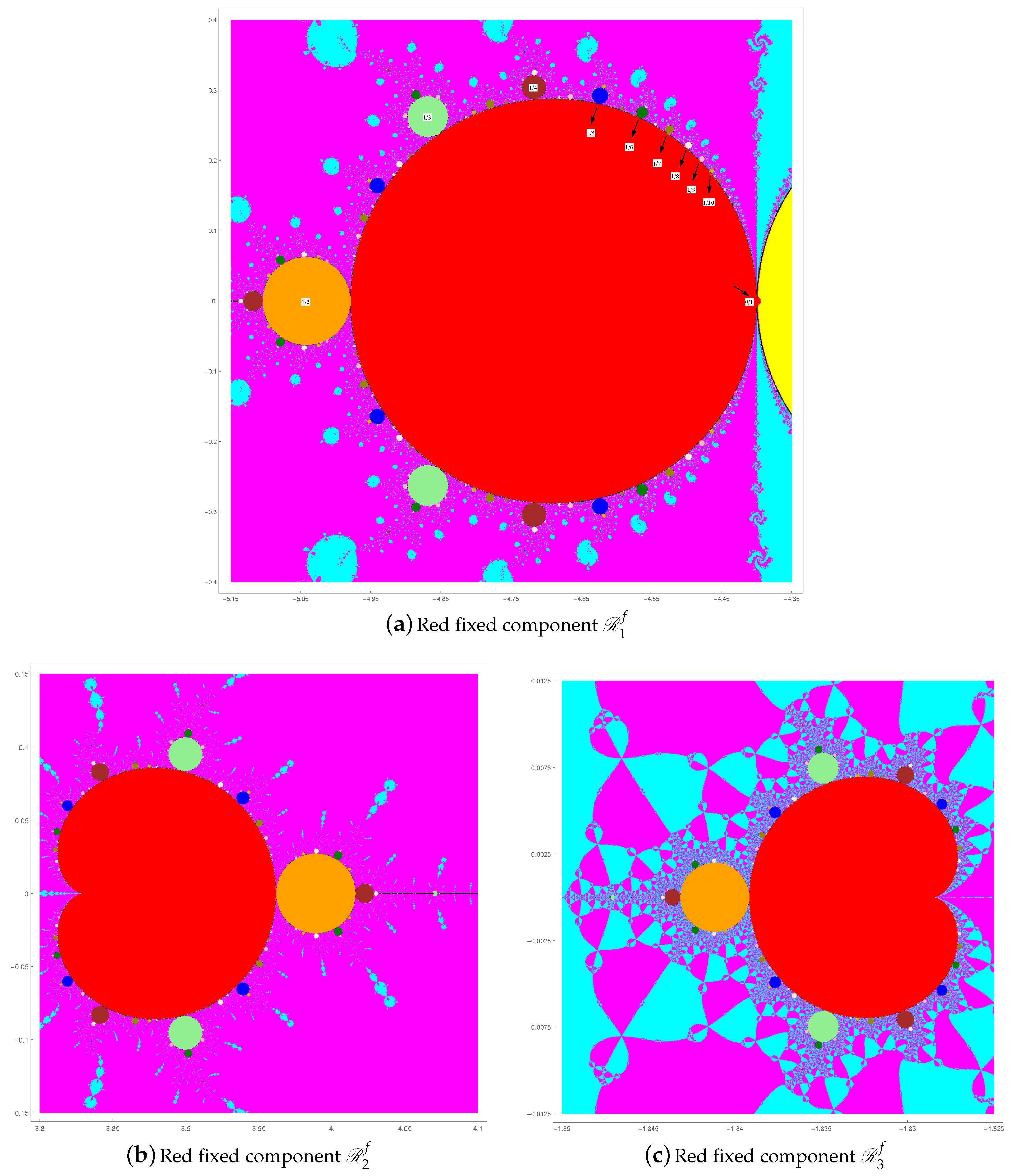
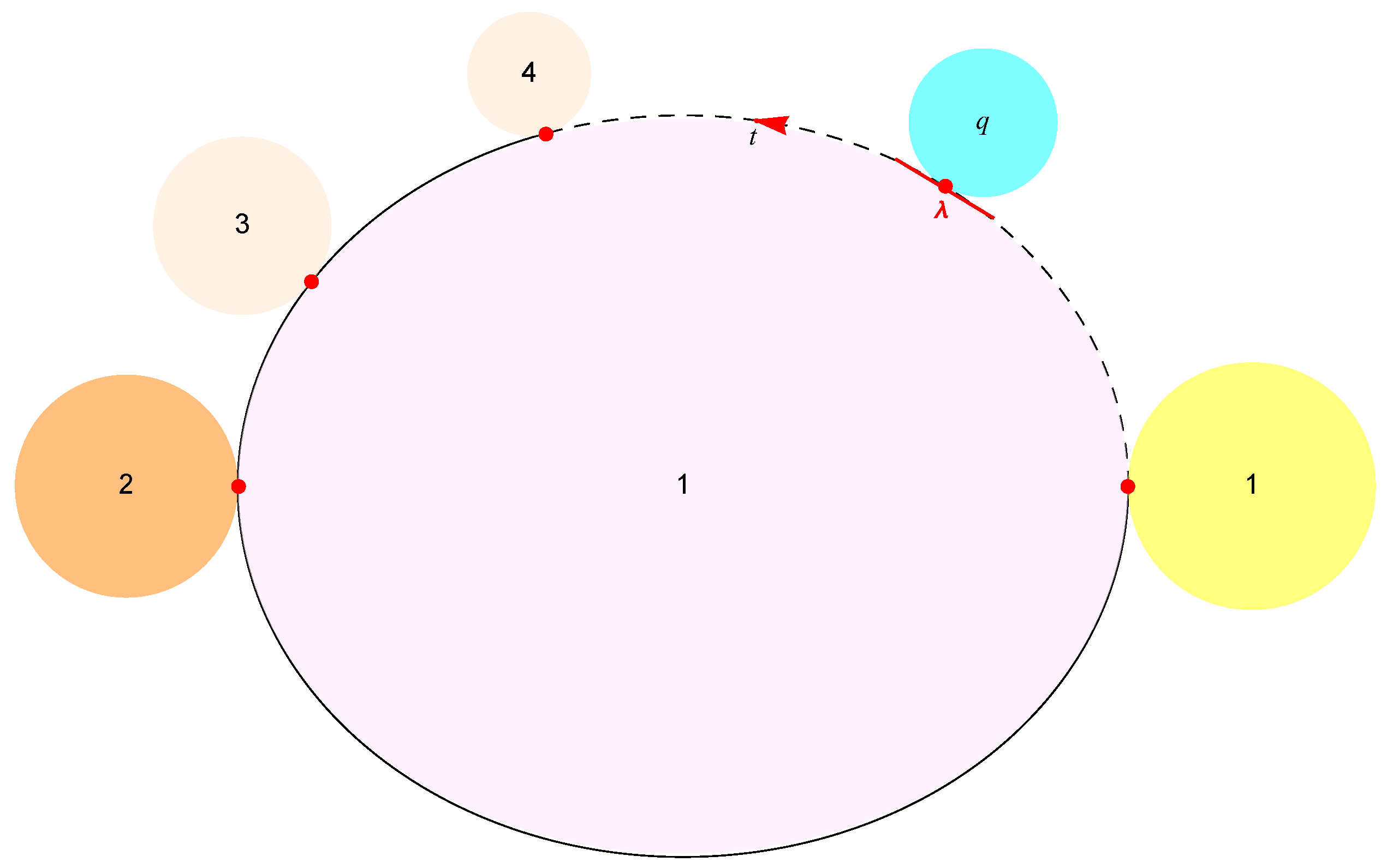
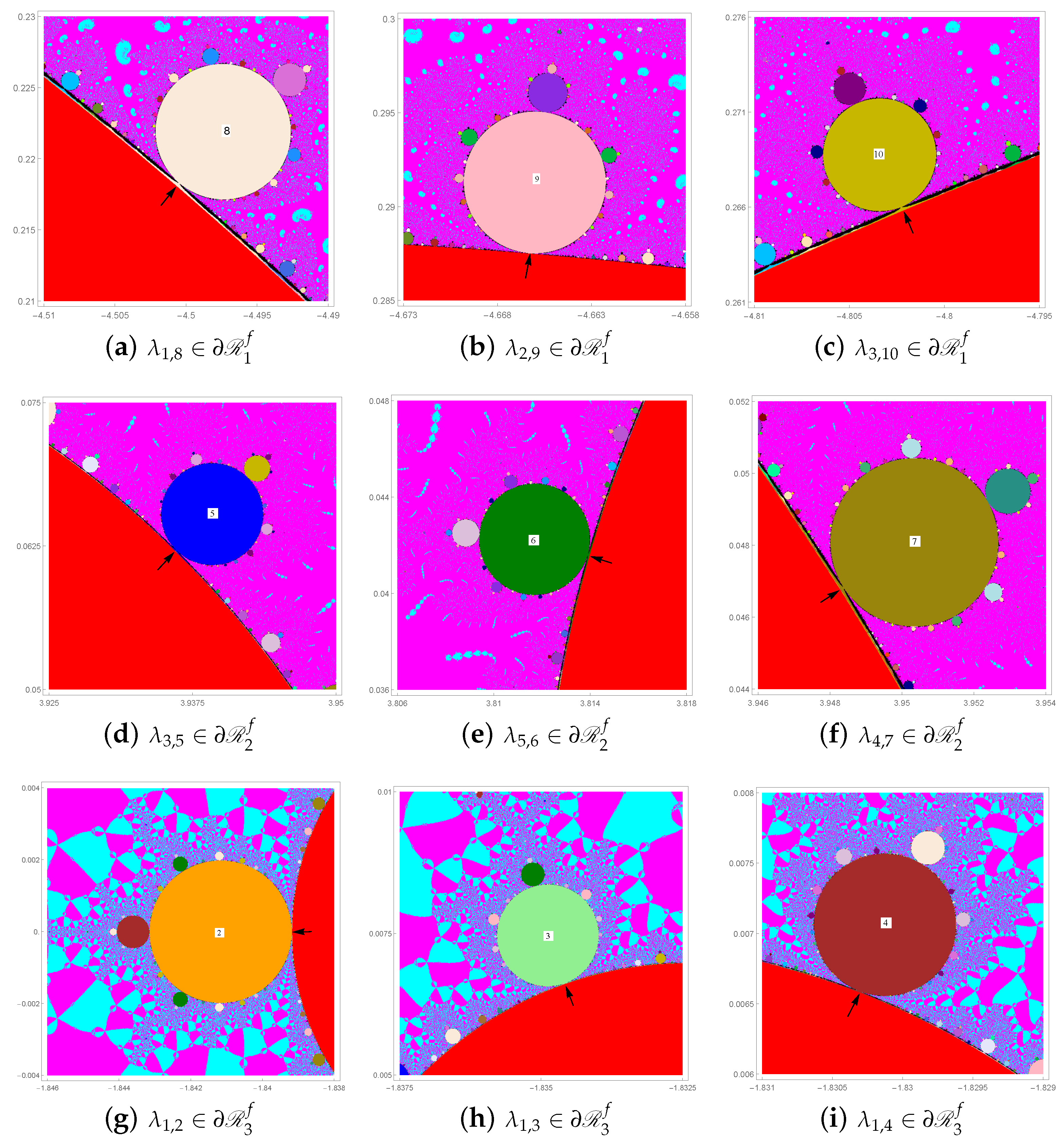
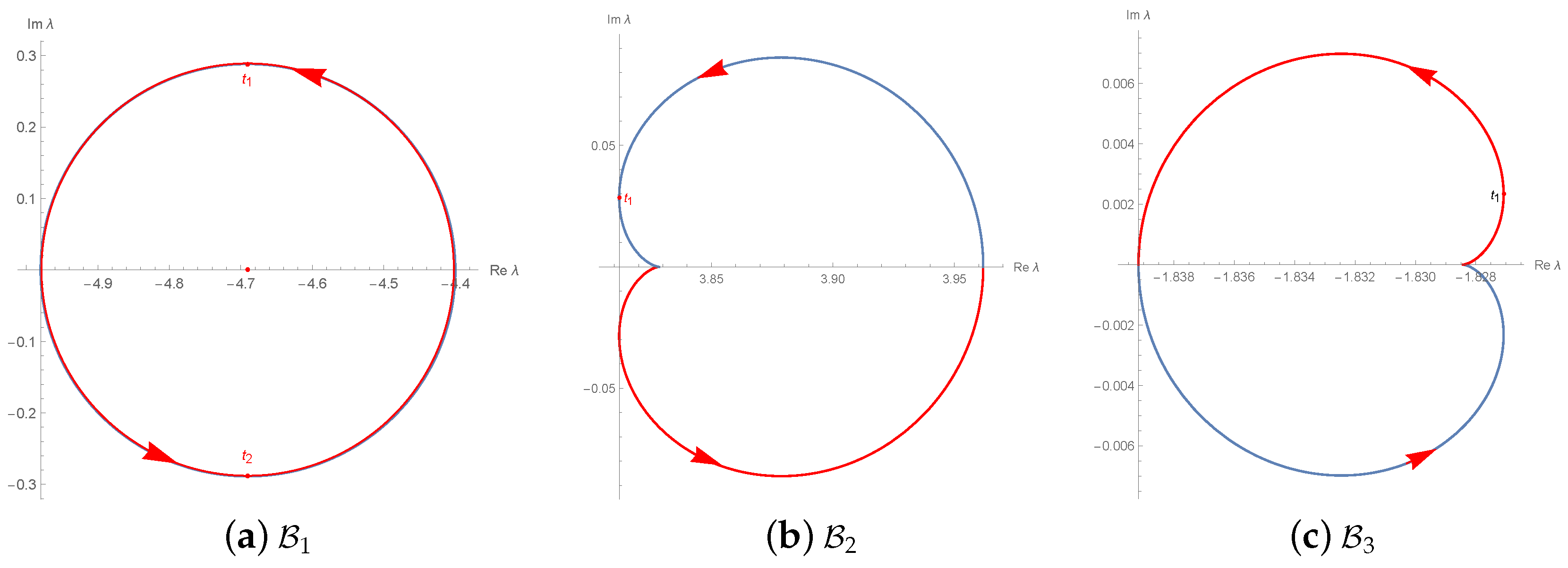
4.2. Bifurcation Points along a Red Fixed Component
5. Constructing Boundary Equations of Red Fixed Components
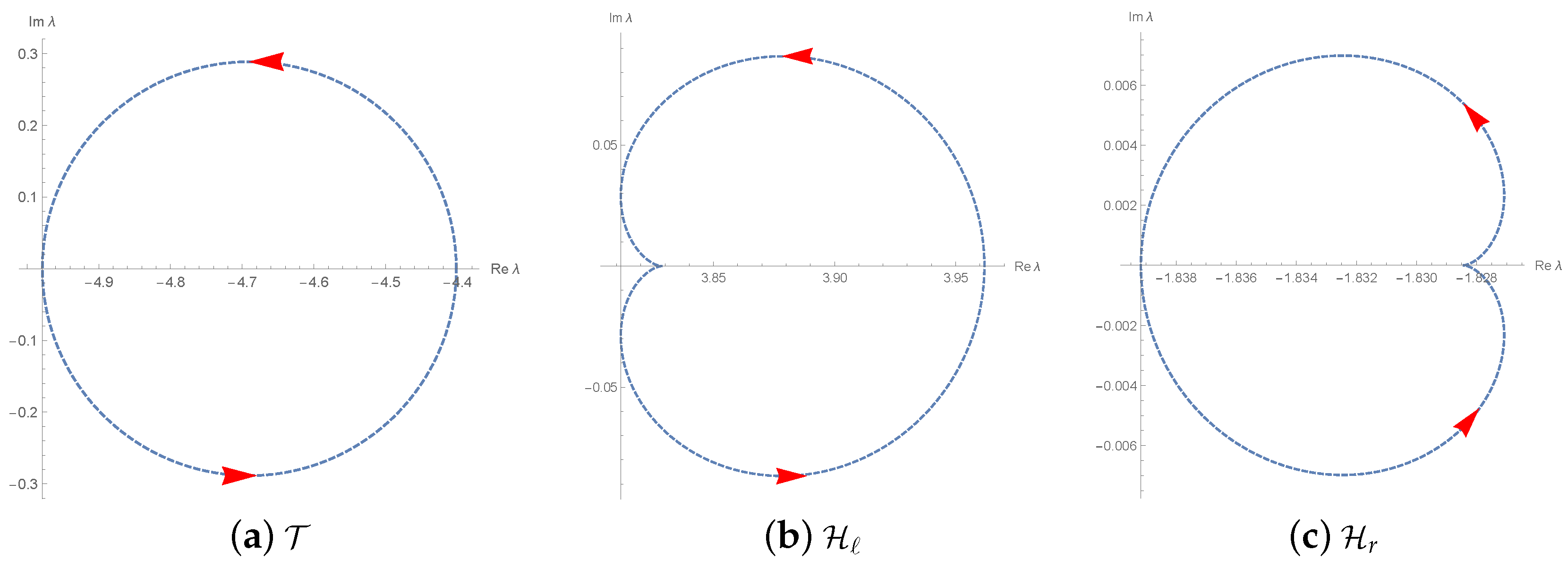
5.1. Establishing Parametric Equations of
5.2. Geometric Features of Boundaries
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Behl, R.; Cordero, A.; Motsa, S.; Torregrosa, J. On developing fourth-order optimal families of methods for multiple roots and their dynamics. Appl. Math. Comput. 2015, 265, 520–532. [Google Scholar] [CrossRef]
- Behl, R.; Cordero, A.; Motsa, S.; Torregrosa, J.; Kanwar, V. An optimal fourth-order family of methods for multiple roots and its dynamics. Numer. Algorithms 2016, 11, 775–796. [Google Scholar] [CrossRef]
- Geum, Y.H.; Kim, Y.I. A two-parameter family of fourth-order iterative methods with optimal convergence for multiple zeros. J. Appl. Math. 2013, 369067, 1–7. [Google Scholar]
- Neta, B.; Scott, M.; Chun, C. Basin attractors for various methods for multiple roots. Appl. Math. Comput. 2012, 218, 5043–5066. [Google Scholar] [CrossRef]
- Geiser, J. A multiple iterative splitting method for higher order differential equations. J. Math. Anal. Appl. 2015, 424, 1447–1470. [Google Scholar] [CrossRef]
- Hosseini, R.; Tatari, M. Some splitting methods for hyperbolic PDEs. Appl. Numer. Math. 2019, 146, 361–378. [Google Scholar] [CrossRef]
- Gao, J.; Liang, H.; Ma, S. Strong convergence of the semi-implicit Euler method for nonlinear stochastic Volterra integral equations with constant delay. Appl. Math. Comput. 2019, 348, 385–398. [Google Scholar] [CrossRef]
- González-Pinto, S.; Hernández-Abreu, D. Semi-implicit methods for differential systems with semi-stable equilibria. Appl. Numer. Math. 2006, 56, 210–221. [Google Scholar] [CrossRef]
- L-Jawary, M.A.A.; Azeez, M.M.; Radhi, G.H. Analytical and Numerical Solutions for the Nonlinear Burgers and Advection–Diffusion Equations by Using a Semi-Analytical Iterative Method. Comput. Math. Appl. 2018, 76, 155–171. [Google Scholar] [CrossRef]
- Campos, B.; Cordero, A.; Torregrosa, J.R.; Vindel, P. Orbits of period two in the family of a multipoint variant of Chebyshev-Halley family. Numer. Algorithms 2016, 73, 141–156. [Google Scholar] [CrossRef]
- Kung, H.T.; Traub, J.F. Optimal order of one-point and multipoint iteration. J. Assoc. Comput. Mach. 1974, 21, 643–651. [Google Scholar] [CrossRef]
- Ahlfors, L.V. Complex Analysis; McGraw-Hill Book, Inc.: New York, NY, USA, 1979. [Google Scholar]
- Geum, Y.H.; Kim, Y.I. Long-term orbit dynamics viewed through the yellow main component in the parameter space of a family of optimal fourth-order multiple-root finders. Discret. Contin. Dyn. Syst. Ser. B 2020, 22. [Google Scholar] [CrossRef]
- Hale, J.; Koçak, H. Dynamics and Bifurcations; Springer: New York, NY, USA, 1991. [Google Scholar]
- Thompson, J.M.T.; Stewart, H.B. Nonlinear Dynamics and Chaos; John Wieley & Sons Ltd.: New York, NY, USA, 1986. [Google Scholar]
- Carleson, L.; Gamelin, T.W. Complex Dynamics; Springer: New York, NY, USA, 1993. [Google Scholar]
- Peitgen, H.; Richter, P. The Beauty of Fractals; Springer: New York, NY, USA, 1986. [Google Scholar]
- Blanchard, P. The dynamics of Newton’s method. In Proceedings of Symposia in Applied Mathematics; American Mathematical Society: Providence, RI, USA, 1994; Volume 49, pp. 139–154. [Google Scholar]
- Beardon, A.F. Iteration of Rational Functions; Springer: New York, NY, USA, 1991. [Google Scholar]
- Lee, M.-Y.; Kim, Y.I. Bifurcations along the Boundary Curves of Red Fixed Components in the Parameter Space for Uniparametric, Jarratt-Type Simple-Root Finders. Mathematics 2020, 8, 51. [Google Scholar] [CrossRef]
- Devaney, R.L. An Introduction to Chaotic Dynamical Systems; Addison-Wesley Publishing Company, Inc.: New York, NY, USA, 1987. [Google Scholar]
- Nayfeh, A.H.; Balachandran, B. Applied Nonlinear Dynamics: Analytical, Computational, and Experimental Methods; John Wiley & Sons: New York, NY, USA, 2008. [Google Scholar]
- Argyros, I.K.; Magreñán, Á.A. On the convergence of an optimal fourth-order family of methods and its dynamics. Appl. Math. Comput. 2015, 252, 336–346. [Google Scholar] [CrossRef]
- Behl, R.; Cordero, A.; Motsa, S.; Torregrosa, J. Multiplicity anomalies of an optimal fourth-order class of iterative methods for solving nonlinear equations. Nonlinear Dyn. 2018, 91, 98–112. [Google Scholar] [CrossRef]
- Chun, C.; Neta, B.; Kim, S. On Jarratt’s family of optimal fourth-order iterative methods and their dynamics. Fractals 2014, 22, 1450013. [Google Scholar] [CrossRef]
- García-Olívo, M.; Gutíerrez, J.M.; Magreñán, Á.A. A complex dynamical approach of Chebyshev’s method. SeMA J. 2015, 71, 57–68. [Google Scholar] [CrossRef]
- Magreñán, Á.A. Different anomalies in a Jarratt family of iterative root-finding methods. Appl. Math. Comput. 2014, 233, 29–38. [Google Scholar]
- Chicharro, F.; Cordero, A.; Torregrosa, J.R. Drawing Dynamical and Parameters Planes of Iterative Families and Methods. Sci. World J. 2013, 2013, 1–11. [Google Scholar] [CrossRef]
- Geum, Y.H.; Kim, Y.I.; Magreñán, Á.A. A study of dynamics via Mobius conjugacy map on a family of sixth-order modified Newton-like multiple-zero finders with bivariate polynomial weight functions. J. Comput. Appl. Math. 2018, 344, 608–623. [Google Scholar] [CrossRef]
- Ainsworth, J.; Dawson, M.; Pianta, J.; Warwick, J. The Farey Sequence. 2012. Available online: http://www.maths.ed.ac.uk/~aar/fareyproject.pdf (accessed on 24 January 2020).
- Geum, Y.H.; Kim, Y.I. On Locating and Counting Satellite Components Born along the Stability Circle in the Parameter Space for a Family of Jarratt-Like Iterative Methods. Mathematics 2019, 7, 839. [Google Scholar] [CrossRef]
- Wolfram, S. The Mathematica Book, 5th ed.; Wolfram Media: Champaign, IL, USA, 2003. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ℓ | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| q | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 1 | −4.4 | |||||||||
| 2 | −4.97983 | |||||||||
| 3 | ||||||||||
| 4 | ||||||||||
| 5 | ||||||||||
| 6 | ||||||||||
| 7 | ||||||||||
| 8 | ||||||||||
| 9 | ||||||||||
| 10 | ||||||||||
| ℓ | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| q | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 1 | 3.82843 | |||||||||
| 2 | 3.96186 | |||||||||
| 3 | ||||||||||
| 4 | ||||||||||
| 5 | ||||||||||
| 6 | ||||||||||
| 7 | ||||||||||
| 8 | ||||||||||
| 9 | ||||||||||
| 10 | ||||||||||
| ℓ | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| q | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 1 | −1.82843 | |||||||||
| 2 | −1.83917 | |||||||||
| 3 | ||||||||||
| 4 | ||||||||||
| 5 | ||||||||||
| 6 | ||||||||||
| 7 | ||||||||||
| 8 | ||||||||||
| 9 | ||||||||||
| 10 | ||||||||||
| GP | : | : | : Curvature | ||||||
|---|---|---|---|---|---|---|---|---|---|
| PC | Bounding Area | Perimeter | |||||||
| 0.2627330688 | 1.8170393896 | 3.44989 | 3.43720 | 3.43430 | 3.4522 | 3.46289 | 3.44730 | ||
| 0.2614338703 | 1.8125327322 | 3.46652 | 3.46652 | 3.46652 | 3.46652 | 3.46652 | 3.46652 | ||
| 0.02081236148 | 0.5312573924 | 24.98557 | 19.53529 | 14.53345 | 12.47003 | 11.92695 | 16.69026 | ||
| 0.02097440675 | 0.5337209668 | 12.16806 | 12.98094 | 15.89834 | 22.48365 | 29.37631 | 18.58150 | ||
| 0.0001361263636 | 0.04299949400 | 289.93697 | 229.64877 | 174.87643 | 152.23274 | 146.18980 | 198.57694 | ||
| 0.0001360364744 | 0.04298303774 | 364.76611 | 279.17989 | 197.40999 | 161.18458 | 151.09107 | 230.72633 | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Geum, Y.H.; Kim, Y.I. Computational Bifurcations Occurring on Red Fixed Components in the λ-Parameter Plane for a Family of Optimal Fourth-Order Multiple-Root Finders under the Möbius Conjugacy Map. Mathematics 2020, 8, 763. https://doi.org/10.3390/math8050763
Geum YH, Kim YI. Computational Bifurcations Occurring on Red Fixed Components in the λ-Parameter Plane for a Family of Optimal Fourth-Order Multiple-Root Finders under the Möbius Conjugacy Map. Mathematics. 2020; 8(5):763. https://doi.org/10.3390/math8050763
Chicago/Turabian StyleGeum, Young Hee, and Young Ik Kim. 2020. "Computational Bifurcations Occurring on Red Fixed Components in the λ-Parameter Plane for a Family of Optimal Fourth-Order Multiple-Root Finders under the Möbius Conjugacy Map" Mathematics 8, no. 5: 763. https://doi.org/10.3390/math8050763
APA StyleGeum, Y. H., & Kim, Y. I. (2020). Computational Bifurcations Occurring on Red Fixed Components in the λ-Parameter Plane for a Family of Optimal Fourth-Order Multiple-Root Finders under the Möbius Conjugacy Map. Mathematics, 8(5), 763. https://doi.org/10.3390/math8050763