Implicit Three-Point Block Numerical Algorithm for Solving Third Order Initial Value Problem Directly with Applications


Abstract
1. Introduction
2. Methodology
3. Analysis of the Method
3.1. Order and Error Constant
3.2. Zero Stability
4. Implementation
| Algorithm 1 The procedure to solve the third-order ODEs by using the new method. |
|
5. Results and Discussion
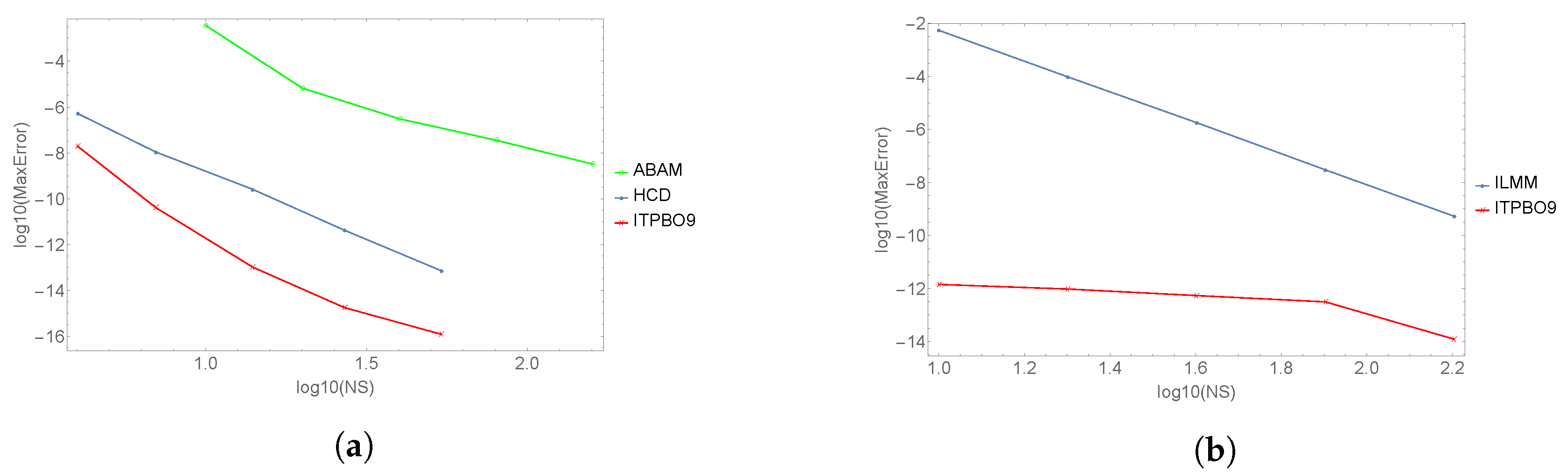
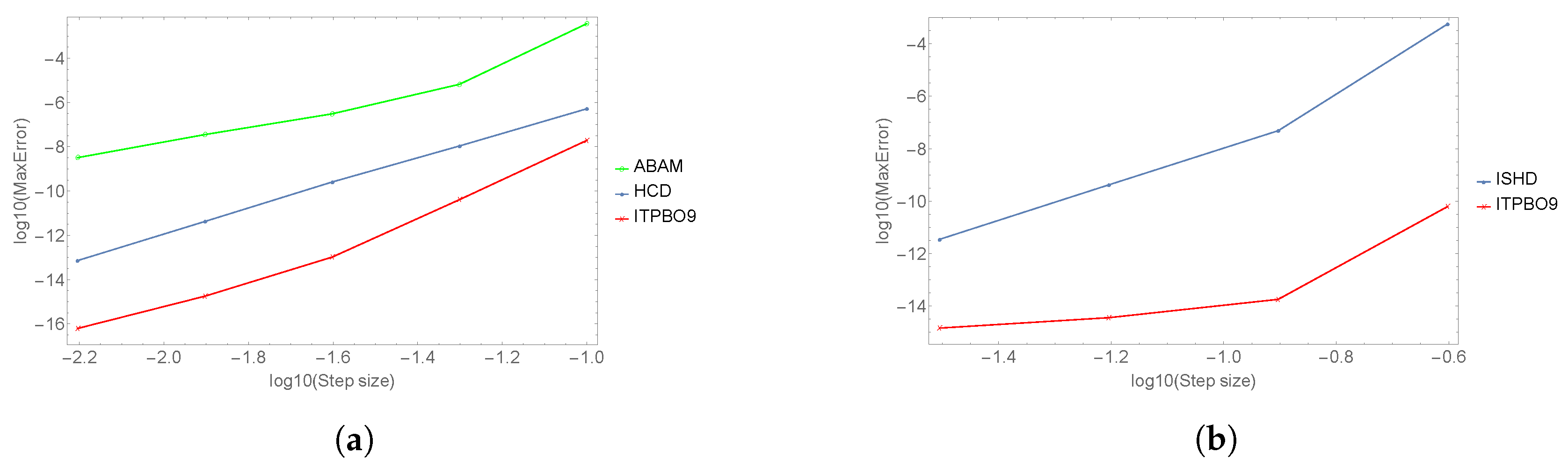
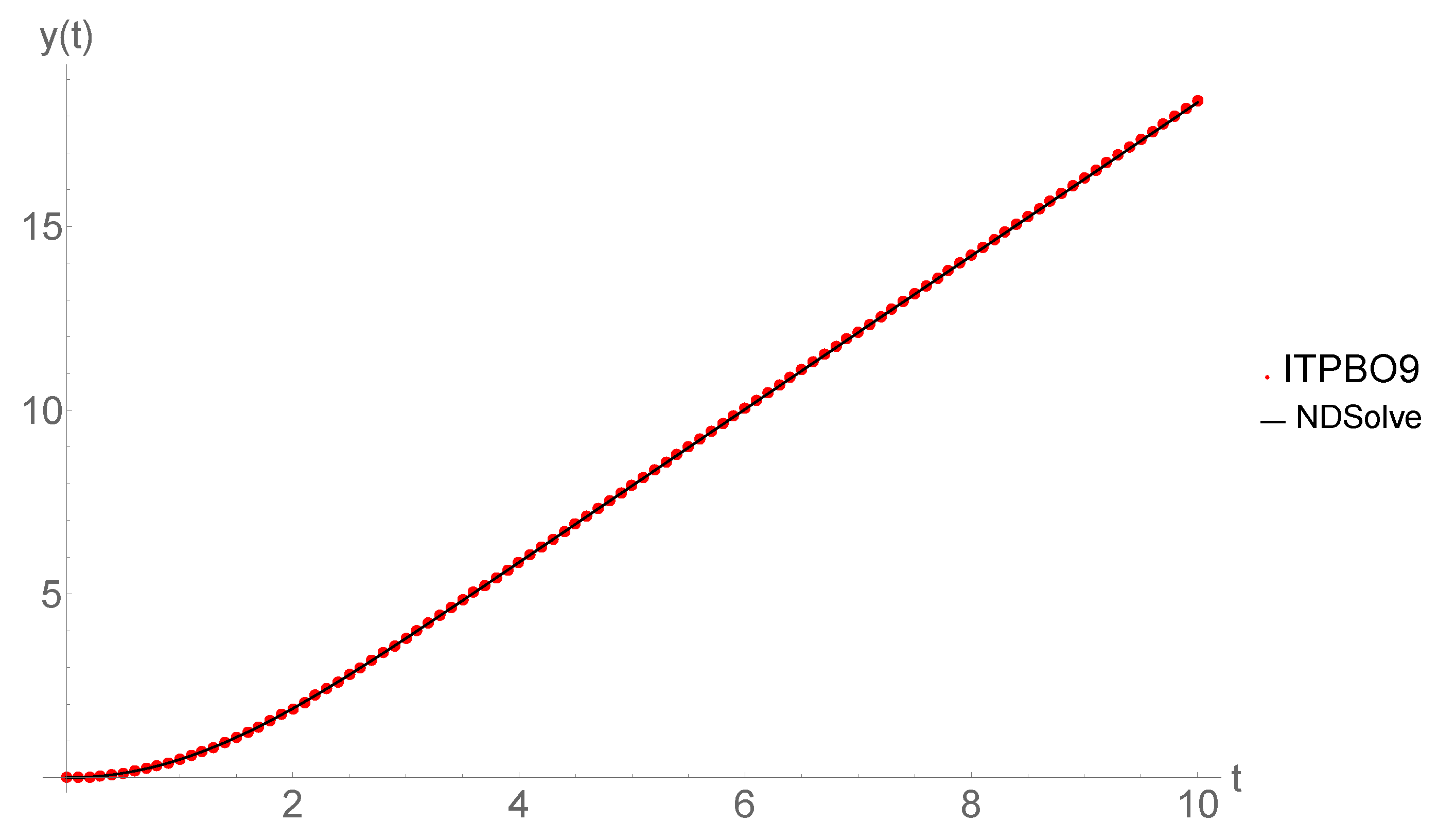
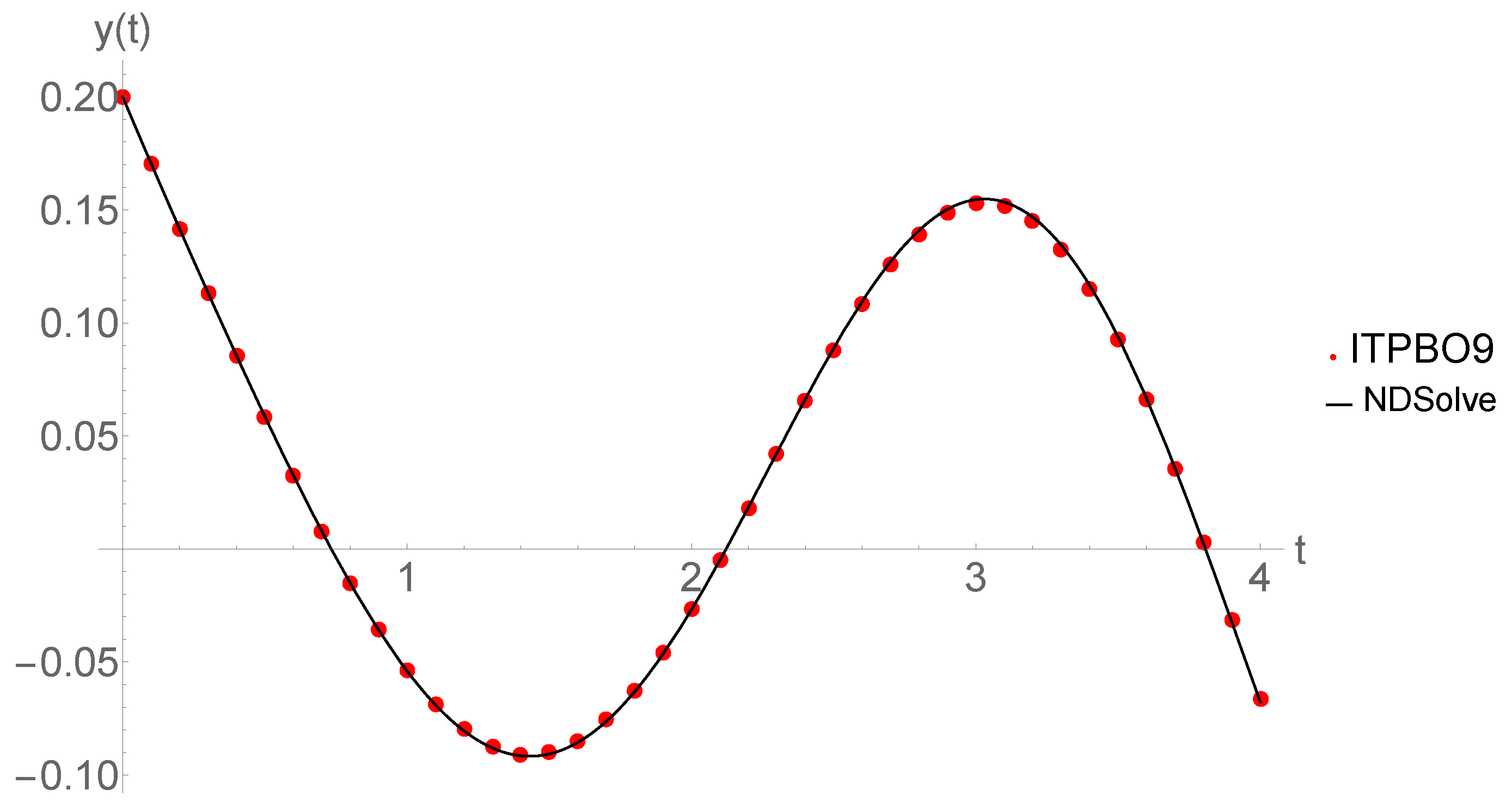
| ITPBO9: | Implicit three-point block direct method introduced in this paper of order nine. |
| HCD: | Block hybrid collocation direct method of order six [28]. |
| ABAM: | Adams Bashforth-Adams Moulton method of order four. |
| FSM: | Five-step direct method of order nine [18]. |
| ILMM: | Implicit linear multistep direct method of order six [6]. |
| ISHD: | Three-step hybrid direct method of order nine [5]. |
| h: | Step size. |
| NS: | Number of steps. |
| AE: | Absolute error at the point considered. |
| MAXE: | Maximum absolute error on the grid points at the interval. |
5.1. Tested Problems
5.2. Application to Thin Film Flow Problem
5.3. Application to Boundary Layer Equation
5.4. Application to Nonlinear Genesio Equation
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Boatto, S.; Kadanoff, L.P.; Olla, P. Traveling-wave solutions to thin-film equations. Phys. Rev. E 1993, 48, 4423. [Google Scholar] [CrossRef] [PubMed]
- Myers, T.G. Thin films with high surface tension. SIAM Rev. 1998, 40, 441–462. [Google Scholar] [CrossRef]
- Troy, W.C. Solutions of third-order differential equations relevant to draining and coating flows. SIAM J. Math. Anal. 1993, 24, 155–171. [Google Scholar] [CrossRef]
- Varlamov, V.V. The Third-Order Nonlinear Evolution Equation Governing Wave Propagation in Relaxing Media. Stud. Appl. Math. 1997, 99, 25–48. [Google Scholar] [CrossRef]
- Jikantoro, Y.; Ismail, F.; Senu, N.; Ibrahim, Z. A New Integrator for Special Third Order Differential Equations With Application to Thin Film Flow Problem. Indian J. Pure Appl. Math. 2018, 49, 151–167. [Google Scholar] [CrossRef]
- Jator, S.; Okunlola, T.; Biala, T.; Adeniyi, R. Direct Integrators for the General Third-Order Ordinary Differential Equations with an Application to the Korteweg–de Vries Equation. Int. J. Appl. Comput. Math. 2018, 4, 110. [Google Scholar] [CrossRef]
- Alkasassbeh, M.; Omar, Z. Hybrid one-step block fourth derivative method for the direct solution of third order initial value problems of ordinary differential equations. Int. J. Pure Appl. Math. 2018, 119, 207–224. [Google Scholar]
- Adeyeye, O.; Omar, Z. Direct solution of initial and boundary value problems of third order ODEs using maximal-order fourth-derivative block method. In AIP Conference Proceedings; AIP Publishing LLC: Melville, NY, USA, 2019; Volume 2138. [Google Scholar]
- Jeltsch, R.; Kratz, L. On the stability properties of Brown’s multistep multiderivative methods. Numer. Math. 1978, 30, 25–38. [Google Scholar] [CrossRef]
- Brugnano, L.; Trigiante, D. High-order multistep methods for boundary value problems. Appl. Numer. Math. 1995, 18, 79–94. [Google Scholar] [CrossRef]
- Awoyemi, D. A P-stable linear multistep method for solving general third order ordinary differential equations. Int. J. Comput. Math. 2003, 80, 985–991. [Google Scholar] [CrossRef]
- Majid, Z.A.; Suleiman, M.; Azmi, N.A. Variable step size block method for solving directly third order ordinary differential equations. Far East J. Math. Sci. 2010, 41, 63–73. [Google Scholar]
- Mechee, M.; Ismail, F.; Hussain, Z.M.; Siri, Z. Direct numerical methods for solving a class of third-order partial differential equations. Appl. Math. Comput. 2014, 247, 663–674. [Google Scholar] [CrossRef]
- Ramos, H.; Singh, G.; Kanwar, V.; Bhatia, S. An efficient variable step-size rational Falkner-type method for solving the special second-order IVP. Appl. Math. Comput. 2016, 291, 39–51. [Google Scholar] [CrossRef]
- Ramos, H.; Mehta, S.; Vigo-Aguiar, J. A unified approach for the development of k-step block Falkner-type methods for solving general second-order initial-value problems in ODEs. J. Comput. Appl. Math. 2017, 318, 550–564. [Google Scholar] [CrossRef]
- Jikantoro, Y.; Ismail, F.; Senu, N.; Ibrahim, Z.B. Hybrid methods for direct integration of special third order ordinary differential equations. Appl. Math. Comput. 2018, 320, 452–463. [Google Scholar] [CrossRef]
- Kuboye, J.; Omar, Z. Numerical solution of third order ordinary differential equations using a seven-step block method. Int. J. Math. Anal. 2014, 9, 743–754. [Google Scholar] [CrossRef]
- Awoyemi, D.; Kayode, S.; Adoghe, L. A five-step P-stable method for the numerical integration of third order ordinary differential equations. Am. J. Comput. Math. 2014, 4, 119–126. [Google Scholar] [CrossRef][Green Version]
- Ramos, H.; Rufai, M.A. Third derivative modification of k-step block Falkner methods for the numerical solution of second order initial-value problems. Appl. Math. Comput. 2018, 333, 231–245. [Google Scholar] [CrossRef]
- Ramos, H.; Rufai, M.A. A third-derivative two-step block Falkner-type method for solving general second-order boundary-value systems. Math. Comput. Simul. 2019, 165, 139–155. [Google Scholar] [CrossRef]
- Allogmany, R.; Ismail, F.; Ibrahim, Z.B. Implicit Two-point Block Method with Third and Fourth Derivatives for Solving General Second Order ODEs. Math. Stat. 2019, 7, 123. [Google Scholar] [CrossRef]
- Wend, D.V. Existence and uniqueness of solutions of ordinary differential equations. Proc. Am. Math. Soc. 1969, 23, 27–33. [Google Scholar] [CrossRef]
- Wend, D. Uniqueness of solutions of ordinary differential equations. Am. Math. Mon. 1967, 74, 948–950. [Google Scholar] [CrossRef]
- Stoer, J.; Bulirsch, R. Introduction to Numerical Analysis; Springer: New York, NY, USA, 2002. [Google Scholar]
- Lambert, J.D. Numerical Methods for Ordinary Differential Systems: The Initial Value Problem; John Wiley & Sons, Inc.: New York, NY, USA, 1991. [Google Scholar]
- Fatunla, S.O. Numerical Methods for Initial Value Problems in Ordinary Differential Equations; Academic Press Inc.: New York, NY, USA, 1988. [Google Scholar]
- Ackleh, A.S.; Allen, E.J.; Kearfott, R.B.; Seshaiyer, P. Classical and Modern Numerical Analysis: Theory, Methods And Practice; Chapman and Hall/CRC: Boca Raton, FL, USA, 2009. [Google Scholar]
- Yap, L.K.; Ismail, F.; Senu, N. An accurate block hybrid collocation method for third order ordinary differential equations. J. Appl. Math. 2014, 2014. [Google Scholar] [CrossRef]
- Tuck, E.; Schwartz, L. A numerical and asymptotic study of some third-order ordinary differential equations relevant to draining and coating flows. SIAM Rev. 1990, 32, 453–469. [Google Scholar] [CrossRef]
- Duffy, B.; Wilson, S. A third-order differential equation arising in thin-film flows and relevant to Tanner’s law. Appl. Math. Lett. 1997, 10, 63–68. [Google Scholar] [CrossRef]
- Mechee, M.; Senu, N.; Ismail, F.; Nikouravan, B.; Siri, Z. A three-stage fifth-order Runge-Kutta method for directly solving special third-order differential equation with application to thin film flow problem. Math. Probl. Eng. 2013, 2013, 795397. [Google Scholar] [CrossRef]
- Schlichting, H.; Gersten, K.; Krause, E.; Oertel, H.; Mayes, K. Boundary-Layer Theory; McGraw-Hill: New York, NY, USA, 1955. [Google Scholar]
- Lien-Tsai, Y.; Cha’o-Kuang, C. The solution of the Blasius equation by the differential transformation method. Math. Comput. Modell. 1998, 28, 101–111. [Google Scholar] [CrossRef]
- Genesio, R.; Tesi, A. Harmonic balance methods for the analysis of chaotic dynamics in nonlinear systems. Autom. J. IFAC 1992, 28, 531–548. [Google Scholar] [CrossRef]
- Bataineh, A.S.; Noorani, M.; Hashim, I. Direct Solution of n th-Order IVPs by Homotopy Analysis Method. Available online: https://projecteuclid.org/download/pdf_1/euclid.ijde/1485399721 (accessed on 5 March 2020).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| t | FSM | ITPBO9 |
|---|---|---|
| 0.1 | 6.6218 (−13) | 2.593481 (−13) |
| 6.2238 (−11) | 4.361134 (−11) | |
| 3.5134 (−09) | 2.967204 (−11) | |
| 6.1100 (−07) | 9.981296 (−11) | |
| 6.4183 (−07) | 2.342377 (−10) | |
| 1.8082 (−06) | 4.550881 (−10) | |
| 1.3511 (−06) | 7.912180 (−10) | |
| 1.3367 (−06) | 1.275017 (−09) | |
| 7.9041 (−06) | 1.945292 (−09) | |
| 3.7360 (−05) | 2.849440 (−08) |
| h | Method | NS | MAXE |
|---|---|---|---|
| 0.1 | ABAM | 10 | 1.69 (−04) |
| HCD | 4 | 5.21 (−07) | |
| ITPBO9 | 4 | 1.94 (−08) | |
| 0.05 | ABAM | 20 | 6.65 (−06) |
| HCD | 7 | 1.09 (−08) | |
| ITPBO9 | 7 | 4.09 (−11) | |
| 0.025 | ABAM | 40 | 3.08 (−07) |
| HCD | 14 | 2.57 (−10) | |
| ITPBO9 | 14 | 1.04 (−13) | |
| 0.0125 | ABAM | 80 | 3.56 (−08) |
| HCD | 27 | 2.23 (−12) | |
| ITPBO9 | 27 | 1.78 (−15) | |
| 0.00625 | ABAM | 160 | 3.23 (−09) |
| HCD | 54 | 7.24 (−14) | |
| ITPBO9 | 54 | 6.22 (−16) |
| h | ISHD | ITPBO9 |
|---|---|---|
| 5.7164094 (−04) | 6.169287 (−11) | |
| 4.8477800 (−08) | 1.776357 (−14) | |
| 4.1669318 (−10) | 3.552714 (−15) | |
| 3.4571600 (−12) | 1.421085 (−15) |
| NS | ILMM | ITPBO9 |
|---|---|---|
| 10 | 5.446 (−03) | 1.421085 (−12) |
| 20 | 9.590 (−05) | 9.521273 (−13) |
| 40 | 1.804 (−06) | 5.400125 (−13) |
| 80 | 2.981 (−08) | 3.126388 (−13) |
| 160 | 5.291 (−10) | 1.222134 (−14) |
| t | Exact Solution | Computed Solution | AE (ITPBO9) |
|---|---|---|---|
| 0.1 | 0.100167421161559790 | 0.100167421161559790 | 0.000000+00 |
| 0.201357920790330820 | 0.201357920790330770 | 5.551115 (−17) | |
| 0.304692654015397630 | 0.304692654015397520 | 1.110223 (−16) | |
| 0.411516846067488230 | 0.411516846067487900 | 3.330669 (−16) | |
| 0.523598775598299150 | 0.523598775598298700 | 4.440892 (−16) | |
| 0.643501108793284820 | 0.643501108793284370 | 4.440892 (−16) | |
| 0.775397496610753630 | 0.775397496610753080 | 5.551115 (−16) | |
| 0.927295218001613080 | 0.927295218001612190 | 8.881784 (−16) |
| t | Exact Solution of | Computed Solution of | AE (ITPBO9) in |
|---|---|---|---|
| 0.904837418035959740 | 0.904837418035959630 | 0.000000+000 | |
| 0.740818220681717880 | 0.740818220681717770 | 5.551115 (−17) | |
| 0.606530659712633310 | 0.606530659712633310 | 1.942890 (−16) | |
| 0.496585303791409300 | 0.496585303791409300 | 2.498002 (−16) | |
| 0.406569659740598940 | 0.406569659740598890 | 2.914335 (−16) |
| t | Exact Solution of | Computed Solution of | AE (ITPBO9) in |
|---|---|---|---|
| 0.818730753077981710 | 0.818730753077981820 | 0.000000+000 | |
| 0.548811636094026610 | 0.548811636094026280 | 5.551115 (−17) | |
| 0.367879441171442500 | 0.367879441171442170 | 1.942890 (−16) | |
| 0.246596963941606550 | 0.246596963941606270 | 2.498002 (−16) | |
| 0.165298888221586560 | 0.165298888221586340 | 2.914335 (−16) |
| t | Exact Solution of | Computed Solution of | AE (ITPBO9) in |
|---|---|---|---|
| 0.740818220681717880 | 0.740818220681717880 | 0.000000+000 | |
| 0.406569659740598890 | 0.406569659740598940 | 5.551115 (−17) | |
| 0.223130160148429480 | 0.223130160148429680 | 1.942890 (−16) | |
| 0.122456428252981490 | 0.122456428252981740 | 2.498002 (−16) | |
| 0.067205512739749340 | 0.067205512739749632 | 2.914335 (−16) |
| t | Exact Solution Ref. [30] | ISHD | ITPBO9 | AE (ISHD) | AE (ITPBO9) |
|---|---|---|---|---|---|
| 0.1 | 1.000000000 | 1.0000000000 | 1.0000000000 | 0.0000 + 000 | 0.0000 + 000 |
| 0.2 | 1.221211030 | 1.2212100137 | 1.2212100045 | 1.0163 (−06) | 1.0255 (−06) |
| 0.4 | 1.488834893 | 1.4888348170 | 1.4888347799 | 7.6000 (−08) | 1.1310 (−07) |
| 0.6 | 1.807361404 | 1.8073614815 | 1.8073613977 | 7.7500 (−08) | 6.3000 (−09) |
| 0.8 | 2.179819234 | 2.1797930619 | 2.1798192339 | 2.6172 (−05) | 8.0000 (−11) |
| 1.0 | 2.608275822 | 2.6082751000 | 2.6082748676 | 7.2200 (−07) | 9.5440 (−07) |
| b | h | Method | Step | Computed Solution |
|---|---|---|---|---|
| 0.1 | ITPBO9 | 4 | −0.0540040835391235 | |
| HCD | 4 | −0.0540040832456468 | ||
| NDSolve | 10 | −0.0540040799051468 | ||
| 0.01 | ITPBO9 | 34 | −0.0540040835547517 | |
| HCD | 34 | −0.0540040835547393 | ||
| NDSolve | 100 | −0.0540040799051468 | ||
| 0.1 | ITPBO9 | 13 | −0.0676306051287455 | |
| HCD | 13 | −0.0676305906240893 | ||
| NDSolve | 40 | −0.0676380593281975 | ||
| 0.01 | ITPBO9 | 133 | −0.0676306051591404 | |
| HCD | 133 | −0.0676306051590027 | ||
| NDSolve | 400 | −0.0676305976247482 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Allogmany, R.; Ismail, F. Implicit Three-Point Block Numerical Algorithm for Solving Third Order Initial Value Problem Directly with Applications. Mathematics 2020, 8, 1771. https://doi.org/10.3390/math8101771
Allogmany R, Ismail F. Implicit Three-Point Block Numerical Algorithm for Solving Third Order Initial Value Problem Directly with Applications. Mathematics. 2020; 8(10):1771. https://doi.org/10.3390/math8101771
Chicago/Turabian StyleAllogmany, Reem, and Fudziah Ismail. 2020. "Implicit Three-Point Block Numerical Algorithm for Solving Third Order Initial Value Problem Directly with Applications" Mathematics 8, no. 10: 1771. https://doi.org/10.3390/math8101771
APA StyleAllogmany, R., & Ismail, F. (2020). Implicit Three-Point Block Numerical Algorithm for Solving Third Order Initial Value Problem Directly with Applications. Mathematics, 8(10), 1771. https://doi.org/10.3390/math8101771