
Stochastic Models and Processing Probabilistic Data for Solving the Problem of Improving the Electric Freight Transport Reliability

 ,
,  , , , and
, , , and
Abstract
:1. Introduction
2. Materials and Methods
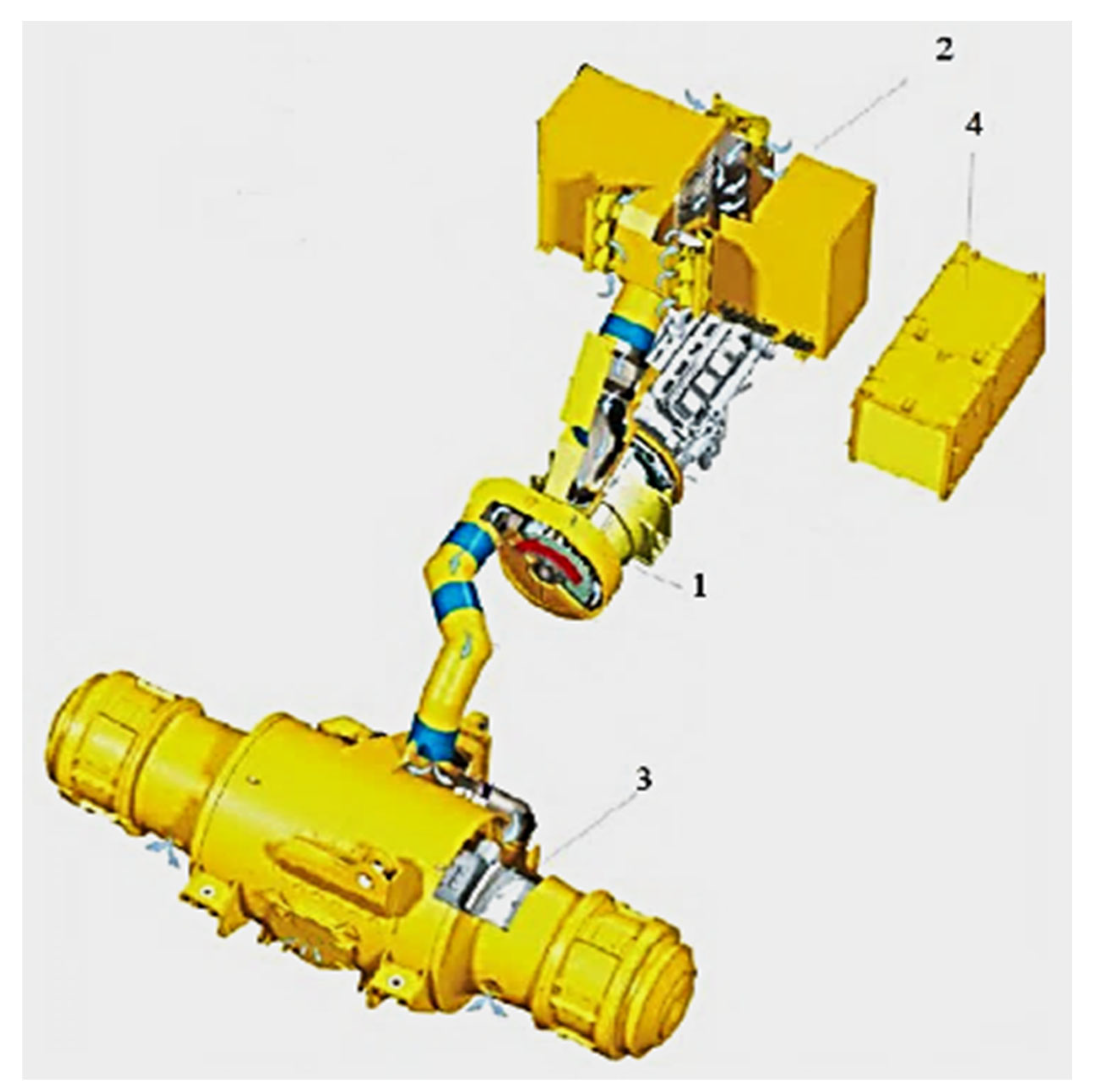
- A traction synchronous alternator driven by an engine. The traction generator stator winding consists of two electrically unconnected three-phase windings, each connected in a star. There is also a single-phase auxiliary self-excitation winding on the traction generator stator connected through an external regulator and contact rings to the excitation winding located on its rotor.
- Two DC traction electric motor wheel motors with series excitation, forced blower ventilation, and built-in speed and thermal monitoring sensors.
- Two power three-phase bridge uncontrolled rectifiers the input terminals of which are connected to the traction generator stator three-phase windings.
- A module of ventilated braking resistors with individual braking resistors for each traction motor and a common motor fan.
- The excitation current regulator of the traction generator, whose power part is a semi-controlled single-phase bridge rectifier, which is connected to the input terminals of the traction generator’s self-excitation winding. Its excitation winding is connected to the output terminals.
- A common regulator of excitation current of traction motors (a smooth field-weakening regulator of electric motors). The power part of the regulator is a controlled three-phase zero-phase rectifier connected in parallel with the circuit containing an anode group of one of the power rectifiers and two series-connected excitation windings of traction motors.
- Power switching equipment consisting of contactors that switch the power circuits and excitation circuits and reverse the traction motors.
- −
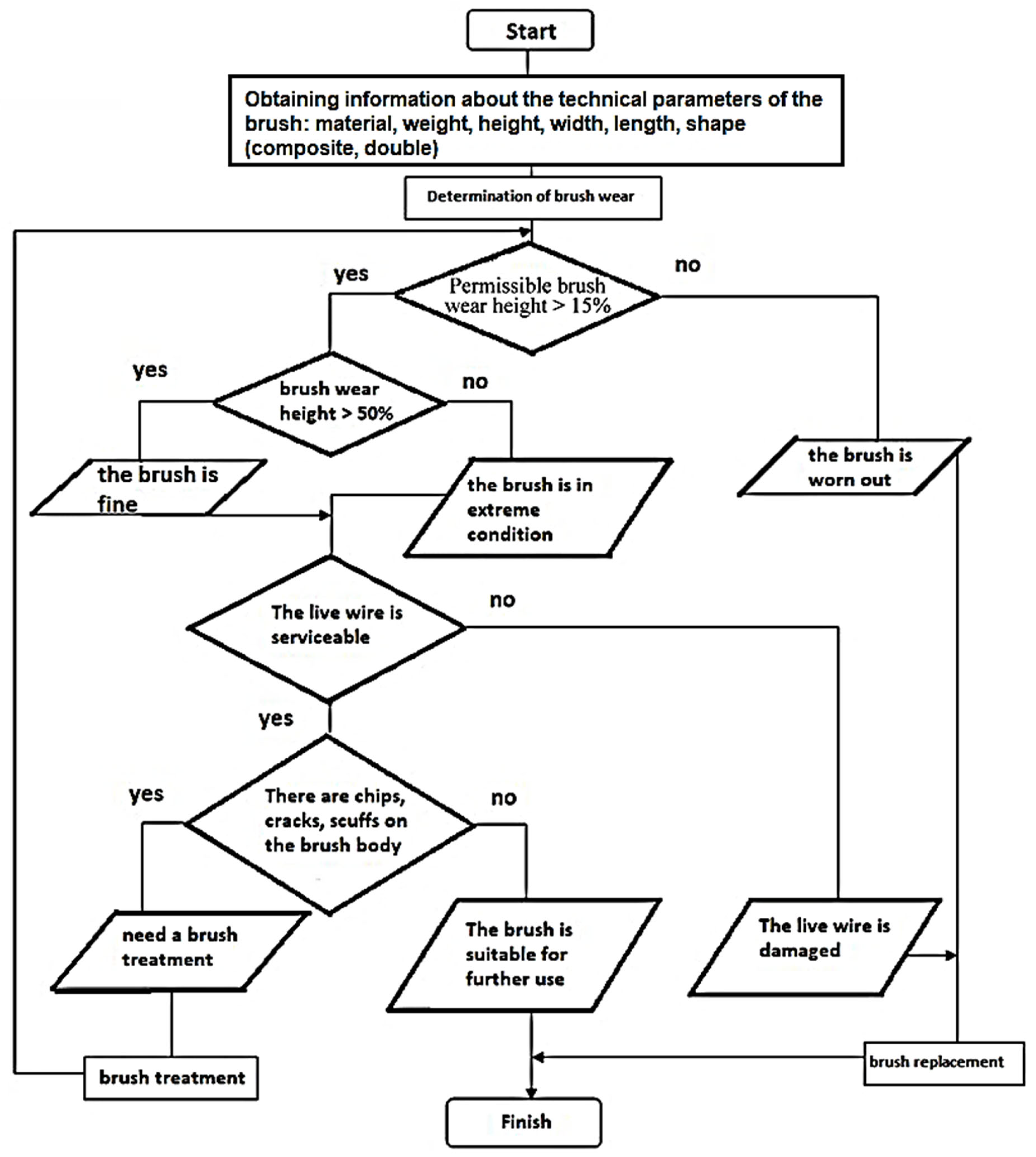
- The BCA technical condition parameters are known on the basis of the survey;
- −
- The defining parameters of the technical condition, changing according to the revealed brush wear rate, are known;
- −
- The criteria of the brush limiting state are known, reaching the limiting values of which is possible when the revealed defects develop.
- where P(t) is the reliability function during time t;
- n(t) is the permissible number of brush failures that does not lead to the motor stopping (determined by tests) during time t;
- N is the number of tests conducted on the electric motor brushes.
- where t is the operating time of the brush;
- τ is the operating time of the brush before failure (random value).
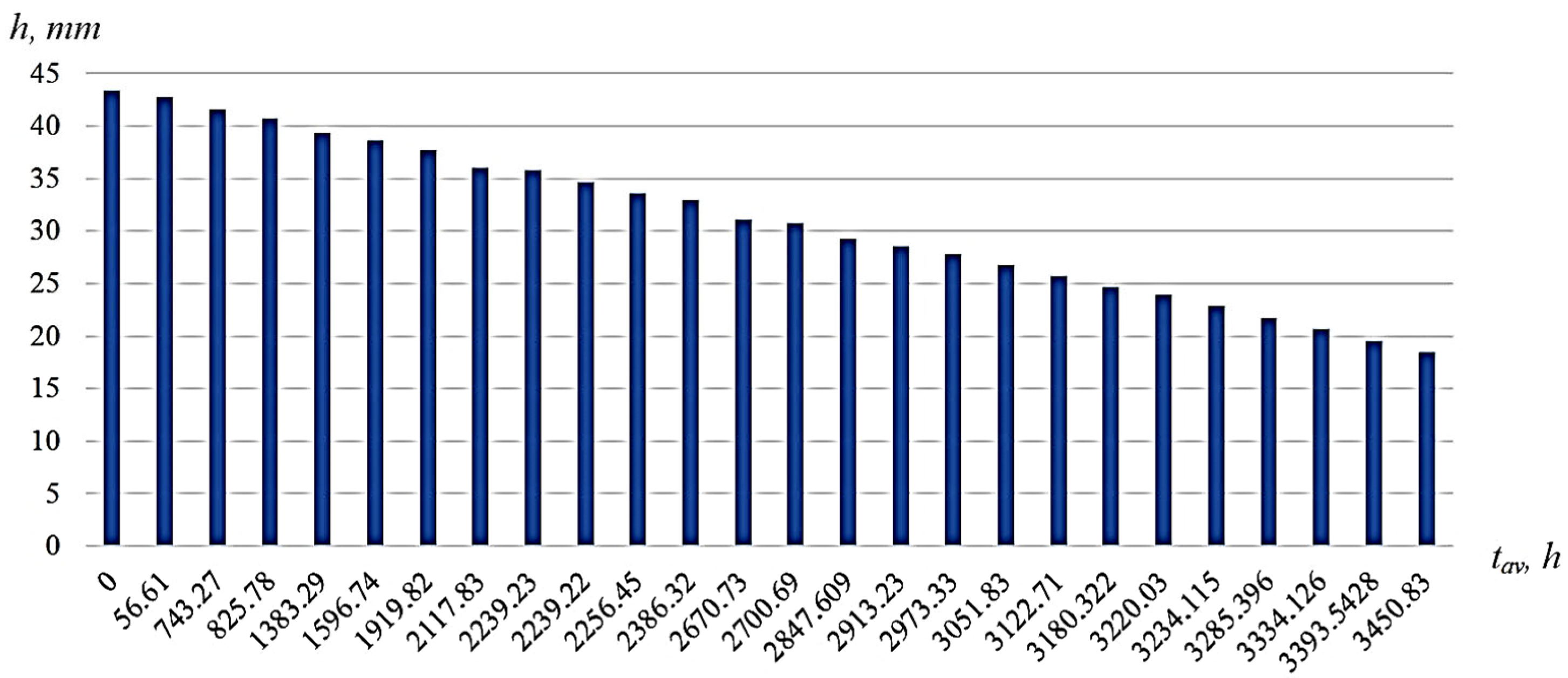
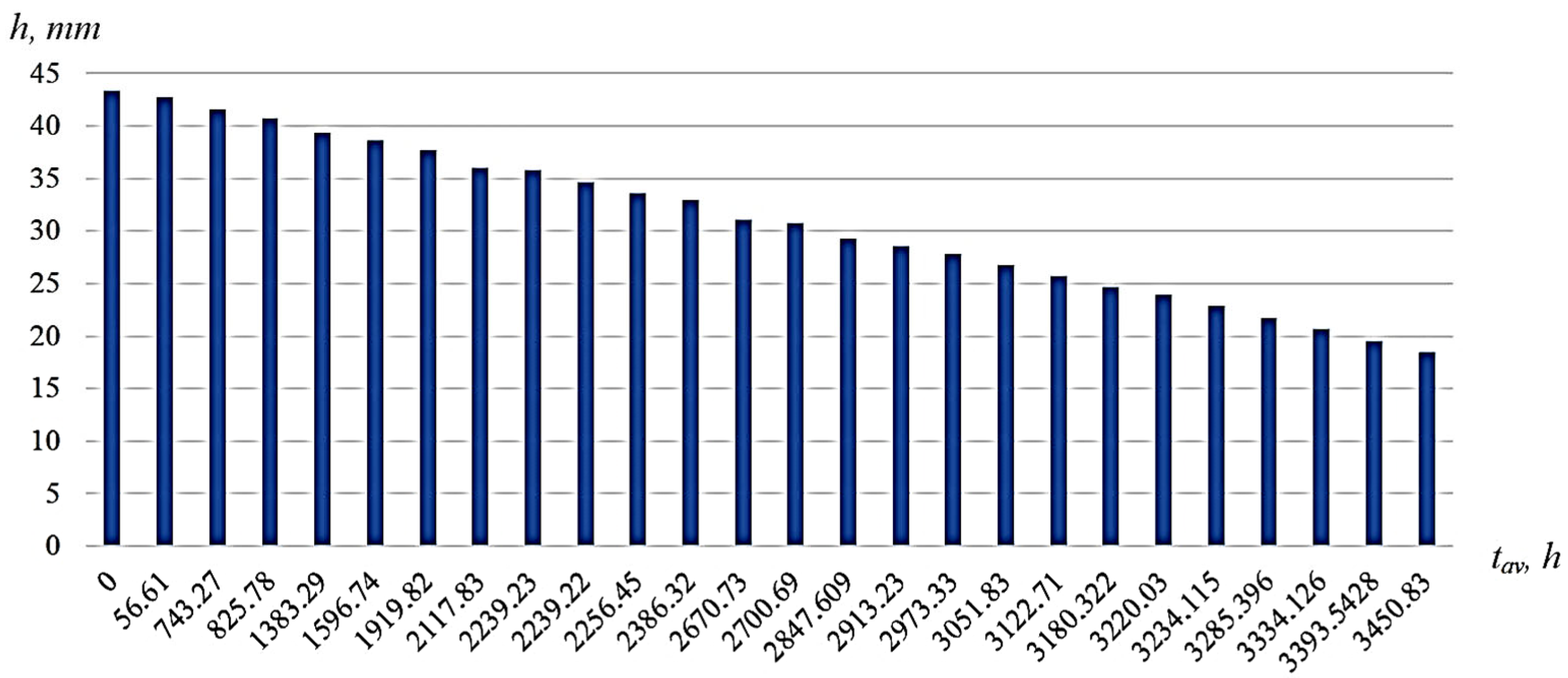
- where tf is the average time of the brush failure;
- V is the wear rate of the brush.
3. Results
- where P(t) is the uptime probability function;
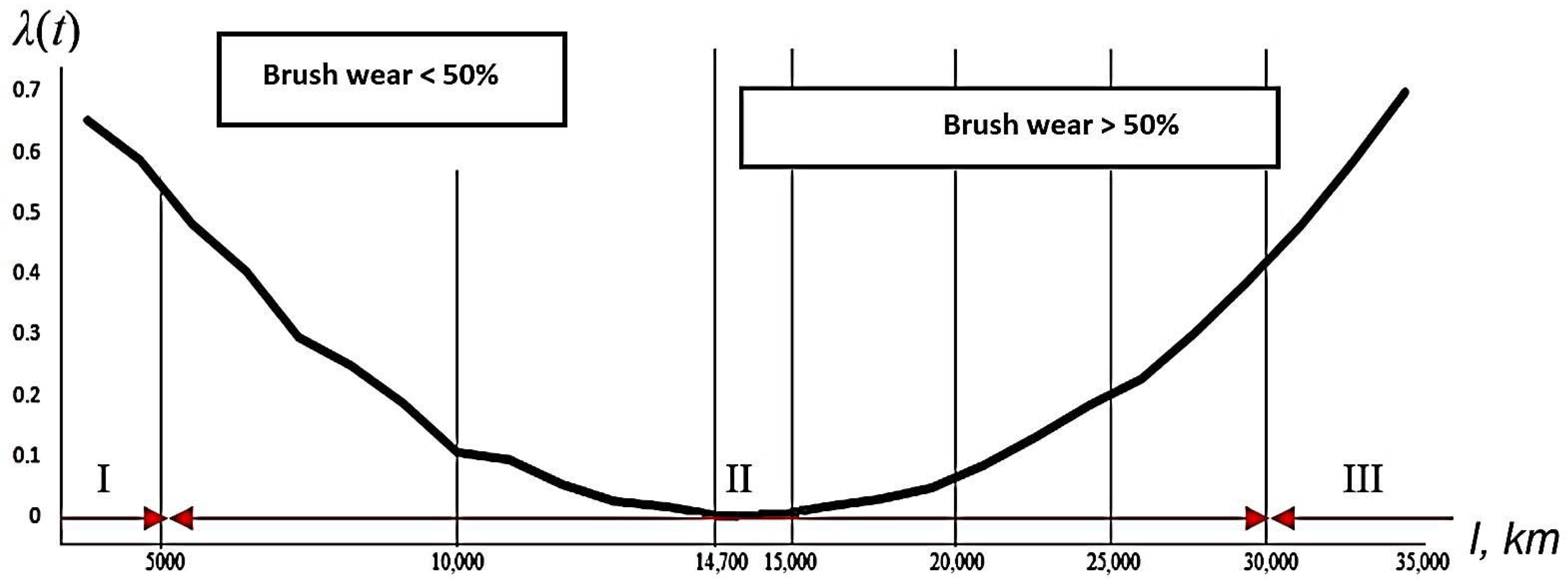
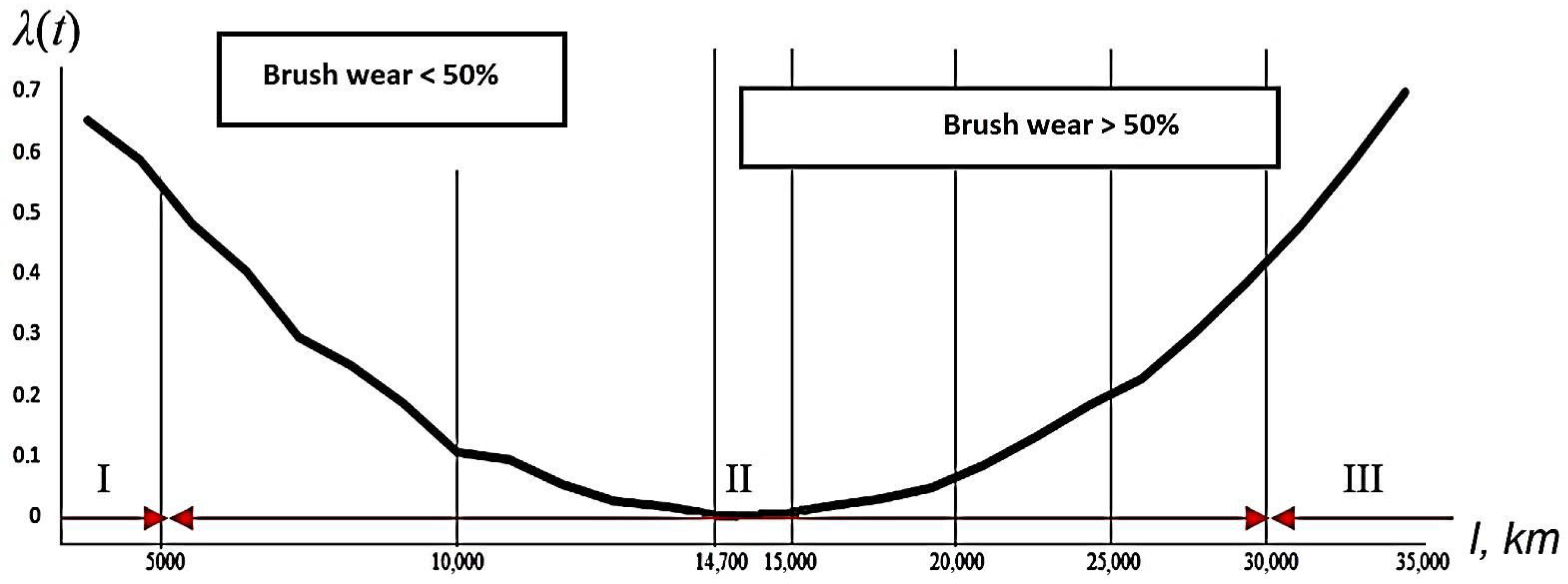
- ν(t) is the failure rate of the entire brush-collector assembly (brushes, collector, brush holder, pressure plate, and cockerels) in the case of time t;
- t is the time when n failures will occur;
- n is the number of brush failures;
- λi (t) is the failure rate of the i-brush on only one brush holder;
- N is the number of brushes involved in the experiment.
- where λb is the basic failure rate of the brush when tested under nominal electrical load and normal temperature conditions;
- λbf is a brush failure rate according to the results of the persistence tests conducted on the packages of the manufacturing plants;
- Kas is a coefficient of actual stiffness, taking into account the stiffness degree of the brush application conditions;
- Kacc is an acceptance coefficient, reflecting the quality level of brush manufacture;
- Kmode is a mode coefficient, which takes into account the change in the basic failure rate depending on the electrical load and ambient temperature.
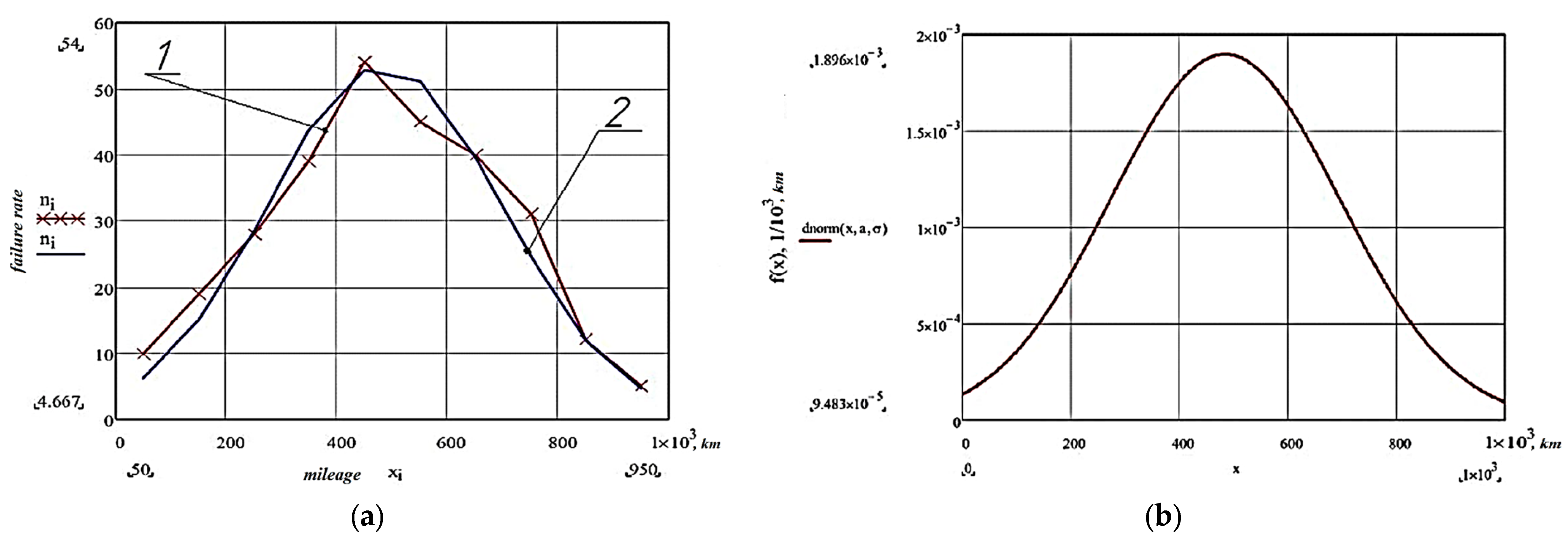
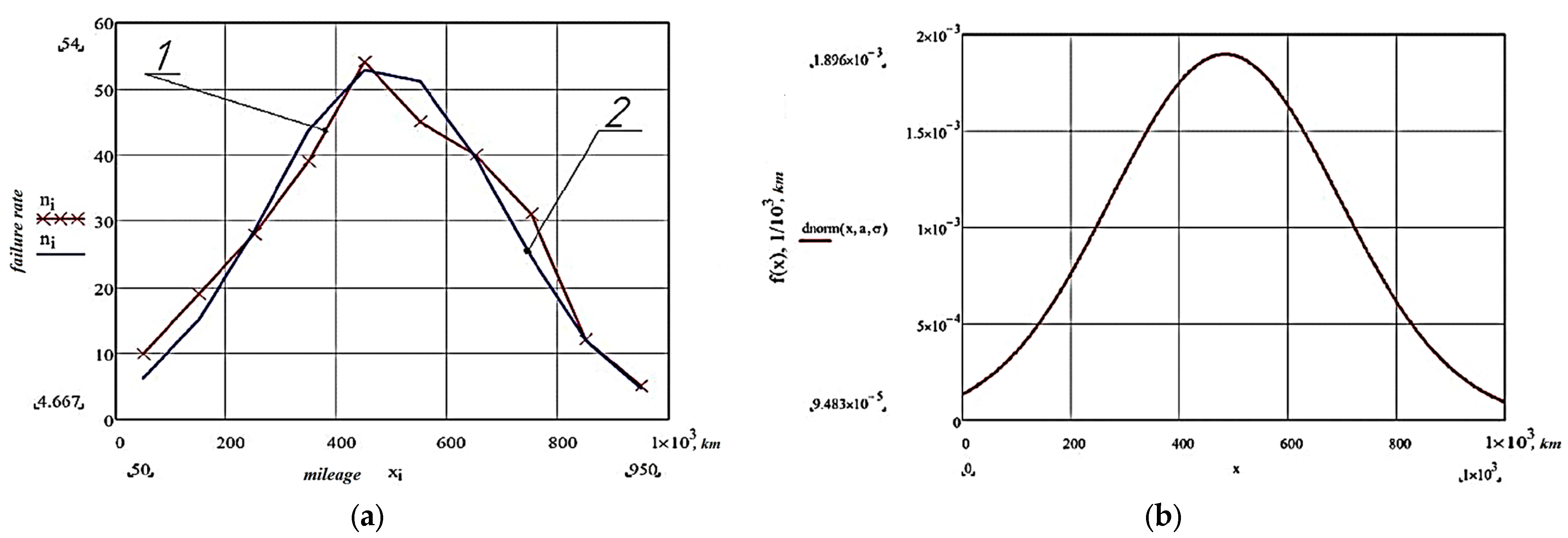
- where is the BCA recovery function;
- is the time interval before the occurrence of failures in the control panel;
- is the time between failures;
- σ is the standard deviation.
4. Discussion
5. Conclusions
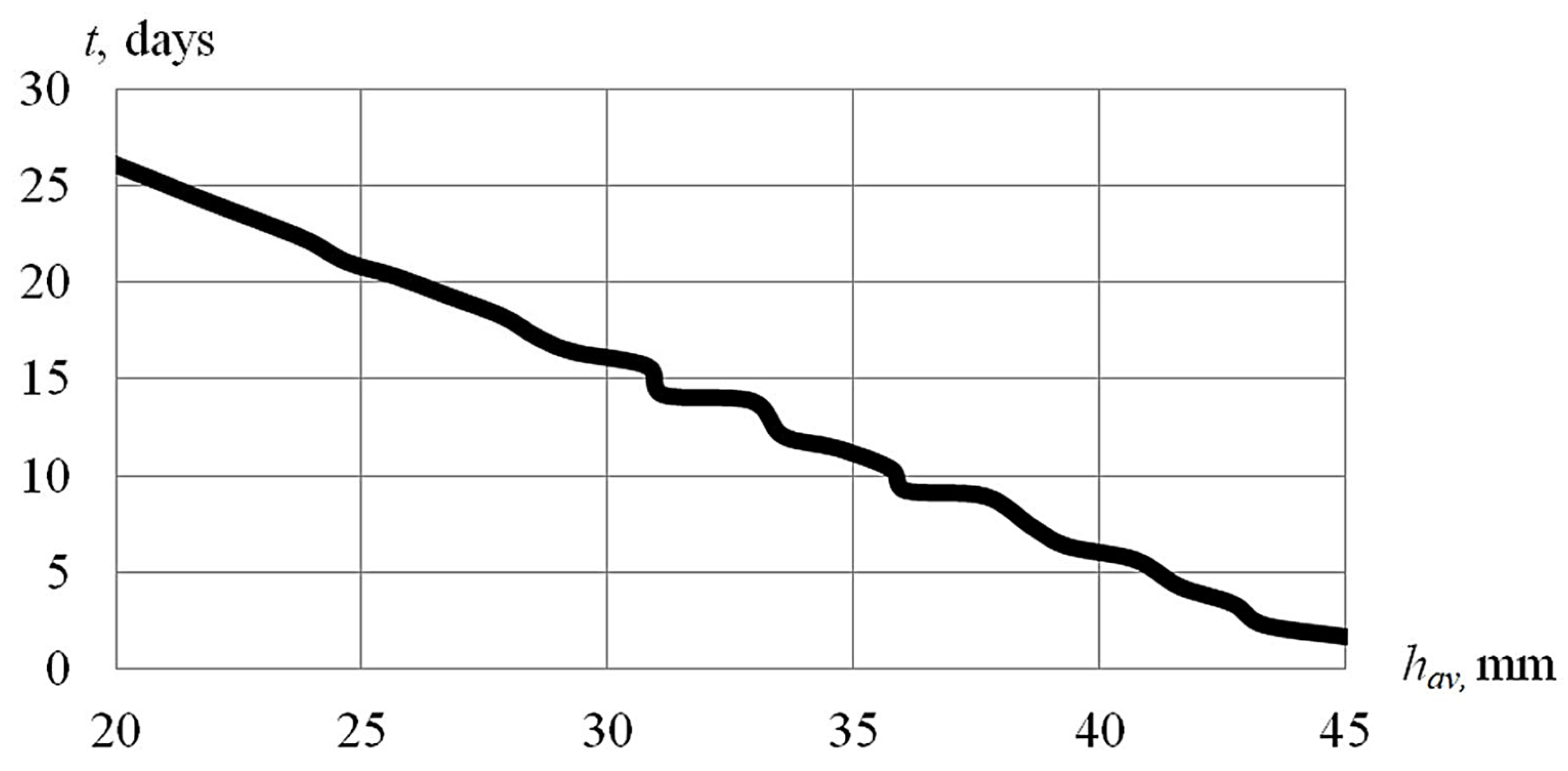
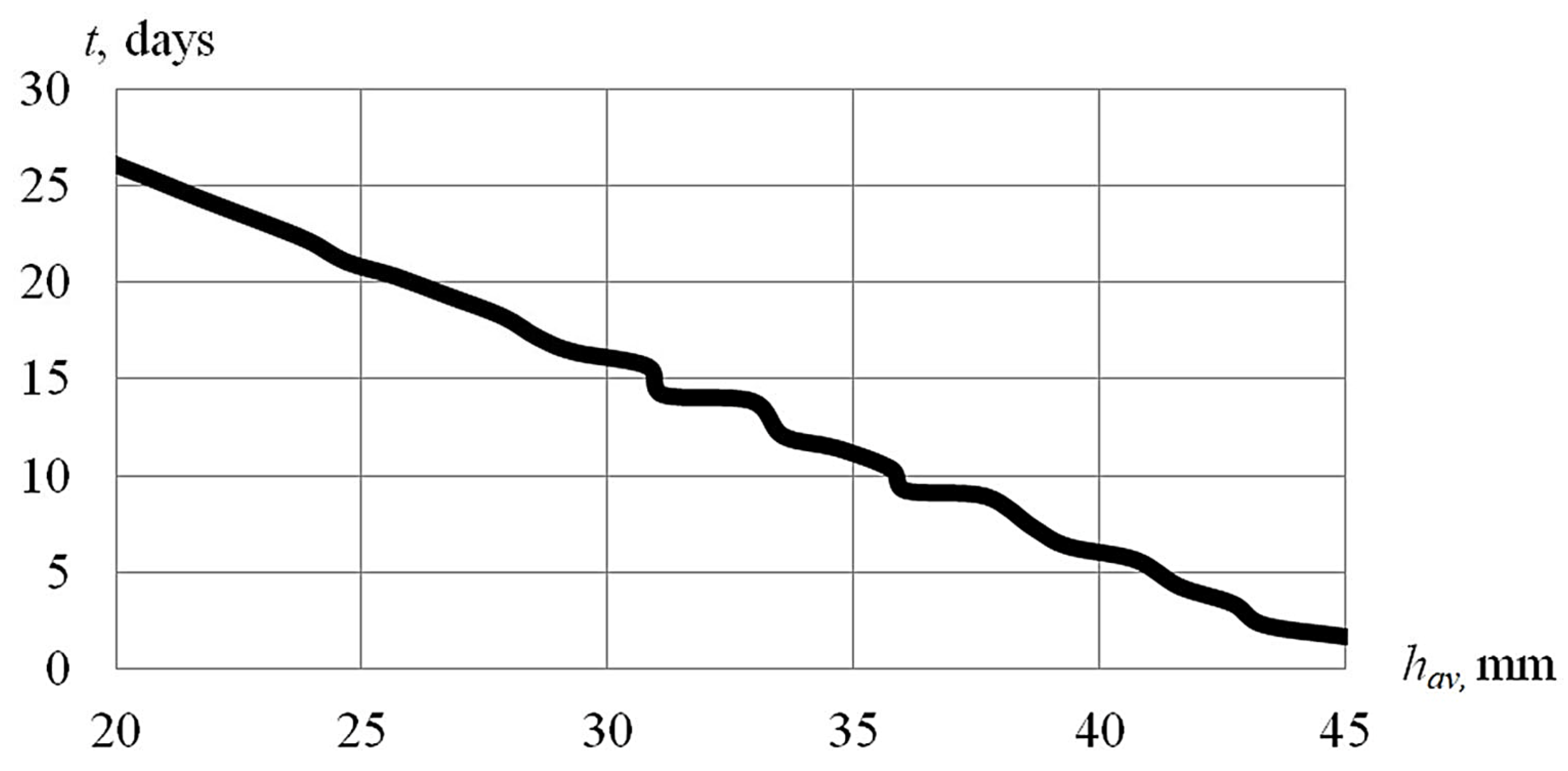
- Using the proposed mathematical model, the brush operation reliability was investigated and calculated; the minimum brush height required for the operation, the average wear rate, the mean square deviation, and the mathematical expectation of brush wear were determined. A nomogram of the brush collector assembly uptime as a function of the brush height required for the operation was modeled.
- The results of calculating and forecasting the residual life of the electric motor brushes are suggested to be implemented not only in the design of new dump trucks produced by JSC “BELAZ” but also directly by the operating enterprises performing maintenance and modernization of their fleet of dump trucks, whose electric drive, for some reason, has failed or does not meet the technical characteristics.
- The choice of the residual life prediction method was established to be justified by the accuracy and reliability of the data obtained during the experiments and operation, as well as by the requirements for the accuracy and reliability of the predicted service life of the BCA when it is further exploited. In this case, it is necessary to have a system for monitoring its technical condition.
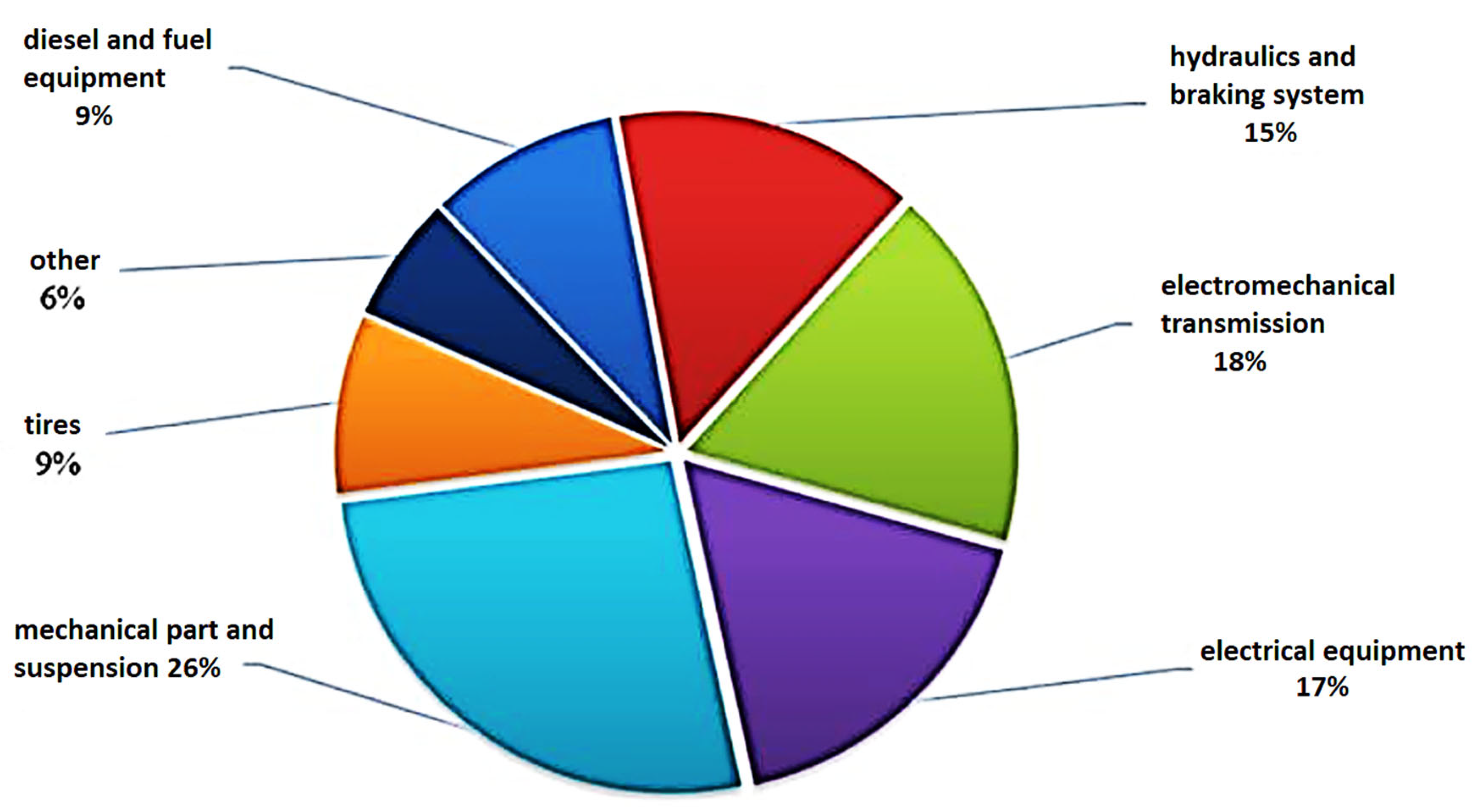
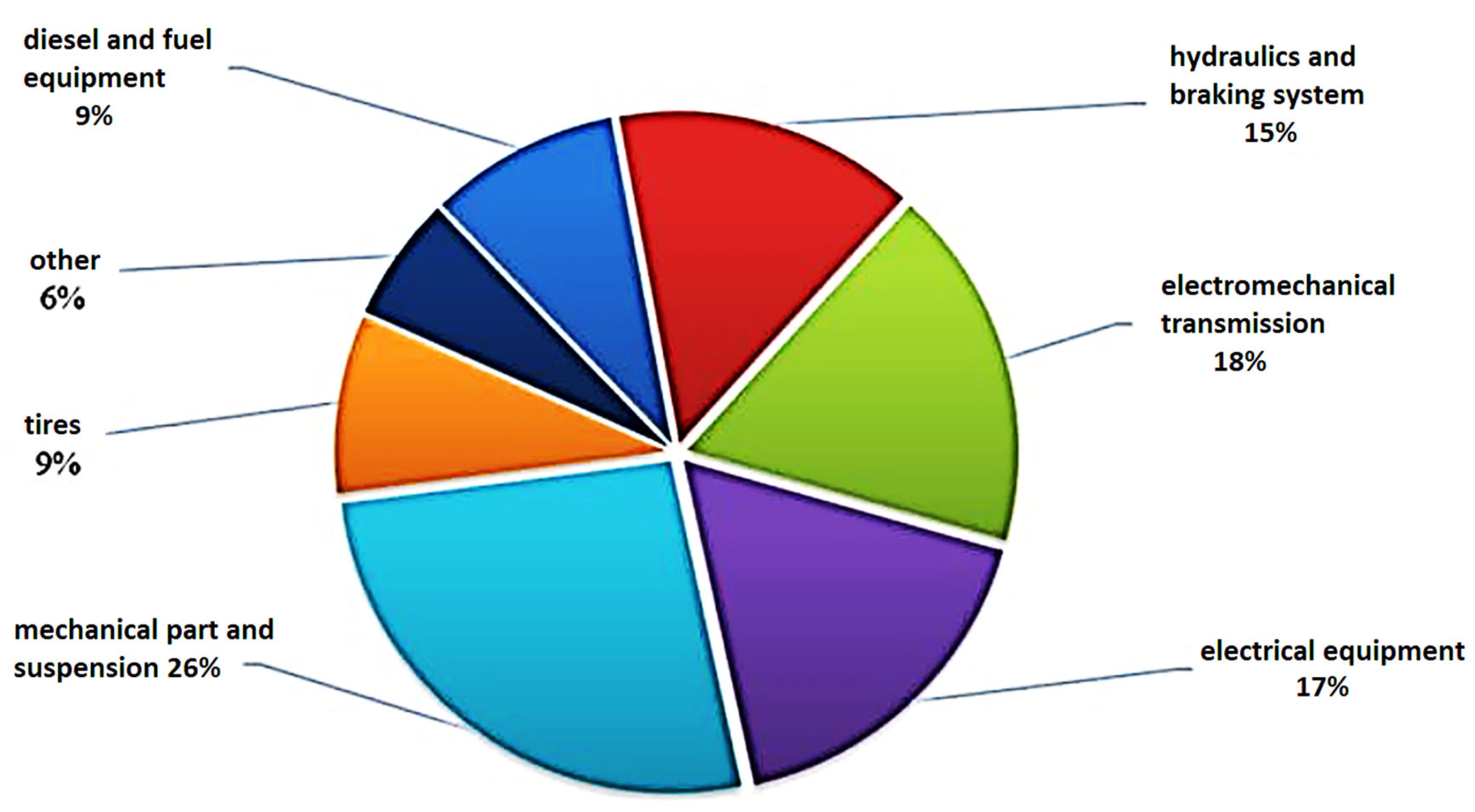
- As a result of analyzing the data on the operation of the traction motors EDP-800 of the BelAZ dump trucks, a high percentage of failures related to the wear of the brushes was revealed.
- The presented mathematical model of data processing allowed the evaluation of such parameters as the wear time and the failure-free operation of the brush, determining the vehicle mileage and the brush wear amount; the probability of the failure-free operation of the brush; the flow of failures; the remaining life of the brush before its complete wear; and the wear rate of the brush depending on the operation time. These allow conclusions about the suitability of the brush for the work in its actual technical condition.
- Future research will include collecting new technical information and a processing platform created on the basis of artificial intelligence and deep machine learning intended for processing more parametric information to determine the proportion and minimizing the number of random failures.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- The Program for the Development of the Coal Industry in Russia for the Period Up to 2035 (Approved by the Order of the Government of the Russian Federation Dated June 13, 2020 no. 1582-r). Ministry of Energy of the Russian Federation. Available online: https://minenergo.gov.ru/node/433 (accessed on 25 August 2023).
- Sychev, Y.A.; Kostin, V.N.; Serikov, V.A.; Alad’in, M.E. Analysis of non-sinusoidal regimes in power supply systems of mining enterprises with a non-linear load and capacitor units. Min. Inform. Analyt. Bull. 2023, 1, 159–179. [Google Scholar] [CrossRef]
- Khazin, M.L.; Apakashev, R.A. Mining dump trucks running on hydrogen fuel. Min. Inform. Analyt. Bull. 2022, 1, 47–59. [Google Scholar] [CrossRef]
- Makarova, I.; Mavlyautdinova, G.; Mavrin, V.; Makarov, D.; Barinov, A. Improving the Environmental Friendliness of the Mining Complex Through Alternative Fuel for Mine Dump Trucks. Transp. Res. Procedia 2023, 68, 755–760. [Google Scholar] [CrossRef]
- Siami-Irdemoosa, E.; Dindarloo, S.R. Prediction of fuel consumption of mining dump trucks: A neural networks approach. Appl. Energy 2015, 151, 77–84. [Google Scholar] [CrossRef]
- Komissarov, A.P.; Lagunova, Y.A.; Nabiullin, R.S.; Khoroshavin, S.A. Digital model of the process of excavation of rocks by the working equipment of a quarry excavator. Min. Inform. Analyt. Bull. 2022, 4, 156–168. [Google Scholar] [CrossRef]
- Abramov, B.I.; Ivanov, A.G.; Shilenkov, V.A.; Kuzmin, I.K.; Shevyrev, Y.V. Electric drive of modern mine hoisting machines. Min. Inform. Analyt. Bull. 2022, 5-2, 145–162. [Google Scholar] [CrossRef]
- Kosmodamiansky, A.S.; Inkov, Y.M.; Menshchikov, I.A.; Batashov, S.I. Diagnostics of Traction Electric Motors of Electric Rolling Stock Using Artificial Neural Networks. Russ. Electr. Eng. 2022, 93, 576–583. [Google Scholar] [CrossRef]
- Ekanayake, S.; Dutta, R.; Rahman, M.F.; Xiao, D. Direct torque and flux control of interior permanent magnet synchronous machine in deep flux-weakening region. IET Electr. Power Appl. 2018, 12, 98–105. [Google Scholar] [CrossRef]
- Yu, Y.; Cong, L.; Tian, X.; Mi, Z.; Li, Y.; Fan, Z.; Fan, H. A stator current vector orientation based multi-objective integrative suppressions of flexible load vibration and torque ripple for PMSM considering electrical loss. CES Trans. Electr. Mach. Syst. 2020, 4, 161–171. [Google Scholar] [CrossRef]
- Martyushev, N.V.; Malozyomov, B.V.; Sorokova, S.N.; Efremenkov, E.A.; Qi, M. Mathematical Modeling the Performance of an Electric Vehicle Considering Various Driving Cycles. Mathematics 2023, 11, 2586. [Google Scholar] [CrossRef]
- Kachin, O.S.; Karakulov, S.A.; Serov, A.B. An Analysis of the Main Factors on the Wear of Brushes for Brush-Type Motors and the Ways of Increasing their Lifetime. Appl. Mech. Mater. 2015, 792, 107–112. [Google Scholar] [CrossRef]
- Meskhi, B.C.; Pleshko, M.S.; Voinov, I.V.; Kaishau, Z.Z. Ensuring the safe operation of transport tunnels based on predictive modeling of intensive geomechanical processes. Min. Inform. Analyt. Bull. 2020, 8, 86–96. [Google Scholar] [CrossRef]
- Mao, Y.; Zuo, S.; Cao, J. Effects of Rotor Position Error on Longitudinal Vibration of Electric Wheel System in In-Wheel PMSM Driven Vehicle. IEEE/ASME Trans. Mechatron. 2018, 23, 1314–1325. [Google Scholar] [CrossRef]
- Gerike, P.B.; Gerike, B.L. Formation of a single diagnostic criterion for assessing the technical condition of mining equipment. Min. Equip. Electromech. 2021, 2, 17–22. [Google Scholar]
- Malozyomov, B.V.; Martyushev, N.V.; Sorokova, S.N.; Efremenkov, E.A.; Qi, M. Mathematical Modeling of Mechanical Forces and Power Balance in Electromechanical Energy Converter. Mathematics 2023, 11, 2394. [Google Scholar] [CrossRef]
- Moskvichev, V.V.; Kovalev, M.A. Investigation of the reliability indicators of the main groups of equipment for open-pit hydraulic excavators. Min. Inform. Analyt. Bull. 2021, 7, 96–112. [Google Scholar] [CrossRef]
- Gerike, P.B. On a single diagnostic criterion for detecting defects in electrical machines according to the parameters of mechanical vibrations. Bull. Ural. State Min. Univ. 2019, 2, 100–106. [Google Scholar]
- Khodayar, M.E.; Wu, L.; Li, Z. Electric Vehicle Mobility in Transmission-Constrained Hourly Power Generation Scheduling. IEEE Trans. Smart Grid 2013, 4, 779–788. [Google Scholar] [CrossRef]
- Abu-Abed, F.N.; Martynov, D.V.; Sergienko, S.V.; Kordyukov, R.Y. Simulation model for evaluating the performance of the repair and diagnostic complex. Softw. Prod. Syst. 2015, 5, 107–116. [Google Scholar] [CrossRef]
- Bolvashenkov, I.; Herzog, H.G. Use of Stochastic Models for Operational Efficiency Analysis of Multi Power Source Traction Drives. In Proceedings of the 2016 Second International Symposium on Stochastic Models in Reliability Engineering, Life Science and Operations Management (SMRLO), Beer Sheva, Israel, 15–18 February 2016; pp. 124–130. [Google Scholar] [CrossRef]
- Aldannawy, H.; Rouabhi, A.; Gerbaud, L. Percussive drilling: Experimental and numerical investments-tigations. Rock Mech. Rock Eng. 2022, 55, 1555–1570. [Google Scholar] [CrossRef]
- Vinogradov, A.B.; Gnezdov, N.E.; Zhuravlev, S.V.; Sibirtsev, A.N. Results of development and testing of a set of electrical equipment for a mining dump truck with a carrying capacity of 240 tons. J. Electr. Engin. 2015, 3, 39–45. [Google Scholar]
- Faessler, B.; Kepplinger, P.; Petrasch, J. Field testing of repurposed electric vehicle batteries for price-driven grid balancing. J. Energy Storage 2019, 21, 40–47. [Google Scholar] [CrossRef]
- Zhang, W.; Yang, J.; Zhang, W.; Ma, F. Research on regenerative braking of pure electric mining dump truck. World Electr. Veh. J. 2019, 10, 39. [Google Scholar] [CrossRef]
- Martyushev, N.V.; Malozyomov, B.V.; Sorokova, S.N.; Efremenkov, E.A.; Valuev, D.V.; Qi, M. Review Models and Methods for Determining and Predicting the Reliability of Technical Systems and Transport. Mathematics 2023, 11, 3317. [Google Scholar] [CrossRef]
- Isametova, M.E.; Nussipali, R.; Martyushev, N.V.; Malozyomov, B.V.; Efremenkov, E.A.; Isametov, A. Mathematical Modeling of the Reliability of Polymer Composite Materials. Mathematics 2022, 10, 3978. [Google Scholar] [CrossRef]
- U.S. Department of Transportation. 2017 NHTS Data User Guide; Federal Highway Administration Office of Policy Information: Washington, DC, USA, 2018; Volume 2018.
- Zhang, P.; Qian, K.; Zhou, C.; Stewart, B.G.; Hepburn, D.M. A methodology for optimization of power systems demand due to electric vehicle charging load. IEEE Trans. Power Syst. 2012, 27, 1628–1636. [Google Scholar] [CrossRef]
- Martyushev, N.V.; Malozyomov, B.V.; Sorokova, S.N.; Efremenkov, E.A.; Qi, M. Mathematical Modeling of the State of the Battery of Cargo Electric Vehicles. Mathematics 2023, 11, 536. [Google Scholar] [CrossRef]
- Billinton, R.; Allan, R.N. Reliability Evaluation of Power Systems, 2nd ed.; Springer: Boston, MA, USA, 1996. [Google Scholar]
- Adefarati, T.; Bansal, R.C. Reliability assessment of distribution system with the integration of renewable distributed generation. Appl. Energy 2017, 185, 158–171. [Google Scholar] [CrossRef]
- Esau, Z.; Jayaweera, D. Reliability assessment in active distribution networks with detailed effects of PV systems. J. Mod. Power Syst. Clean Energy 2014, 2, 59–68. [Google Scholar] [CrossRef]
- Al-Muhaini, M.; Heydt, G.T. Evaluating Future Power Distribution System Reliability Including Distributed Generation. IEEE Trans. Power Deliv. 2013, 28, 2264–2272. [Google Scholar] [CrossRef]
- Billinton, R.; Allan, R.N. System reliability evaluation using probability distributions. In Reliability Evaluation of Engineering Systems; Springer: Boston, MA, USA, 1992; pp. 221–259. [Google Scholar]
- Młyńczak, M.; Nowakowski, T.; Restel, F.; Werbińska-Wojciechowska, S. Problems of Reliability Analysis of Passenger Transportation Process. In Proceedings of the European Safety and Reliability Conference, Balkema, Leiden, 2–4 October 2011; pp. 1433–1438. [Google Scholar]
- Fricker, J.D.; Whitford, R.K. Fundamentals of Transportation Engineering; A Multimodal Systems Approach; Pearson Education, Inc.: Upper Saddle River, NJ, USA, 2004; pp. 243–276. [Google Scholar]
- Levinson, H.S. The Reliability of Transit Service: An Historical Perspective. J. Urban. Technol. 2005, 12, 99–118. [Google Scholar] [CrossRef]
- Barabino, B.; Di Francesco, M.; Mozzoni, S. An Offline Framework for the Diagnosis of Time Reliability by Automatic Vehicle Location Data. IEEE Trans. Intell. Transp. Syst. 2016, 18, 583–594. [Google Scholar] [CrossRef]
- Barabino, B.; Di Francesco, M.; Mozzoni, S. Time Reliability Measures in Bus Transport Services from the Accurate use of Automatic Vehicle Location raw data. Qual. Reliab. Eng. Int. 2017, 33, 969–978. [Google Scholar] [CrossRef]
- Pulugurtha, S.S.; Imran, M.S. Modeling Basic Freeway Section Level-of-Service Based on Travel Time and Reliability. Case Stud. Transp. Policy 2020, 8, 127–134. [Google Scholar] [CrossRef]
- Zhao, L.; Guan, H.; Zhang, X.; Zhao, P.; Wang, P. Study on Travel Time Reliability Considering Route Travel Time Boundary. J. South. China Univ. Technol. 2019, 47, 127–135. [Google Scholar]
- Tu, Q.; Cheng, L.; Sun, C.; Tang, F.; Li, M. Reliability-Based Network Equilibrium Model with Truncated Stochastic Travel. Time J. Southeast. Univ. 2020, 50, 175–181. [Google Scholar]
- Zheng, L.; Hensher, D.A.; Rose, J.M. Willingness to Pay for Travel Time Reliability in Passenger Transportation: A Review and some New Empirical Evidence. Transp. Res. Part. E Logist. Transp. Rev. 2010, 46, 384–403. [Google Scholar]
- Malozyomov, B.V.; Martyushev, N.V.; Konyukhov, V.Y.; Oparina, T.A.; Zagorodnii, N.A.; Efremenkov, E.A.; Qi, M. Mathematical Analysis of the Reliability of Modern Trolleybuses and Electric Buses. Mathematics 2023, 11, 3260. [Google Scholar] [CrossRef]
- Lacey, G.; Putrus, G.; Bentley, E. Smart EV charging schedules: Supporting the grid and protecting battery life. IET Electr. Syst. Transp. 2017, 7, 84–91. [Google Scholar] [CrossRef]
- Salvatti, G.A.; Carati, E.G.; Cardoso, R.; da Costa, J.P.; Stein, C.M.D.O. Electric Vehicles Energy Management with V2G/G2V Multifactor Optimization of Smart Grids. Energies 2020, 13, 1191. [Google Scholar] [CrossRef]
- Chakrabarti, S. The Demand for Reliable Transit Service: New Evidence Using Stop Level Data from the Los Angeles Metro Bus System. J. Transp. Geogr. 2015, 48, 154–164. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Inspection | Engine Run Time | Mileage |
|---|---|---|
| Daily maintenance (DMS) | ||
| Dump truck maintenance (TM-1) | 250 h of operation | 5000 km of tipper mileage |
| Dump truck maintenance (TM-2) | 500 h of operation | 10,000 km mileage of the truck |
| Dump truck maintenance (TM-3) | 1000 h of operation | 20,000 km run of the truck |
| Seasonal maintenance (SMA) | Performed when preparing the truck for spring–summer or autumn–winter operating conditions |
| Parameter Name | Value |
|---|---|
| Power at the generator output, kW, not more | 1600 |
| DC bus voltage (at the output of rectifiers), V: | |
| in traction mode, not more than | 1000 |
| in braking mode, not more than | 1200 |
| Power of the braking resistor unit, kW | 2 × 1200 |
| Power on the shaft of the asynchronous motor, kW: | |
| in long traction mode (ultimate) | 700 |
| in prolonged braking mode | 1200 |
| Maximum starting torque on the motor shaft, kNm | 30 |
| Maximum rotation speed of the asynchronous traction motor, rpm | 3000 |
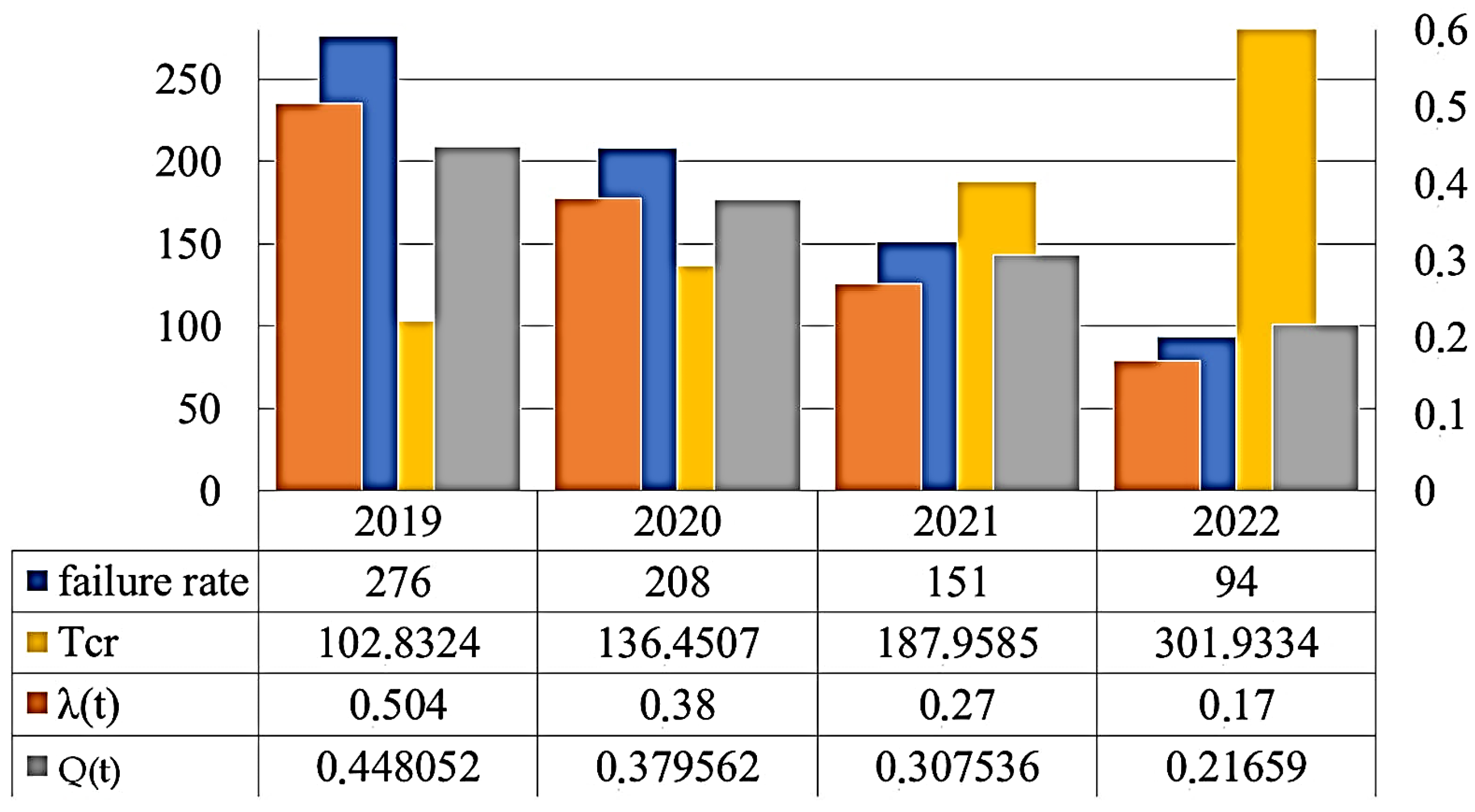
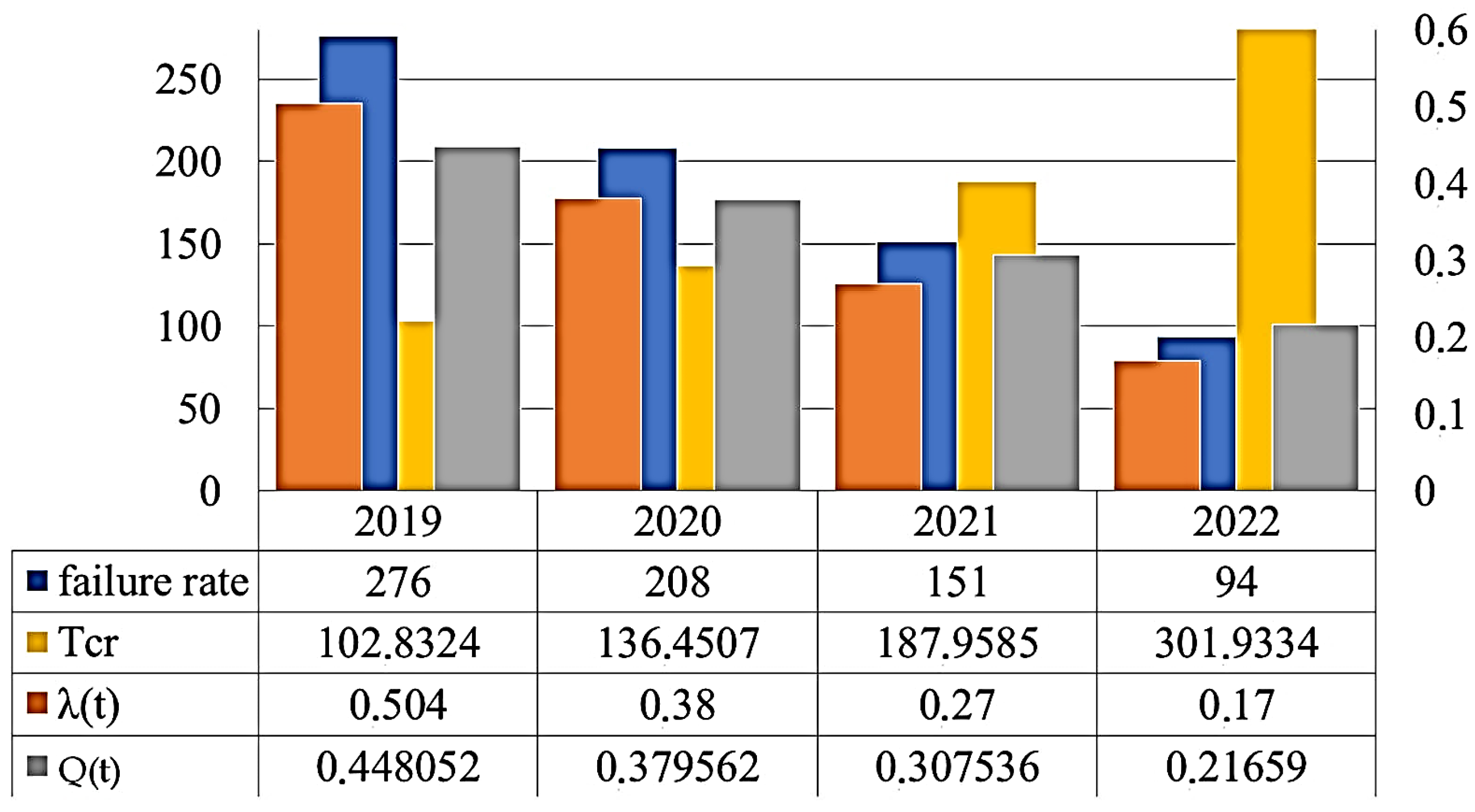
| Number of TEMs That Failed Due to the Switchgear and Controlgear | λ(t) 1/h | P(t) | Q(t) | Average (Expected) Service Life, Tcf, h |
|---|---|---|---|---|
| 120 | 0.504 | 0.448052 | 0.551948 | 102.8324 |
| 60 | 0.38 | 0.379562 | 0.620438 | 136.4507 |
| 22 | 0.27 | 0.307536 | 0.692464 | 187.9585 |
| 20 | 0.17 | 0.21659 | 0.78341 | 301.9334 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Martyushev, N.V.; Malozyomov, B.V.; Filina, O.A.; Sorokova, S.N.; Efremenkov, E.A.; Valuev, D.V.; Qi, M. Stochastic Models and Processing Probabilistic Data for Solving the Problem of Improving the Electric Freight Transport Reliability. Mathematics 2023, 11, 4836. https://doi.org/10.3390/math11234836
Martyushev NV, Malozyomov BV, Filina OA, Sorokova SN, Efremenkov EA, Valuev DV, Qi M. Stochastic Models and Processing Probabilistic Data for Solving the Problem of Improving the Electric Freight Transport Reliability. Mathematics. 2023; 11(23):4836. https://doi.org/10.3390/math11234836
Chicago/Turabian StyleMartyushev, Nikita V., Boris V. Malozyomov, Olga A. Filina, Svetlana N. Sorokova, Egor A. Efremenkov, Denis V. Valuev, and Mengxu Qi. 2023. "Stochastic Models and Processing Probabilistic Data for Solving the Problem of Improving the Electric Freight Transport Reliability" Mathematics 11, no. 23: 4836. https://doi.org/10.3390/math11234836
APA StyleMartyushev, N. V., Malozyomov, B. V., Filina, O. A., Sorokova, S. N., Efremenkov, E. A., Valuev, D. V., & Qi, M. (2023). Stochastic Models and Processing Probabilistic Data for Solving the Problem of Improving the Electric Freight Transport Reliability. Mathematics, 11(23), 4836. https://doi.org/10.3390/math11234836