
Fixed-Time Event-Triggered Control for High-Order Nonlinear Multi-Agent Systems Under Unknown Stochastic Time Delays


Abstract
1. Introduction
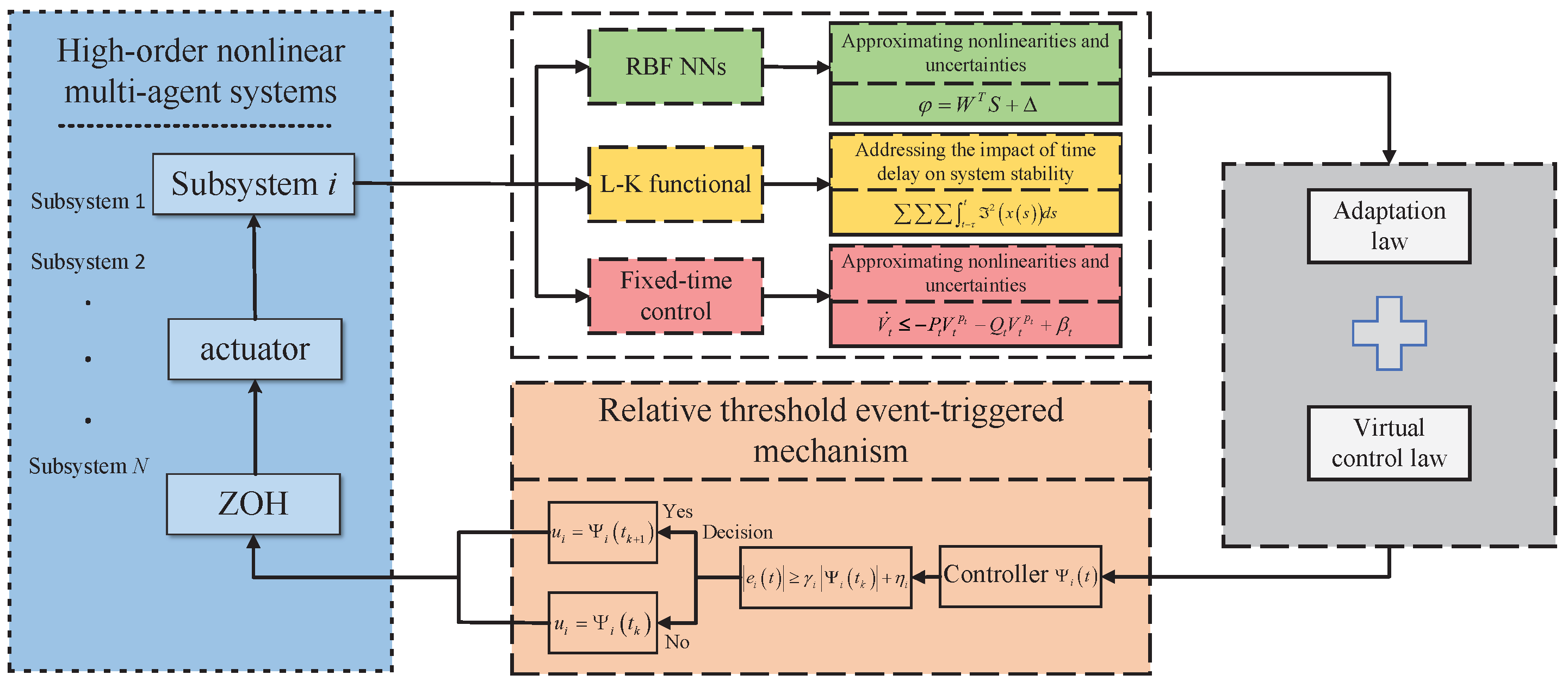
- To tackle prevalent unknown stochastic time delays in high-order nonlinear multi-agent systems, the LKF is introduced to integrate nonlinear time delay functions with the system Lyapunov function. By effectively addressing the time delay functions in the subsequent controller design process, the system exhibits robustness to time delay.
- The designed fixed-time controller ensures that the system can be semiglobal practical fixed-time stable (SPFTS), wherein the convergence time is solely determined by the designed control parameters and is independent of the system’s initial values.
2. Preliminaries and Problem Formulation
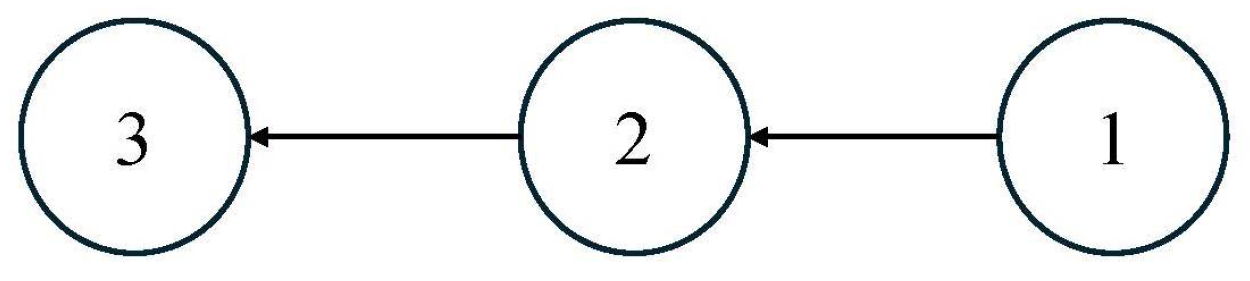
2.1. Graph Theory
2.2. Lemmas
2.3. Problem Statement
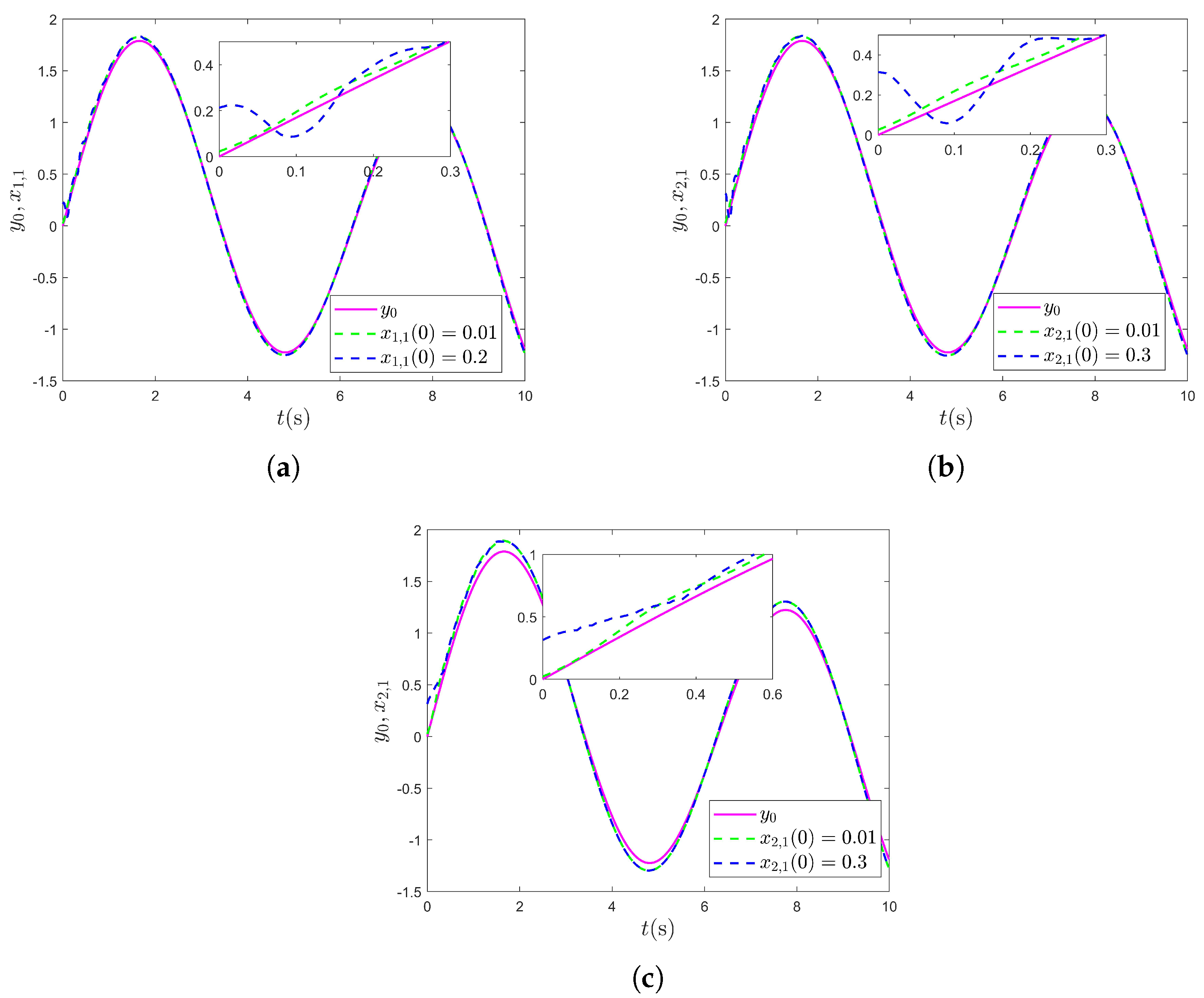
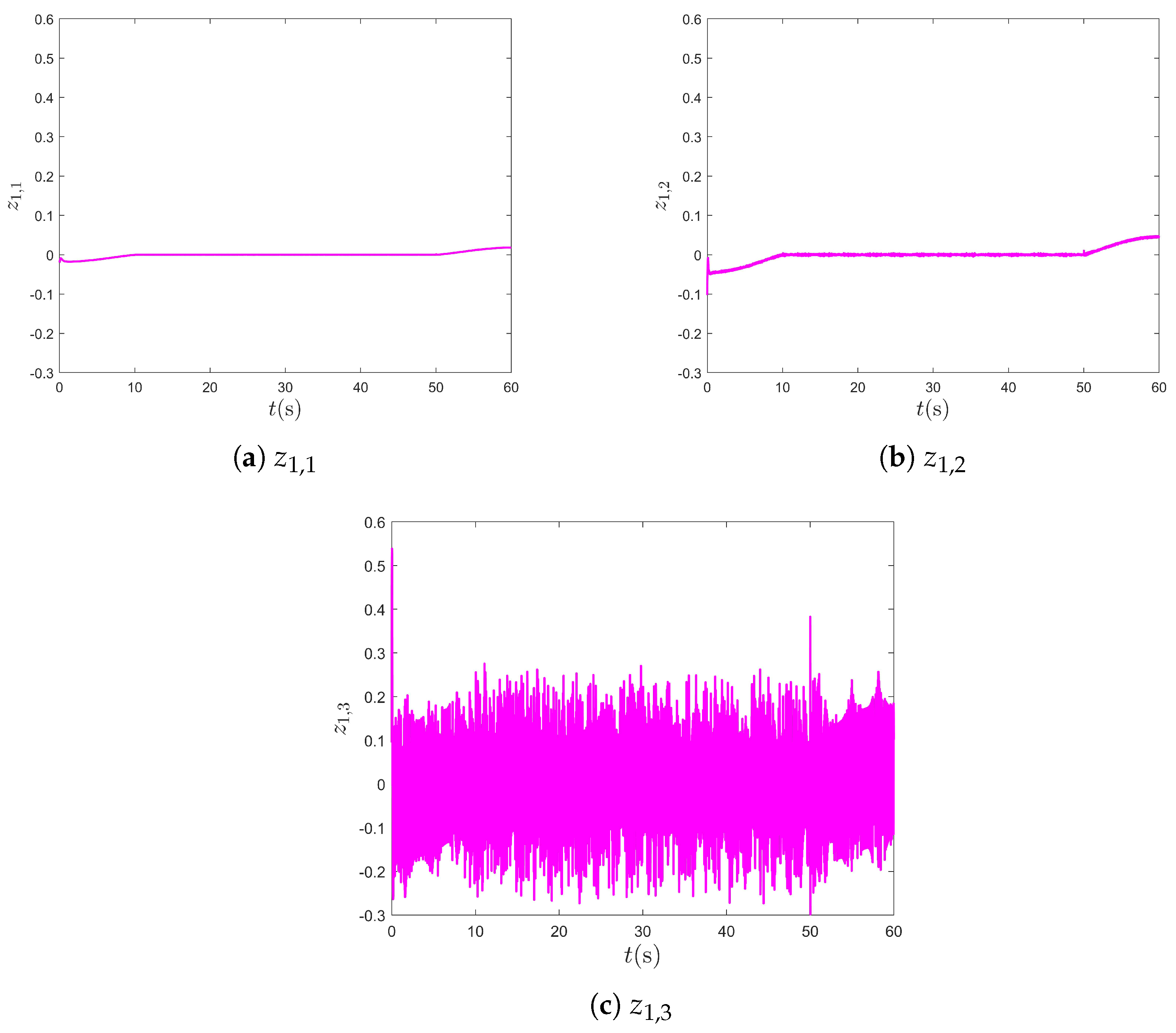
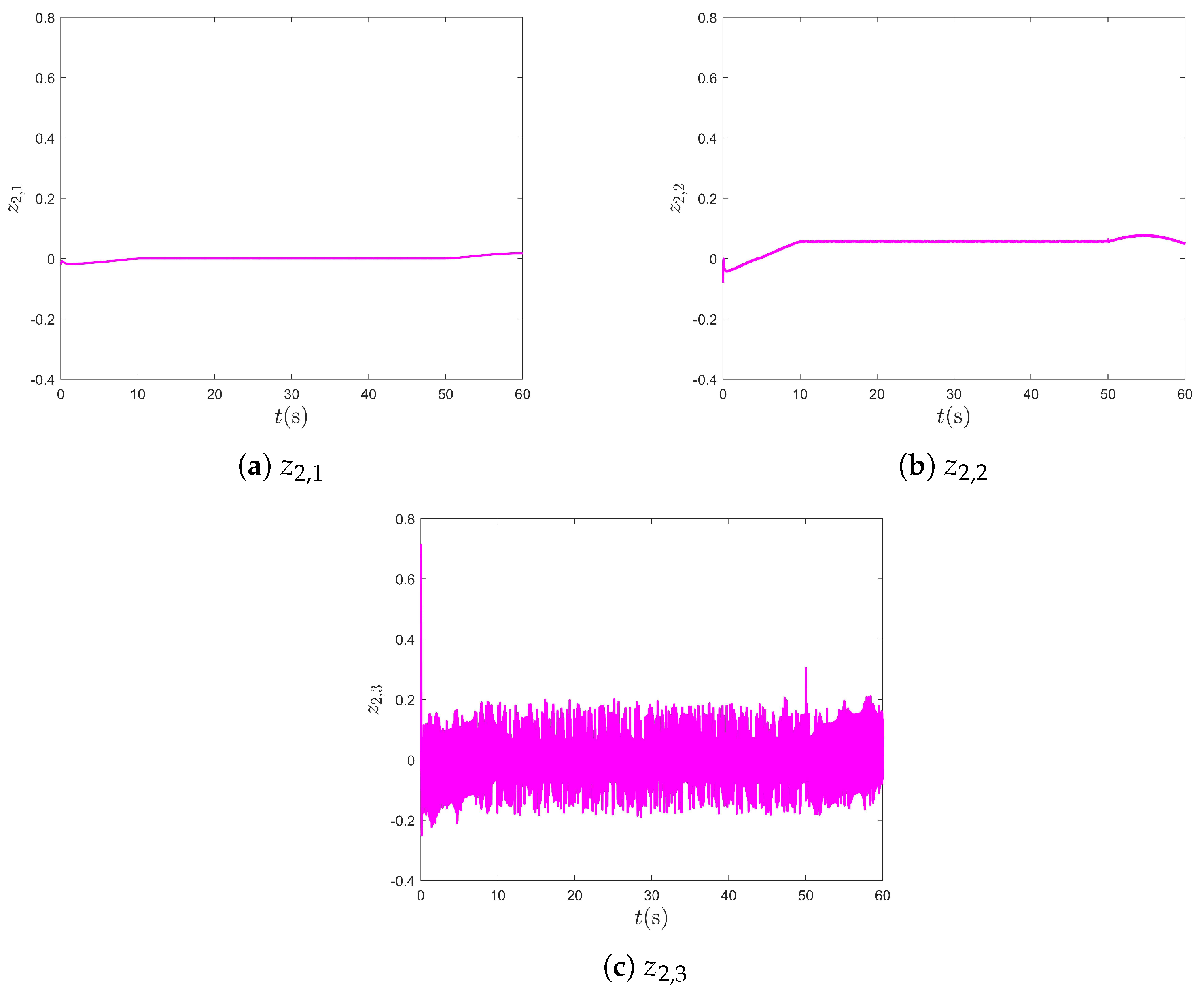
- The output can track the reference signal within a fixed time, and all the closed-loop signals are SPFTS.
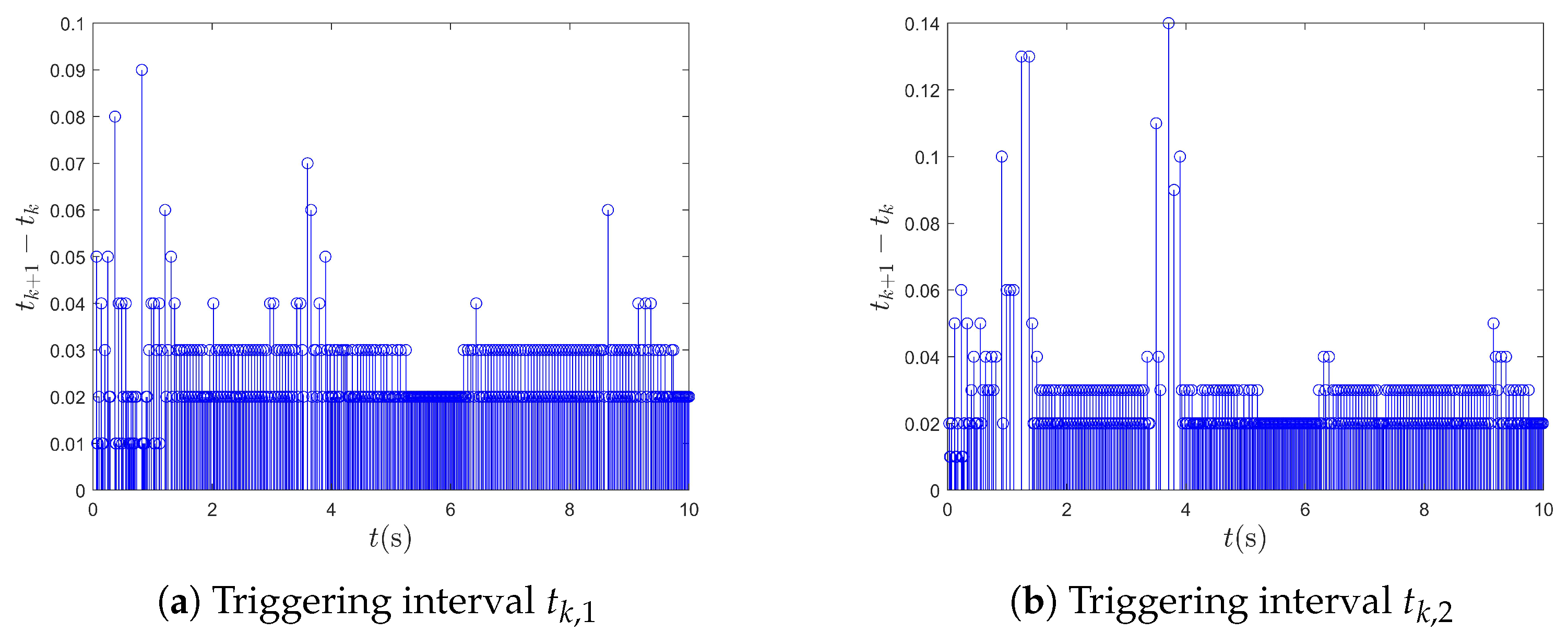
- The communication resources are significantly reduced with the introduction of the event-triggered mechanism.
- The system can remain stable in the presence of unknown stochastic time delays.
3. Main Results
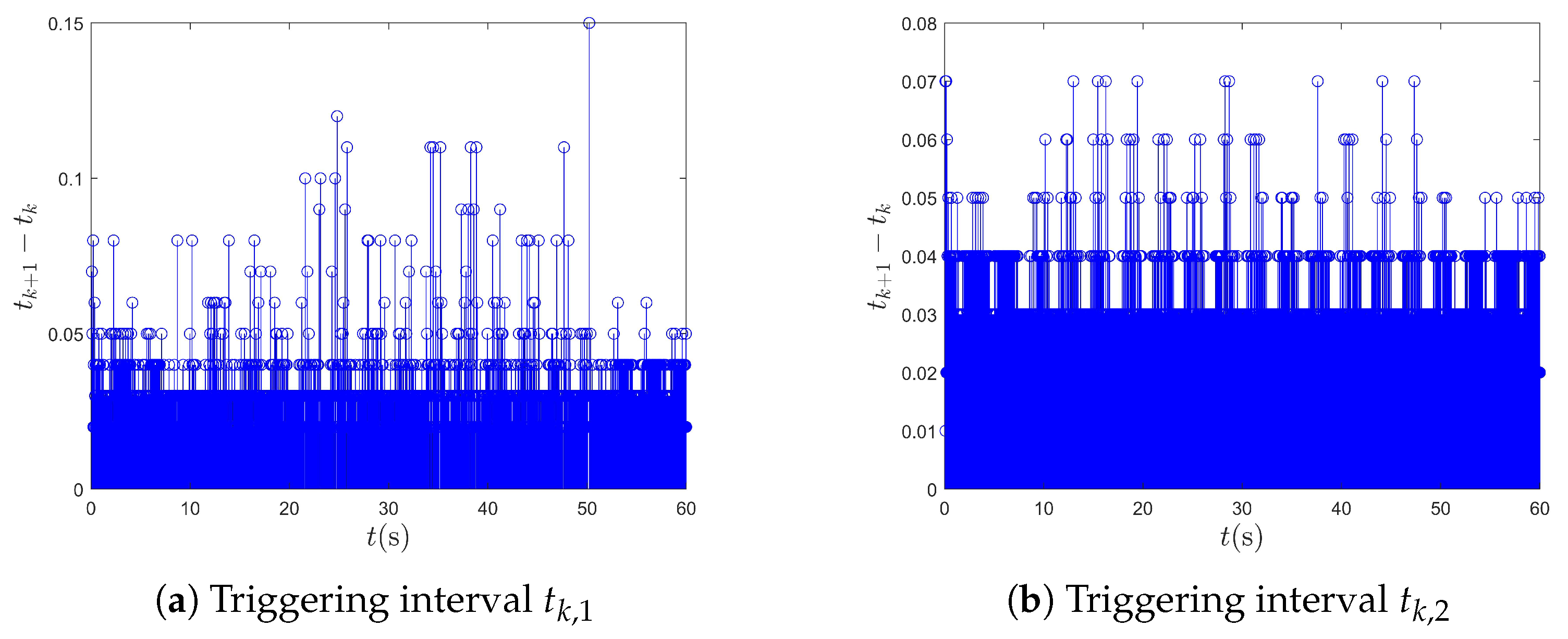
3.1. Event-Triggered Mechanism Design
3.2. Fixed-Time Event-Triggered Controller Design Under Unknown Stochastic Time Delay
3.3. Fixed-Time Stability Analysis
4. Simulation Results
4.1. Example 1
4.2. Example 2
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kumar, V.; Prasad, U.; Mohanty, S.R. Entirely coupled recurrent neural network-based backstepping control for global stability of power system networks. IEEE Trans. Autom. Sci. Eng. 2023, 21, 1647–1660. [Google Scholar] [CrossRef]
- Zuo, L.; Wang, P.; Yan, M.; Zhu, X. Platoon tracking control with road-friction based spacing policy for nonlinear vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 23, 20810–20819. [Google Scholar] [CrossRef]
- Liu, Y.; Yao, D.; Wang, L.; Lu, S. Distributed adaptive fixed-time robust platoon control for fully heterogeneous vehicles. IEEE Trans. Syst. Man Cybern.-Syst. 2023, 53, 264–274. [Google Scholar] [CrossRef]
- Ahmed, S.; Wang, H.; Tian, Y. Adaptive high-order terminal sliding mode control based on time delay estimation for the robotic manipulators with backlash hysteresis. IEEE Trans. Syst. Man Cybern.-Syst. 2021, 51, 1128–1137. [Google Scholar] [CrossRef]
- Sun, W.; Su, S.F.; Wu, Y.; Xia, J.; Nguyen, V.T. Adaptive fuzzy control with high-order barrier Lyapunov functions for high-order uncertain nonlinear systems with full-state constraints. IEEE Trans. Cybern. 2020, 50, 3424–3432. [Google Scholar] [CrossRef]
- Gao, F.; Han, Y.; Eben Li, S.; Xu, S.; Dang, D. Accurate pseudospectral optimization of nonlinear model predictive control for high-performance motion planning. IEEE Trans. Intell. Veh. 2023, 8, 1034–1045. [Google Scholar] [CrossRef]
- Sun, Z.Y.; Zhang, C.H.; Wang, Z. Adaptive disturbance attenuation for generalized high-order uncertain nonlinear systems. Automatica 2017, 80, 102–109. [Google Scholar] [CrossRef]
- Li, K.; Li, Y.; Zong, G. Adaptive Fuzzy Fixed-Time Decentralized Control for Stochastic Nonlinear Systems. IEEE Trans. Fuzzy Syst. 2021, 29, 3428–3440. [Google Scholar] [CrossRef]
- Sun, W.; Diao, S.; Su, S.F.; Sun, Z.Y. Fixed-time adaptive neural network control for nonlinear systems with input saturation. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 1911–1920. [Google Scholar] [CrossRef]
- Bai, W.; Liu, P.X.; Wang, H. Neural-Network-Based Adaptive Fixed-Time Control for Nonlinear Multiagent Non-Affine Systems. IEEE Trans. Neural Netw. Learn. Syst. 2022, 35, 570–583. [Google Scholar] [CrossRef]
- Mehraeen, S.; Jagannathan, S. Decentralized optimal control of a class of interconnected nonlinear discrete-time systems by using online Hamilton-Jacobi-Bellman formulation. IEEE Trans. Neural Netw. 2011, 22, 1757–1769. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.J.; Tong, S.; Chen, C.L.P.; Li, D.J. Neural controller design-based adaptive control for nonlinear MIMO systems with unknown hysteresis inputs. IEEE Trans. Cybern. 2016, 46, 9–19. [Google Scholar] [CrossRef]
- Si, W.; Dong, X. Barrier Lyapunov function-based decentralized adaptive neural control for uncertain high-order stochastic nonlinear interconnected systems with output constraints. J. Frankl. Inst.-Eng. Appl. Math. 2018, 355, 8484–8509. [Google Scholar] [CrossRef]
- Si, W.; Dong, X.; Yang, F. Decentralized adaptive neural prescribed performance control for high-order stochastic switched nonlinear interconnected systems with unknown system dynamics. ISA Trans. 2019, 84, 55–68. [Google Scholar] [CrossRef] [PubMed]
- Chen, M.; Wang, H.; Liu, X. Adaptive fuzzy practical fixed-time tracking control of nonlinear systems. IEEE Trans. Fuzzy Syst. 2021, 29, 664–673. [Google Scholar] [CrossRef]
- Li, Y.; Shao, X.; Tong, S. Adaptive fuzzy prescribed performance control of nontriangular structure nonlinear systems. IEEE Trans. Fuzzy Syst. 2020, 28, 2416–2426. [Google Scholar] [CrossRef]
- Liu, C.; Wang, H.; Liu, X.; Zhou, Y. Adaptive finite-time fuzzy funnel control for nonaffine nonlinear systems. IEEE Trans. Syst. Man Cybern.-Syst. 2021, 51, 2894–2903. [Google Scholar] [CrossRef]
- Cao, L.; Li, H.; Wang, N.; Zhou, Q. Observer-based event-triggered adaptive decentralized fuzzy control for nonlinear large-scale systems. IEEE Trans. Fuzzy Syst. 2019, 27, 1201–1214. [Google Scholar] [CrossRef]
- Yang, Y.; Niu, Y. Fixed-time adaptive fuzzy control for uncertain non-linear systems under event-triggered strategy. IET Control Theory A 2020, 14, 1845–1854. [Google Scholar] [CrossRef]
- Tallapragada, P.; Chopra, N. On event triggered tracking for nonlinear systems. IEEE Trans. Autom. Control 2013, 58, 2343–2348. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, X.; Liang, Z.; Li, W.; Wang, X.; Wong, P.K. Adaptive event-based robust passive fault tolerant control for nonlinear lateral stability of autonomous electric vehicles with asynchronous constraints. ISA Trans. 2022, 127, 310–323. [Google Scholar] [CrossRef] [PubMed]
- He, Z.; Fan, Y.; Wang, G.; Mu, D. Cooperative trajectory tracking control of MUSVs with periodic relative threshold event-triggered mechanism and safe distance. Ocean Eng. 2023, 269, 113541. [Google Scholar] [CrossRef]
- Yang, H.; Zhao, H.; Xia, Y.; Zhang, J. Event-triggered active MPC for nonlinear multiagent systems with packet losses. IEEE Trans. Cybern. 2021, 51, 3093–3102. [Google Scholar] [CrossRef] [PubMed]
- Sun, W.; Su, S.F.; Wu, Y.; Xia, J. Adaptive fuzzy event-triggered control for high-order nonlinear systems with prescribed performance. IEEE Trans. Cybern. 2022, 52, 2885–2895. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Yang, D.; Zhang, H.; Wang, Y.; Zhou, B. Dynamic event-based tracking control of boiler turbine systems with guaranteed performance. IEEE Trans. Autom. Sci. Eng. 2023, 21, 4272–4282. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, H.; Sun, S. Adaptive dynamic event-triggered bipartite time-varying output formation tracking problem of heterogeneous multiagent systems. IEEE Trans. Syst. Man Cybern.-Syst. 2024, 54, 12–22. [Google Scholar] [CrossRef]
- Yin, S.; Shi, P.; Yang, H. Adaptive fuzzy control of strict-feedback nonlinear time-delay systems with unmodeled dynamics. IEEE Trans. Cybern. 2016, 46, 1926–1938. [Google Scholar] [CrossRef]
- Guo-Ping, L. Predictive Control of High-Order Fully Actuated Nonlinear Systems with Time-Varying Delays. J. Syst. Sci. Complex. 2022, 35, 457–470. [Google Scholar]
- Ma, D.; Chen, J. Delay margin of low-order systems achievable by PID controllers. IEEE Trans. Autom. Control 2019, 64, 1958–1973. [Google Scholar] [CrossRef]
- Wang, Y.; Tian, J.; Liu, Y.; Yang, B.; Liu, S.; Yin, L.; Zheng, W. Adaptive neural network control of time delay teleoperation system based on model approximation. Sensors 2021, 21, 7443. [Google Scholar] [CrossRef]
- Xi, C.; Dong, J. Adaptive fuzzy reliable tracking control for a class of uncertain nonlinear time-delay systems with abrupt non-affine faults. Fuzzy Sets Syst. 2019, 374, 100–114. [Google Scholar] [CrossRef]
- Li, Z.; Li, T.; Feng, G. Adaptive neural control for a class of stochastic nonlinear time-delay systems with unknown dead zone using dynamic surface technique. Int. J. Robust Nonlinear Control 2016, 26, 759–781. [Google Scholar] [CrossRef]
- Phat, V.; Thanh, N. New criteria for finite-time stability of nonlinear fractional-order delay systems: A Gronwall inequality approach. Appl. Math. Lett. 2018, 83, 169–175. [Google Scholar] [CrossRef]
- Xie, Y.; Ma, Q.; Xu, S. Adaptive event-triggered finite-time control for uncertain time delay nonlinear system. IEEE Trans. Cybern. 2023, 53, 5928–5937. [Google Scholar] [CrossRef]
- Liu, Y.; Yao, D.; Li, H.; Lu, R. Distributed cooperative compound tracking control for a platoon of vehicles with adaptive NN. IEEE Trans. Cybern 2022, 52, 7039–7048. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, Y.; Wang, Y. Observer-based finite-time adaptive fuzzy control for nontriangular nonlinear systems with full-state constraints. IEEE Trans. Cybern 2021, 51, 1110–1120. [Google Scholar] [CrossRef]
- Cui, G.; Yu, J.; Shi, P. Observer-based finite-time adaptive fuzzy control with prescribed performance for nonstrict-feedback nonlinear systems. IEEE Trans. Fuzzy Syst. 2022, 30, 767–778. [Google Scholar] [CrossRef]
- Sun, K.; Qiu, J.; Karimi, H.R.; Fu, Y. Event-triggered robust fuzzy adaptive finite-time control of nonlinear systems with prescribed performance. IEEE Trans. Fuzzy Syst. 2021, 29, 1460–1471. [Google Scholar] [CrossRef]
- Wang, L.; Wang, H.; Liu, P.X.; Ling, S.; Liu, S. Fuzzy finite-time command filtering output feedback control of nonlinear systems. IEEE Trans. Fuzzy Syst. 2022, 30, 97–107. [Google Scholar] [CrossRef]
- Ju, C.; Son, H.I. A distributed swarm control for an agricultural multiple unmanned aerial vehicle system. Proc. Inst. Mech. Eng. Part I-J Syst Control Eng. 2019, 233, 1298–1308. [Google Scholar] [CrossRef]
- Liu, Y.; Li, H.; Lu, R.; Zuo, Z.; Li, X. An overview of finite/fixed-time control and its application in engineering systems. IEEE-CAA J. Autom. Sin. 2022, 9, 2106–2120. [Google Scholar] [CrossRef]
- Moulay, E.; Léchappé, V.; Bernuau, E.; Defoort, M.; Plestan, F. Fixed-time sliding mode control with mismatched disturbances. Automatica 2022, 136, 110009. [Google Scholar] [CrossRef]
- Peng, H.; Zhu, Q. Fixed time stability of impulsive stochastic nonlinear time-varying systems. Int. J. Robust Nonlinear Control 2023, 33, 3699–3714. [Google Scholar] [CrossRef]
- Yang, P.; Wang, X.; Chen, X.; Du, S. Fixed time event-triggered control for high-order nonlinear uncertain systems with time-varying full state constraints. Int. J. Robust Nonlinear Control. 2024, 34, 703–727. [Google Scholar] [CrossRef]
- Huang, C.; Liu, Z.; Chen, C.L.P.; Zhang, Y. Adaptive fixed-time neural control for uncertain nonlinear multiagent systems. IEEE Trans. Neural Netw. Learn. Syst. 2022, 34, 10346–10358. [Google Scholar] [CrossRef]
- Qiu, J.; Sun, K.; Wang, T.; Gao, H. Observer-based fuzzy adaptive event-triggered control for pure-feedback nonlinear systems with prescribed performance. IEEE Trans. Fuzzy Syst. 2019, 27, 2152–2162. [Google Scholar] [CrossRef]
- Yang, G.; Yao, J.; Ullah, N. Neuroadaptive control of saturated nonlinear systems with disturbance compensation. ISA Trans. 2022, 122, 49–62. [Google Scholar] [CrossRef]
- Labbadi, M.; Cherkaoui, M. Robust adaptive nonsingular fast terminal sliding-mode tracking control for an uncertain quadrotor UAV subjected to disturbances. ISA Trans. 2020, 99, 290–304. [Google Scholar] [CrossRef]
- Cai, J.; Mei, C.; Yan, Q. Semi-global adaptive backstepping control for parametric strict-feedback systems with non-triangular structural uncertainties. ISA Trans. 2022, 126, 180–189. [Google Scholar] [CrossRef]
- Yang, G.; Yao, J. Output feedback control of electro-hydraulic servo actuators with matched and mismatched disturbances rejection. J. Frankl. Inst.-Eng. Appl. Math. 2019, 356, 9152–9179. [Google Scholar] [CrossRef]
- Liu, Y.; Zeng, B.; Zhu, Q.; Liu, D. Fuzzy-based adaptive control design for stochastic nonlinear time-delay systems via event-triggered mechanism. Int. J. Adapt. Control Signal Process. 2022, 36, 2344–2363. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sampling Times | NET | Percentage | |
|---|---|---|---|
| Sub1 | 1000 | 387 | 38.7% |
| Sub2 | 1000 | 216 | 21.6% |
| Literature [5] | 1000 | 1000 | 100% |
| Sampling Times | NET | Percentage | |
|---|---|---|---|
| Vehicle 1 | 6000 | 2547 | 42.45% |
| Vehicle 2 | 6000 | 1275 | 21.25% |
| Literature [3] | 6000 | 6000 | 100% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Han, H.; Ma, Y.; Yan, M. Fixed-Time Event-Triggered Control for High-Order Nonlinear Multi-Agent Systems Under Unknown Stochastic Time Delays. Mathematics 2025, 13, 1639. https://doi.org/10.3390/math13101639
Liu J, Han H, Ma Y, Yan M. Fixed-Time Event-Triggered Control for High-Order Nonlinear Multi-Agent Systems Under Unknown Stochastic Time Delays. Mathematics. 2025; 13(10):1639. https://doi.org/10.3390/math13101639
Chicago/Turabian StyleLiu, Junyi, Hongbo Han, Yuncong Ma, and Maode Yan. 2025. "Fixed-Time Event-Triggered Control for High-Order Nonlinear Multi-Agent Systems Under Unknown Stochastic Time Delays" Mathematics 13, no. 10: 1639. https://doi.org/10.3390/math13101639
APA StyleLiu, J., Han, H., Ma, Y., & Yan, M. (2025). Fixed-Time Event-Triggered Control for High-Order Nonlinear Multi-Agent Systems Under Unknown Stochastic Time Delays. Mathematics, 13(10), 1639. https://doi.org/10.3390/math13101639