

Upper Limb Joint Angle Estimation Using Wearable IMUs and Personalized Calibration Algorithm
 ,
,
Abstract
1. Introduction
2. Materials and Methods
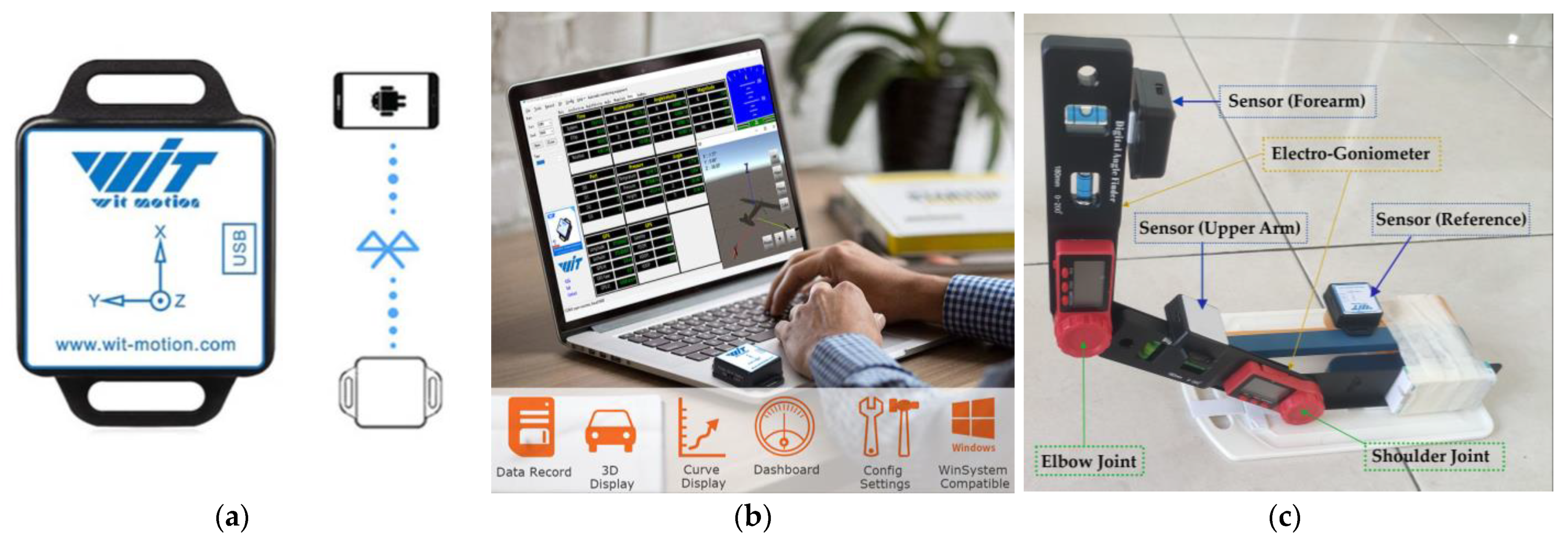
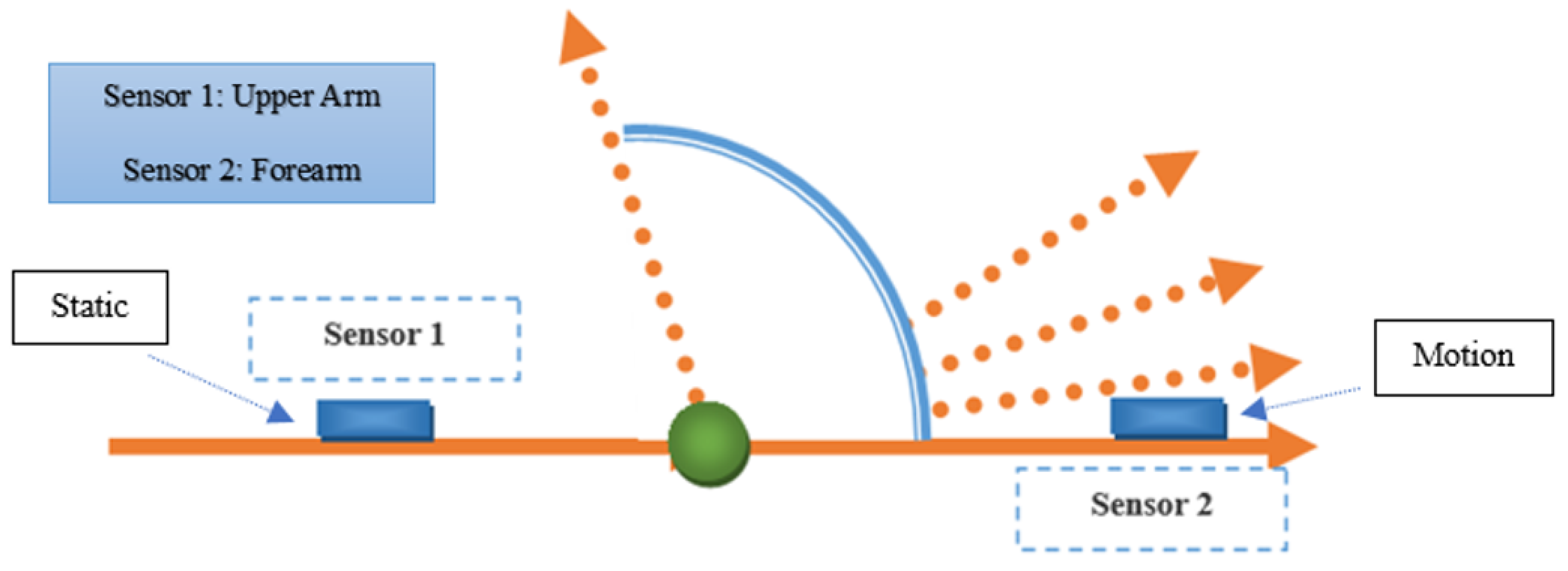
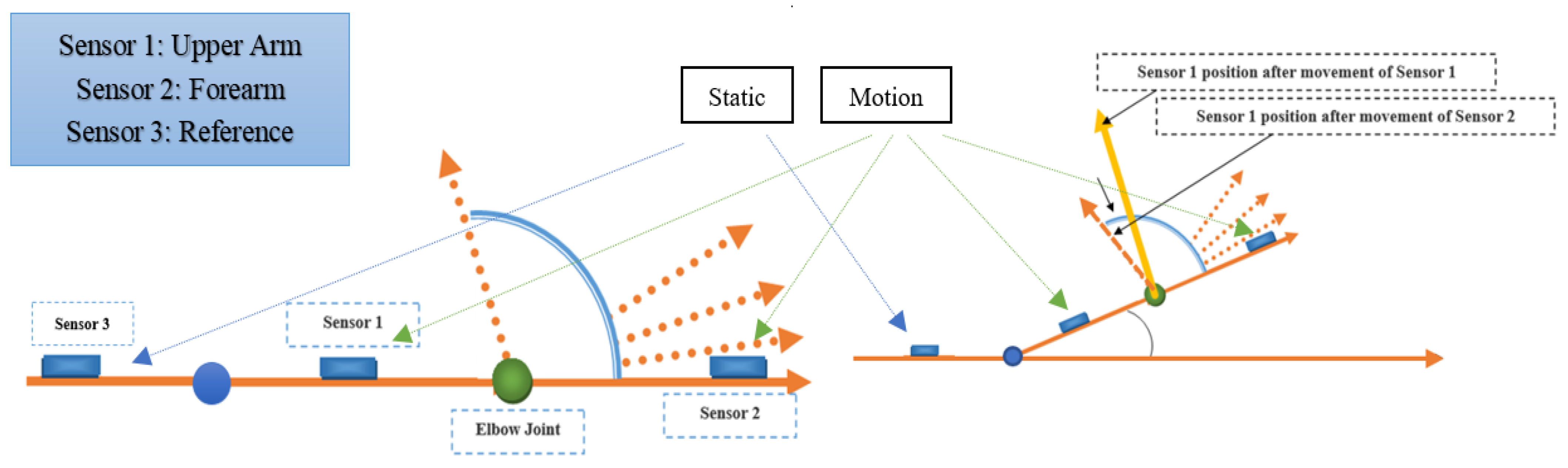
2.1. Experimental Scenario and Platform
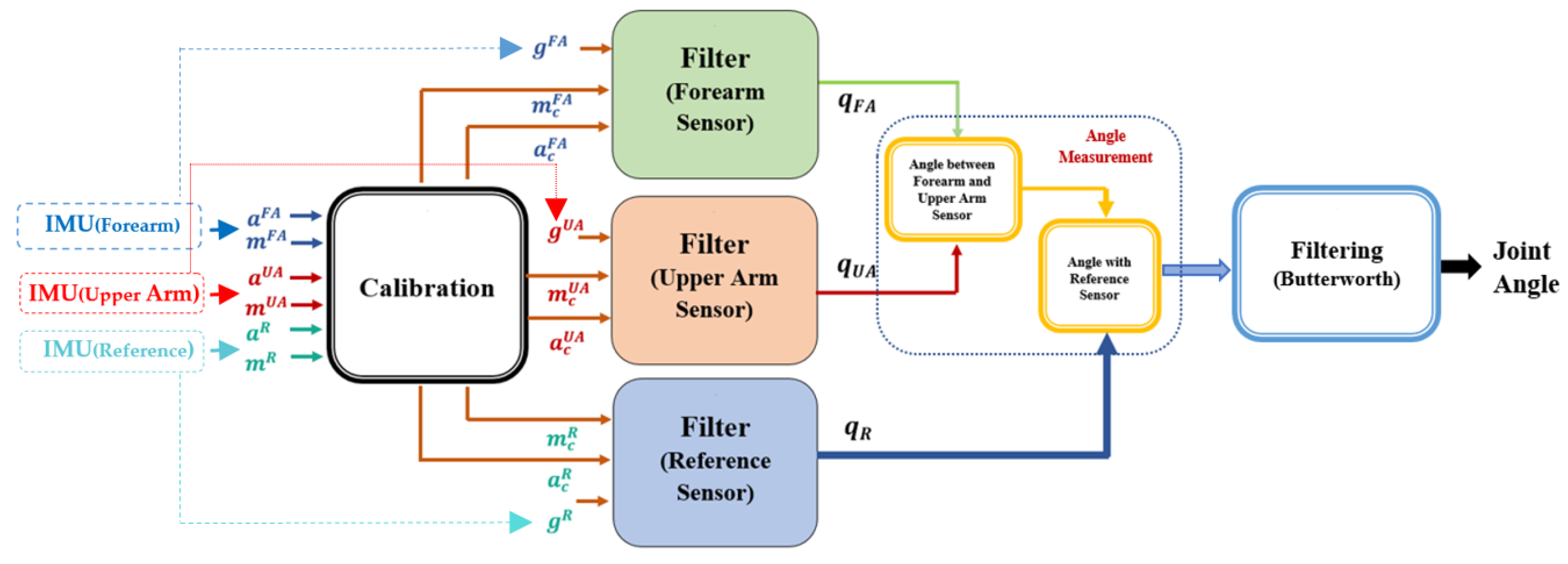
2.2. Joint Angle Measurement Algorithm
| Algorithm 1 Proposed Joint Angle Measurement Algorithm |
| 1 Initialization and calibration of the forearm, upper arm, and reference sensor: Accelerometer data: Gyroscope data: Magnetometer data: 2 Collection of Accelerometer, Gyroscope, and Magnetometer raw data 3 Measurement of bias correction vector () from acceleration data 4 Calibration of Accelerometer data using bias correction vector: 5 Conversion of Magnetometer data () from local frame to global frame 6 Calibration and correction of the Magnetometer data in global frame: 7 First Stage: Use of Madgwick filter for all three sensors‘ orientation estimation Output: Forearm Sensor Upper Arm Sensor Reference Sensor 8 Second Stage: Calculation of Joint Angle (θ) from the three quaternions 9 Filtering of Joint Angle () using Fourth-Order Butterworth Filter |
2.2.1. Calibration
2.2.2. First Stage: Estimation of Orientation from Sensor Fusion Technique
| Algorithm 2 Madgwick Filter [32] |
| First Step: Computation of the orientation from the gyroscope. Gyroscope measurement: Quaternion derivative: Orientation from Gyroscope, Second Step: Use of accelerometer data to get the orientation quaternion. Sensor Orientation: Predefined reference direction of the field in the earth frame: Measurement of the field in the sensor frame, The sensor orientation can be formulated as an optimization problem by where the objective function can be calculated by Using Gradient Descent algorithm, estimated orientation based on previous one and step size: where For accelerometer, the Objective function and the Jacobian matrix are and . Third Step: Use of magnetometer data. Earth’s magnetic field: Magnetometer measurement: For Magnetometer the Objective function and the Jacobian matrix are and respectively. Complete solution considering accelerometer and magnetometer: Objective function: Jacobian matrix: = Estimated Orientation, where, = and Final Step: Final estimation of the orientation: The simple expression after some simplifications and assumptions: |
2.2.3. Second Stage: Measurement of Angle
2.2.4. Filtering
3. Results and Discussion
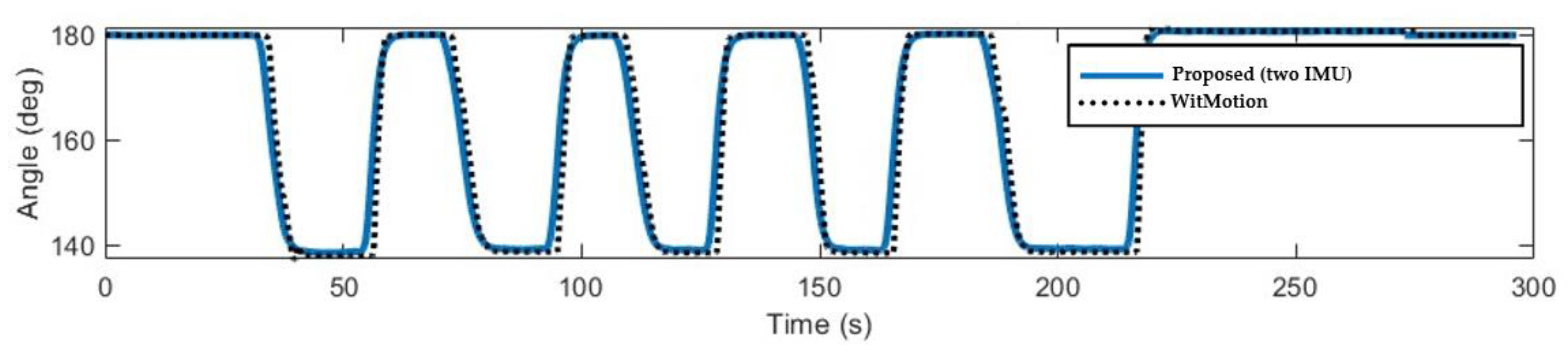
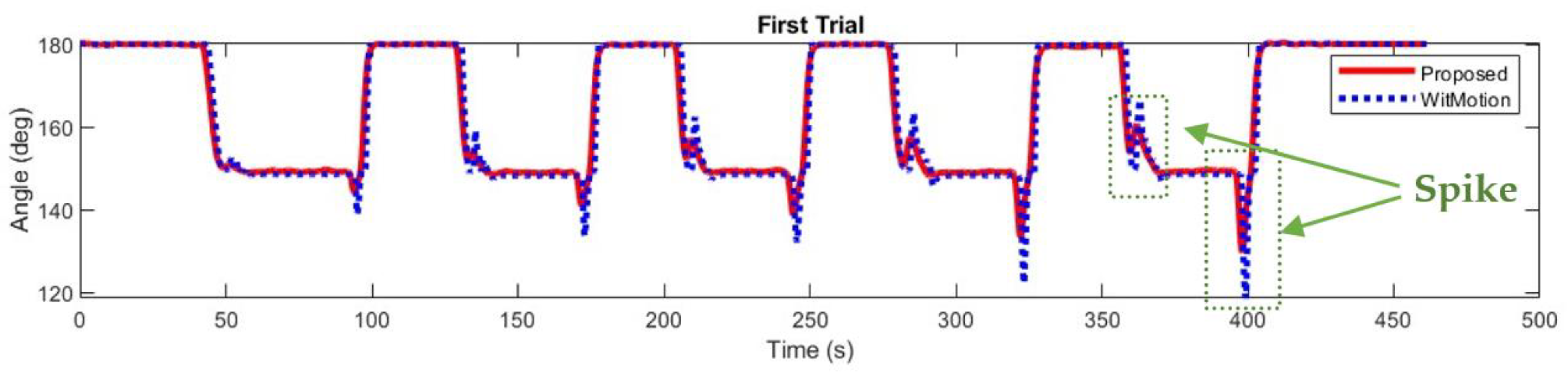
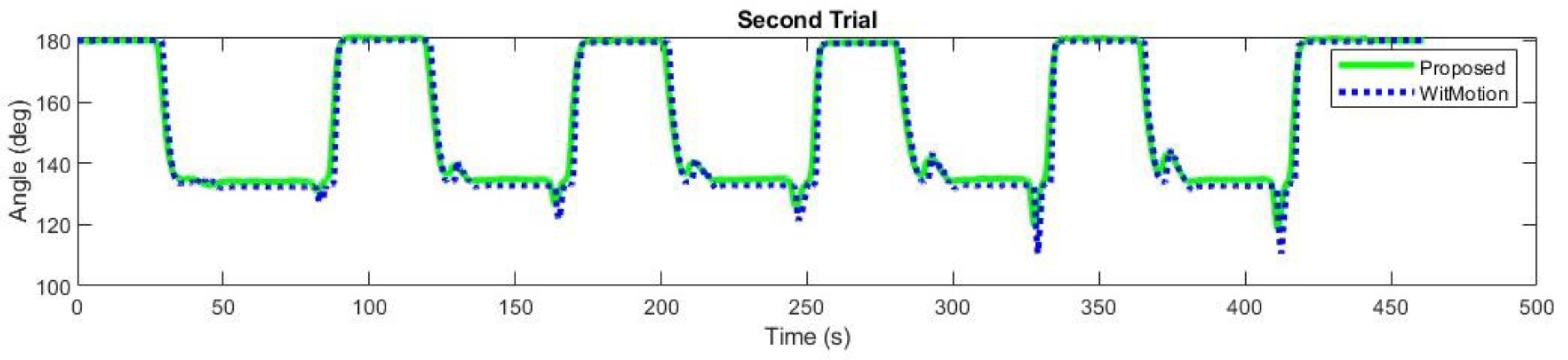
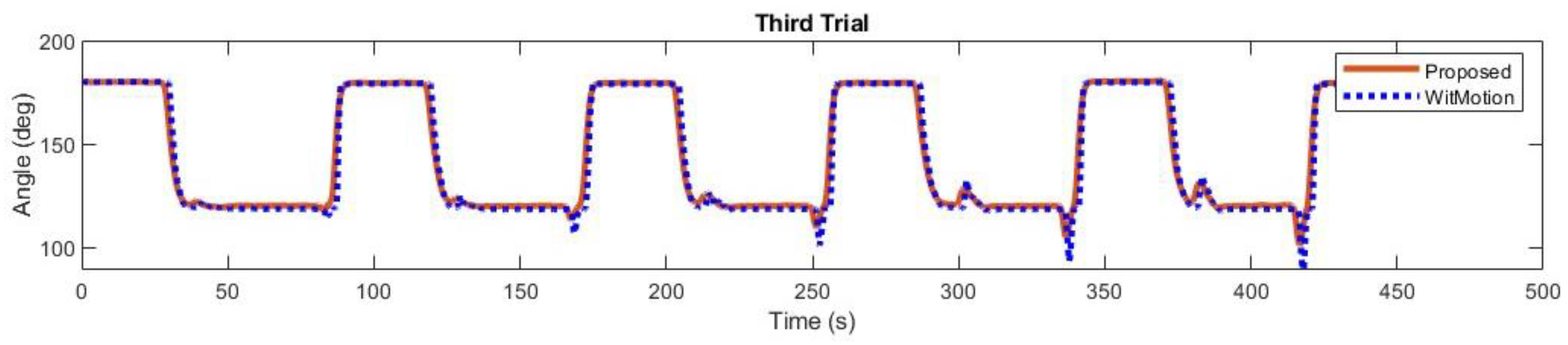
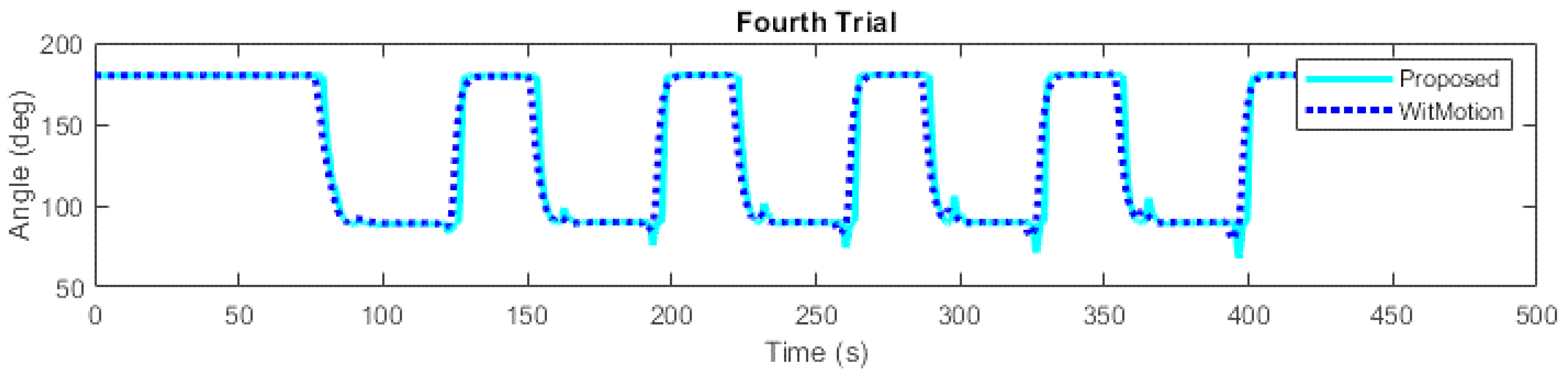
3.1. Joint Angle Measurement
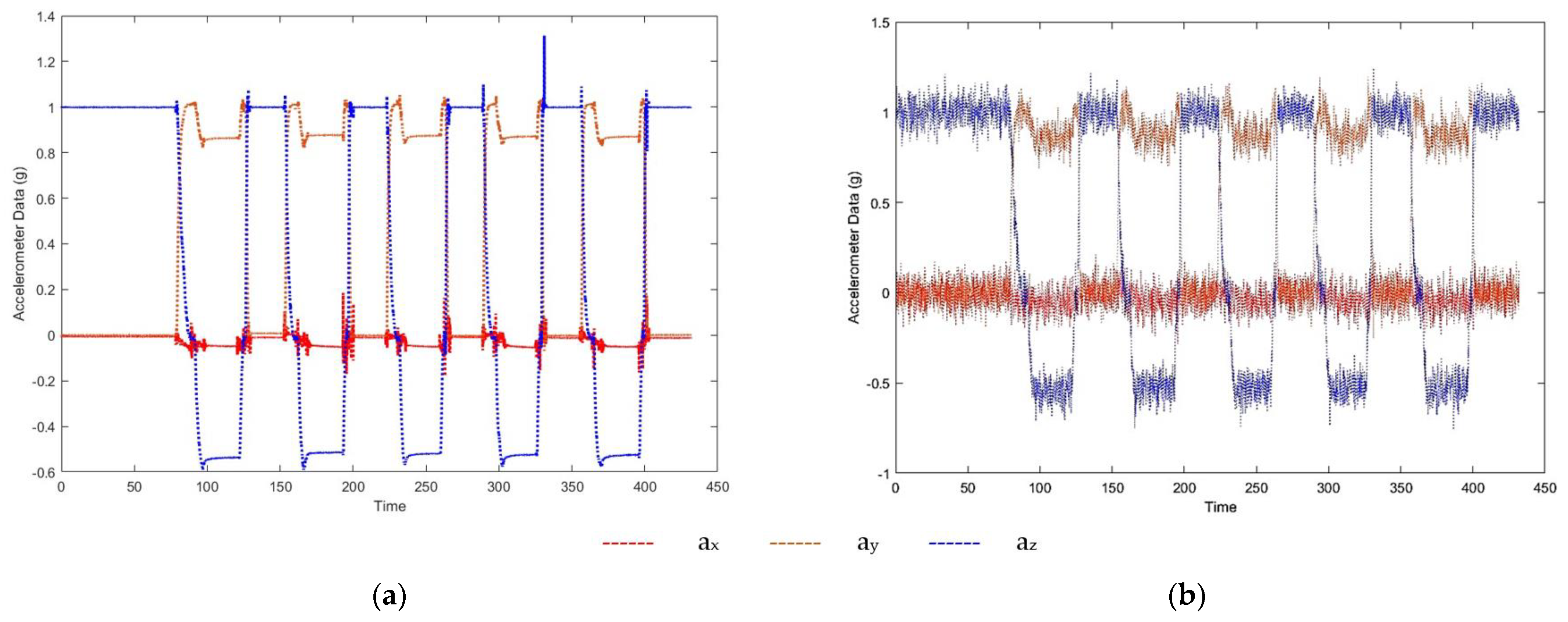
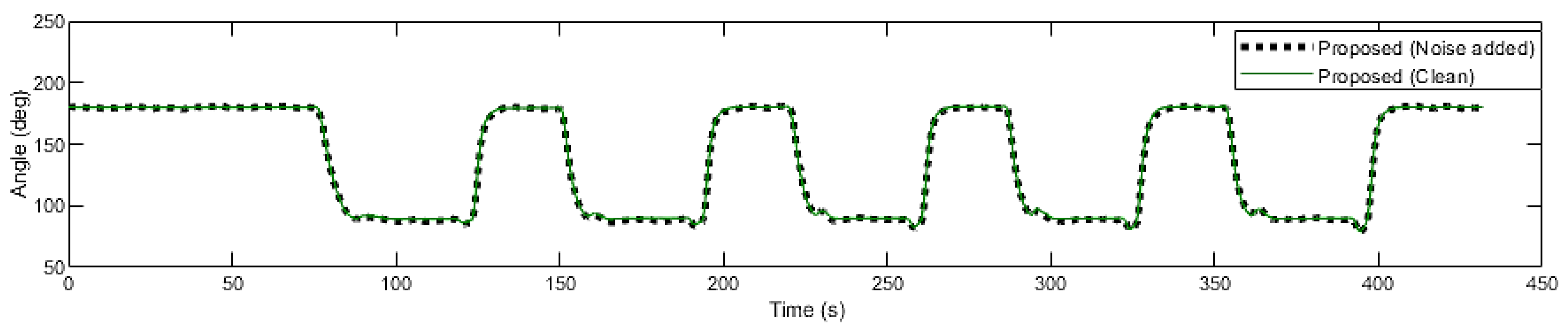
3.2. Joint Angle Measurement Considering External Acceleration
3.3. Limitations
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ramlee, M.H.; Beng, G.K.; Bajuri, N.; Abdul Kadir, M.R. Finite element analysis of the wrist in stroke patients: The effects of hand grip. Med. Biol. Eng. Comput. 2018, 56, 1161–1171. [Google Scholar] [CrossRef] [PubMed]
- Ponvel, P.; Singh, D.K.A.; Beng, G.K.; Chai, S.C. Factors affecting upper extremity kinematics in healthy adults: A systematic review. Crit. Rev. Phys. Rehabil. Med. 2019, 31, 101–123. [Google Scholar] [CrossRef]
- Ramlee, M.H.; Gan, K.B. Function and biomechanics of upper limb in post-stroke patients—A systematic review. J. Mech. Med. Biol. 2017, 17, 1750099. [Google Scholar] [CrossRef]
- Faisal, A.I.; Majumder, S.; Mondal, T.; Cowan, D.; Naseh, S.; Deen, M.J. Monitoring methods of human body joints: State-of-the-art and research challenges. Sensors 2019, 19, 2629. [Google Scholar] [CrossRef] [PubMed]
- Zheng, R.; Zhang, Y.; Zhang, K.; Yuan, Y.; Jia, S.; Liu, J. The Complement System, Aging, and Aging-Related Diseases. Int. J. Mol. Sci. 2022, 23, 8689. [Google Scholar] [CrossRef] [PubMed]
- McGrath, T.; Stirling, L. Body-Worn IMU-Based Human Hip and Knee Kinematics Estimation during Treadmill Walking. Sensors 2022, 22, 2544. [Google Scholar] [CrossRef] [PubMed]
- Vincent, A.C.; Furman, H.; Slepian, R.C.; Ammann, K.R.; Maria, C.D.; Chien, J.H.; Siu, K.C.; Slepian, M.J. Smart Phone-Based Motion Capture and Analysis: Importance of Operating Envelope Definition and Application to Clinical Use. Appl. Sci. 2022, 12, 6173. [Google Scholar] [CrossRef]
- Lee, J.K.; Jung, W.C. Quaternion-based local frame alignment between an inertial measurement unit and a motion capture system. Sensors 2018, 18, 4003. [Google Scholar] [CrossRef]
- Li, J.; Liu, X.; Wang, Z.; Zhao, H.; Zhang, T.; Qiu, S.; Zhou, X.; Cai, H.; Ni, R.; Cangelosi, A. Real-Time Human Motion Capture Based on Wearable Inertial Sensor Networks. IEEE Internet Things J. 2022, 9, 8953–8966. [Google Scholar] [CrossRef]
- Sung, J.; Han, S.; Park, H.; Cho, H.M.; Hwang, S.; Park, J.W.; Youn, I. Prediction of lower extremity multi-joint angles during overground walking by using a single IMU with a low frequency based on an LSTM recurrent neural network. Sensors 2022, 22, 53. [Google Scholar] [CrossRef]
- Basso, M.; Galanti, M.; Innocenti, G.; Miceli, D. Pedestrian Dead Reckoning Based on Frequency Self-Synchronization and Body Kinematics. IEEE Sens. J. 2017, 17, 534–545. [Google Scholar] [CrossRef]
- Majumder, S.; Mondal, T.; Deen, M.J. A Simple, Low-Cost and Efficient Gait Analyzer for Wearable Healthcare Applications. IEEE Sens. J. 2019, 19, 2320–2329. [Google Scholar] [CrossRef]
- Majumder, S.; Member, G.S.; Deen, M.J.; Fellow, L. Wearable IMU-Based System for Real-Time Monitoring of Lower-Limb Joints. IEEE Sens. J. 2021, 21, 8267–8275. [Google Scholar] [CrossRef]
- Shuai, Z.; Dong, A.; Liu, H.; Cui, Y. Reliability and Validity of an Inertial Measurement System to Quantify Lower Extremity Joint Angle in Functional Movements. Sensors 2022, 22, 863. [Google Scholar] [CrossRef]
- Al-Amri, M.; Nicholas, K.; Button, K.; Sparkes, V.; Sheeran, L.; Davies, J.L. Inertial measurement units for clinical movement analysis: Reliability and concurrent validity. Sensors 2018, 18, 719. [Google Scholar] [CrossRef]
- Brouwer, N.P.; Yeung, T.; Bobbert, M.F.; Besier, T.F. 3D trunk orientation measured using inertial measurement units during anatomical and dynamic sports motions. Scand. J. Med. Sci. Sport. 2021, 31, 358–370. [Google Scholar] [CrossRef]
- Lim, X.Y.; Gan, K.B.; Aziz, N.A.A. Deep convlstm network with dataset resampling for upper body activity recognition using minimal number of imu sensors. Appl. Sci. 2021, 11, 3543. [Google Scholar] [CrossRef]
- Majumder, S.; Mondal, T.; Deen, M.J. Wearable sensors for remote health monitoring. Sensors 2017, 17, 130. [Google Scholar] [CrossRef]
- Majumder, S.; Aghayi, E.; Noferesti, M.; Memarzadeh-Tehran, H.; Mondal, T.; Pang, Z.; Deen, M.J. Smart homes for elderly healthcare—Recent advances and research challenges. Sensors 2017, 17, 2496. [Google Scholar] [CrossRef]
- Vijayan, V.; Connolly, J.; Condell, J.; McKelvey, N.; Gardiner, P. Review of wearable devices and data collection considerations for connected health. Sensors 2021, 21, 5589. [Google Scholar] [CrossRef]
- Longo, U.G.; De Salvatore, S.; Sassi, M.; Carnevale, A.; De Luca, G.; Denaro, V. Motion Tracking Algorithms Based on Wearable Inertial Sensor: A Focus on Shoulder. Electronics 2022, 11, 1741. [Google Scholar] [CrossRef]
- Rigoni, M.; Gill, S.; Babazadeh, S.; Elsewaisy, O.; Gillies, H.; Nguyen, N.; Pathirana, P.N.; Page, R. Assessment of shoulder range of motion using a wireless inertial motion capture device—A validation study. Sensors 2019, 19, 1781. [Google Scholar] [CrossRef] [PubMed]
- Chiella, A.C.B.; Teixeira, B.O.S.; Pereira, G.A.S. Quaternion-based robust attitude estimation using an adaptive unscented Kalman filter. Sensors 2019, 19, 2372. [Google Scholar] [CrossRef] [PubMed]
- Yuan, X.; Yu, S.; Zhang, S.; Wang, G.; Liu, S. Quaternion-based unscented kalman filter for accurate indoor heading estimation using wearable multi-sensor system. Sensors 2015, 15, 10872–10890. [Google Scholar] [CrossRef]
- Kottath, R.; Poddar, S.; Das, A.; Kumar, V. Window based Multiple Model Adaptive Estimation for Navigational Framework. Aerosp. Sci. Technol. 2016, 50, 88–95. [Google Scholar] [CrossRef]
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Fluids Eng. Trans. ASME 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Wu, J.; Zhou, Z.; Fourati, H.; Li, R.; Liu, M. Generalized Linear Quaternion Complementary Filter for Attitude Estimation From Multisensor Observations: An Optimization Approach. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1330–1343. [Google Scholar] [CrossRef]
- Urrea, C.; Agramonte, R. Kalman Filter: Historical Overview and Review of Its Use in Robotics 60 Years after Its Creation. J. Sensors 2021, 2021, 9674015. [Google Scholar] [CrossRef]
- Kim, J.; Lee, K. Unscented kalman filter-aided long short-term memory approach for wind nowcasting. Aerospace 2021, 8, 236. [Google Scholar] [CrossRef]
- Poddar, S.; Narkhede, P.; Kumar, V.; Kumar, A. PSO Aided Adaptive Complementary Filter for Attitude Estimation. J. Intell. Robot. Syst. Theory Appl. 2017, 87, 531–543. [Google Scholar] [CrossRef]
- Kottath, R.; Narkhede, P.; Kumar, V.; Karar, V.; Poddar, S. Multiple Model Adaptive Complementary Filter for Attitude Estimation. Aerosp. Sci. Technol. 2017, 69, 574–581. [Google Scholar] [CrossRef]
- Madgwick, S.O.H.; Harrison, A.J.L.; Vaidyanathan, R. Estimation of IMU and MARG orientation using a gradient descent algorithm ACT Profile Report: State. Graduating Class 2012. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; pp. 1–7. [Google Scholar]
- Mahony, R.; Hamel, T.; Morin, P.; Malis, E. Nonlinear complementary filters on the special linear group. Int. J. Control 2012, 85, 1557–1573. [Google Scholar] [CrossRef]
- Ludwig, S.A.; Burnham, K.D. Comparison of Euler Estimate using Extended Kalman Filter, Madgwick and Mahony on Quadcopter Flight Data. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; pp. 1236–1241. [Google Scholar] [CrossRef]
- Fayat, R.; Betancourt, V.D.; Goyallon, T.; Petremann, M.; Liaudet, P.; Descossy, V.; Reveret, L.; Dugué, G.P. Inertial measurement of head tilt in rodents: Principles and applications to vestibular research. Sensors 2021, 21, 6318. [Google Scholar] [CrossRef] [PubMed]
- Rahman, M.M.; Gan, K.B. Range of Motion Measurement Using Single Inertial Measurement Unit Sensor: A Validation and Comparative Study of Sensor Fusion Techniques. In Proceedings of the IEEE 20th Student Conference on Research and Development (SCOReD), Bangi, Malaysia, 8–9 November 2022; pp. 114–118. [Google Scholar] [CrossRef]
- Li, R.; Fu, C.; Yi, W.; Yi, X. Calib-Net: Calibrating the Low-Cost IMU via Deep Convolutional Neural Network. Front. Robot. AI 2022, 8, 772583. [Google Scholar] [CrossRef]
- Bao, Q. A Field Calibration Method for Low-Cost MEMS Accelerometer Based on the Generalized Nonlinear Least Square Method. Multiscale Sci. Eng. 2020, 2, 135–142. [Google Scholar] [CrossRef]
- Soriano, M.A.; Khan, F.; Ahmad, R. Two-Axis Accelerometer Calibration and Nonlinear Correction Using Neural Networks: Design, Optimization, and Experimental Evaluation. IEEE Trans. Instrum. Meas. 2020, 69, 6787–6794. [Google Scholar] [CrossRef]
- Sarkka, O.; Nieminen, T.; Suuriniemi, S.; Kettunen, L. A Multi-Position Calibration Method for Consumer-Grade Accelerometers, Gyroscopes, and Magnetometers to Field Conditions. IEEE Sens. J. 2017, 17, 3470–3481. [Google Scholar] [CrossRef]
- Wang, S.M.; Meng, N. A new Multi-position calibration method for gyroscope’s drift coefficients on centrifuge. Aerosp. Sci. Technol. 2017, 68, 104–108. [Google Scholar] [CrossRef]
- Ding, Z.; Cai, H.; Yang, H. An improved multi-position calibration method for low cost micro-electro mechanical systems inertial measurement units. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2015, 229, 1919–1930. [Google Scholar] [CrossRef]
- Franco, T.; Sestrem, L.; Henriques, P.R.; Alves, P.; Varanda Pereira, M.J.; Brandão, D.; Leitão, P.; Silva, A. Motion Sensors for Knee Angle Recognition in Muscle Rehabilitation Solutions. Sensors 2022, 22, 7605. [Google Scholar] [CrossRef]
- Woods, C.; Vikas, V. Joint angle estimation using accelerometer arrays and model-based filtering. IEEE Sens. J. 2022, 22, 19786–19796. [Google Scholar] [CrossRef]
- Tuan, C.C.; Wu, Y.C.; Yeh, W.L.; Wang, C.C.; Lu, C.H.; Wang, S.W.; Yang, J.; Lee, T.F.; Kao, H.K. Development of Joint Activity Angle Measurement and Cloud Data Storage System. Sensors 2022, 22, 4684. [Google Scholar] [CrossRef]
- González-Alonso, J.; Oviedo-Pastor, D.; Aguado, H.J.; Díaz-Pernas, F.J.; González-Ortega, D.; Martínez-Zarzuela, M. Custom imu-based wearable system for robust 2.4 ghz wireless human body parts orientation tracking and 3d movement visualization on an avatar. Sensors 2021, 21, 6642. [Google Scholar] [CrossRef] [PubMed]
- Nirmal, K.; Sreejith, A.G.; Mathew, J.; Sarpotdar, M.; Suresh, A.; Prakash, A.; Safonova, M.; Murthy, J. Noise modeling and analysis of an IMU-based attitude sensor: Improvement of performance by filtering and sensor fusion. Adv. Opt. Mech. Technol. Telesc. Instrum. II 2016, 9912, 99126W. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Technical Specification |
|---|---|
| Dimension | 51.3 mm × 36 mm × 15 mm |
| Net Weight | 20 g |
| Chip | nRF52832 Bluetooth chip |
| Processor | Cortex-M0 core processor |
| IMU | MPU9250 |
| Voltage | 3.3–5 V |
| Output | 3-axis Acceleration + Angle + Angular Velocity + Magnetic Field + Quaternion |
| Range | Acceleration (±16 g), Gyroscope (±2000°/s), Magnet Field (±4900 µT) |
| Angle Accuracy | X, Y-axis: 0.05° (Static) X, Y-axis: 0.1° (Dynamic) |
| Ref. | Year | Shortcomings of Calibration Process (Previous Literature) | Advantages of Proposed Calibration Process |
|---|---|---|---|
| [14] | 2022 |
|
|
| [37] | 2022 |
| |
| [38] | 2020 |
| |
| [39] | 2020 |
| |
| [40] | 2017 |
| |
| [41] | 2017 |
| |
| [42] | 2015 |
|
| EG | PA | WM | Error (PA) | Error (WM) | RMSE (PA) | RMSE (WM) |
|---|---|---|---|---|---|---|
| 139.25 | 139.55 | 138.86 | −0.3 | 0.39 | 0.26 | 0.43 |
| 139.5 | 139.72 | 139.01 | −0.22 | 0.49 | ||
| 139.2 | 139.38 | 138.75 | −0.18 | 0.45 | ||
| 139.65 | 139.93 | 139.23 | −0.28 | 0.42 | ||
| 139.2 | 139.51 | 138.82 | −0.31 | 0.38 |
| EG | PA | WM | Error (PA) | Error (WM) | RMSE (PA) | RMSE (WM) |
|---|---|---|---|---|---|---|
| 149.70 | 149.32 | 148.53 | −0.38 | −1.17 | 0.46 | 1.19 |
| 149.40 | 148.91 | 148.23 | −0.49 | −1.17 | ||
| 149.65 | 149.23 | 148.49 | −0.42 | −1.16 | ||
| 149.50 | 148.98 | 148.29 | −0.52 | −1.21 | ||
| 149.75 | 149.27 | 148.52 | −0.48 | −1.23 |
| EG | PA | WM | Error (PA) | Error (WM) | RMSE (PA) | RMSE (WM) |
|---|---|---|---|---|---|---|
| 134.05 | 134.12 | 132.30 | 0.07 | −1.75 | 0.10 | 1.97 |
| 134.65 | 134.76 | 132.67 | 0.11 | −1.98 | ||
| 134.70 | 134.83 | 132.73 | 0.13 | −1.97 | ||
| 134.80 | 134.93 | 132.74 | 0.13 | −2.06 | ||
| 134.60 | 134.65 | 132.54 | 0.05 | −2.06 |
| EG | PA | WM | Error (PA) | Error (WM) | RMSE (PA) | RMSE (WM) |
|---|---|---|---|---|---|---|
| 120.00 | 120.19 | 118.69 | 0.19 | −1.31 | 0.18 | 1.40 |
| 119.85 | 120.00 | 118.48 | 0.15 | −1.37 | ||
| 119.95 | 120.07 | 118.58 | 0.12 | −1.37 | ||
| 119.85 | 119.94 | 118.35 | 0.09 | −1.50 | ||
| 119.95 | 120.23 | 118.50 | 0.28 | −1.45 |
| EG | PA | WM | Error (PA) | Error (WM) | RMSE (PA) | RMSE (WM) |
|---|---|---|---|---|---|---|
| 89.20 | 89.27 | 88.89 | 0.07 | −0.31 | 0.03 | 0.29 |
| 89.95 | 89.96 | 89.73 | 0.01 | −0.22 | ||
| 89.90 | 89.88 | 89.62 | −0.02 | −0.28 | ||
| 89.85 | 89.85 | 89.59 | 0.00 | −0.26 | ||
| 89.80 | 89.79 | 89.42 | −0.01 | −0.38 |
| Ref. | Year | Structure | Comparison Parameter (RMSE/ Max. Deviation) |
|---|---|---|---|
| [43] | 2022 | UR3 Robot | RMSE: 1.0029° |
| [44] | 2022 | Two links joined by a magnetic encoder | ADXL345 (RMSE) Analytical (3.61° to 11.67°), EKF (3.09° to 7.95°), UKF (3.03° to 7.92°) ADXL357 (RMSE) Analytical (4.7° to 11.39°), EKF (4.8° to 11.42°), UKF (4.8° to 11.37°) BNO055 (RMSE) Analytical (2.99° to 17.72°), EKF (3.47° to 10.52°), UKF (3.45° to 10.51°) |
| [45] | 2022 | ROMSS | Max. Deviation: 0.87° |
| [46] | 2021 | Artificial joint | Max. Deviation: 0.60° |
| Proposed Algorithm | 3D Rigid body | RMSE: 0.03° to 0.46° Max. Deviation: 0.52° |
| EG | PA | Error (PA) | RMSE (PA) |
|---|---|---|---|
| 89.20 | 88.02 | 1.18 | 0.996 |
| 89.95 | 88.42 | 1.53 | |
| 89.90 | 89.58 | 0.32 | |
| 89.85 | 88.87 | 0.98 | |
| 89.80 | 89.40 | 0.40 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rahman, M.M.; Gan, K.B.; Aziz, N.A.A.; Huong, A.; You, H.W. Upper Limb Joint Angle Estimation Using Wearable IMUs and Personalized Calibration Algorithm. Mathematics 2023, 11, 970. https://doi.org/10.3390/math11040970
Rahman MM, Gan KB, Aziz NAA, Huong A, You HW. Upper Limb Joint Angle Estimation Using Wearable IMUs and Personalized Calibration Algorithm. Mathematics. 2023; 11(4):970. https://doi.org/10.3390/math11040970
Chicago/Turabian StyleRahman, Md. Mahmudur, Kok Beng Gan, Noor Azah Abd Aziz, Audrey Huong, and Huay Woon You. 2023. "Upper Limb Joint Angle Estimation Using Wearable IMUs and Personalized Calibration Algorithm" Mathematics 11, no. 4: 970. https://doi.org/10.3390/math11040970
APA StyleRahman, M. M., Gan, K. B., Aziz, N. A. A., Huong, A., & You, H. W. (2023). Upper Limb Joint Angle Estimation Using Wearable IMUs and Personalized Calibration Algorithm. Mathematics, 11(4), 970. https://doi.org/10.3390/math11040970