Abstract
The aim of this work is to study a class of nabla fractional difference equations with anti-periodic conditions. First, we construct the related Green’s function. After deducing some of its useful properties, we obtain an upper bound for its sum. Then, using this bound, we are able to obtain three existence results based on the Banach contraction principle, Brouwer’s fixed point theorem, and Leray–Schauder’s nonlinear alternative, respectively. Then, we show some non-existence results for the studied problem, and existence results are also provided for a system of two equations of the considered type. Finally, we outline some particular examples in order to demonstrate the theoretical findings.
Keywords:
nabla fractional difference equations; fixed-point theorems; uniqueness results; existence result MSC:
26A33; 34A08; 39A27
1. Introduction
Since the models described with fractional orders proved out to be much more accurate in comparison to those with integer orders, this concept has become fundamental in many areas of mathematics in the recent few decades. Consequently, the interest in discrete fractional problems has recently surged. They are applicable in numerous branches of engineering and science, including signal processing, control theory, and mathematical modeling of phenomena in economics, biology, and physics, where discrete events or data points are predominant. We refer to the reader [1,2,3,4] and the references therein for an introduction to the fundamentals of this subject.
Usually, nabla fractional models better describe some long-term memory effects [5,6,7], which make them highly suitable for modeling non-local processes in time or space. As a result, a lot of recent papers focused on nabla problems with different boundary conditions, like Dirichlet [8,9,10,11,12], periodic [13], mixed [14,15,16], summation [17] and separated boundary conditions [18,19] or systems [10,20,21,22].
For example, in [18], the authors studied the following nabla fractional problem with separated boundary conditions:
where , , , , and denotes the -th-order Riemann–Liouville nabla difference operator, with and . The associated Green’s function is constructed as a series of functions with the help of spectral theory, and some of its properties are obtained. Under suitable conditions on the nonlinear part of the problem, the authors managed to deduce two existence results by means of fixed-point theory.
Later, in [17], the authors studied the nabla fractional problem coupled with summation conditions:
where , , , , is continuous with respect to the second argument; and denotes the -order Riemann–Liouville nabla fractional difference. Under some sufficient conditions, the authors ensured existence and uniqueness results. Moreover, the obtained solution is generalized Ulam–Hyers–Rassias-stable.
Recently, in [16] the authors studied the nabla fractional problem
where and are continuous functions, while , and are th- and th-order nabla difference operators of the Riemann–Liouville type, respectively. Depending on the values of the orders of the operators, the authors split their research into two main cases, and for each one of them, they managed to prove that the considered problem possesses a positive solution.
In [10], the author obtained the unique existing solution of the systems
where , and are continuous, and deemed that it is Ulam–Hyers-stable.
Inspired by the aforementioned works, this study considered the nabla fractional problem with a Riemann–Liouville operator and anti-periodic conditions:
where , with , denotes the -order Riemann–Liouville nabla fractional difference of u in and is continuous.
We point out that these conditions have a clear physical representation, as they imply that total “displacement” across the domain is balanced, with the gradient (velocity, flux, and related physical quantities) entering at the point and exiting at the point n also being balanced. Such conditions arise in real-life problems, where discrete fractional oscillators or some models in biology with memory effects are studied. Moreover, discrete fractional boundary value problems involve finding solutions to fractional difference equations that satisfy prescribed conditions at more than one point, typically at the endpoints of a discrete interval. Among the various types of boundary conditions, antiperiodic boundary conditions are of particular interest because of their broad applicability. Antiperiodic boundary value problems model phenomena in which the system returns to a state, i.e., the negative of its initial condition after a fixed period are useful in describing alternating current systems and certain waveforms. Establishing existence and uniqueness results for such boundary value problems is not only of theoretical interest but is also crucial for practical implementation. These results provide the foundational assurance that the mathematical models used to represent real-world phenomena are both well-posed and solvable. They also pave the way for the development of efficient numerical methods and simulations. In this context, the present study contributes to the theoretical framework of discrete fractional calculus and improves its applicability in modeling complex discrete dynamic systems.
We also refer to the reader to [23,24], where some singular stochastic problems are considered, along with some numerical methods for heat model arising in viscoelasticity.
Also note that the arguments in our manuscript are different from those given in [10]. Although the boundary conditions considered in both problems are the same, there is a clear distinction between the fractional difference equations considered in both works since both operators do not coincide. That is,
These operators coincide if . In such a case, both boundary value problems are ill-posed. Moreover, in this manuscript, we study an anti-periodic problem with a different fractional difference equation in contrast to the fractional difference equations considered in [10]. So, we need to define a different operator and a cone, where our aim is to deduce the existence of a fixed point. Consequently, the results obtained in our manuscript are completely different from those obtained in [10]. Furthermore, since the boundary value problems considered in both works are completely different, this manuscript presents novel results.
We point out that the only limitation of this work is the fact that only a sign-changing solution could be obtained, based on the non-constant sign of Green’s function, which is typical for problems coupled with anti-periodic conditions, such as (2), and this limitation could not be resolved.
As novel contributions to the work, we can highlight the following:
- We provided some examples to illustrate the main results for this new problem for the literature.
This manuscript is structured as follows: Section 2 recalls the preliminaries required for the article. Section 3 deduces the exact expression of Green’s function that is associated with (1)–(2), and the upper bound of its sum is obtained. After that, in Section 4, under certain sufficient conditions, two existence results are established for problem (1)–(2) using the Banach contraction principle, Brouwer theorem and Leray–Schauder’s nonlinear alternative, respectively. In Section 5, non-existence results are demonstrated, and in Section 6, existence results are provided for a system of two equations. Finally, the theoretical results are illustrated in Section 7, as some examples are shown there to highlight their practical value. In the Conclusions Section, we finish with a brief summary of our obtained results and some possible future directions for extending this research.
2. Preliminaries
To the end of this work, we shall use the following fundamentals of discrete fractional calculus [4], which are represented as , . Here, , with .
Definition 1
([4]). For any α, , the generalized rising function is
provided the quotient is well-defined, with being the Euler gamma function for those complex numbers z for which the real part of z is positive.
Definition 2
([4]). Let . The -order nabla fractional Taylor monomial is
provided the right-hand side is well-defined.
Lemma 1
([4]). Take and .
- (i)
- for and for ;
- (ii)
- decreases with respect to s for any and . Moreover, it decreases with respect to ζ for any and .
Definition 3
([4]). Let . The , , fractional difference of w in the nabla sense is
We will mainly use the following well-known classical results in this work, the Banach contraction principle, Brouwer theorem, and Leray–Schauder’s nonlinear alternative, respectively, which can be found in [25].
Theorem 1.
A contraction mapping on a complete metric space has exactly one fixed point.
Theorem 2.
Let X be a nonempty, bounded, closed and convex set. Moreover, if is a continuous mapping, then F has a fixed point.
Theorem 3.
Let be a Banach space, C a closed, convex subset of , U an open subset of C, and . Suppose that is a completely continuous map. Then, either of the two is possible:
- 1.
- T has a fixed point in ;
- 2.
- There exist and such that .
3. Construction and Properties of Green’s Function
The following section presents the construction of Green’s function for the linear problem and deduces some of its useful properties, which we will need at the end of this work.
coupled with boundary conditions (2). Here, . For this purpose, we introduce the following notation:
Proof.
It is well-known [4] that the general solution of (3) can be expressed as
with and being arbitrary constants. By applying ∇ on the above equation, we obtain
Using , we get
Similarly, by , we obtain
Now, set
and
Lemma 2.
For given in (5), we have the upper bound
Proof.
Using
we have that
Note that since the left-hand side is positive and decreasing for . Thus,
Similarly, since ,
Finally, using , we deduce
which proves our claim. □
4. Existence Results
Let be the Banach space of all continuous functions with the standard maximum norm
For each , define the operator by
The first key results of our work are as follows:
Proof.
Let . Then, for each , one can deduce that
Theorem 6.
Proof.
Let and space . We only need to verify that . Indeed, for each ,
Now, define
Clearly, is a convex bounded closed nonempty subset of .
Theorem 7.
Assume that the following conditions hold:
- (C1)
- There exists a map from I into and a nondecreasing map from into such that
- (C2)
- There exists such thatwhere
Proof.
From (C1), for and ,
implying that
Thus, maps into a bounded set. From the fact that I is a discrete set, it is an immediate consequence that maps into an equicontinuous set. The Arzela–Ascoli theorem implies that is completely continuous. Let and assume that for some . In such a case,
implying that
Now, condition (C2) gives us that . Denote
Obviously, the map from into is completely continuous. The definition ensures that no with for some exist. Theorem 3 implies that has a fixed point in . □
Remark 1.
We point out that in all of the three theorems established above, one cannot ensure that the obtained solution is not trivial. Only the assumption on I can imply such a result.
5. Non-Existence Result
Now let us focus on the problem
coupled with (2), where and is continuous.
Lemma 3.
If a nontrivial solution of the discrete fractional problem (2)–(11) exists, then
Proof.
Clearly, u is a solution of (2)–(11) if and only if u solves the summation equation
Hence,
Using Theorem 2, we get
Thus, we deduce (12). □
Finally, our last result of this section is the following:
Theorem 8.
If
then problem (2)–(11) has no nontrivial solution.
Proof.
The proof is trivial, as it follows directly from the previous lemma, and we omit it. □
6. Existence Results for Systems
In this section, we will end our study by considering a system of two equations and giving some existence results for it.
Let and , be continuous functions. Obviously, the product space is also a Banach space with the norm
Set the operator as follows:
where
One can study the system
and obtain the following results:
Theorem 9.
For each , there exist non-negative numbers and such that
for each and all , , and
and then (14) has a unique solution in .
Proof.
Let , . Then, for each , where , one can deduce that
implying that
for . Thus, we have
Hence, , which gives us that S is a contraction; therefore, by Theorem 1, its unique fixed point is indeed the solution of (14). □
Theorem 10.
Proof.
Let and define . We only need to verify that . Indeed, for each , and ,
implying that
for . Thus, we have
Thus, ; therefore, by Theorem 2, S possesses a fixed point in Y, which is the solution of system (14). □
7. Examples
Here, we demonstrate the implication of Theorems 7 and 9.
Example 1.
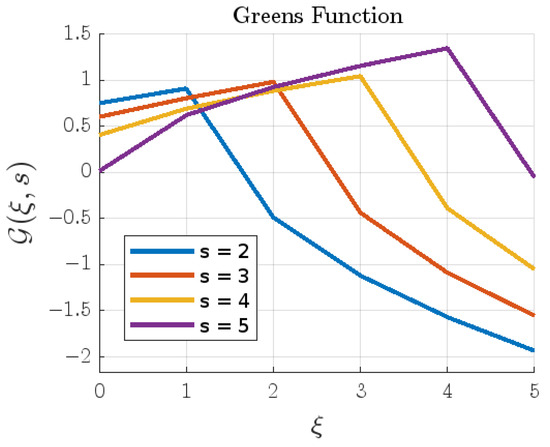
Let us consider
Here, , , and . In this case, the related Green’s function’s graph is plotted in Figure 1.
Figure 1.
Plot of Green’s function.
Clearly,
where
and
Also, and is a nondecreasing function. As a result, one can easily verify that (C1) of Theorem 7 holds true. Moreover,
Now, we calculate L. We have . Then,
and
There exists such that
verifying (C2) of Theorem 7. Hence, from Theorem 7, it follows that (15) possesses a solution on .
Example 2.
Let us consider
Here, , , and , and . Clearly,
for each and all , with , , , . We have . Then,
and
Since
by Theorem 9, problem (16) has a unique solution in .
8. Conclusions
In this manuscript, we were able to deduce the exact expression of Green’s function related to the new one for an anti-periodic problem within the literature (1)–(2). We obtained an upper bound for its sum, and under some suitable conditions, we were able to prove existence and non-existence results, based on different fixed-point theorems. Then, we studied a system of two equations of the type studied above, and, again, we were able to deduce existence results. In the end, we were able to show the applicability of these theoretical findings with some particular examples. To our knowledge, this is the first research study in which such results have been established for this problem.
According to us, the above-mentioned results can be extended in some future works, where the authors may study different kind of systems. Moreover, using different methods, they may obtain different existence results.
Author Contributions
Conceptualization, N.D.D. and J.M.J.; methodology, N.D.D. and J.M.J.; software, N.D.D. and J.M.J.; validation, N.D.D. and J.M.J.; formal analysis, N.D.D. and J.M.J.; investigation, N.D.D. and J.M.J.; resources, N.D.D. and J.M.J.; data curation, N.D.D. and J.M.J.; writing—original draft preparation, N.D.D. and J.M.J.; writing—review and editing, N.D.D. and J.M.J.; visualization, N.D.D. and J.M.J.; supervision, N.D.D. and J.M.J.; project administration, N.D.D. and J.M.J.; funding acquisition, N.D.D. All authors have read and agreed to the published version of the manuscript.
Funding
This work was financed by the European Union-NextGenerationEU through the National Recovery and Resilience Plan of the Republic of Bulgaria, project code BG-RRP-2.013-0001-C01.
Data Availability Statement
The original contributions presented in this study are included in the article. Further inquiries can be directed to the corresponding author.
Acknowledgments
The authors thank the anonymous referees for their useful comments, which have contributed to improving this paper.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Miller, K.S.; Ross, B. Fractional Difference Calculus. Univalent Functions, Fractional Calculus, and Their Applications; Ellis Horwood Series in Mathematics and Its Applications; Horwood: Chichester, UK, 1989. [Google Scholar]
- Bohner, M.; Peterson, A. Dynamic Equations on Time Scales: An Introduction with Applications; Springer: Boston, MA, USA, 2001. [Google Scholar]
- Ferreira, R.A.C. Discrete Fractional Calculus and Fractional Difference Equations; Springer Briefs in Mathematics; Springer: Cham, Switzerland, 2022. [Google Scholar]
- Goodrich, C.; Peterson, A.C. Discrete Fractional Calculus; Springer: Cham, Switzerland, 2015. [Google Scholar]
- Atici, F.; Eloe, P. Discrete fractional calculus with the nabla operator. Elect. J. Qual. Theory Differ. Equ. 2009, 2009, 1–12. [Google Scholar] [CrossRef]
- Ahrendt, K.; Castle, L.; Holm, M.; Yochman, K. Laplace transforms for the nabla-difference operator and a fractional variation of parameters formula. Commun. Appl. Anal. 2012, 16, 317–348. [Google Scholar]
- Bastos, N.; Torres, D. Combined delta-nabla sum operator in discrete fractional caclulus. Commun. Frac. Calc. 2010, 41–47. [Google Scholar]
- Brackins, A. Boundary Value Problems of Nabla Fractional Difference Equations. Ph.D. Thesis, The University of Nebraska—Lincoln, Lincoln, NE, USA, 2014; 92p. [Google Scholar]
- Gholami, Y.; Ghanbari, K. Coupled systems of fractional ∇-difference boundary value problems. Differ. Equ. Appl. 2016, 8, 459–470. [Google Scholar] [CrossRef]
- Jonnalagadda, J.M. On two-point Riemann-Liouville type nabla fractional boundary value problems. Adv. Dyn. Syst. Appl. 2018, 13, 141–166. [Google Scholar]
- Li, Q.; Liu, Y.; Zhou, L. Fractional boundary value problem with nabla difference equation. J. Appl. Anal. Comput. 2021, 11, 911–919. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Jia, B.; Gensler, S.; Erbe, L.; Peterson, A. Convergence of approximate solutions to nonlinear Caputo nabla fractional difference equations with boundary conditions. Electron. J. Differ. Equ. 2020, 2020, 1–19. [Google Scholar] [CrossRef]
- Chen, C.; Bohner, M.; Jia, B. Existence and uniqueness of solutions for nonlinear Caputo fractional difference equations. Turk. J. Math. 2020, 44, 857–869. [Google Scholar] [CrossRef]
- Goar, S.J. A Caputo Boundary Value Problem in Nabla Fractional Calculus. Ph.D. Thesis, The University of Nebraska—Lincoln, Lincoln, NE, USA, 2016. [Google Scholar]
- Ikram, A. Lyapunov inequalities for nabla Caputo boundary value problems. J. Differ. Equ. Appl. 2019, 25, 757–775. [Google Scholar] [CrossRef]
- Dimitrov, N.D.; Jonnalagadda, J.M. Existence of positive solutions for a class of nabla fractional boundary value problems. Fractal Fract. 2025, 9, 131. [Google Scholar] [CrossRef]
- Dimitrov, N.D.; Jonnalagadda, J.M. Existence, uniqueness and stability of solutions of a nabla fractional difference equations. Fractal Fract. 2024, 8, 591. [Google Scholar] [CrossRef]
- Cabada, A.; Dimitrov, N.; Jonnalagadda, J.M. Non-trivial solutions of non-autonomous nabla fractional difference boundary value problems. Symmetry 2021, 13, 1101. [Google Scholar] [CrossRef]
- Eralp, B.; Topal, F.S. Monotone method for discrete fractional boundary value problems. Int. J. Nonlinear Anal. Appl. 2022, 13, 1989–1997. [Google Scholar]
- Atici, F.M.; Eloe, P.W. Linear systems of fractional nabla difference equations. Rocky Mt. J. Math. 2011, 41, 353–370. [Google Scholar] [CrossRef]
- Wei, Y.; Chen, Y.; Liu, T.; Wang, Y. Lyapunov functions for nabla discrete fractional order systems. ISA Trans. 2019, 88, 82–90. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Jia, B.; Liu, X.; Erbe, L. Existence and Uniqueness Theorem of the Solution to a Class of Nonlinear Nabla Fractional Difference System with a Time Delay. Mediterr. J. Math. 2018, 15, 212. [Google Scholar] [CrossRef]
- El-Sayed, A.M.A.; Abdurahman, M.; Fouad, H.A. Existence and stability results for the integrable solution of a singular stochastic fractional-order integral equation with delay. J. Math. Comput. Sci. 2024, 33, 17–26. [Google Scholar] [CrossRef]
- Luo, M.; Qiu, W.; Nikan, O.; Avazzadeh, Z. Second-order accurate, robust and efficient ADI Galerkin technique for the three-dimensional nonlocal heat model arising in viscoelasticity. Appl. Math. Comput. 2023, 440, 127655. [Google Scholar] [CrossRef]
- Agarwal, R.P.; Meehan, M.; O’Regan, D. Fixed Point Theory and Applications; Cambridge University Press: Cambridge, UK, 2001. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).