

Phase-Space Modeling and Control of Robots in the Screw Theory Framework Using Geometric Algebra

 ,
,  , and
, and
Abstract
1. Introduction
2. Geometric Algebra
3. Mathematical Development
3.1. Screws
Lie Algebra Elements
3.2. Velocity Kinematics
3.3. Co-Screws
3.4. Lagrangian Formulation of Dynamics Using Screw Theory
3.5. Hamilton’s Equations
4. Hamilton Control Using Screw Theory
5. Examples
5.1. Single Degree-of-Freedom Robot
Comparison with Other Techniques
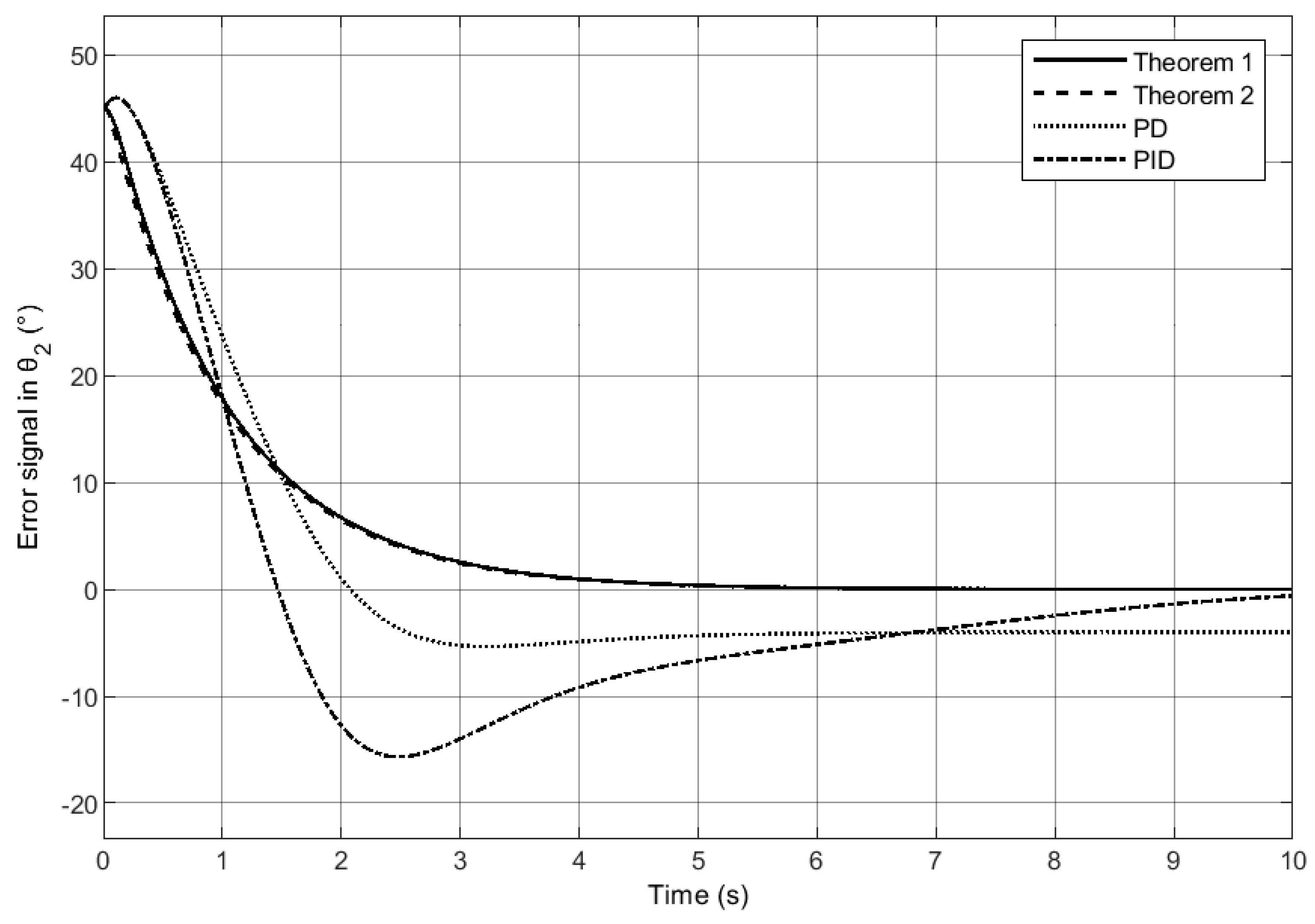
5.2. Two Degrees-of-Freedom Robot
Comparison
6. Conclusions and Future Work
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1. Robot Dynamics Using Screw Theory
Appendix A.2. Hamilton’s Equations Using Screw Theory
References
- Goldstein, H. Classical Mechanics; Addison-Wesley: Boston, MA, USA, 1980. [Google Scholar]
- Taylor, J. Classical Mechanics; G—Reference, Information and Interdisciplinary Subjects Series; University Science Books: Melville, NY, USA, 2005. [Google Scholar]
- Peymani, E.; Fossen, T.I. A Lagrangian framework to incorporate positional and velocity constraints to achieve path-following control. In Proceedings of the 2011 50th IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, 12–15 December 2011; pp. 3940–3945. [Google Scholar] [CrossRef]
- Arimoto, S. Control Theory of Non-Linear Mechanical Systems: A Passivity-Based and Circuit-Theoretic Approach; Oxford Engineering Science Series; Clarendon Press: Oxford, UK, 1996. [Google Scholar]
- Záda, V.; Belda, K. Mathematical modeling of industrial robots based on Hamiltonian mechanics. In Proceedings of the 2016 17th International Carpathian Control Conference (ICCC), High Tatras, Slovakia, 29 May–1 June 2016; pp. 813–818. [Google Scholar] [CrossRef]
- Chi, J.; Yu, H.; Yu, J. Hybrid Tracking Control of 2-DOF SCARA Robot via Port-Controlled Hamiltonian and Backstepping. IEEE Access 2018, 6, 17354–17360. [Google Scholar] [CrossRef]
- Záda, V. Exponentially stable tracking control in terms of Hamiltonian mechanics. In Proceedings of the 2017 18th International Carpathian Control Conference (ICCC), Sinaia, Romania, 28–31 May 2017; pp. 483–487. [Google Scholar] [CrossRef]
- Hestenes, D. Hamiltonian Mechanics with Geometric Calculus. In Proceedings of the Spinors, Twistors, Clifford Algebras and Quantum Deformations; Oziewicz, Z., Jancewicz, B., Borowiec, A., Eds.; Springer: Dordrecht, The Netherlands, 1993; pp. 203–214. [Google Scholar]
- Bayro-Corrochano, E.; Zamora-Esquivel, J. Differential and inverse kinematics of robot devices using conformal geometric algebra. Robotica 2007, 25, 43–61. [Google Scholar] [CrossRef]
- Dahab, E.A.E. A formulation of Hamiltonian mechanics using geometric algebra. Adv. Appl. Clifford Algebr. 2000, 10, 217–223. [Google Scholar] [CrossRef]
- Bayro-Corrochano, E.; Medrano-Hermosillo, J.; Osuna-González, G.; Uriostegui-Legorreta, U. Newton–Euler modeling and Hamiltonians for robot control in the geometric algebra. Robotica 2022, 40, 4031–4055. [Google Scholar] [CrossRef]
- Huang, Z.; Li, Q.; Ding, H. Basics of Screw Theory; Springer: Berlin, Germany, 2013; pp. 1–16. [Google Scholar] [CrossRef]
- Müller, A. Screw Theory–A forgotten Tool in Multibody Dynamics. PAMM 2017, 17, 809–810. [Google Scholar] [CrossRef]
- Ball, R. A Treatise on the Theory of Screws; Cambridge Mathematical Library; Cambridge University Press: Cambridge, UK, 1998. [Google Scholar]
- Toscano, G.S.; Simas, H.; Castelan, E.B.; Martins, D. A new kinetostatic model for humanoid robots using screw theory. Robotica 2018, 36, 570–587. [Google Scholar] [CrossRef]
- Hunt, K.H. Special configurations of robot-arms via screw theory. Robotica 1986, 4, 171–179. [Google Scholar] [CrossRef]
- Selig, J.M. Geometric Fundamentals of Robotics (Monographs in Computer Science); Springer: Berlin/Heidelberg, Germany, 2004. [Google Scholar]
- Lynch, K.; Park, F. Modern Robotics: Mechanics, Planning, and Control; Cambridge Univeristy Press: Cambridge, UK, 2017. [Google Scholar]
- Yi, B.J.; Kim, W.K. Screw-Based Kinematic Modeling and Geometric Analysis of Planar Mobile Robots. In Proceedings of the 2007 International Conference on Mechatronics and Automation, Harbin, China, 5–8 August 2007; pp. 1734–1739. [Google Scholar] [CrossRef]
- Medrano-Hermosillo, J.A.; Lozoya-Ponce, R.; Ramírez-Quintana, J.; Baray-Arana, R. Forward Kinematics Analysis of 6-DoF Articulated Robot using Screw Theory and Geometric Algebra. In Proceedings of the 2022 XXIV Robotics Mexican Congress (COMRob), Mineral de la Reforma/State of Hidalgo, Mexico, 9–11 November 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Zou, Y.; Zhang, A.; Zhang, Q.; Zhang, B.; Wu, X.; Qin, T. Design and Experimental Research of 3-RRS Parallel Ankle Rehabilitation Robot. Micromachines 2022, 13, 950. [Google Scholar] [CrossRef] [PubMed]
- Sun, T.; Lian, B.; Yang, S.; Song, Y. Kinematic Calibration of Serial and Parallel Robots Based on Finite and Instantaneous Screw Theory. IEEE Trans. Robot. 2020, 36, 816–834. [Google Scholar] [CrossRef]
- Liang, Z.; Meng, S.; Changkun, D. Accuracy analysis of SCARA industrial robot based on screw theory. In Proceedings of the 2011 IEEE International Conference on Computer Science and Automation Engineering, Shanghai, China, 10–12 June 2011; Volume 3, pp. 40–46. [Google Scholar] [CrossRef]
- Huang, Y.; Liao, Q.; Wei, S.; Guo, L. Research on Dynamics of a Bicycle Robot with Front-Wheel Drive by Using Kane Equations Based on Screw Theory. In Proceedings of the 2010 International Conference on Artificial Intelligence and Computational Intelligence, Sanya, China, 23–24 October 2010; Volume 1, pp. 546–551. [Google Scholar] [CrossRef]
- Selig, J.M.; McAree, P.R. Constrained robot dynamics I: Serial robots with end-effector constraints. J. Robot. Syst. 1999, 16, 471–486. [Google Scholar] [CrossRef]
- Cheng, J.; Bi, S.; Yuan, C.; Cai, Y.; Yao, Y.; Zhang, L. Dynamic Modeling Method of Multibody System of 6-DOF Robot Based on Screw Theory. Machines 2022, 10, 499. [Google Scholar] [CrossRef]
- Qin, Q.; Gao, G. Screw Dynamic Modeling and Novel Composite Error-Based Second-order Sliding Mode Dynamic Control for a Bilaterally Symmetrical Hybrid Robot. Robotica 2021, 39, 1264–1280. [Google Scholar] [CrossRef]
- Abaunza, H.; Chandra, R.; Özgür, E.; Ramón, J.A.C.; Mezouar, Y. Kinematic screws and dual quaternion based motion controllers. Control Eng. Pract. 2022, 128, 105325. [Google Scholar] [CrossRef]
- Bayro-Corrochano, E. Geometric Algebra Applications Vol. I: Computer Vision, Graphics and Neurocomputing; Springer International Publishing: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Bayro-Corrochano, E. A Survey on Quaternion Algebra and Geometric Algebra Applications in Engineering and Computer Science 1995–2020. IEEE Access 2021, 9, 104326–104355. [Google Scholar] [CrossRef]
- Ji, P.; Li, C.; Ma, F. Sliding Mode Control of Manipulator Based on Improved Reaching Law and Sliding Surface. Mathematics 2022, 10, 1935. [Google Scholar] [CrossRef]
- Hestenes, D.; Sobczyk, G. Clifford Algebra to Geometric Calculus: A Unified Language for Mathematics and Physics; Fundamental Theories of Physics; Springer: Dordrecht, The Netherlands, 1987. [Google Scholar]
- Perwass, C. Geometric Algebra with Applications in Engineering; Springer: Berlin, Germany, 2009; Volume 4. [Google Scholar] [CrossRef]
- Lee, J. Velocity workspace analysis for multiple arm robot systems. Robotica 2001, 19, 581–591. [Google Scholar] [CrossRef]
- Siciliano, B.; Sciavicco, L.; Villani, L.; Oriolo, G. Robotics: Modelling, Planning and Control; Advanced Textbooks in Control and Signal Processing; Springer: London, UK, 2010. [Google Scholar]
- Craig, J. Introduction to Robotics, Global Edition; Pearson Education Limited: London, UK, 2021. [Google Scholar]
- Selig, J.; Ding, X. A screw theory of static beams. In Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems. Expanding the Societal Role of Robotics in the the Next Millennium (Cat. No.01CH37180), Maui, HI, USA, 29 October–3 November 2001; Volume 1, pp. 312–317. [Google Scholar] [CrossRef]
- Utkin, V.I. Sliding Modes in Control and Optimization; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1992. [Google Scholar]
- Khalil, H. Nonlinear Systems; Pearson Education; Prentice Hall: Kent, OH, USA, 2002. [Google Scholar]
- Kelly, R. A tuning procedure for stable PID control of robot manipulators. Robotica 1995, 13, 141–148. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| m | 0.25 | kg |
| l | 0.5 | m |
| g | 9.81 |
| Law of Control | Law of Control | Gains |
|---|---|---|
| Theorem 1 | See Equation (49) | |
| Theorem 2 | See Equation (55) | |
| PD | ||
| PID |
| Parameter | Value | Unit |
|---|---|---|
| 0.25 | kg | |
| 2 | m | |
| g | 9.81 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Medrano-Hermosillo, J.A.; Lozoya-Ponce, R.; Rodriguez-Mata, A.E.; Baray-Arana, R. Phase-Space Modeling and Control of Robots in the Screw Theory Framework Using Geometric Algebra. Mathematics 2023, 11, 572. https://doi.org/10.3390/math11030572
Medrano-Hermosillo JA, Lozoya-Ponce R, Rodriguez-Mata AE, Baray-Arana R. Phase-Space Modeling and Control of Robots in the Screw Theory Framework Using Geometric Algebra. Mathematics. 2023; 11(3):572. https://doi.org/10.3390/math11030572
Chicago/Turabian StyleMedrano-Hermosillo, Jesús Alfonso, Ricardo Lozoya-Ponce, Abraham Efraím Rodriguez-Mata, and Rogelio Baray-Arana. 2023. "Phase-Space Modeling and Control of Robots in the Screw Theory Framework Using Geometric Algebra" Mathematics 11, no. 3: 572. https://doi.org/10.3390/math11030572
APA StyleMedrano-Hermosillo, J. A., Lozoya-Ponce, R., Rodriguez-Mata, A. E., & Baray-Arana, R. (2023). Phase-Space Modeling and Control of Robots in the Screw Theory Framework Using Geometric Algebra. Mathematics, 11(3), 572. https://doi.org/10.3390/math11030572