1. Introduction
B-splines were constructed by Lobachevsky as convolutions of certain probability distributions in the early 19th century. Spline functions are used in various numerical analysis areas like interpolation, approximation, computer aided geometric design, numerical solutions of differential equations, etc. The modern theory of spline approximation was started by Schoenberg in 1946, when he used B-splines for statistical data smoothing, see [
1]. De Boor gave the recurrence relation for B-splines in [
2]. Gordon and Reisenfield formally introduced B-splines into computer aided design in [
3].
Mangasarian and Schumaker introduced discrete splines,
h-splines, to solve discrete analogoues of minimization problems in a Banach space (see [
4]). These discrete splines of degree
n are defined on a subset of real line of the form
,
, whose knot sequence is in
and their polynomial pieces agree at the knots up to the order
of forward differences with step size
h instead of derivatives. In [
5],
q-splines which allow us to model tolerances, jumps and quantum leaps in the derivatives at the joins, were defined recursively based on a
q-analogue of the de Boor algorithm. After giving certain properties, they defined blossoms for
q-B-splines. In [
6], fundamental formulas of classical B-splines were extended to
q-B-splines. The
q-splines are piecewise polynomials whose
q-derivatives up to some order agree at the joins. A recent study relates
q-B-splines with the
q-Peano kernels of divided differences and solves a best approximation problem in the space of quantum integrable functions, see [
7].
Let be the knots, and let n be a nonnegative integer and be a fixed real. A q-spline function of degree n having knots is a function S such that
- (i)
S is a polynomial of degree up to n on each interval , .
- (ii)
S is quantum continuous of order at the knots.
Then, S is a continuous piecewise polynomial of degree at most n and quantum continuous of order at the knots. Here, “quantum continuous of order at the knots” means the quantum derivatives , of adjacent polynomial segments agree at the knots.
The rest of this paper is organized as follows. In
Section 2, we begin with definitions and theorems in
q-calculus concerning this work. In
Section 3, we give some properties of
q-B-splines and give proofs which are not stated explicitly in [
5]. In
Section 4, we find a new basis for the
q-spline spaces with a given knot sequence and degree. We define
q-B-splines in a different manner from [
5,
6] but similar to that of Curry and Schoenberg [
8] in which the truncated power function played a significant role. Our approach is based on a certain
q-truncated power function rather than the recursive definition of
q-B-splines. We show how we can obtain quantum derivatives and quantum integrals of a given
q-spline function. Furthermore, we find the polynomial pieces of a
q-spline by using quantum derivatives.
3. Properties of -B-Splines
The
q-B-splines are introduced first by Simeonov and Goldman in [
5]. We give from [
5,
6] the important properties of
q-B-splines that will be used in this work. Throughout the paper
refers to
q-B-spline basis functions.
Property1. (Recurrence Relation) Let be an integer and be a set of distinct real numbers. Then, q-B-splines satisfies the recurrence relationwith Property 3. The interval of support of the q-B-spline: .
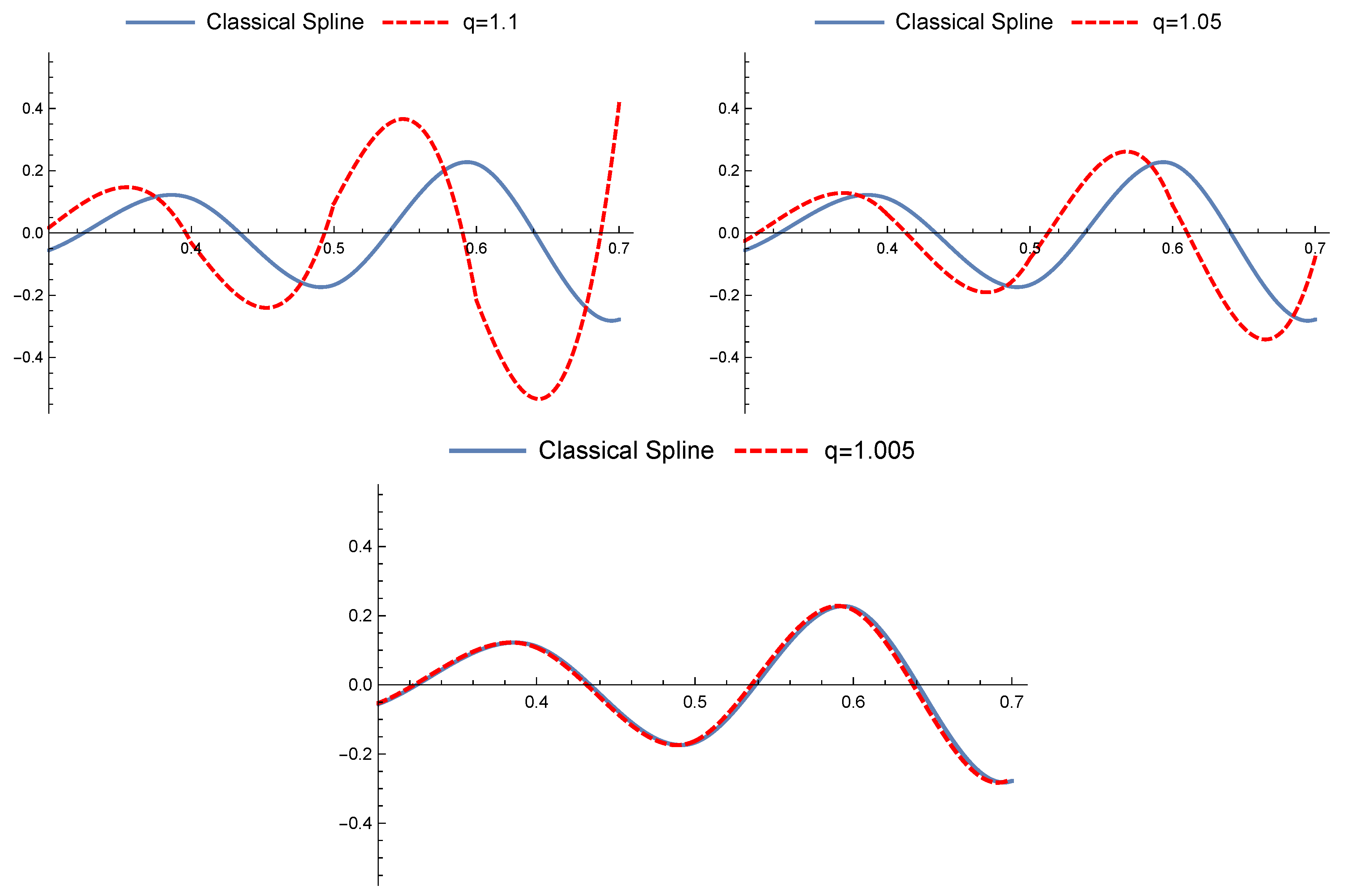
Property 4. For any integer , we have Remark 1. The classical B-spline is nonnegative for each k, n and all . However, Figure 1 shows that q-B-splines may be nonnegative depending on the value of parameter q. Remark 2. If , it is obvious that q-B-splines become classical B-splines and they mimic the classical counterpart when q is near 1.
Figure 2 compares
q-B-spline curves with various values of
q and for a fixed knot sequence and fixed control points.
The following Lemmas 1, 2, and Proposition 1 are noted in [
5]. Here, we prove them by using induction. We use the notation
in the place of
to emphasize its dependence on the initial parameter value
q.
Lemma 1. For , the q-B-splines belong to continuity class that is quantum derivatives of agree up to the order at the joins.
Proof. Since is continuous, we can say that Suppose that . By Property 4, it follows that . Thus, . □
The following result shows that the sequence of q-B-splines of the same degree is linearly independent in a single interval of its support.
Lemma 2. The set of q-B-splines is linearly independent on
Proof. When
, it is obvious that the set is linearly independent. Let
and assume that the Lemma 2 holds for
. Let
and suppose that the
q-spline
S restricted to the interval
,
. By Equation (
3), we have
Since
and
on
, by induction hypothesis
is linearly independent on the interval
. Therefore, we must have that all the coefficients in Equation (
4) are zero, that is,
, say all of them equal to the value
c. Thus, by the partition unity property of
q-B-splines, we have
on
. Hence, by the assumption
, we have
which shows that the set of
q-B-splines
is linearly independent on an interval
□
Proposition 1. The set of q-B-splines is linearly independent on
Proof. Let
and suppose
. For
, on the interval
, only
are non-zero and we have
From the previous lemma, the set
is linearly independent on
. Hence, the coefficients
for
in Equation (
5). If all the
’s are zero, then there is nothing to prove. Suppose, on the contrary, that not all the
’s are zero. Let
j be the index such that
. Assume
and
. For any
, we obtain
which contradicts
. Therefore, all the
’s are zero and this implies that the set
is linearly independent on
. □
4. The Quantum Spline Space
Let denote the space of the q-spline functions which are quantum continuous up to the order , and n denotes the degree of polynomial pieces, is the number of knots in the knot sequence, and q is a nonzero initial parameter.
The next theorem shows that q-B-splines form a basis for the quantum spline space of degree n with the knot sequence .
We note that, although the work [
5] investigates broadly
q-B-splines via blossoming, the following theorem and its proof were not mentioned.
Theorem 2. A basis for the space iswhere Consequently, the dimension of is and q-B-splines with form a basis for the q-spline space .
Proof. It is obvious that each
for
is in the space
. Thus, it is enough to show that the dimension of the space
is
. Firstly, we show that each element
in
can be written in the form
Since in the interval
all the truncated powers vanish,
is a polynomial of degree
n, say
. Thus, we have
which determines all the coefficients
. In the interval
,
is another polynomial, say
. According to the quantum continuity at the knots, we have at
,
Since
is a polynomial of degree at most
n, we have
for some
. Hence, we can write
When we repeat the same argument at the other internal knots
, we obtain the
q-spline in Equation (
6). Thus, any spline of degree
n on the interval
with intermediate knots
may be written as a sum of multiples of
functions
Since these functions are linearly independent, they form a basis for the this spline space and hence the dimension of the space is . Furthermore, it follows from Proposition 1 that q-B-splines with form a basis for the space . □
In [
5],
q-B-splines are constructed by using the de Boor algorithm. In the following theorem, we construct
q-B-splines using properties of truncated power functions depending on
q. Namely, we give explicit expression of
q-B-spline basis functions in terms of linear combinations of
q-truncated power functions.
Theorem 3. with respect to the normalization . Proof. Let
be a basis in the expression
such that each function
is identically zero over a large part of the range
. Consider an element of the space
that is zero on the intervals
and
, but that is nonzero on
, where
. If
is such a function, it can be expressed in the form
where the parameters
have to satisfy the condition
since
for
and
.
By rearranging the terms and using the properties of Lagrange polynomial interpolation, we have
If
, then equations in (
7) have a nonzero solution. If
, then the coefficients are
where
c is a nonzero constant. Thus, we can conclude that
By applying the normalization constraint
, we obtain the
q-B-splines
□
A consequence of the last expression is the following:
Proof. This follows from the following property of divided differences
by replacing
f by the truncated power function. □
Remark 3. One can easily show that q-B-spline basis functions defined in Equation (
2)
(Theorem 6 in [6]) are right continuous and that the q-B-spline basis functions defined in Equation (
9)
are left continuous. We have shown that
q-B-splines form a basis for
q-splines. Now, let us investigate how we can find the quantum derivatives
of the
q-spline functions. The following algorithms allow us to store, evaluate, and manipulate
q-splines on a computer easily, see [
10]. In addition, we show that
-derivatives of
q-splines are again
q-spline functions.
Theorem 4. Let S be a given q-spline function such that . Then, for all and all where Proof. This shows that Equation (
11) is true for
. Repeating the same argument shows that the formula (
11) is true for each
□
Now, we derive a formula for computing the -integral of a given q-spline function.
Theorem 5. Let S be a given q-spline function such that . Then, for all , Proof. This is a quantum spline of degree
and so
can be written as
Using (
10) and (
11) for all
gives
where
It follows by comparing the appropriate coefficients of the basis that
and
Therefore,
and this completes the proof. □
In the next proposition, we demonstrate a way to find the polynomials on each interval of a q-spline function. In certain circumstances, we may have to evaluate the q-spline function S at a large number of points, then it is advantageous to determine the polynomial pieces at each interval for each j.
Proposition 2. Let be a q-spline function such thatand be the polynomial restricted to for Then, Proof. Since
is a polynomial of degree
n on the interval
for each
, we can write
where
for
and
are the unknowns and
Then, it is easily seen that, by taking
-derivative of
r times, substituting
in Equation (
10) gives


{kind=link}
{kind=link}

