
Queueing-Inventory Systems with Catastrophes under Various Replenishment Policies



Abstract
:1. Introduction
2. Model Description
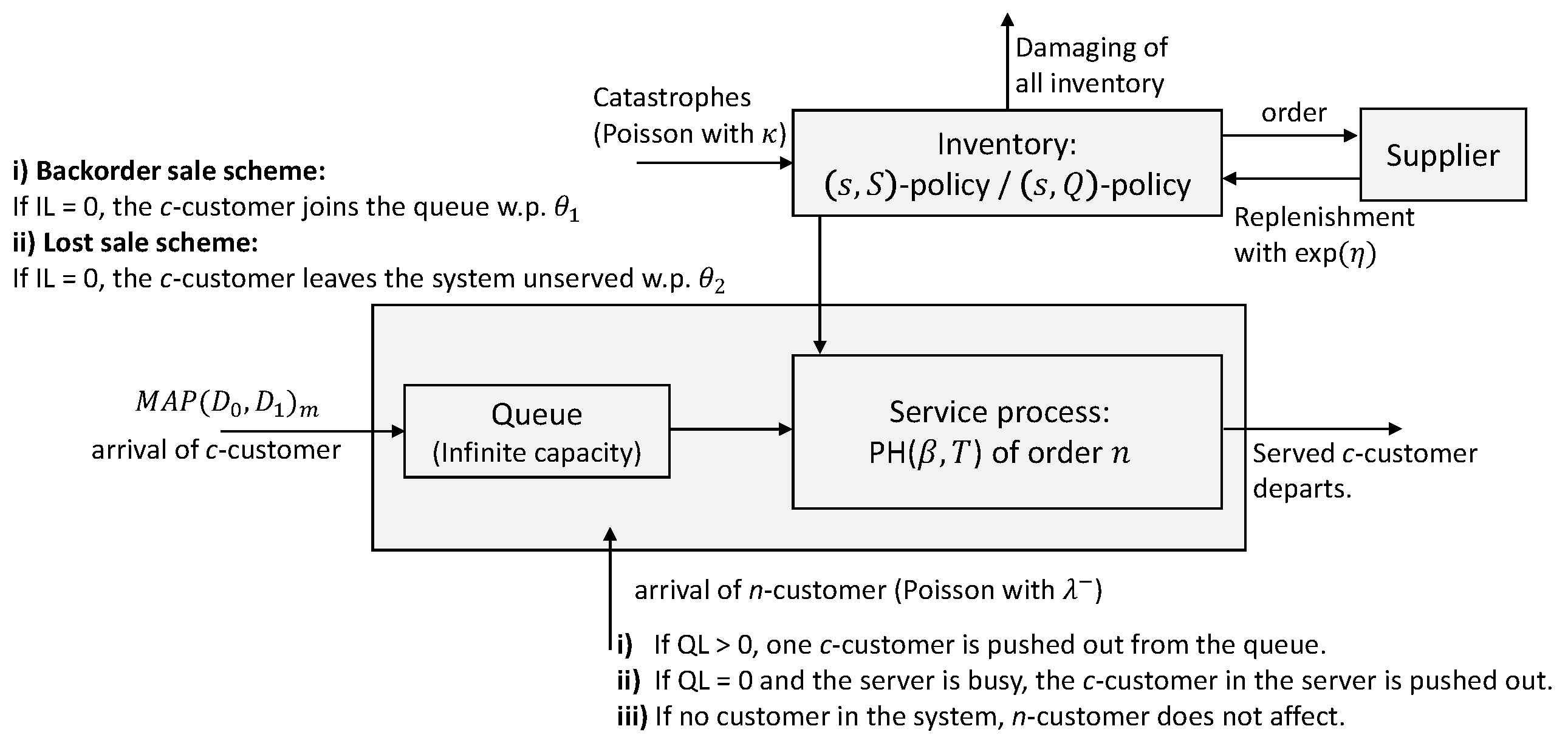
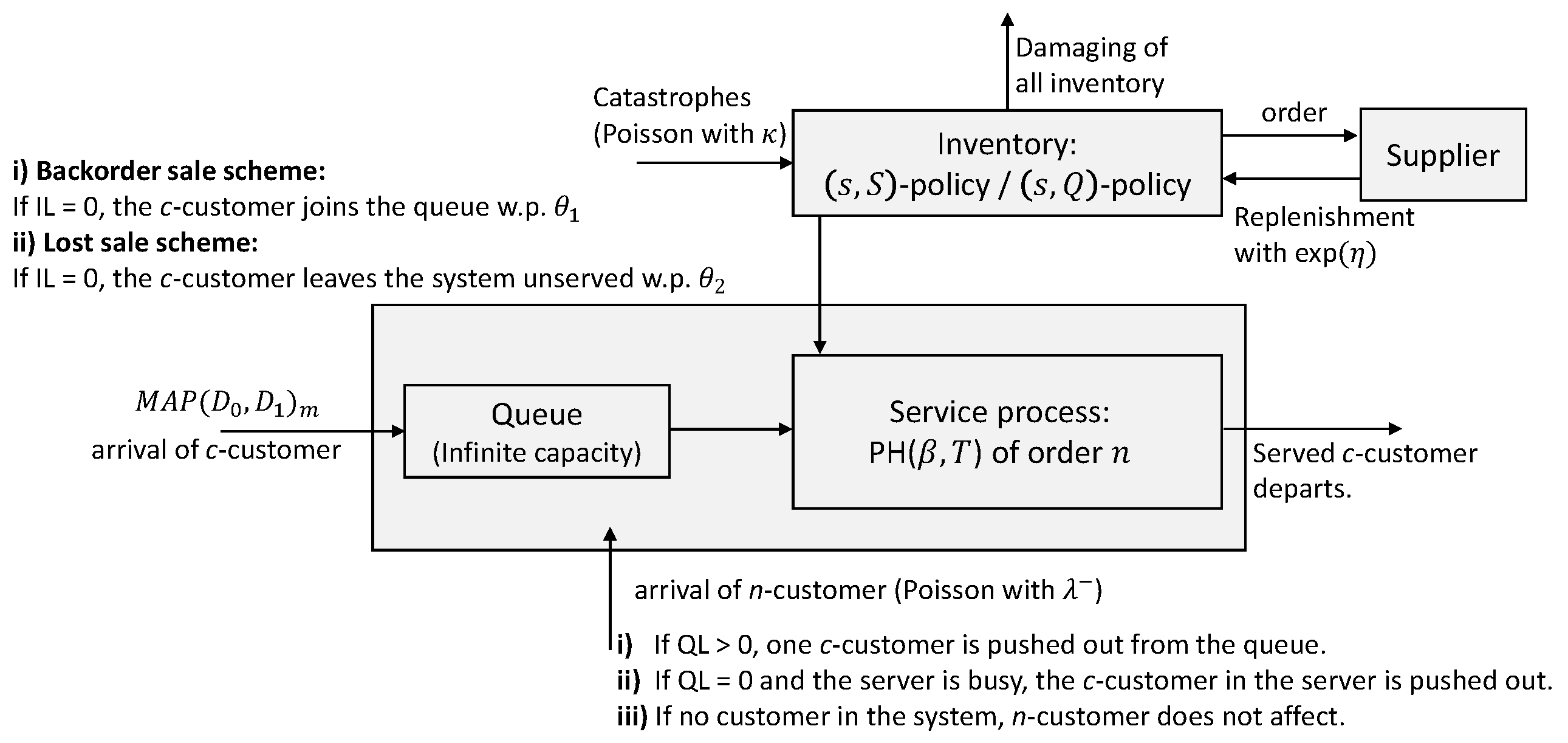
- The c-customers (consumer customers) arrive in the system according to the Markovian arrival process () with representation . The underlying Markov chain of the is governed by the matrix . Such that, the entries of matrix denote the transition rates without arrival while the entries of matrix denote the transition rates with arrival. So, the arrival rate of c-customers is given by where is the stationary probability vector of the generator matrix and it is satisfied
- The service times of the c-customers follow -distribution with representation where is the initial probability vector, , and is a sub-generator matrix. The matrix holds the transition rates among the n transient states and is a column vector containing the absorption rates into state 0 from the transient states. It is clear that . The phase-type distribution has the service rate .
- The system also receives n-customers (negative customers) that the arrivals occur according to the Poisson process with rate . When an n-customer arrives in the system, there are three possible cases; (i) there is at least one c-customer in the queue , and only the c-customer is pushed out from the queue (i.e., the servicing of the c-customer in the server continues), (ii) the queue has no c-customer and the server is busy with a c-customer, then the c-customer in the server is forced out of the system. However, in this case, the inventory level does not change, since stocks are released after the completion of servicing a c-customer is assumed, and (iii) there are no c-customers in the system. The arrived n-customer has no effect on the operation of the system.
- A hybrid sales scheme is used in the system. When a c-customer arrives in the system, if the inventory level is zero , then the c-customer either joins the queue of infinite capacity with probability (called backorder sale scheme), or leaves the system unserved with probability (called lost sale scheme). Note that . If the inventory level occurs to be zero with the completion servicing of a c-customer, the c-customer in the queue (if any) waits for a replenishment.
- In the warehouse part of the system, catastrophic events can occur according to the Poisson process with parameter . When a catastrophic event occurs, all items, even the item that is at the status of release to the c-customer in the inventory are instantly destroyed. If the c-customer’s service is interrupted due to a catastrophe, then he returns to the queue. In other words, the catastrophic event only destroys the items in the inventory and does not cause c-customers out of the system. Hence, if the number of items in the inventory is zero, then the disaster has no effect on the operation of the system.
- Two inventory replenishment policies are considered in this study. That is an -type policy for Model-1 and an -type policy for Model-2. The lead time of order follows an exponential distribution with parameter for both replenishment policies. In an -type policy (sometimes this policy is called “Up to S”), when the inventory level drops to the reorder point s, , an order is placed for replenishment and upon replenishment the inventory level becomes S. This policy states that the replenishment quantity varies in order to fill the maximum capacity of the inventory when the reorder is placed. In an -type policy, when the inventory level drops to the reorder point s, , an order quantity of a is placed for replenishment and upon replenishment the inventory level becomes a sum of the current items in the inventory and order quantity. This policy states that the replenishment quantity is always fixed.
3. The Steady-State Analysis
3.1. Model-1 with -Type Replenishment Policy
3.1.1. Stability Condition
3.1.2. The Steady-State Probability Vector of the Matrix
3.2. Model-2 with -Type Replenishment Policy
3.2.1. Stability Condition
3.2.2. The Steady-State Probability Vector of the Matrix
4. Performance Measures of Model-1 and Model-2
- The probability that there is no c-customer in the system
- The mean number of c-customers in the system
- The mean loss rate of c-customers because of no inventory
- The mean loss rate of c-customers because of n-customer
- The mean loss rate of c-customers
- The mean number of items in the inventory
- The mean reorder rate
- The mean order size
5. Numerical Study
5.1. The Effect of Parameters on Performance Measures
5.2. Optimization
- the fixed cost of one order,
- the unit cost of the order size,
- the holding cost per item in the inventory per unit of time,
- the damaging cost per item in the inventory,
- the cost incured due to the loss of a c-customer,
- the waiting cost of a c-customer in the system.
6. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| QS | Queueing System |
| QIS | Queueing Inventory System |
| ICS | Inventory Control System |
| MAP | Markovian Arrival Process |
| PH | Phase-type distribution |
| IL | Inventory Level |
| QL | Queue Length |
| CTMC | Continuous Time Markov Chain |
| QBD | Quasi-birth-and-death process |
| ETC | Expected Total Cost |
References
- Schwarz, M.; Daduna, H. Queuing Systems with Inventory Management with Random Lead Times and with Backordering. Math. Methods Oper. Res. 2006, 64, 383–414. [Google Scholar] [CrossRef]
- Schwarz, M.; Sauer, C.; Daduna, H.; Kulik, R.; Szekli, R. M/M/1 Queuing Systems with Inventory. Queuing Syst. Theory Appl. 2006, 54, 55–78. [Google Scholar] [CrossRef]
- Melikov, A.; Molchanov, A. Stock Optimization in Transport/Storage Systems. Cybernetics 1992, 28, 484–487. [Google Scholar]
- Sigman, K.; Simchi-Levi, D. Light Traffic Heuristic for an M/G/1 Queue with Limited Inventory. Ann. Oper. Res. 1992, 40, 371–380. [Google Scholar] [CrossRef]
- Krishnamoorthy, A.; Shajin, D.; Narayanan, W. Inventory with Positive Service Time: A Survey, Advanced Trends in Queueing Theory; Series of Books “Mathematics and Statistics” Sciences. V. 2; Anisimov, V., Limnios, N., Eds.; ISTE & Wiley: London, UK, 2021; pp. 201–238. [Google Scholar]
- Krishnamoorthy, A.; Lakshmy, B.; Manikandan, R. A survey on inventory models with positive service time. OPSEARCH 2011, 48, 153–169. [Google Scholar] [CrossRef]
- Karthikeyan, K.; Sudhesh, R. Recent review article on queueing inventory systems. Res. J. Pharm. Tech. 2016, 9, 1451–1461. [Google Scholar] [CrossRef]
- Ko, S.S. A Nonhomogeneous Quasi-Birth Process Approach for an (s,S) Policy for a Perishable Inventory System with Retrial Demands. J. Ind. Manag. Opt. 2020, 16, 1415–1433. [Google Scholar] [CrossRef]
- Aghsami, A.; Samimi, Y.; Aghaei, A. A novel Markovian queuing-inventory model with imperfect production and inspection process: A hospital case study. Comput. Ind. Eng. 2021, 162, 107772. [Google Scholar] [CrossRef]
- Jenifer, J.S.A.; Sangeetha, N.; Sivakumar, B. Optimal Control of Service Parameter for a Perishable Inventory System with Service Facility, Postponed Demands and Finite Waiting Hall. Int. J. Inf. Manag. Sci. 2014, 25, 349–370. [Google Scholar]
- Reshmi, P.S.; Jose, K. A Perishable (s,S) Inventory System with an Infinite Orbit and Retrials. Math. Sci. Int. Res. J. 2022, 7, 121–126. [Google Scholar]
- Melikov, A.; Shahmaliyev, M.; Nair, S.S. Matrix-Geometric Method to Study Queuing System with Perishable Inventory. Autom. Remote Control 2021, 82, 2168–2181. [Google Scholar] [CrossRef]
- Ahmad, B.; Benkherouf, L. On an optimal replenishment policy for inventory models for non-instantaneous deteriorating items with stock dependent demand and particular backlogging. RAIRO Oper. Res. 2020, 54, 69–79. [Google Scholar] [CrossRef]
- Jeganathan, K.; Selvakumar, S.; Saravanan, S.; Anbazhagan, N.; Amutha, S.; Cho, W.; Joshi, G.P.; Ryoo, J. Performance of stochastic inventory system with a fresh item, returned item, refurbished item, and multi-class customers. Mathematics 2022, 10, 1137. [Google Scholar] [CrossRef]
- Anbazhagan, N.; Sivakumar, B.; Amutha, S.; Suganya, S. Two-commodity perishable inventory system with partial backlog demands. Empresa Investig. Pensam. Crit. 2022, 11, 33–48. [Google Scholar] [CrossRef]
- Hanukov, G.; Avinadav, T.; Chernonog, T.; Yechiali, U. A service system with perishable products where customers are either fastidious or strategic. Int. J. Prod. Econ. 2020, 228, 107696. [Google Scholar] [CrossRef]
- Melikov, A.; Aliyeva, S.; Nair, S.; Krishna Kumar, B. Retrial queuing-inventory systems with delayed feedback and instantaneous damaging of items. Axioms 2022, 11, 241. [Google Scholar] [CrossRef]
- Melikov, A.; Mirzayev, R.R.; Nair, S.S. Numerical investigation of double source queuing-inventory systems with destructive customers. J. Comput. Syst. Sci. Int. 2022, 61, 581–598. [Google Scholar] [CrossRef]
- Melikov, A.; Mirzayev, R.R.; Nair, S.S. Double Sources Queuing-Inventory System with Hybrid Replenishment Policy. Mathematics 2022, 10, 2423. [Google Scholar] [CrossRef]
- Melikov, A.; Mirzayev, R.R.; Sztrik, J. Double Sources QIS with finite waiting room and destructible stocks. Mathematics 2023, 11, 226. [Google Scholar] [CrossRef]
- Lian, Z.; Liu, L.; Neuts, F. A Discrete-Time Model for Common Lifetime Inventory Systems. Math. Oper. Res. 2005, 30, 718–732. [Google Scholar] [CrossRef]
- Chakravarthy, S.R. An inventory system with Markovian demands, and phase-type distributions for perishability and replenishment. OPSEARCH 2010, 47, 266–283. [Google Scholar] [CrossRef]
- Krishnamoorthy, A.; Shajin, D.; Lakshmy, B. On a queueing-inventory with reservation, cancellation, common life time and retrial. Ann. Oper. Res. 2016, 247, 365–389. [Google Scholar] [CrossRef]
- Lumb, V.R.; Rani, I. Analytically simple solution to discrete-time queue with catastrophes, balking and state-dependent service. Int. J. Syst. Assur. Eng. Manag. 2022, 13, 783–817. [Google Scholar] [CrossRef]
- Shajin, D.; Krishnamoorthy, A.; Manikandan, R. On a Queueing-Inventory System with Common Life Time and Markovian Lead Time Process. Oper. Res. 2022, 22, 651–684. [Google Scholar] [CrossRef]
- Ayyappan, G.; Thilagavathy, K. Analysis of MAP/PH/1 queueing system with catastrophic delay action, standby server, balking, working vacation and vacation interruption under N-policy. Int. J. Math. Model. Numer. Optim. 2023, 13, 223–243. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, J.; Zhang, G. The effect of information on the strategic behavior in a Markovian queue with catastrophes and working vacations. Qual. Technol. Quant. Manag. 2023, 1–34. [Google Scholar] [CrossRef]
- Demircioglu, M.; Bruneel, H.; Wittevrongel, S. Analysis of a Discrete-Time Queueing Model with Disasters. Mathematics 2021, 9, 3283. [Google Scholar] [CrossRef]
- Kumar, N.; Gupta, U.C. Analysis of BMAP/MSP/1 queue with MAP generated negative customers and disasters. Commun. Stat. Theory Methods 2023, 52, 4283–4309. [Google Scholar] [CrossRef]
- Seenivasan, M.; Kameswari, M.; Chakravarthy, V.J.; Indumathi, M. Analysis of queueing model with catastrophe and restoration. AIP Conf. Proc. 2021, 2364, 020034. [Google Scholar] [CrossRef]
- Ye, J.; Liu, L.; Jiang, T. Analysis of a Single-Sever Queue with Disasters and Repairs under Bernoulli Vacation Schedule. J. Syst. Sci. Inf. 2016, 4, 547–559. [Google Scholar] [CrossRef]
- Chakravarthy, S.R. A catastrophic queueing model with delayed action. Appl. Math. Model. 2017, 46, 631–649. [Google Scholar] [CrossRef]
- Chakravarthy, S.R.; Dudin, A.N.; Klimenok, V.I. A retrial queueing model with MAP arrivals, catastrophic failures with repairs, and customer impatience. Asia Pac. J. Oper. Res. 2010, 27, 727–752. [Google Scholar] [CrossRef]
- Raj, R.; Jain, V. Resource and traffic control optimization in MMAP[c]/PH[c]/S queueing system with PH retrial times and catastrophe phenomenon. Telecommun. Syst. 2023, 84, 341–362. [Google Scholar] [CrossRef]
- Sivakumar, B.; Arivarignan, G. A Perishable Inventory System with Service Facilities and Negative Customers. Adv. Model. Optim. 2005, 7, 193–210. [Google Scholar]
- Soujanya, M.L.; Laxmi, P.V. Analysis on Dual Supply Inventory Model Having Negative Arrivals and Finite Lifetime Inventory. Reliab. Theory Appl. 2021, 16, 295–301. [Google Scholar]
- Melikov, A.; Poladova, L.; Edayapurath, S.; Sztrik, J. Single-server queuing-inventory systems with negative customers and catastrophes in the warehouse. Mathematics 2023, 11, 2380. [Google Scholar] [CrossRef]
- Neuts, M.F. Matrix-Geometric Solutions in Stochastic Models: An Algorithmic Approach; The Johns Hopkins University Press: Baltimore, MD, USA, 1981. [Google Scholar]
- Chakravarthy, S.R. Introduction to Matrix-Analytic Methods in Queues 1-Analytical and Simulation Approach- Basics; John Wiley & Sons, Inc.: London, UK, 2022. [Google Scholar]
- Chakravarthy, S.R. Introduction to Matrix-Analytic Methods in Queues 2-Analytical and Simulation Approach- Queues and Simulation; John Wiley & Sons, Inc.: London, UK, 2022. [Google Scholar]
- Dudin, A.N.; Klimenok, V.I.; Vishnevsky, V.M. The Theory of Queueing Systems with Correlated Flows; Springer Nature Switzerland AG: Basel, Switzerland, 2020. [Google Scholar]
- He, Q.-M. Fundamentals of Matrix-Analytic Methods; Springer: New York, NY, USA, 2014. [Google Scholar]
- Latouche, G.; Ramaswami, V. Introduction to Matrix Analytic Methods in Stochastic Modeling; SIAM: Philadelphia, PA, USA, 1999. [Google Scholar]
- Chakravarthy, S.R.; Shajin, D.; Krishnamoorthy, A. Infinite server queuing-inventory models. J. Indian Soc. Probab. Stat. 2020, 21, 43–68. [Google Scholar] [CrossRef]
- Chakravarthy, S.R. Markovian arrival processes. In Wiley Encyclopedia of Operations Research and Management Science; John Wiley & Sons, Inc.: London, UK, 2010. [Google Scholar] [CrossRef]

{kind=link}
| As It Is Varied | It Is Fixed |
|---|---|
| the arrival rate of c-customers: | , , , , |
| the arrival rate of n-customers: | , , , , |
| the service rate of c-customers: | , , , , |
| the rate of the catastrophic events: | , , , , |
| the probability that c-customer joins the queue when the inventory level is zero: | , , , , |
| ERLA | HEXA | ||||||
|---|---|---|---|---|---|---|---|
| Values of the Parameters | ERLS | EXPS | HEXS | ERLS | EXPS | HEXS | |
| 4.2 | 3.239 | 3.490 | 5.611 | 7.730 | 8.133 | 10.894 | |
| 4.4 | 3.848 | 4.179 | 6.994 | 9.530 | 10.046 | 13.654 | |
| 4.6 | 4.663 | 5.106 | 8.925 | 11.967 | 12.646 | 17.501 | |
| 4.8 | 5.811 | 6.426 | 11.789 | 15.438 | 16.373 | 23.198 | |
| 5 | 7.559 | 8.458 | 16.444 | 20.759 | 22.140 | 32.449 | |
| 0.4 | 3.401 | 3.707 | 6.344 | 9.298 | 9.772 | 13.120 | |
| 0.6 | 4.384 | 4.808 | 8.496 | 11.889 | 12.534 | 17.199 | |
| 0.8 | 5.686 | 6.291 | 11.589 | 15.463 | 16.380 | 23.117 | |
| 1 | 7.559 | 8.458 | 16.444 | 20.759 | 22.140 | 32.449 | |
| 1.2 | 10.577 | 12.023 | 25.194 | 29.468 | 31.767 | 49.303 | |
| 7.6 | 9.620 | 10.940 | 22.927 | 27.554 | 29.633 | 45.447 | |
| 8 | 7.559 | 8.458 | 16.444 | 20.759 | 22.140 | 32.449 | |
| 8.4 | 6.323 | 6.989 | 12.837 | 16.701 | 17.717 | 25.201 | |
| 8.8 | 5.499 | 6.018 | 10.549 | 14.009 | 14.802 | 20.592 | |
| 9.2 | 4.909 | 5.329 | 8.975 | 12.095 | 12.741 | 17.411 | |
| 1 | 7.559 | 8.458 | 16.444 | 20.759 | 22.140 | 32.449 | |
| 1.4 | 4.317 | 4.701 | 7.931 | 11.502 | 12.095 | 16.254 | |
| 1.8 | 2.957 | 3.159 | 4.778 | 7.644 | 7.979 | 10.175 | |
| 2.2 | 2.216 | 2.331 | 3.200 | 5.555 | 5.767 | 7.059 | |
| 2.6 | 1.753 | 1.822 | 2.296 | 4.262 | 4.405 | 5.205 | |
| ERLA | HEXA | ||||||
|---|---|---|---|---|---|---|---|
| Values of the Parameters | ERLS | EXPS | HEXS | ERLS | EXPS | HEXS | |
| 4.2 | 3.701 | 4.001 | 6.579 | 9.563 | 10.081 | 13.596 | |
| 4.4 | 4.560 | 4.976 | 8.584 | 12.213 | 12.924 | 17.831 | |
| 4.6 | 5.811 | 6.412 | 11.701 | 16.100 | 17.133 | 24.402 | |
| 4.8 | 7.803 | 8.737 | 17.165 | 22.329 | 23.979 | 35.903 | |
| 5 | 11.486 | 13.156 | 29.116 | 33.888 | 37.021 | 61.022 | |
| 0.4 | 4.462 | 4.861 | 8.427 | 13.026 | 13.702 | 18.572 | |
| 0.6 | 5.900 | 6.499 | 11.895 | 17.145 | 18.173 | 25.651 | |
| 0.8 | 7.997 | 8.947 | 17.641 | 23.348 | 25.032 | 37.437 | |
| 1 | 11.486 | 13.156 | 29.116 | 33.888 | 37.021 | 61.022 | |
| 1.2 | 18.705 | 22.381 | 63.549 | 55.978 | 63.556 | 131.820 | |
| 7.6 | 16.591 | 19.688 | 52.949 | 50.813 | 57.091 | 111.116 | |
| 8 | 11.486 | 13.156 | 29.116 | 33.888 | 37.021 | 61.022 | |
| 8.4 | 8.971 | 10.066 | 20.110 | 25.573 | 27.542 | 42.060 | |
| 8.8 | 7.472 | 8.265 | 15.396 | 20.636 | 22.028 | 32.114 | |
| 9.2 | 6.477 | 7.086 | 12.507 | 17.370 | 18.426 | 26.003 | |
| 1 | 11.486 | 13.156 | 29.116 | 33.888 | 37.021 | 61.022 | |
| 1.4 | 5.187 | 5.675 | 9.862 | 14.842 | 15.683 | 21.456 | |
| 1.8 | 3.270 | 3.498 | 5.346 | 9.048 | 9.451 | 12.058 | |
| 2.2 | 2.354 | 2.476 | 3.412 | 6.281 | 6.516 | 7.939 | |
| 2.6 | 1.822 | 1.892 | 2.386 | 4.682 | 4.833 | 5.677 | |
| ERLA | HEXA | MPCA | |||||
|---|---|---|---|---|---|---|---|
| Values of the Parameters | ERLS | HEXS | ERLS | HEXS | ERLS | HEXS | |
| 4 | 3.266 | 3.324 | 3.345 | 3.408 | 3.334 | 3.397 | |
| 4.2 | 3.209 | 3.275 | 3.280 | 3.350 | 3.268 | 3.338 | |
| 4.4 | 3.154 | 3.228 | 3.217 | 3.294 | 3.204 | 3.281 | |
| 4.6 | 3.099 | 3.182 | 3.154 | 3.238 | 3.141 | 3.226 | |
| 4.8 | 3.046 | 3.138 | 3.092 | 3.184 | 3.080 | 3.172 | |
| 0.2 | 4.000 | 4.088 | 4.140 | 4.227 | 4.054 | 4.147 | |
| 0.4 | 3.696 | 3.797 | 3.807 | 3.907 | 3.747 | 3.851 | |
| 0.6 | 3.431 | 3.537 | 3.513 | 3.616 | 3.475 | 3.582 | |
| 0.8 | 3.199 | 3.303 | 3.255 | 3.358 | 3.234 | 3.339 | |
| 1 | 2.994 | 3.094 | 3.030 | 3.130 | 3.020 | 3.120 | |
| 0.1 | 3.655 | 3.665 | 3.774 | 3.795 | 3.767 | 3.796 | |
| 0.3 | 3.500 | 3.526 | 3.606 | 3.643 | 3.598 | 3.639 | |
| 0.5 | 3.343 | 3.390 | 3.432 | 3.487 | 3.422 | 3.478 | |
| 0.7 | 3.191 | 3.259 | 3.256 | 3.328 | 3.245 | 3.316 | |
| 0.9 | 3.039 | 3.127 | 3.077 | 3.165 | 3.068 | 3.155 | |
| 1 | 2.994 | 3.094 | 3.030 | 3.130 | 3.020 | 3.120 | |
| 1.4 | 3.108 | 3.184 | 3.159 | 3.242 | 3.150 | 3.231 | |
| 1.8 | 3.212 | 3.260 | 3.270 | 3.336 | 3.266 | 3.328 | |
| 2.2 | 3.306 | 3.325 | 3.368 | 3.416 | 3.368 | 3.412 | |
| 2.6 | 3.391 | 3.380 | 3.453 | 3.483 | 3.459 | 3.486 | |
| ERLA | HEXA | MPCA | |||||
|---|---|---|---|---|---|---|---|
| Values of the Parameters | ERLS | HEXS | ERLS | HEXS | ERLS | HEXS | |
| 4 | 2.266 | 2.289 | 2.275 | 2.303 | 2.250 | 2.277 | |
| 4.2 | 2.214 | 2.240 | 2.221 | 2.252 | 2.200 | 2.231 | |
| 4.4 | 2.162 | 2.192 | 2.167 | 2.201 | 2.150 | 2.184 | |
| 4.6 | 2.109 | 2.143 | 2.113 | 2.150 | 2.101 | 2.138 | |
| 4.8 | 2.057 | 2.095 | 2.060 | 2.100 | 2.051 | 2.091 | |
| 0.2 | 2.949 | 2.984 | 2.976 | 3.015 | 2.960 | 3.000 | |
| 0.4 | 2.634 | 2.671 | 2.648 | 2.689 | 2.633 | 2.675 | |
| 0.6 | 2.382 | 2.421 | 2.390 | 2.432 | 2.377 | 2.420 | |
| 0.8 | 2.176 | 2.217 | 2.180 | 2.223 | 2.171 | 2.215 | |
| 1 | 2.005 | 2.047 | 2.007 | 2.050 | 2.001 | 2.045 | |
| 0.1 | 2.559 | 2.563 | 2.624 | 2.635 | 2.581 | 2.594 | |
| 0.3 | 2.456 | 2.467 | 2.496 | 2.515 | 2.454 | 2.473 | |
| 0.5 | 2.335 | 2.354 | 2.351 | 2.377 | 2.320 | 2.345 | |
| 0.7 | 2.193 | 2.219 | 2.195 | 2.225 | 2.177 | 2.207 | |
| 0.9 | 2.030 | 2.059 | 2.027 | 2.059 | 2.020 | 2.053 | |
| 1 | 2.005 | 2.047 | 2.007 | 2.050 | 2.001 | 2.045 | |
| 1.4 | 2.121 | 2.152 | 2.124 | 2.161 | 2.112 | 2.148 | |
| 1.8 | 2.218 | 2.236 | 2.222 | 2.252 | 2.205 | 2.233 | |
| 2.2 | 2.301 | 2.303 | 2.306 | 2.327 | 2.285 | 2.303 | |
| 2.6 | 2.371 | 2.355 | 2.378 | 2.389 | 2.353 | 2.362 | |
| ERLA | HEXA | MPCA | |||||
|---|---|---|---|---|---|---|---|
| Values of the Parameters | ERLS | HEXS | ERLS | HEXS | ERLS | HEXS | |
| 4 | 0.635 | 0.637 | 0.640 | 0.639 | 0.628 | 0.626 | |
| 4.2 | 0.645 | 0.646 | 0.648 | 0.647 | 0.637 | 0.635 | |
| 4.4 | 0.655 | 0.655 | 0.656 | 0.654 | 0.647 | 0.644 | |
| 4.6 | 0.664 | 0.663 | 0.665 | 0.662 | 0.657 | 0.653 | |
| 4.8 | 0.673 | 0.671 | 0.673 | 0.669 | 0.666 | 0.662 | |
| 0.2 | 0.504 | 0.497 | 0.493 | 0.486 | 0.492 | 0.485 | |
| 0.4 | 0.564 | 0.557 | 0.556 | 0.549 | 0.552 | 0.545 | |
| 0.6 | 0.612 | 0.606 | 0.607 | 0.600 | 0.601 | 0.594 | |
| 0.8 | 0.650 | 0.645 | 0.648 | 0.642 | 0.642 | 0.636 | |
| 1 | 0.682 | 0.678 | 0.681 | 0.677 | 0.676 | 0.671 | |
| 0.1 | 0.582 | 0.584 | 0.589 | 0.590 | 0.577 | 0.576 | |
| 0.3 | 0.599 | 0.602 | 0.608 | 0.608 | 0.595 | 0.593 | |
| 0.5 | 0.622 | 0.625 | 0.629 | 0.628 | 0.616 | 0.614 | |
| 0.7 | 0.648 | 0.649 | 0.651 | 0.649 | 0.640 | 0.638 | |
| 0.9 | 0.674 | 0.672 | 0.674 | 0.672 | 0.668 | 0.665 | |
| 1 | 0.682 | 0.678 | 0.681 | 0.677 | 0.676 | 0.671 | |
| 1.4 | 0.663 | 0.663 | 0.664 | 0.661 | 0.656 | 0.652 | |
| 1.8 | 0.646 | 0.648 | 0.649 | 0.648 | 0.639 | 0.637 | |
| 2.2 | 0.630 | 0.636 | 0.637 | 0.637 | 0.626 | 0.624 | |
| 2.6 | 0.617 | 0.624 | 0.625 | 0.628 | 0.614 | 0.613 | |
| ERLA | HEXA | MPCA | |||||
|---|---|---|---|---|---|---|---|
| Values of the Parameters | ERLS | HEXS | ERLS | HEXS | ERLS | HEXS | |
| 4 | 0.764 | 0.754 | 0.751 | 0.739 | 0.741 | 0.729 | |
| 4.2 | 0.774 | 0.762 | 0.762 | 0.749 | 0.754 | 0.740 | |
| 4.4 | 0.784 | 0.770 | 0.773 | 0.758 | 0.767 | 0.751 | |
| 0.2 | 0.615 | 0.606 | 0.604 | 0.594 | 0.605 | 0.595 | |
| 0.4 | 0.683 | 0.670 | 0.672 | 0.659 | 0.672 | 0.659 | |
| 0.6 | 0.735 | 0.719 | 0.726 | 0.709 | 0.725 | 0.708 | |
| 0.8 | 0.777 | 0.758 | 0.769 | 0.750 | 0.768 | 0.748 | |
| 1 | 0.811 | 0.789 | 0.805 | 0.783 | 0.803 | 0.782 | |
| 0.1 | 0.686 | 0.686 | 0.675 | 0.672 | 0.658 | 0.652 | |
| 0.3 | 0.716 | 0.713 | 0.705 | 0.699 | 0.689 | 0.680 | |
| 0.5 | 0.748 | 0.741 | 0.735 | 0.726 | 0.723 | 0.712 | |
| 4.6 | 0.793 | 0.777 | 0.784 | 0.766 | 0.779 | 0.762 | |
| 4.8 | 0.802 | 0.783 | 0.794 | 0.775 | 0.791 | 0.772 | |
| 0.7 | 0.778 | 0.765 | 0.768 | 0.753 | 0.760 | 0.745 | |
| 0.9 | 0.806 | 0.787 | 0.801 | 0.782 | 0.798 | 0.779 | |
| 1 | 0.811 | 0.789 | 0.805 | 0.783 | 0.803 | 0.782 | |
| 1.4 | 0.791 | 0.776 | 0.782 | 0.765 | 0.777 | 0.760 | |
| 1.8 | 0.773 | 0.764 | 0.762 | 0.749 | 0.754 | 0.740 | |
| 2.2 | 0.755 | 0.753 | 0.745 | 0.735 | 0.733 | 0.723 | |
| 2.6 | 0.738 | 0.742 | 0.730 | 0.724 | 0.716 | 0.709 | |
| ERLA | HEXA | MPCA | |||||
|---|---|---|---|---|---|---|---|
| Values of the Parameters | ERLS | HEXS | ERLS | HEXS | ERLS | HEXS | |
| 4 | 5.891 | 5.928 | 5.953 | 5.983 | 5.896 | 5.927 | |
| 4.2 | 5.960 | 5.998 | 6.012 | 6.043 | 5.960 | 5.993 | |
| 4.4 | 6.028 | 6.066 | 6.071 | 6.103 | 6.025 | 6.058 | |
| 4.6 | 6.095 | 6.133 | 6.130 | 6.163 | 6.090 | 6.125 | |
| 4.8 | 6.161 | 6.200 | 6.188 | 6.222 | 6.155 | 6.191 | |
| 0.2 | 4.852 | 4.828 | 4.797 | 4.772 | 4.795 | 4.767 | |
| 0.4 | 5.267 | 5.257 | 5.247 | 5.234 | 5.222 | 5.210 | |
| 0.6 | 5.629 | 5.636 | 5.632 | 5.635 | 5.599 | 5.604 | |
| 0.8 | 5.947 | 5.970 | 5.962 | 5.982 | 5.930 | 5.952 | |
| 1 | 6.227 | 6.265 | 6.247 | 6.281 | 6.220 | 6.257 | |
| 0.1 | 5.545 | 5.567 | 5.607 | 5.625 | 5.547 | 5.562 | |
| 0.3 | 5.654 | 5.682 | 5.732 | 5.754 | 5.671 | 5.691 | |
| 0.5 | 5.806 | 5.840 | 5.876 | 5.903 | 5.816 | 5.843 | |
| 0.7 | 5.980 | 6.020 | 6.032 | 6.066 | 5.982 | 6.017 | |
| 0.9 | 6.167 | 6.215 | 6.199 | 6.241 | 6.166 | 6.212 | |
| 1 | 6.227 | 6.265 | 6.247 | 6.281 | 6.220 | 6.257 | |
| 1.4 | 6.087 | 6.127 | 6.125 | 6.158 | 6.085 | 6.118 | |
| 1.8 | 5.966 | 6.010 | 6.021 | 6.055 | 5.973 | 6.005 | |
| 2.2 | 5.861 | 5.912 | 5.931 | 5.969 | 5.880 | 5.912 | |
| 2.6 | 5.770 | 5.831 | 5.853 | 5.896 | 5.802 | 5.835 | |
| ERLA | HEXA | MPCA | |||||
|---|---|---|---|---|---|---|---|
| Values of the Parameters | ERLS | HEXS | ERLS | HEXS | ERLS | HEXS | |
| 4 | 4.605 | 4.611 | 4.613 | 4.614 | 4.573 | 4.574 | |
| 4.2 | 4.666 | 4.669 | 4.671 | 4.670 | 4.637 | 4.637 | |
| 4.4 | 4.725 | 4.726 | 4.728 | 4.724 | 4.700 | 4.698 | |
| 4.6 | 4.784 | 4.781 | 4.784 | 4.778 | 4.763 | 4.759 | |
| 4.8 | 4.841 | 4.835 | 4.840 | 4.832 | 4.825 | 4.818 | |
| 0.2 | 4.036 | 4.006 | 3.993 | 3.959 | 3.994 | 3.959 | |
| 0.4 | 4.319 | 4.293 | 4.294 | 4.265 | 4.288 | 4.259 | |
| 0.6 | 4.548 | 4.527 | 4.535 | 4.511 | 4.524 | 4.501 | |
| 0.8 | 4.738 | 4.722 | 4.732 | 4.714 | 4.720 | 4.704 | |
| 1 | 4.897 | 4.888 | 4.896 | 4.885 | 4.886 | 4.876 | |
| 0.1 | 4.236 | 4.248 | 4.241 | 4.247 | 4.181 | 4.182 | |
| 0.3 | 4.365 | 4.375 | 4.379 | 4.382 | 4.322 | 4.323 | |
| 0.5 | 4.521 | 4.529 | 4.532 | 4.534 | 4.485 | 4.486 | |
| 0.7 | 4.691 | 4.696 | 4.698 | 4.698 | 4.665 | 4.668 | |
| 0.9 | 4.872 | 4.875 | 4.875 | 4.876 | 4.861 | 4.865 | |
| 1 | 4.897 | 4.888 | 4.896 | 4.885 | 4.886 | 4.876 | |
| 1.4 | 4.771 | 4.770 | 4.773 | 4.766 | 4.750 | 4.745 | |
| 1.8 | 4.659 | 4.671 | 4.668 | 4.668 | 4.634 | 4.634 | |
| 2.2 | 4.562 | 4.589 | 4.579 | 4.586 | 4.536 | 4.542 | |
| 2.6 | 4.476 | 4.519 | 4.501 | 4.518 | 4.452 | 4.464 | |
| ERLA | HEXA | MPCA | |||||
|---|---|---|---|---|---|---|---|
| Values of the Parameters | ERLS | HEXS | ERLS | HEXS | ERLS | HEXS | |
| 4 | 0.837 | 0.848 | 0.869 | 0.884 | 0.861 | 0.879 | |
| 4.2 | 0.886 | 0.899 | 0.918 | 0.935 | 0.909 | 0.929 | |
| 4.4 | 0.936 | 0.952 | 0.967 | 0.987 | 0.958 | 0.979 | |
| 4.6 | 0.988 | 1.007 | 1.016 | 1.039 | 1.007 | 1.031 | |
| 4.8 | 1.040 | 1.063 | 1.066 | 1.091 | 1.058 | 1.084 | |
| 0.2 | 0.642 | 0.664 | 0.723 | 0.750 | 0.677 | 0.712 | |
| 0.4 | 0.788 | 0.811 | 0.849 | 0.876 | 0.818 | 0.851 | |
| 0.6 | 0.908 | 0.933 | 0.953 | 0.981 | 0.933 | 0.964 | |
| 0.8 | 1.009 | 1.035 | 1.041 | 1.069 | 1.029 | 1.058 | |
| 1 | 1.094 | 1.120 | 1.117 | 1.144 | 1.109 | 1.137 | |
| 0.1 | 1.832 | 1.833 | 1.918 | 1.939 | 1.883 | 1.930 | |
| 0.3 | 1.435 | 1.442 | 1.499 | 1.518 | 1.478 | 1.507 | |
| 0.5 | 1.037 | 1.048 | 1.081 | 1.097 | 1.069 | 1.090 | |
| 0.7 | 0.635 | 0.645 | 0.656 | 0.669 | 0.651 | 0.665 | |
| 0.9 | 0.217 | 0.222 | 0.222 | 0.227 | 0.221 | 0.226 | |
| 1 | 1.094 | 1.120 | 1.117 | 1.144 | 1.109 | 1.137 | |
| 1.4 | 1.073 | 1.092 | 1.104 | 1.128 | 1.095 | 1.119 | |
| 1.8 | 1.057 | 1.071 | 1.093 | 1.115 | 1.083 | 1.106 | |
| 2.2 | 1.045 | 1.056 | 1.083 | 1.103 | 1.074 | 1.095 | |
| 2.6 | 1.036 | 1.045 | 1.075 | 1.094 | 1.067 | 1.086 | |
| ERLA | HEXA | MPCA | |||||
|---|---|---|---|---|---|---|---|
| Values of the Parameters | ERLS | HEXS | ERLS | HEXS | ERLS | HEXS | |
| 4 | 0.882 | 0.899 | 0.926 | 0.948 | 0.907 | 0.935 | |
| 4.2 | 0.937 | 0.958 | 0.979 | 1.005 | 0.960 | 0.990 | |
| 4.4 | 0.995 | 1.019 | 1.033 | 1.061 | 1.015 | 1.047 | |
| 4.6 | 1.054 | 1.082 | 1.087 | 1.118 | 1.071 | 1.105 | |
| 4.8 | 1.114 | 1.147 | 1.142 | 1.176 | 1.128 | 1.165 | |
| 0.2 | 0.768 | 0.801 | 0.857 | 0.896 | 0.804 | 0.852 | |
| 0.4 | 0.903 | 0.938 | 0.968 | 1.007 | 0.931 | 0.977 | |
| 0.6 | 1.012 | 1.048 | 1.059 | 1.097 | 1.033 | 1.076 | |
| 0.8 | 1.102 | 1.139 | 1.134 | 1.171 | 1.117 | 1.158 | |
| 1 | 1.177 | 1.214 | 1.197 | 1.234 | 1.187 | 1.226 | |
| 0.1 | 1.873 | 1.873 | 2.032 | 2.065 | 1.953 | 2.064 | |
| 0.3 | 1.481 | 1.492 | 1.589 | 1.619 | 1.538 | 1.592 | |
| 0.5 | 1.084 | 1.101 | 1.149 | 1.174 | 1.120 | 1.155 | |
| 0.7 | 0.673 | 0.690 | 0.700 | 0.719 | 0.689 | 0.711 | |
| 0.9 | 0.234 | 0.242 | 0.238 | 0.246 | 0.237 | 0.245 | |
| 1 | 1.177 | 1.214 | 1.197 | 1.234 | 1.187 | 1.226 | |
| 1.4 | 1.142 | 1.171 | 1.180 | 1.213 | 1.162 | 1.198 | |
| 1.8 | 1.116 | 1.138 | 1.164 | 1.196 | 1.143 | 1.176 | |
| 2.2 | 1.095 | 1.113 | 1.150 | 1.180 | 1.127 | 1.159 | |
| 2.6 | 1.079 | 1.094 | 1.137 | 1.167 | 1.115 | 1.145 | |
| ERLA | HEXA | MPCA | |||||
|---|---|---|---|---|---|---|---|
| Values of the Parameters | ERLS | HEXS | ERLS | HEXS | ERLS | HEXS | |
| 4 | 0.759 | 0.752 | 0.724 | 0.727 | 0.745 | 0.745 | |
| 4.2 | 0.787 | 0.782 | 0.756 | 0.761 | 0.776 | 0.777 | |
| 4.4 | 0.815 | 0.813 | 0.788 | 0.794 | 0.806 | 0.809 | |
| 4.6 | 0.843 | 0.843 | 0.819 | 0.827 | 0.836 | 0.840 | |
| 4.8 | 0.871 | 0.873 | 0.851 | 0.860 | 0.865 | 0.871 | |
| 0.2 | 0.743 | 0.736 | 0.747 | 0.748 | 0.756 | 0.755 | |
| 0.4 | 0.790 | 0.787 | 0.783 | 0.788 | 0.796 | 0.798 | |
| 0.6 | 0.830 | 0.830 | 0.818 | 0.825 | 0.831 | 0.835 | |
| 0.8 | 0.866 | 0.869 | 0.851 | 0.860 | 0.864 | 0.870 | |
| 1 | 0.898 | 0.903 | 0.882 | 0.893 | 0.894 | 0.902 | |
| 0.1 | 0.438 | 0.417 | 0.446 | 0.434 | 0.459 | 0.446 | |
| 0.3 | 0.601 | 0.583 | 0.572 | 0.567 | 0.586 | 0.578 | |
| 0.5 | 0.713 | 0.702 | 0.675 | 0.676 | 0.696 | 0.693 | |
| 0.7 | 0.802 | 0.799 | 0.771 | 0.778 | 0.791 | 0.795 | |
| 0.9 | 0.882 | 0.889 | 0.864 | 0.878 | 0.878 | 0.889 | |
| 1 | 0.898 | 0.903 | 0.882 | 0.893 | 0.894 | 0.902 | |
| 1.4 | 1.173 | 1.166 | 1.142 | 1.148 | 1.161 | 1.163 | |
| 1.8 | 1.410 | 1.384 | 1.363 | 1.359 | 1.387 | 1.379 | |
| 2.2 | 1.615 | 1.562 | 1.554 | 1.536 | 1.579 | 1.559 | |
| 2.6 | 1.790 | 1.707 | 1.720 | 1.685 | 1.744 | 1.710 | |
| ERLA | HEXA | MPCA | |||||
|---|---|---|---|---|---|---|---|
| Values of the Parameters | ERLS | HEXS | ERLS | HEXS | ERLS | HEXS | |
| 4 | 0.778 | 0.776 | 0.755 | 0.762 | 0.772 | 0.777 | |
| 4.2 | 0.809 | 0.810 | 0.788 | 0.798 | 0.805 | 0.812 | |
| 4.4 | 0.840 | 0.844 | 0.822 | 0.834 | 0.836 | 0.845 | |
| 4.6 | 0.870 | 0.877 | 0.856 | 0.870 | 0.868 | 0.879 | |
| 4.8 | 0.900 | 0.910 | 0.889 | 0.905 | 0.899 | 0.912 | |
| 0.2 | 0.783 | 0.783 | 0.794 | 0.800 | 0.800 | 0.805 | |
| 0.4 | 0.828 | 0.832 | 0.829 | 0.839 | 0.837 | 0.846 | |
| 0.6 | 0.867 | 0.874 | 0.862 | 0.875 | 0.871 | 0.882 | |
| 0.8 | 0.901 | 0.911 | 0.893 | 0.909 | 0.901 | 0.915 | |
| 1 | 0.930 | 0.944 | 0.923 | 0.940 | 0.929 | 0.945 | |
| 0.1 | 0.435 | 0.415 | 0.452 | 0.439 | 0.469 | 0.459 | |
| 0.3 | 0.604 | 0.589 | 0.587 | 0.583 | 0.602 | 0.597 | |
| 0.5 | 0.726 | 0.719 | 0.700 | 0.704 | 0.719 | 0.720 | |
| 0.7 | 0.828 | 0.831 | 0.808 | 0.821 | 0.824 | 0.833 | |
| 0.9 | 0.924 | 0.942 | 0.915 | 0.938 | 0.923 | 0.943 | |
| 1 | 0.930 | 0.944 | 0.923 | 0.940 | 0.929 | 0.945 | |
| 1.4 | 1.206 | 1.208 | 1.187 | 1.200 | 1.201 | 1.212 | |
| 1.8 | 1.441 | 1.424 | 1.410 | 1.414 | 1.430 | 1.431 | |
| 2.2 | 1.642 | 1.597 | 1.600 | 1.590 | 1.624 | 1.612 | |
| 2.6 | 1.813 | 1.738 | 1.764 | 1.738 | 1.789 | 1.764 | |
| MAP | PH | ||||||
|---|---|---|---|---|---|---|---|
| ERLA | ERLS | 12 | 1522.323 | 12 | 1525.292 | 12 | 1537.011 |
| EXPS | 12 | 1577.132 | 12 | 1579.566 | 12 | 1590.679 | |
| HEXS | 14 | 2028.332 | 14 | 2028.057 | 14 | 2033.688 | |
| EXPA | ERLS | 13 | 1656.619 | 13 | 1656.629 | 13 | 1664.424 |
| EXPS | 13 | 1714.634 | 13 | 1714.218 | 13 | 1721.526 | |
| HEXS | 15 | 2171.108 | 15 | 2169.237 | 15 | 2172.631 | |
| HEXA | ERLS | 18 | 2414.265 | 17 | 2403.514 | 16 | 2398.433 |
| EXPS | 18 | 2497.895 | 17 | 2487.835 | 17 | 2482.838 | |
| HEXS | 20 | 3045.628 | 19 | 3036.796 | 19 | 3032.003 | |
| MNCA | ERLS | 13 | 1705.272 | 13 | 1705.334 | 13 | 1713.199 |
| EXPS | 13 | 1760.042 | 13 | 1759.702 | 13 | 1767.099 | |
| HEXS | 15 | 2210.253 | 15 | 2208.484 | 15 | 2211.984 | |
| MPCA | ERLS | 39 | 28,273.244 | 38 | 28,245.179 | 36 | 28,217.734 |
| EXPS | 40 | 28,343.299 | 39 | 28,316.826 | 37 | 28,290.719 | |
| HEXS | 45 | 28,862.644 | 43 | 28,840.331 | 42 | 28,818.321 | |
| MAP | PH | ||||||
|---|---|---|---|---|---|---|---|
| ERLA | ERLS | 15 | 1522.217 | 17 | 1528.293 | 19 | 1546.239 |
| EXPS | 15 | 1576.974 | 17 | 1582.440 | 19 | 1599.634 | |
| HEXS | 17 | 2027.992 | 19 | 2029.560 | 21 | 2039.175 | |
| EXPA | ERLS | 16 | 1656.341 | 18 | 1658.732 | 20 | 1671.566 |
| EXPS | 16 | 1714.313 | 18 | 1716.220 | 20 | 1728.459 | |
| HEXS | 18 | 2170.712 | 20 | 2170.295 | 22 | 2176.910 | |
| HEXA | ERLS | 21 | 2413.769 | 22 | 2403.575 | 23 | 2400.146 |
| EXPS | 21 | 2497.376 | 22 | 2487.828 | 24 | 2484.688 | |
| HEXS | 23 | 3045.173 | 24 | 3036.695 | 25 | 3032.973 | |
| MNCA | ERLS | 16 | 1705.006 | 18 | 1707.478 | 20 | 1720.441 |
| EXPS | 16 | 1759.736 | 18 | 1761.756 | 20 | 1774.156 | |
| HEXS | 18 | 2209.873 | 20 | 2209.594 | 22 | 2216.393 | |
| MPCA | ERLS | 42 | 28,273.102 | 43 | 28,244.961 | 43 | 28,217.343 |
| EXPS | 43 | 28,343.165 | 44 | 28,316.619 | 44 | 28,290.345 | |
| HEXS | 48 | 28,862.522 | 48 | 28,840.099 | 49 | 28,817.971 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ozkar, S.; Melikov, A.; Sztrik, J. Queueing-Inventory Systems with Catastrophes under Various Replenishment Policies. Mathematics 2023, 11, 4854. https://doi.org/10.3390/math11234854
Ozkar S, Melikov A, Sztrik J. Queueing-Inventory Systems with Catastrophes under Various Replenishment Policies. Mathematics. 2023; 11(23):4854. https://doi.org/10.3390/math11234854
Chicago/Turabian StyleOzkar, Serife, Agassi Melikov, and Janos Sztrik. 2023. "Queueing-Inventory Systems with Catastrophes under Various Replenishment Policies" Mathematics 11, no. 23: 4854. https://doi.org/10.3390/math11234854
APA StyleOzkar, S., Melikov, A., & Sztrik, J. (2023). Queueing-Inventory Systems with Catastrophes under Various Replenishment Policies. Mathematics, 11(23), 4854. https://doi.org/10.3390/math11234854