Meshless Analysis of Nonlocal Boundary Value Problems in Anisotropic and Inhomogeneous Media

 , ,
, ,  and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Governing Equation
- Classical Dirichlet boundary conditions:
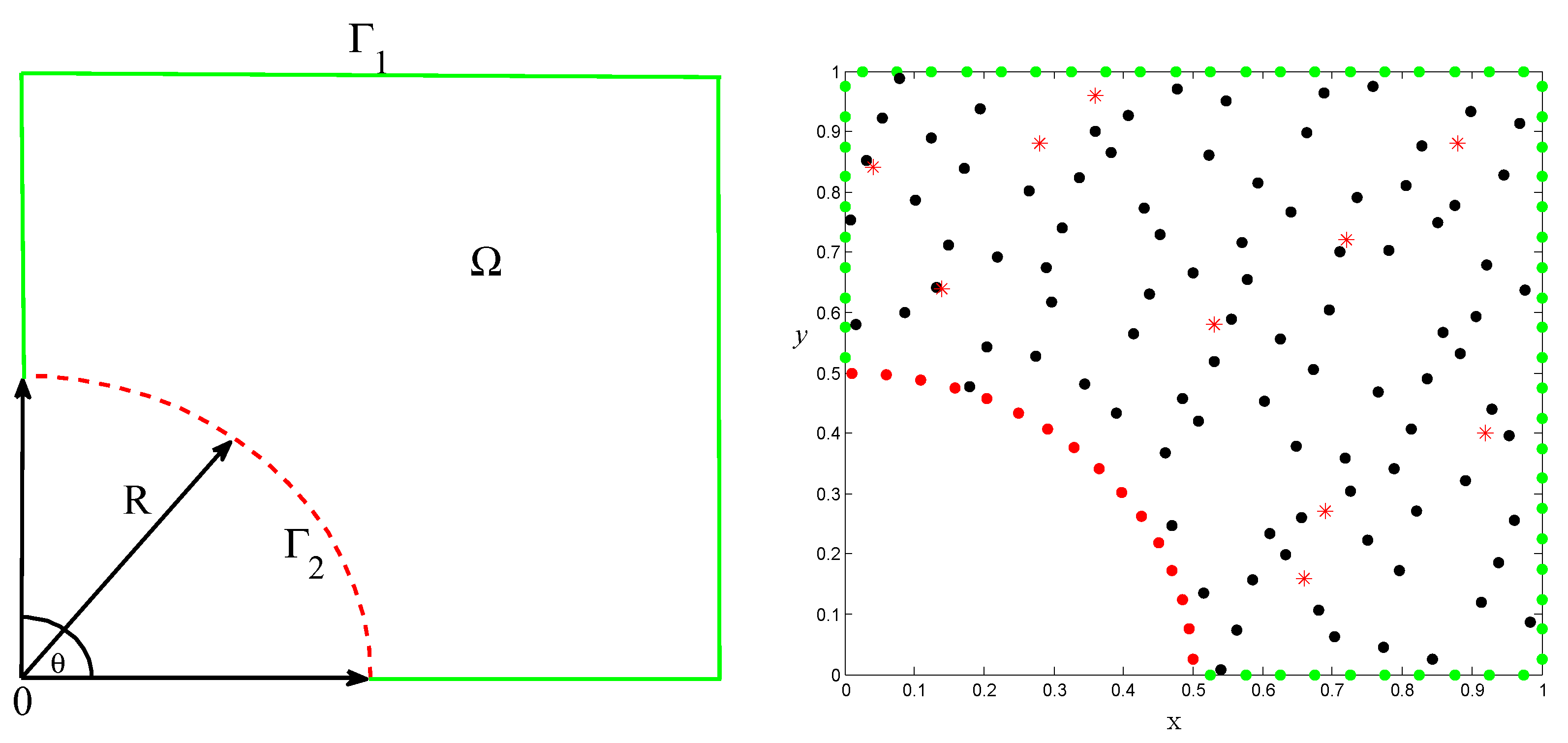
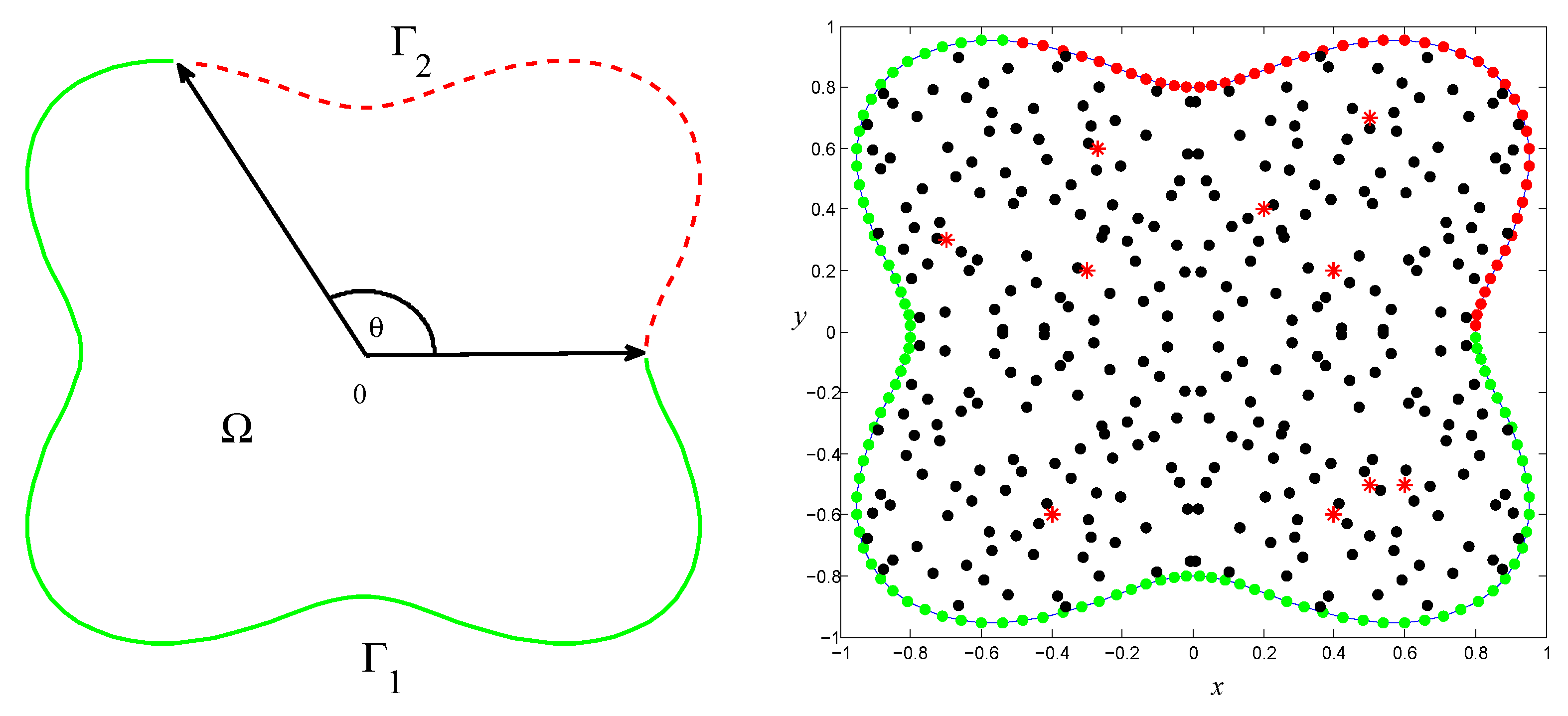
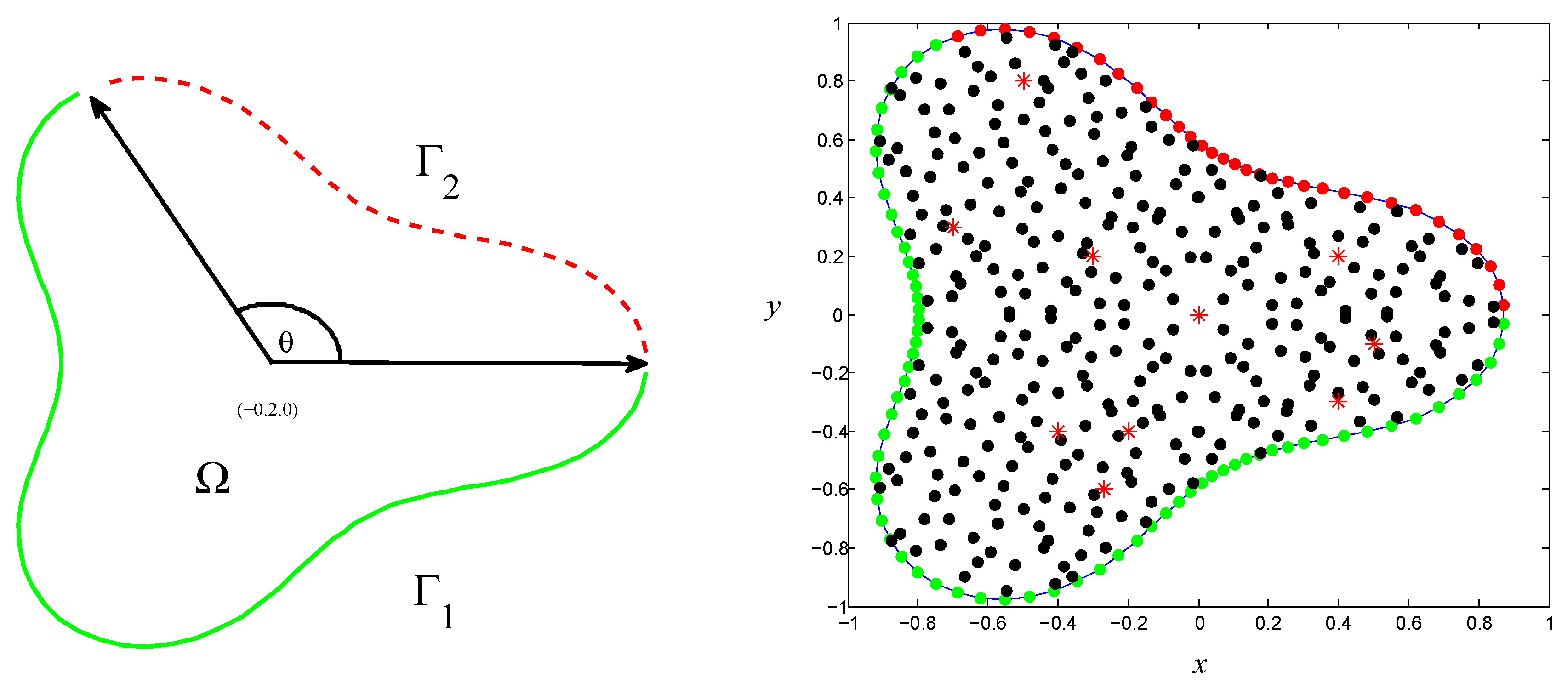
- • Nonlocal multipoint boundary conditions:where are set of discrete distinct scattered points inside the solution domain and n is the number of these scattered points. Throughout the paper we will take ; if not, it will be mentioned. It is also assumed that the distribution of the points on the solution domain will be fixed. The given functions are , , , f, g, h, and the parameter . is the interior portion of the solution domain and are the boundary parts of the solution domain such that and . The NBC defined on the boundary is reduced to Dirichlet boundary condition when .
3. The Numerical Scheme
Integrated MQ RBF
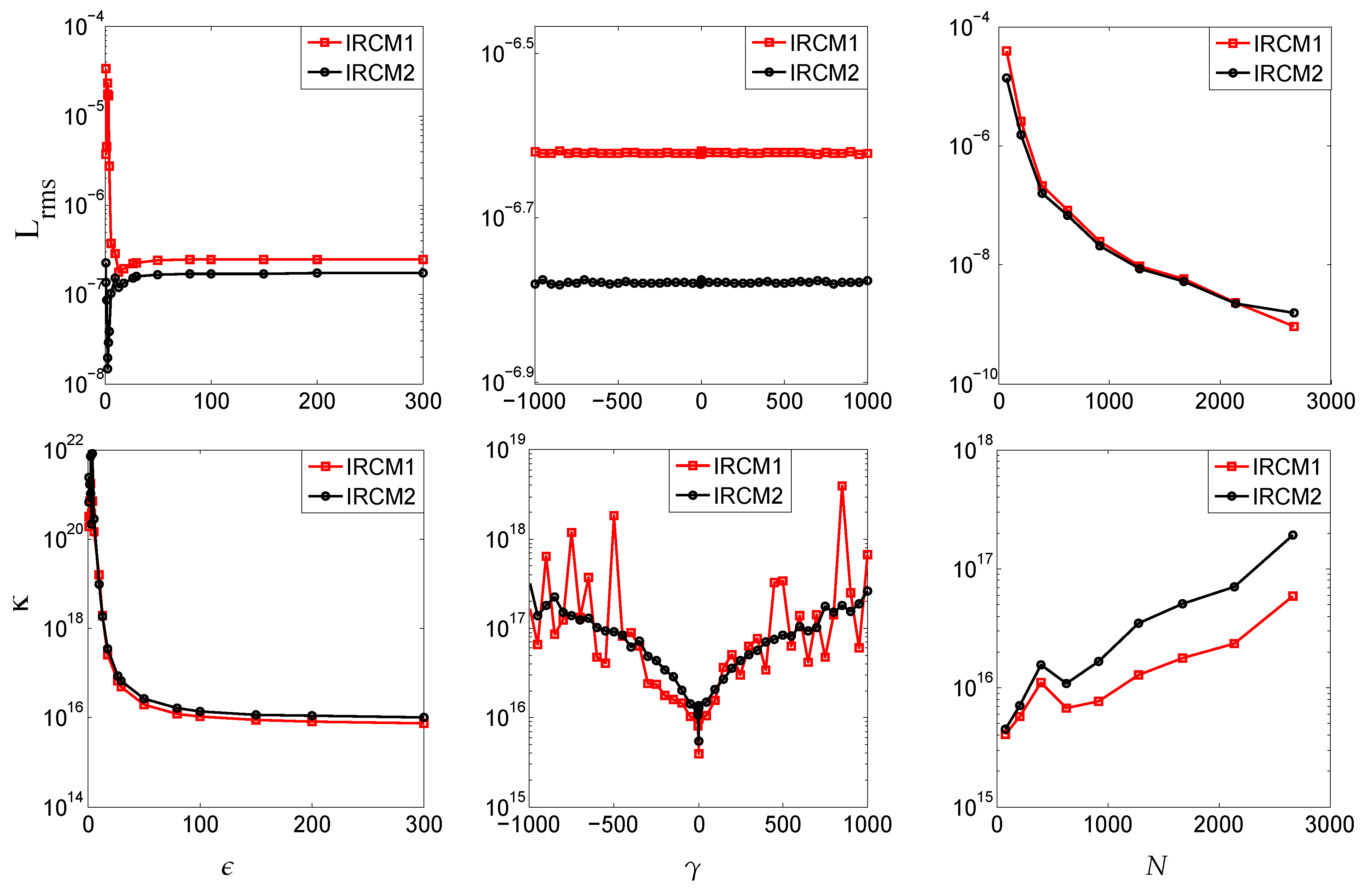
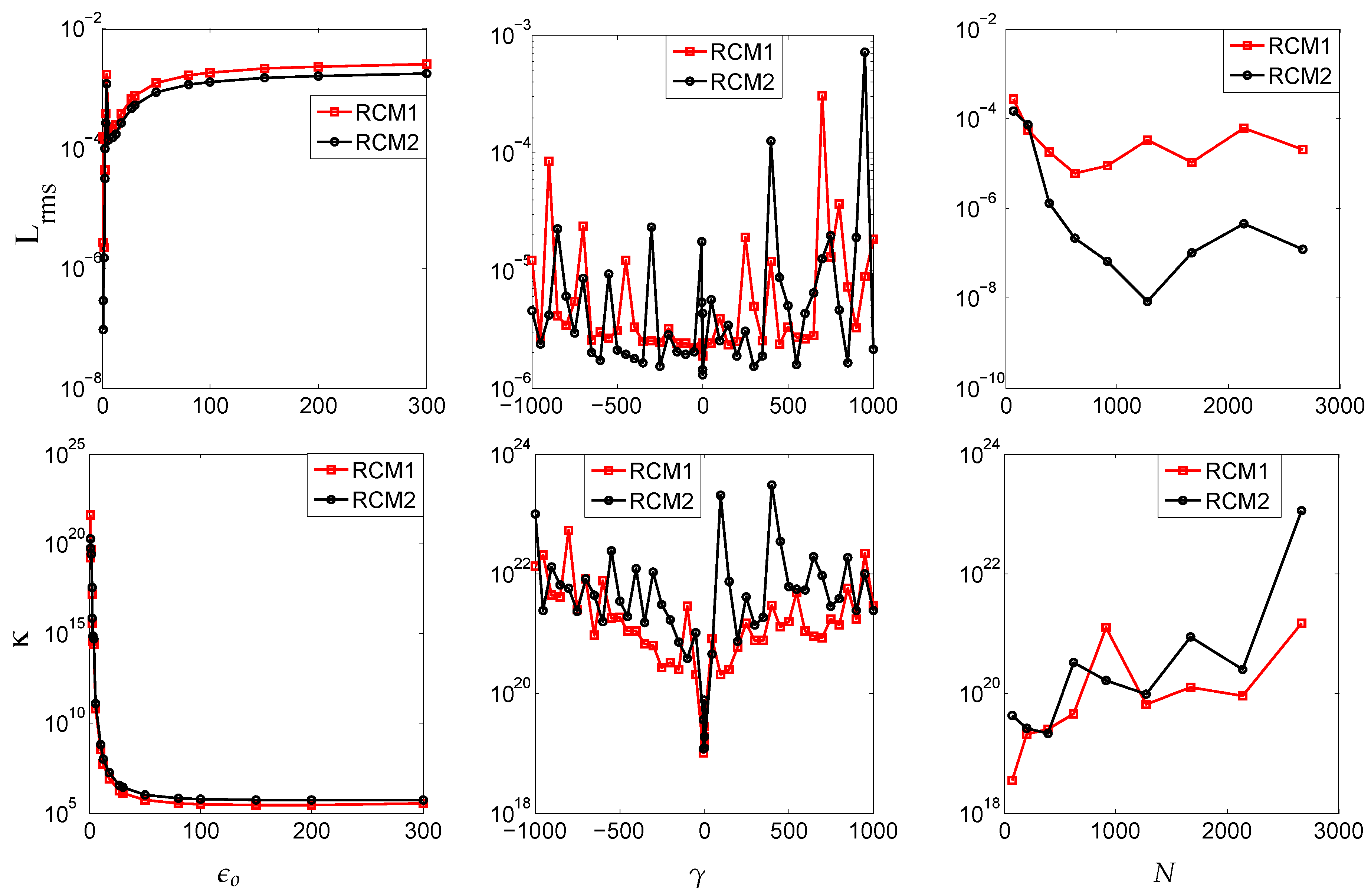
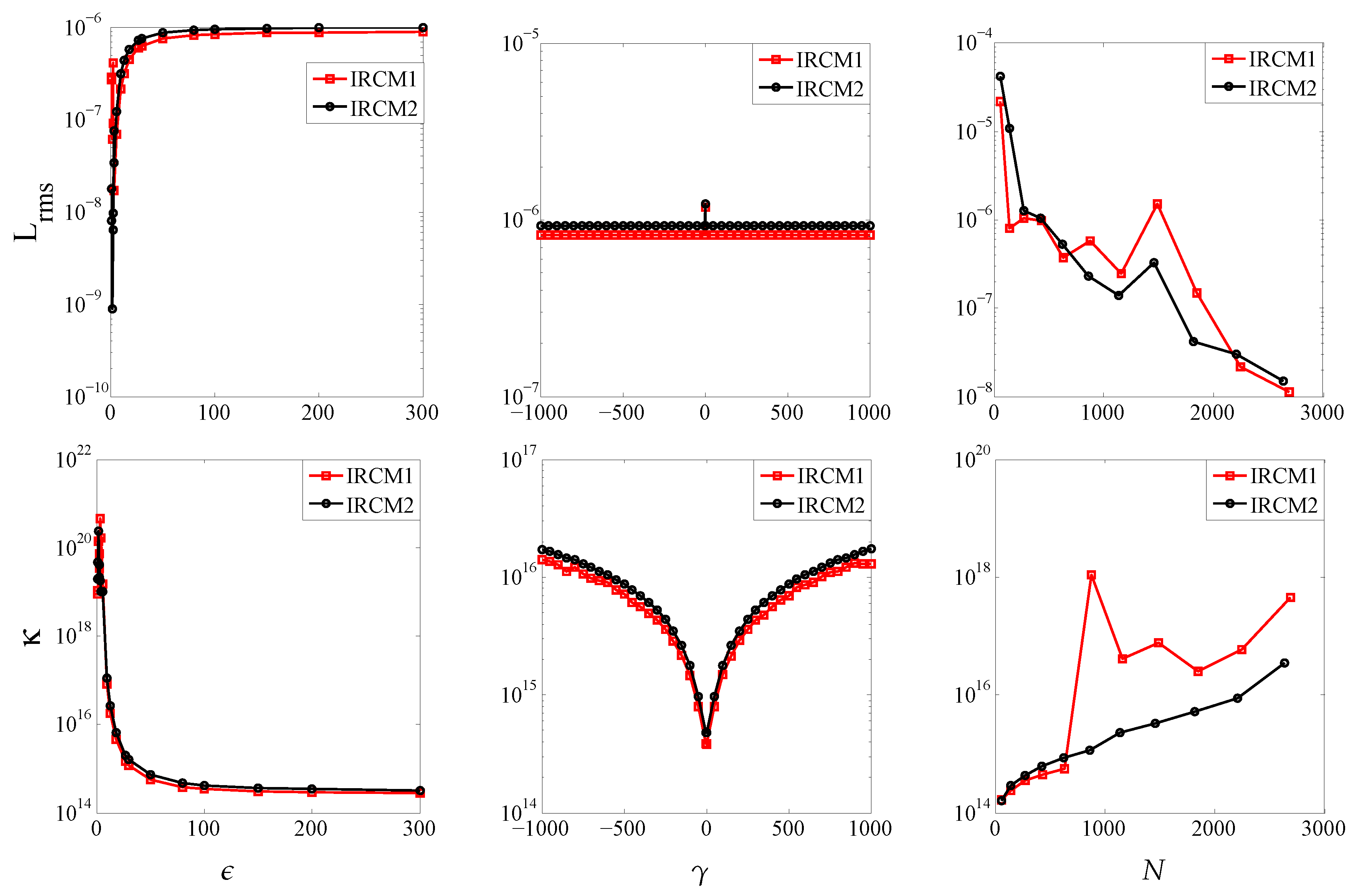
4. Numerical Experiments
- R =(Dim), creates a Halton set on dimension Dim;
- O =(R,’RR2’) gives a duplicate set, and RR2 is a scramble type;
- X =(O,M) generates a matrix containing the first M points in dimensions Dim from the point set O.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| PDEs | partial differential equation equations |
| ODEs | ordinary differential equation equations |
| NMBC | nonlocal multipoint boundary conditions |
| NBC | nonlocal boundary conditions |
| coefficients of the diffusion equation | |
| RBFs | radial basis functions |
| MQ | multi-quadric |
| GMM | global meshless method |
| LMM | local meshless method |
| N | number of collocation points |
| number of collocation points along x-axis | |
| number of collocation points along y-axis | |
| shape parameter | |
| computational domain | |
| set of scattered nodes inside | |
| set of scattered nodes in which is subset of | |
| boundary of the domain | |
| set of scattered nodes on multi-point boundary | |
| set of scattered nodes on Dirichlet boundary | |
| absolute maximum error | |
| nonlocality parameter | |
| f, g and h | given known functions |
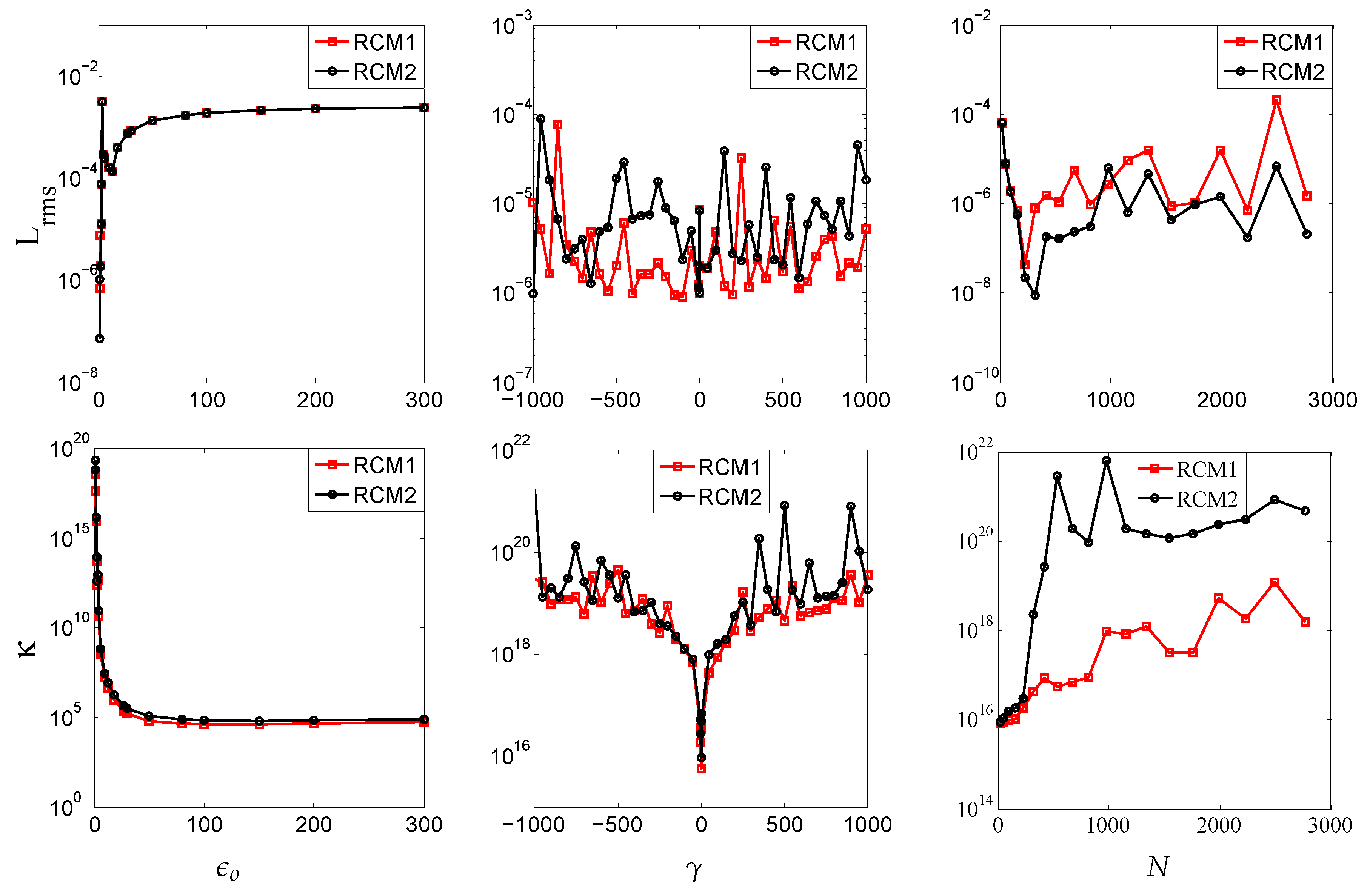
| RCM2 | Kansa’s radial basis function based on mulitquadric |
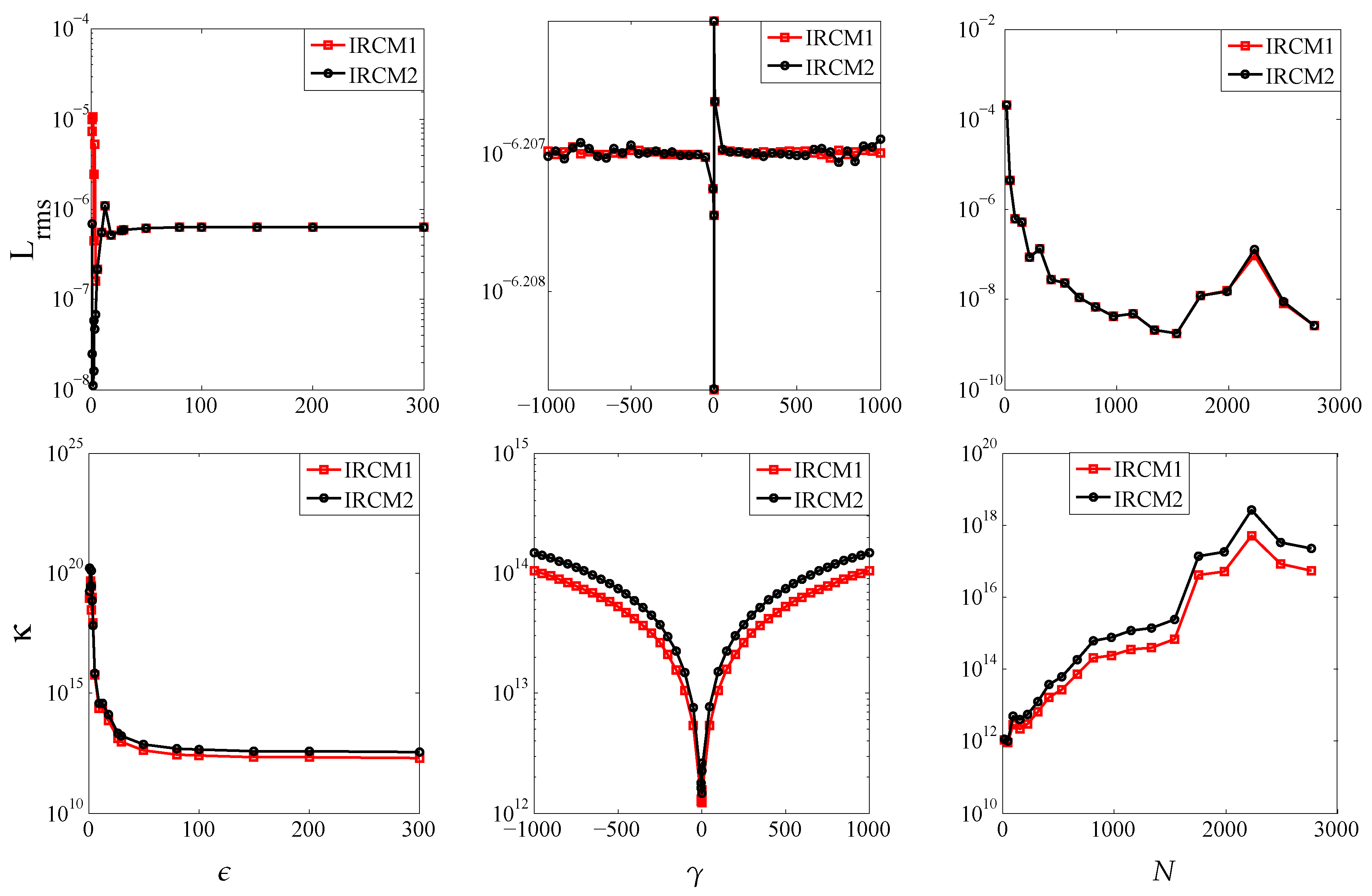
| IRCM2 | Kansa’s radial basis function based on integrated Mulitquadric |
| RCM1 | radial basis function based on mulitquadric |
| IRCM1 | radial basis function based on integrated Mulitquadric |
References
- Chen, C.K.; Fife, P. Nonlocal models of phase transitions in solids. Adv. Math. Sci. Appl. 2000, 10, 821–849. [Google Scholar]
- Lacey, A. Thermal runaway in a non-local problem modelling ohmic heating. part ii: General proof of blow-up and asymptotics of runaway. Eur. J. Appl. Math. 1995, 6, 201–224. [Google Scholar] [CrossRef]
- Bebernes, J.; Talaga, P. Nonlocal problems modelling shear banding. Commun. Appl. Nonlinear Anal. 1996, 3, 79–103. [Google Scholar]
- Bebernes, J.; Li, C.; Talaga, P. Single-point blowup for nonlocal parabolic problems. Phys. D Nonlinear Phenom. 1999, 134, 48–60. [Google Scholar] [CrossRef]
- Lacey, A. Mathematical analysis of thermal runaway for spatially inhomogeneous reactions. SIAM J. Appl. Math. 1983, 43, 1350–1366. [Google Scholar] [CrossRef]
- Caglioti, E.; Lions, P.L.; Marchioro, C.; Pulvirenti, M. A special class of stationary flows for two-dimensional euler equations: A statistical mechanics description. Commun. Math. Phys. 1992, 143, 501–525. [Google Scholar] [CrossRef]
- Furter, J.; Grinfeld, M. Local vs. non-local interactions in population dynamics. J. Math. Biol. 1989, 27, 65–80. [Google Scholar] [CrossRef]
- Wolansky, G. A critical parabolic estimate and application to nonlocal equations arising in chemotaxis. Appl. Anal. 1997, 66, 291–321. [Google Scholar] [CrossRef]
- Gilboa, G.; Osher, S. Nonlocal operators with applications to image processing. Multiscale Model. Simul. 2009, 7, 1005–1028. [Google Scholar] [CrossRef]
- Dehghan, M. Efficient techniques for the second-order parabolic equation subject to nonlocal specifications. Appl. Numer. Math. 2005, 52, 39–62. [Google Scholar] [CrossRef]
- Aziz, I.; Ahmad, M. Numerical solution of two-dimensional elliptic PDEs with nonlocal boundary conditions. Comput. Math. Appl. 2015, 69, 180–205. [Google Scholar] [CrossRef]
- Ma, R. A survey on nonlocal boundary value problems. Appl. Math. E-Notes 2007, 7, 257–279. [Google Scholar]
- Eziani, D.G.; Shvili, G.A. Investigation of the nonlocal initial boundary value problems for some hyperbolic equations. Hiroshima Math. J. 2001, 31, 345–366. [Google Scholar]
- Berikelashvili, G.; Khomeriki, N. On a numerical solution of one nonlocal boundary-value problem with mixed dirichlet–neumann conditions. Lith. Math. J. 2013, 53, 367–380. [Google Scholar] [CrossRef]
- Mollapourasl, R. An efficient numerical scheme for a nonlinear integro-differential equations with an integral boundary condition. Appl. Math. Comput. 2014, 248, 8–17. [Google Scholar] [CrossRef]
- Fasshauer, G. Meshfree Approximation Methods With Matlab; World Scientific Publishing Co. Pte. Ltd.: Singapore, 2007; Volume 6. [Google Scholar]
- Sarra, S. Integrated multiquadric radial basis function approximation methods. Comput. Math. Appl. 2006, 51, 1283–1296. [Google Scholar] [CrossRef]
- Hardy, R. Multiquadratic equations for topography and other irregular surfaces. J. Geophys. Res. 1971, 76, 1905–1915. [Google Scholar] [CrossRef]
- Franke, R. Scattered data interpolation tests of some methods. Math. Comput. 1982, 38, 181–200. [Google Scholar] [CrossRef]
- Fasshauer, G. Newton iteration with multiquadratics for the solution of nonlinear PDEs. Comput. Math. Appl. 2002, 43, 423–438. [Google Scholar] [CrossRef]
- Wang, J.; Liu, G. On the optimal shape parameters of radial basis functions used for 2-D meshless methods. Comput. Methods Appl. Mech. Eng. 2002, 191, 2611–2630. [Google Scholar] [CrossRef]
- Ballestra, L.; Pacelli, G. Computing the survival probability density function in jump-diffusion models: A new approach based on radial basis functions. Eng. Anal. Bound. Elem. 2011, 35, 1075–1084. [Google Scholar] [CrossRef]
- Ballestra, L.; Pacelli, G. Pricing European and American options with two stochastic factors: A highly efficient radial basis function approach. J. Econ. Dyn. Control 2013, 37, 1142–1167. [Google Scholar] [CrossRef]
- Luh, L. The shape parameter in the Gaussian function. Comput. Math. Appl. 2012, 63, 453–461. [Google Scholar] [CrossRef]
- Davydov, O.; Oanh, D. On the optimal shape parameter for Gaussian radial basis function finite difference approximation of the Poisson equation. Comput. Math. Appl. 2001, 62, 27–49. [Google Scholar] [CrossRef]
- Cheng, A. Multiquadric and its shape parameter—A numerical investigation of error estimate, condition number, and round-off error by arbitrary precision computation. Eng. Anal. Bound. Elem. 2012, 36, 220–239. [Google Scholar] [CrossRef]
- Huang, C.; Yen, H.; Cheng, A. On the increasingly flat radial basis function and optimal shape parameter for the solution of elliptic PDEs. Eng. Anal. Bound. Elem. 2010, 34, 802–809. [Google Scholar] [CrossRef]
- Scheuerer, M. An alternative procedure for selecting a good value for the parameter c in RBF-interpolation. Adv. Comput. Math. 2011, 34, 105–126. [Google Scholar] [CrossRef]
- Uddin, M. On the selection of a good value of shape parameter in solving time-dependent partial differential equations using RBF approximation method. Appl. Math. Model. 2014, 38, 135–144. [Google Scholar] [CrossRef]
- Esmaeilbeigi, M.; Hosseini, M. A new approach based on the genetic algorithm for finding a good shape parameter in solving partial differential equations by Kansa’s method. Appl. Math. Comput. 2014, 249, 419–428. [Google Scholar] [CrossRef]
- Kazem, S.; Hadinejad, F. Promethee technique to select the best radial basis functions for solving the 2-dimensional heat equations based on hermite interpolation. Eng. Anal. Bound. Elem. 2015, 50, 29–38. [Google Scholar] [CrossRef]
- Golbabi, A.; Mohebianfar, E.; Rabiei, H. On the new variable shape parameter strategies for radial basis functions. Comput. Appl. Math. 2015, 34, 691–704. [Google Scholar] [CrossRef]
- Kadalbajoo, M.; Kumar, A.; Tripathi, L. A radial basis functions based finite differences method for wave equation with an integral condition. Appl. Math. Comput. 2015, 238, 8–16. [Google Scholar] [CrossRef]
- Yan, L.; Yang, F. The method of approximate particular solutions for the time-fractional diffusion equation with non-local boundary condition. Comput. Math. Appl. 2015, 70, 2716–2732. [Google Scholar] [CrossRef]
- Dehghan, M.; Tatari, M. On the solution of the non-local parabolic partial differential equations via radial basis functions. Appl. Math. Model. 2009, 52, 461–477. [Google Scholar]
- Dehghan, M.; Shokri, A. A meshless method for numerical solution of the one-dimensional wave equation with an integral conditions using radial basis functions. Numer. Algorithms 2009, 52, 461–477. [Google Scholar] [CrossRef]
- Kazem, S.; Rad, J. Radial basis functions method for solving of a non-local boundary value problem with neumann’s boundary conditions. Appl. Math. Model. 2012, 36, 2360–2369. [Google Scholar] [CrossRef]
- Sajavicius, S. Optimization, conditioning and accuracy of radial basis function method for partial differential equations with nonlocal boundary conditions—A case of two-dimensional poisson equation. Eng. Anal. Bound. Elem. 2013, 37, 788–804. [Google Scholar] [CrossRef]
- Sajavicius, S. Radial basis function method for a multidimensional linear elliptic equation with nonlocal boundary conditions. Comput. Math. Appl. 2014, 87, 1407–1420. [Google Scholar] [CrossRef]
- Sajavicius, S. Radial basis function collocation method for an elliptic problem with nonlocal multipoint boundary condition. Eng. Anal. Bound. Elem. 2016, 67, 164–172. [Google Scholar] [CrossRef]
- Siraj-ul-Islm; Ahmad, M. Meshless analysis of elliptic interface boundary value problems. Eng. Anal. Bound. Elem. 2018, 92, 38–49. [Google Scholar] [CrossRef]
- Ahmad, M.; Siraj-ul-Islm. Meshless analysis of parabolic interface problems. Eng. Anal. Bound. Elem. 2018, 94, 134–152. [Google Scholar]
- Ahmad, M.; Siraj-ul-Islm; Larsson, E. Local meshless methods for second order elliptic interface problems with sharp corners. J. Comput. Phys. 2020, 416, 109500. [Google Scholar]
- Zaheer-ud-Din; Siraj-ul-Islam; Mati ur Rahman. Oscillatory discontinuous kernel based meshless technique of Fredholm integral equation. In Proceedings of the International Conference on Applied and Engineering Mathematics (ICAEM), Taxila, Pakistan, 4–5 September 2018; pp. 53–55. [Google Scholar]
- Zaheer-ud-Din; Siraj-ul-Islam. RBF Solution Method for 1D Oscillatory Fredholm Integral Equations Having Kernel Function Free-of-Stationary-Points. In Proceedings of the 14th Regional Conference on Mathematical Physics, Islamabad, Pakistan, 9–14 November 2015; World Scientific Publishing Co. Pte. Ltd.: Singapore, 2017; pp. 284–292. [Google Scholar]
- Zaheer-ud-Din; Siraj-ul-Islam. Kernel-based meshless approximation of one-dimensional oscillatory Fredholm integral equations. FILOMAT 2020, 34, 3:5743–5753. [Google Scholar]
- Siraj-ul-Islam; Aziz, I.; Zaheer-ud-Din. Meshless methods for multivariate highly oscillatory Fredholm integral equations. Eng. Anal. Bound. Elem. 2015, 53, 100–112. [Google Scholar]
- Zaheer-ud-Din; Siraj-ul-Islam. Meshless methods for one-dimensional oscillatory Fredholm integral equations. Appl. Math. Comput. 2018, 324, 156–173. [Google Scholar]
- Siraj-ul-Islam; Zaheer-ud-Din. Meshless methods for two-dimensional oscillatory Fredholm integral equations. J. Comput. Appl. Math. 2018, 335, 33–50. [Google Scholar] [CrossRef]
- Ahmad, M.; Siraj-ul-Islam; Ullah, B. Local radial basis function collocation method for stokes equations with interface conditions. Eng. Anal. Bound. Elem. 2020, 119, 246–256. [Google Scholar]
- Ahmad, I.; Ahsan, M.; Zaheer-ud-Din; Masood, A.; Kumam, P. An efficient local formulation for time–dependent PDEs. Mathematics 2019, 7, 216. [Google Scholar]
- Ling, L.; Trummer, M. Multiquadric collocation method with integral formulation for boundary layer problems. Comput. Math. Appl. 2004, 48, 927–941. [Google Scholar]
- Mai-Duy, N.; Tran-Cong, T. A multidomain integrated radial basis function collocation method for elliptic problems. Appl. Math. Model. 2003, 27, 197–220. [Google Scholar]
- Mai-Duy, N.; Tran-Cong, T. Solving high order ordinary differential equations with radial basis function networks. Int. J. Numer. Methods Eng. 2005, 62, 824–852. [Google Scholar] [CrossRef]
- Mai-Duy, N.; Tran-Cong, T. Solving high order partial differential equations with indirect radial basis function networks. Int. J. Numer. Methods Eng. 2006, 63, 1636–1654. [Google Scholar] [CrossRef]
- Kansa, E.; Power, H.; Fasshauer, G.; Ling, L. A volumetric integral radial basis function method for time-dependent partial differential equation: I. formulation. Eng. Anal. Bound. Elem. 2004, 28, 1191–1206. [Google Scholar] [CrossRef]
- Mai-Duy, N.; Tran-Cong, T. An integrated-RBF technique based on Garlerkin formulation for elliptic differential equations. Eng. Anal. Bound. Elem. 2009, 33, 191–199. [Google Scholar]
- Thai-Quang, N.; Le-Cao, K.; Mai-Duy, N.; Tran, C.; Tran-Cong, T. A numerical scheme based on compact integrated RBFs and Adams- Bashforth/Crank–Nicolson algorithms for diffusion and unsteady fluid flow problems. Eng. Anal. Bound. Elem. 2013, 37, 1653–1667. [Google Scholar] [CrossRef]
- Reutskiy, S. A meshless radial basis function method for 2D steady-state heat conduction problems in anisotropic and inhomogeneous media. Eng. Anal. Bound. Elem. 2016, 66, 1–11. [Google Scholar] [CrossRef]












Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zaheer-ud-Din; Ahsan, M.; Ahmad, M.; Khan, W.; Mahmoud, E.E.; Abdel-Aty, A.-H. Meshless Analysis of Nonlocal Boundary Value Problems in Anisotropic and Inhomogeneous Media. Mathematics 2020, 8, 2045. https://doi.org/10.3390/math8112045
Zaheer-ud-Din, Ahsan M, Ahmad M, Khan W, Mahmoud EE, Abdel-Aty A-H. Meshless Analysis of Nonlocal Boundary Value Problems in Anisotropic and Inhomogeneous Media. Mathematics. 2020; 8(11):2045. https://doi.org/10.3390/math8112045
Chicago/Turabian StyleZaheer-ud-Din, Muhammad Ahsan, Masood Ahmad, Wajid Khan, Emad E. Mahmoud, and Abdel-Haleem Abdel-Aty. 2020. "Meshless Analysis of Nonlocal Boundary Value Problems in Anisotropic and Inhomogeneous Media" Mathematics 8, no. 11: 2045. https://doi.org/10.3390/math8112045
APA StyleZaheer-ud-Din, Ahsan, M., Ahmad, M., Khan, W., Mahmoud, E. E., & Abdel-Aty, A.-H. (2020). Meshless Analysis of Nonlocal Boundary Value Problems in Anisotropic and Inhomogeneous Media. Mathematics, 8(11), 2045. https://doi.org/10.3390/math8112045