
Proactive Coordination of Traffic Guidance and Signal Control for a Divergent Network


Abstract
:1. Introduction
- (1)
- The key innovation lies in the proactive coordination approach, allowing VMS to guide drivers based on system optimization while respecting compliance rates and preferred traffic signal operations.
- (2)
- The approach integrates traffic guidance and signal control systems, with traffic signal control setting upper bounds for information deviation, and the traffic guidance system providing demand predictions, ultimately optimizing network-level performance.
- (3)
- The proactive coordination strategy demonstrates flexibility, particularly in scenarios with sudden changes in traffic conditions, such as accidents or events, where it outperforms reactive and independent strategies.
2. The Proposed Method
2.1. The Overall Logical Architecture
- Control input: The system utilizes traffic demand, and traffic states as the control input.
- Optimizer: The optimizer can accomplish the joint optimization of the proactive signal operation and VMS guidance strategies. The objective function of the optimizer is to minimize the total travel time of all drivers in the divergent network.
- Flow split estimation and traffic state prediction: The general route choice behavior can be estimated on the basis of a given VMS strategy. The route choice behavior model together with the compliance behavior model can estimate the flow split rate, which can further impact traffic states. The change in traffic states will result in a different satisfaction rate. Correspondingly, the previous compliance rate will be updated. An equilibrium and convergence process exists, as shown on the right side of Figure 1.
- Control output: The controlled traffic states are sent back to the optimizer to evaluate the objective function. Improved coordinated strategies are obtained at the end of the entire control process.
2.2. Route Choice Behavior Model
2.2.1. Stated Preference Survey
- Sociodemographic attributes of drivers: Age, gender, personal income, household income, driving years, average annual mileage, educational level, occupation, and car type.
- Preference information: Diversion behavior of drivers to VMS; satisfaction degree of drivers in VMS compared with their actual experience.
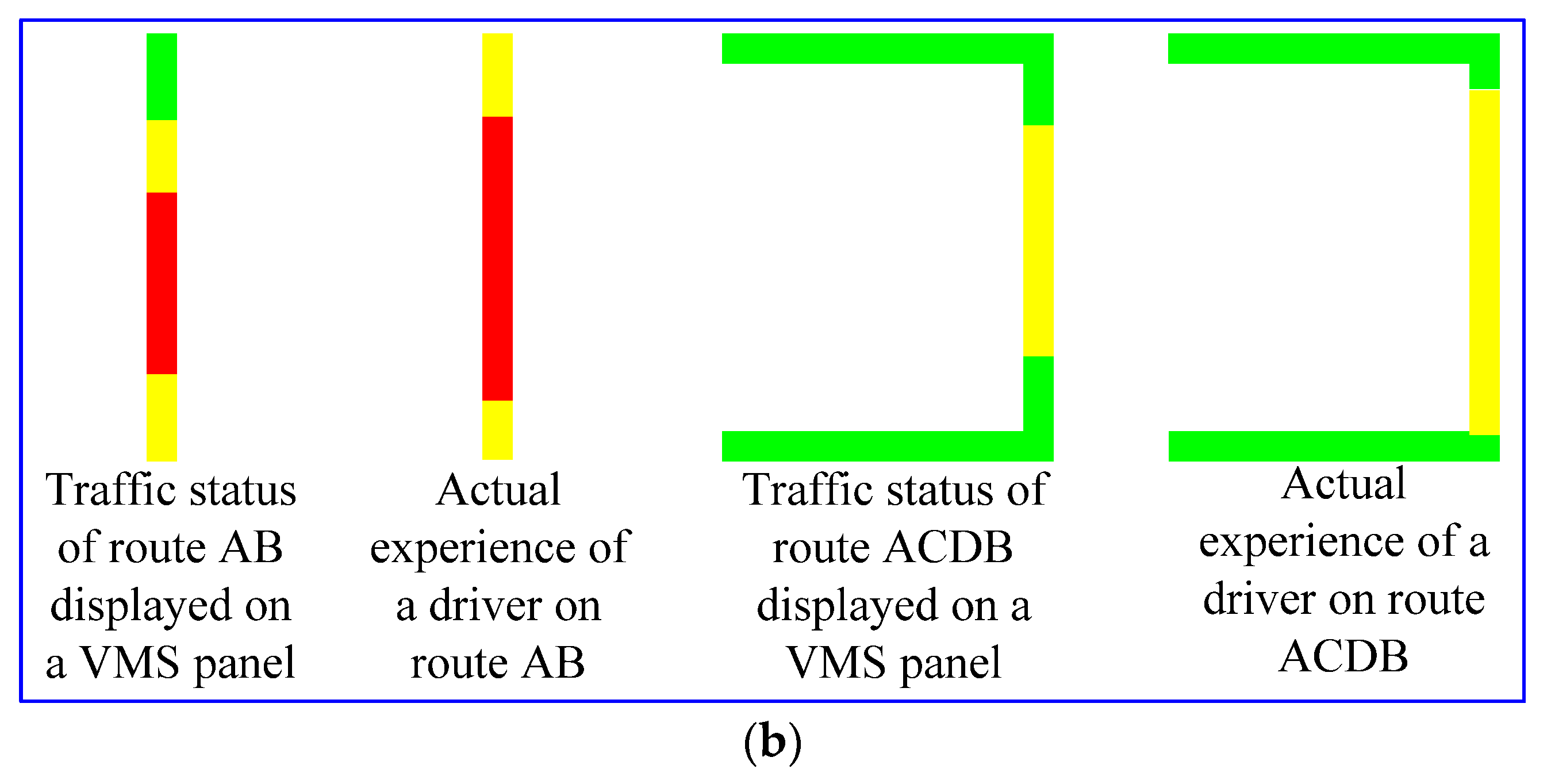
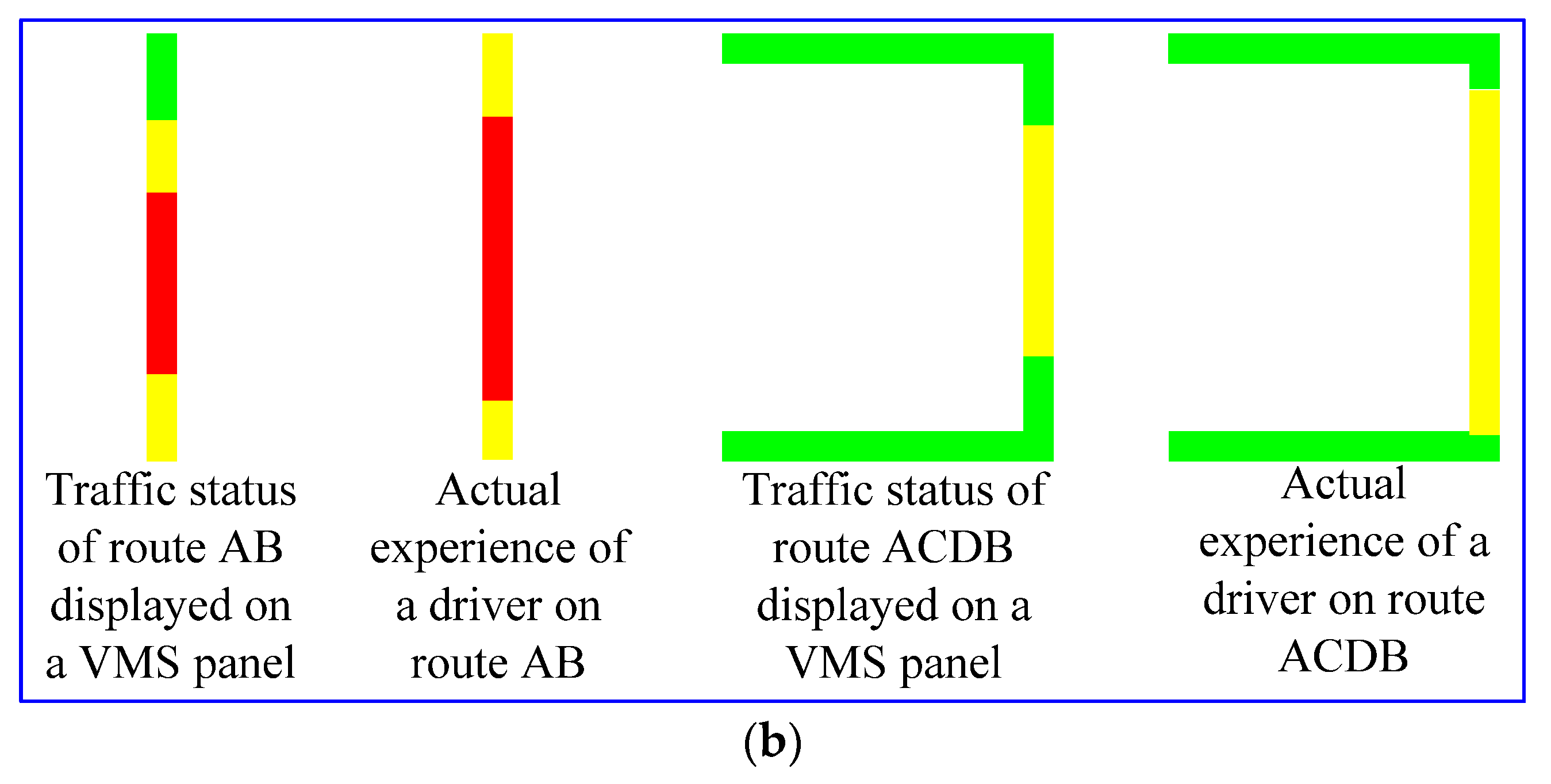
- Dynamic graphics information on VMS panels (Figure 2): Lengths of the pre-trip route (AB) and detour route (ACDB); color ratios of green, yellow, and red ratios on each route; diversion advice.
2.2.2. En-Route Route Choice Module
2.2.3. Satisfaction Degree Module
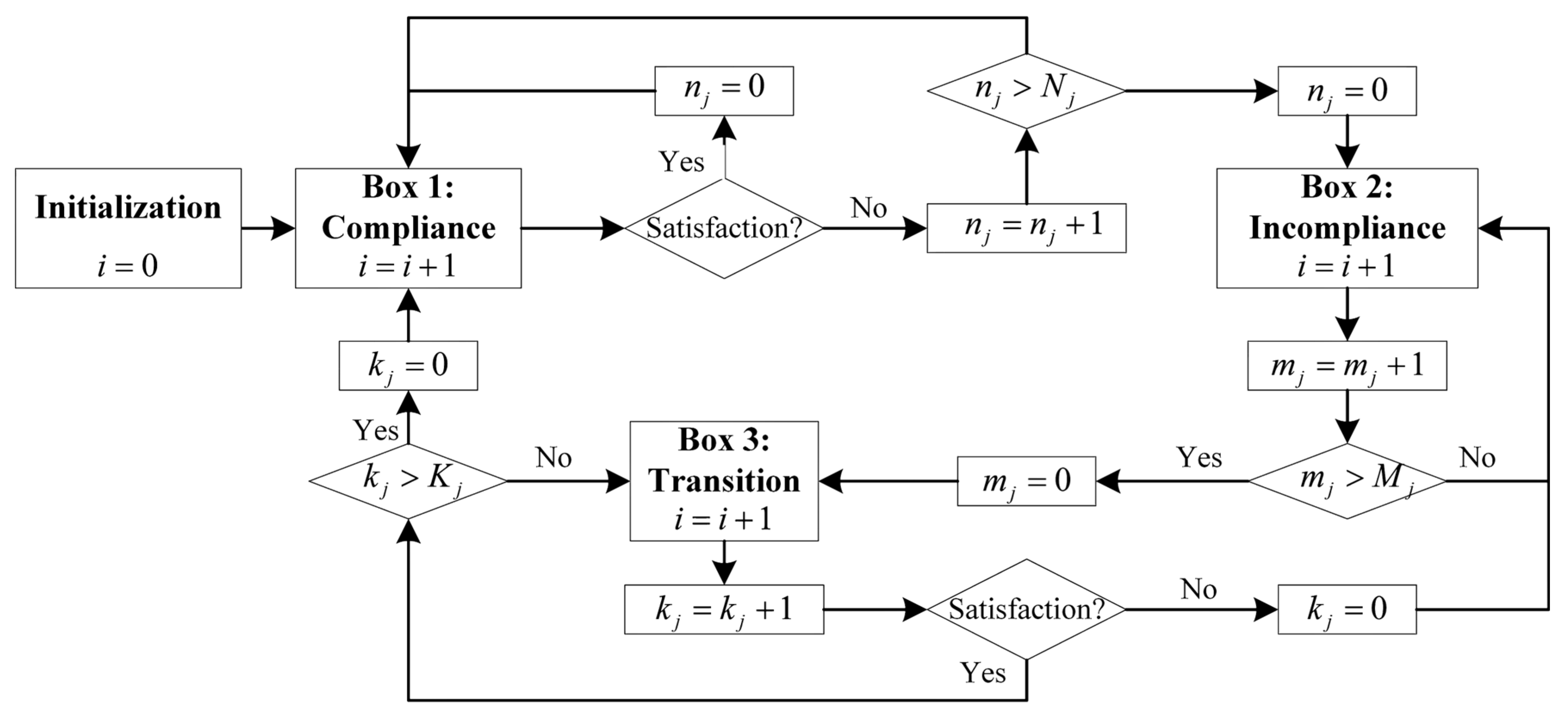
2.2.4. Learning Process Module
- If continuous dissatisfaction number , the agent transitions from compliance to incompliance status;
- If continuous incompliance number , the agent transitions from incompliance to transition status;
- If dissatisfaction occurs during the transition period, the agent transitions from the transition to incompliance status;
- If the number of continuous transitions , the agent transitions from the transition to compliance status.
2.2.5. Relationship between Satisfaction Rate and Compliance Rate
2.3. Coordinated Mechanism of Traffic Guidance and Signal Control
2.3.1. Optimization Model
- Reactive-Independent (RI) strategy. The traffic guidance system simply displays the current traffic status information. While the signal control system adjusts signal timing based on the upstream detection of traffic flow. This strategy is similar to the current practice.
- Reactive-Coordinated (RC) strategy. The traffic guidance system only displays the current traffic status information. The route choice model estimates the dynamic flow split at the diverging location. Such a flow split is an essential input to the signal control system for signal timing optimization. In this sense, the traffic signal control system is coordinated with the traffic guidance system to optimize signal timings.
- Proactive-Independent (PI) strategy. The traffic guidance system can actively adjust the information provision by VMS in order to obtain a better split of traffic flow at the diverging location. While the traffic signal control system does not have any input from the traffic guidance system but only relies on traffic detection.
- PC strategy. The traffic guidance system can actively adjust the information provision by VMS. In addition, the traffic control system can coordinate with the traffic guidance system for improved flow splits at diverging locations along each route considering dynamic demand and behavior.
- Flow conservation constraint
- Constraints for the traffic guidance parameters
- Estimation of the split rate
- Constraints for the traffic signal control
- Traffic state prediction
- Estimation of the satisfaction rate of drivers
- Estimation of the compliance rate of drivers
2.3.2. Solution Procedure
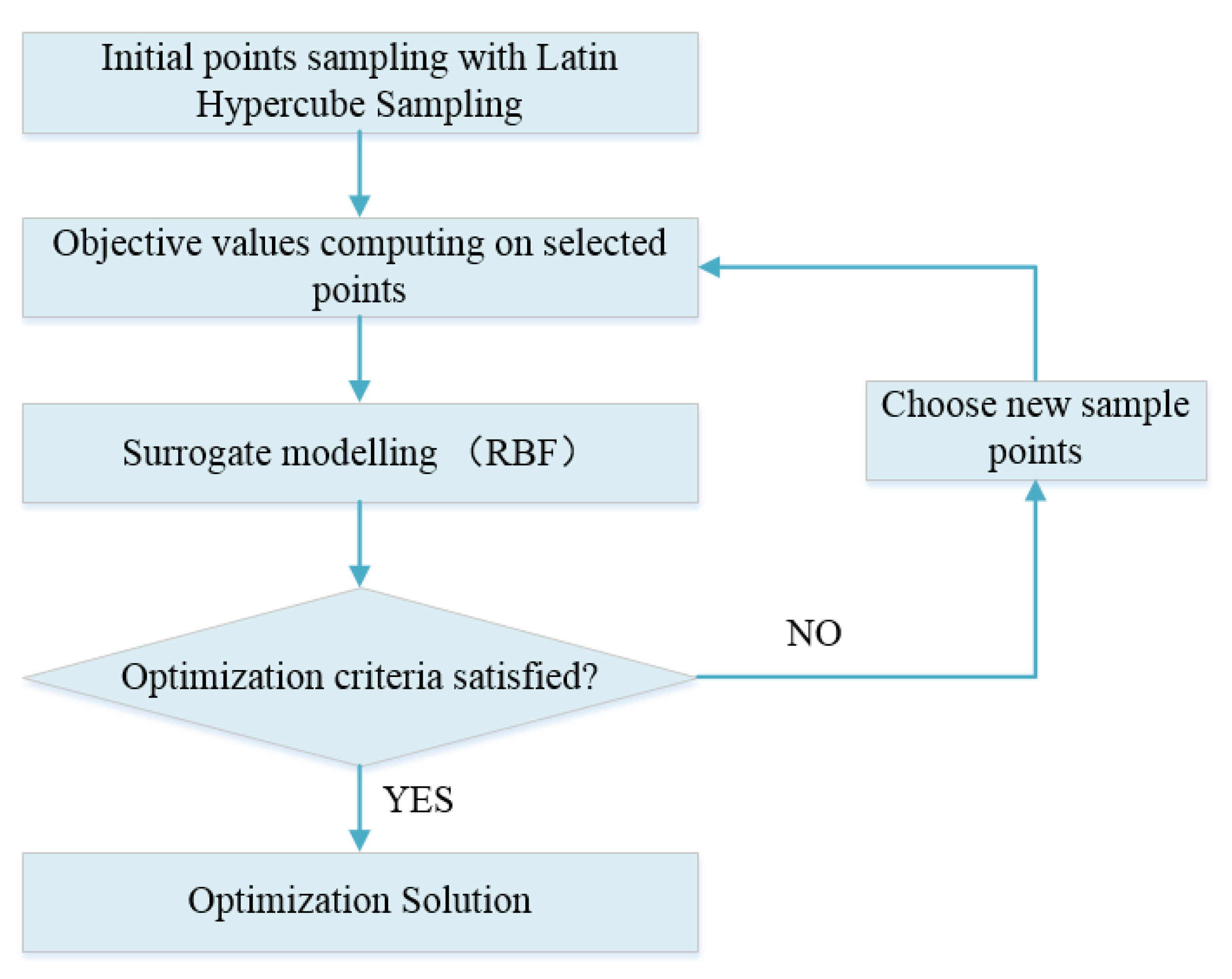
- Step 1. Initial point sampling is conducted with Latin hypercube sampling.
- Step 2. Objective values are calculated on the selected points.
- Step 3. Surrogate modeling is performed (by the radial basis function in this study).
- Step 4. If the stopping criteria have been met, Step 5 is performed; otherwise, a random sampling strategy is used in the current surrogate model to determine the subsequent group of points to evaluate, and Step 2 is repeated.
- Step 5. The minimum objective function value of all points in the group is generated as the final solution.
3. Experimental Results
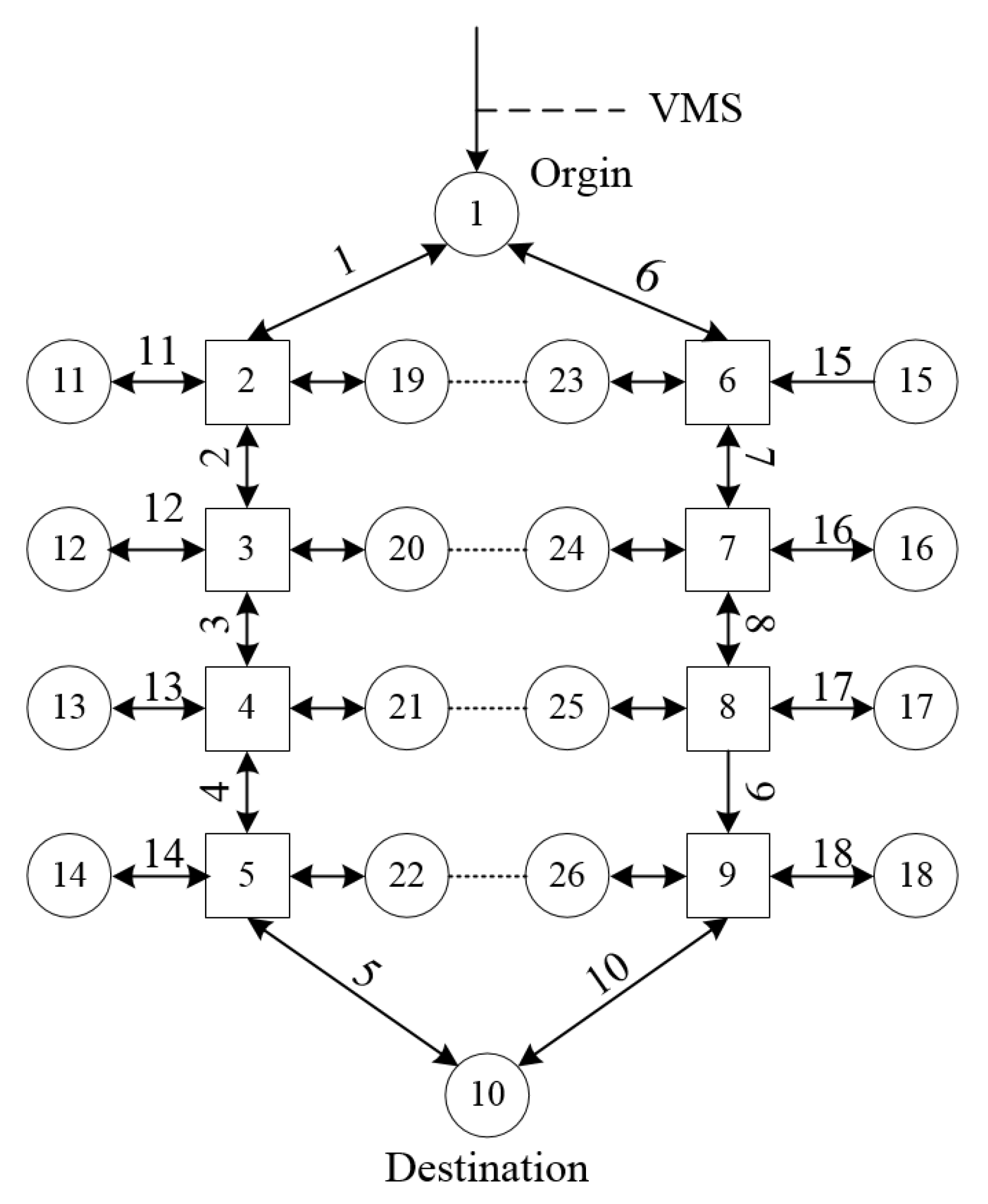
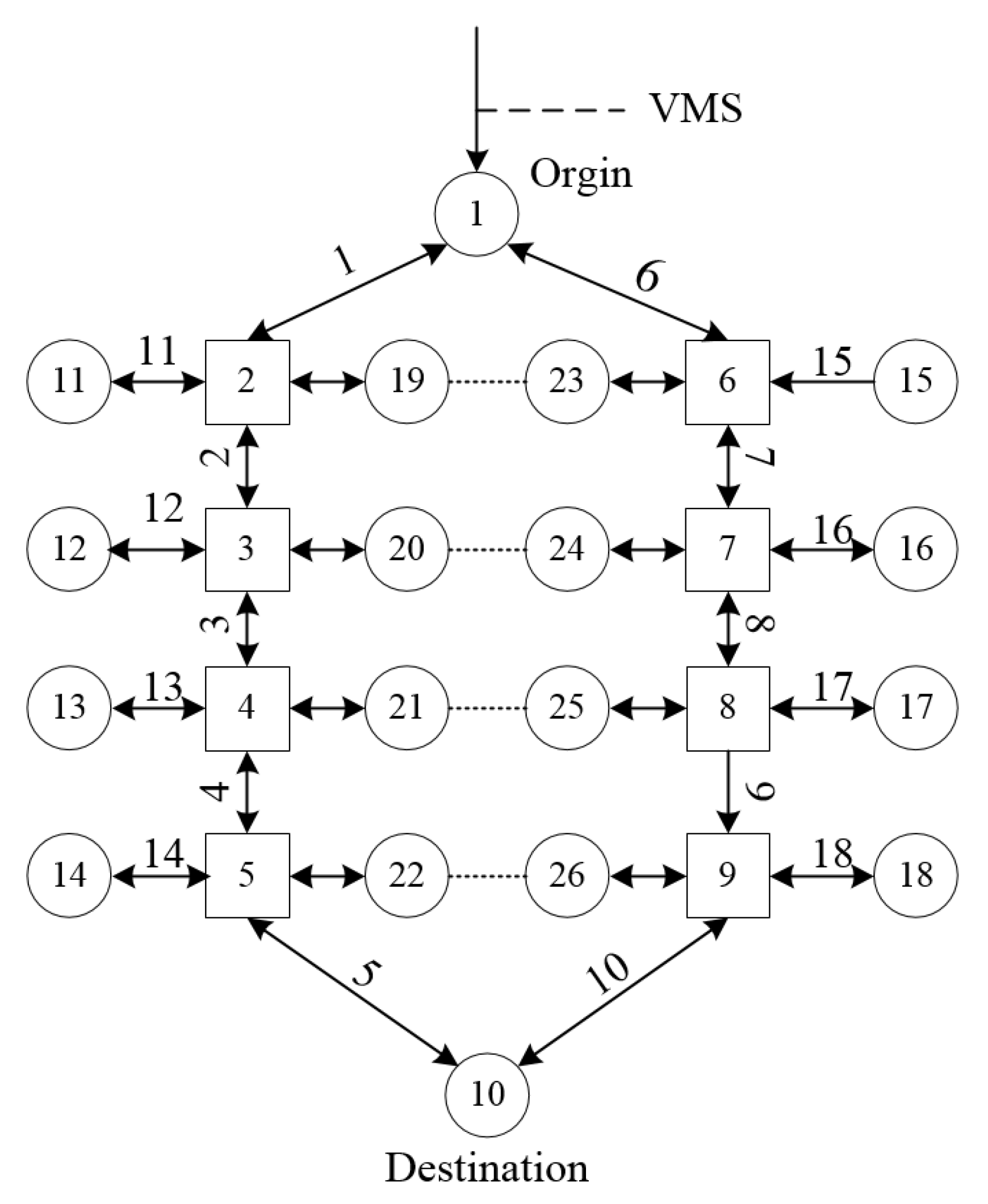
3.1. Network Setup and Parameter Settings
3.2. Optimization Results
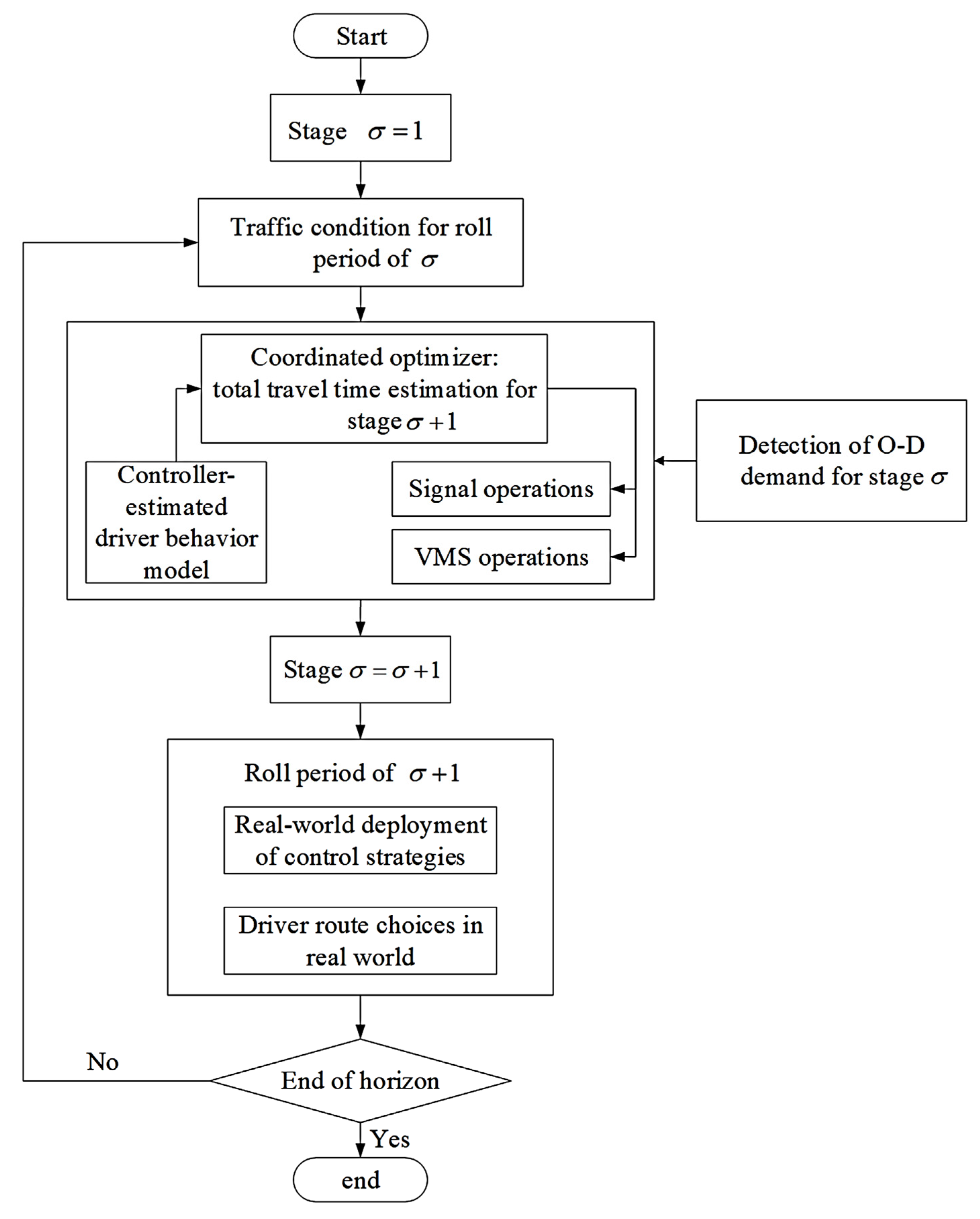
3.2.1. Real-Time Traffic Control under Rolling Horizon Framework
3.2.2. Robustness Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hadjidimitriou, N.S.; Lippi, M.; Mamei, M. A data driven approach to match demand and supply for public transport planning. IEEE Trans. Intell. Transp. Syst. 2020, 22, 6384–6394. [Google Scholar] [CrossRef]
- Hrelja, R.; Khan, J.; Pettersson, F. How to create efficient public transport systems? A systematic review of critical problems and approaches for addressing the problems. Transp. Pol. 2020, 98, 186–196. [Google Scholar] [CrossRef]
- Poulopoulou, M.; Spyropoulou, I. Active traffic management in urban areas: Is it effective for professional drivers? The case of variable message signs. Transp. Res. Part A Pol. Pract. 2019, 130, 412–423. [Google Scholar] [CrossRef]
- Schweizer, J.; Poliziani, C.; Rupi, F.; Morgano, D.; Magi, M. Building a large-scale micro-simulation transport scenario using big data. Int. J. Geo-Inf. 2021, 10, 165. [Google Scholar] [CrossRef]
- Osorio, C.; Bierlaire, M. A Surrogate Model for Traffic Optimization of Congested Networks: An Analytic Queueing Network Approach; Report Transp-OR 090825; Ecole Polytechnique F’ed’erale de Lausanne: Lausanne, Switzerland, 2009; pp. 1–23. [Google Scholar]
- Rodriguez-Roman, D.; Ritchie, S.G. Surrogate-based optimization for multi-objective toll design problems. Transp. Res. Part A Pol. Pract. 2020, 137, 485–503. [Google Scholar] [CrossRef]
- Bliek, L. A Survey on Sustainable Surrogate-Based Optimisation. Sustainability 2022, 14, 3867, Towards. Sustain. AI. 2022, 161. [Google Scholar] [CrossRef]
- Wang, R.; Li, J.; Bai, R. Prediction and Analysis of Container Terminal Logistics Arrival Time Based on Simulation Interactive Modeling: A Case Study of Ningbo Port. Mathematics 2023, 11, 3271. [Google Scholar] [CrossRef]
- Diop, E.B.; Zhao, S.; Song, S.; Van, D. Modelling travellers’ route switching behaviour in response to variable message signs using the technology acceptance model. Transport 2020, 35, 533–547. [Google Scholar] [CrossRef]
- Chen, X.; Chen, Y.; Saunier, N.; Sun, L. Scalable low-rank tensor learning for spatiotemporal traffic data imputation. Transp. Res. Part C Emerg. Technol. 2021, 129, 103226. [Google Scholar] [CrossRef]
- Cantarella, G.E.; Watling, D.; De Luca, S.; Di Pace, R. Dynamics and Stochasticity in Transportation Systems: Tools for Transportation Network Modelling; Elsevier: Amsterdam, The Netherlands, 2019. [Google Scholar]
- Zhao, X.; Wan, C.; Bi, J. Day-to-day assignment models and traffic dynamics under information provision. Netw. Spat. Econ. 2019, 19, 473–502. [Google Scholar] [CrossRef]
- Moradi, H.; Sasaninejad, S.; Wittevrongel, S.; Walraevens, J. The contribution of connected vehicles to network traffic control: A hierarchical approach. Transp. Res. Part C Emerg. Technol. 2022, 139, 103644. [Google Scholar] [CrossRef]
- Almadi, A.I.M.; Mamlook, R.E.; Almarhabi, Y.; Ullah, I.; Jamal, A.; Bandara, N. A fuzzy-logic approach based on driver decision-making behavior modeling and simulation. Sustainability 2022, 14, 8874. [Google Scholar] [CrossRef]
- Ozbay, K.; Bartin, B. Estimation of economic impact of VMS route guidance using microsimulation. Res. Transp. Econ. 2004, 8, 215–241. [Google Scholar] [CrossRef]
- Xu, T.; Hao, Y.; Peng, Z.R.; Sun, L.J. Anticipatory En Route Guidance Consistent with Drivers’ Diversion Behavior: Methodology and Case Study. In Proceedings of the Transportation Research Board 93rd Annual Meeting, Washington, DC, USA, 7–14 January 2014; Volume 14. [Google Scholar]
- Chen, Y.; Shafi, S.Y.; Chen, Y. Simulation pipeline for traffic evacuation in urban areas and emergency traffic management policy improvements through case studies. Transp. Res. Interdiscip. Perspect. 2020, 7, 100210. [Google Scholar] [CrossRef]
- Qadri, S.S.S.M.; Gökçe, M.A.; Öner, E. State-of-art review of traffic signal control methods: Challenges and opportunities. Eur. Transp. Res. Rev. 2020, 12, 55. [Google Scholar] [CrossRef]
- Vatchova, B.; Boneva, Y. Design of Fuzzy and Conventional Controllers for Modeling and Simulation of Urban Traffic Light System with Feedback Control. Mathematics 2023, 11, 373. [Google Scholar] [CrossRef]
- Su, H.; Zhong, Y.D.; Chow, J.Y.J.; Dey, B.; Jin, L. EMVLight: A multi-agent reinforcement learning framework for an emergency vehicle decentralized routing and traffic signal control system. Transp. Res. Part C Emerg. Technol. 2023, 146, 103955. [Google Scholar] [CrossRef]
- Huang, R.; Han, L.D.; Huang, Z. A new network equilibrium flow model: User-equilibrium with quantity adjustment. Transp. Res. Part E Logist. Transp. Rev. 2022, 163, 102719. [Google Scholar] [CrossRef]
- Ameli, M.; Lebacque, J.P.; Leclercq, L. Improving traffic network performance with road banning strategy: A simulation approach comparing user equilibrium and system optimum. Simul. Model. Pract. Theory 2020, 99, 101995. [Google Scholar] [CrossRef]
- Abdelkader, G.; Elgazzar, K.; Khamis, A. Connected vehicles: Technology review, state of the art, challenges and opportunities. Sensors 2021, 21, 7712. [Google Scholar] [CrossRef]
- Zheng, B.; Hong, Z.; Tang, J.; Han, M.; Chen, J.; Huang, X. A Comprehensive Method to Evaluate Ride Comfort of Autonomous Vehicles under Typical Braking Scenarios: Testing, Simulation and Analysis. Mathematics 2023, 11, 474. [Google Scholar] [CrossRef]
- Claes, R.; Holvoet, T. Maintaining a distributed symbiotic relationship using delegate multiagent systems. In Proceedings of the 2010 Winter Simulation Conference; IEEE: New York, NY, USA, 2010; pp. 2981–2990. [Google Scholar]
- Abdelghany, K.; Hashemi, H.; Khodayar, M.E. A decision support system for proactive-robust traffic network management. IEEE Trans. Intell. Transp. Syst. 2018, 20, 297–312. [Google Scholar] [CrossRef]
- Yin, Y.; Yang, H. Simultaneous determination of the equilibrium market penetration and compliance rate of advanced traveler information systems. Transp. Res. Part A Pol. Pract. 2003, 37, 165–181. [Google Scholar] [CrossRef]
- Lo, H.K.; Tung, Y.K. Network with degradable links: Capacity analysis and design. Transp. Res. Part B Methodol. 2003, 37, 345–363. [Google Scholar] [CrossRef]
- Lindsey, R.; Daniel, T.; Gisches, E.; Rapoport, A. Pre-trip information and route-choice decisions with stochastic travel conditions: Theory. Transp. Res. Part B Methodol. 2014, 67, 187–207. [Google Scholar] [CrossRef]
- Liu, W.; Hua, M.; Deng, Z.; Meng, Z.; Huang, Y.; Hu, C.; Song, S.; Gao, L.; Liu, C.; Shuai, B.; et al. A systematic survey of control techniques and applications in connected and automated vehicles. In IEEE Internet of Things Journal; IEEE: New York, NY, USA, 2023. [Google Scholar]
- Ali, Y.; Sharma, A.; Haque, M.M.; Zheng, Z.; Saifuzzaman, M. The impact of the connected environment on driving behavior and safety: A driving simulator study. Accid. Anal. Prev. 2020, 144, 105643. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Liang, Y. Variable message sign location selection basing on drivers’ perception. Transp. Res. Procedia 2017, 25, 1745–1754. [Google Scholar] [CrossRef]
- Mao, C.; Zou, M.; Liu, Y.; Xue, W. Comparison of Agent-based Modeling and Equation-based Modeling for Transportation Behavioral Studies. CICTP 2015, 3610–3625. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Explanation |
|---|---|
| distance of the route A-B | |
| distance of the route A-C-D-B | |
| red segment ratio of the route A-B | |
| red segment ratio of the route A-C-D-B | |
| 1 denotes that the recommended route is A-C-D-B; 0 denotes that the recommended route is A-B | |
| differences between displayed RLR and realized RLR for certain route: (+): realized RLR is bigger than displayed RLR; (−): realized RLR is smaller than displayed RLR | |
| utility of individual n choosing the alternative route | |
| utility of individual n satisfied with traffic guidance | |
| probability that individual n chooses an alternative route | |
| satisfaction degree that individual n is satisfied with the VMS guidance | |
| guidance compliance rate | |
| SR | satisfaction rate |
| Variables | Coefficient | Estimates | Standard Error | Significance |
|---|---|---|---|---|
| 0.965 | 0.096 | 0.001 | ||
| −0.439 | 0.076 | 0.001 | ||
| 3.510 | 0.606 | 0.000 | ||
| −6.240 | 1.371 | 0.000 | ||
| 0.431 | 0.211 | 0.000 | ||
| Constant | −3.032 | 1.314 | 0.021 |
| Variables | Coefficient | Estimates | Standard Error | Significance |
|---|---|---|---|---|
| −8.851 | 1.332 | 0.000 | ||
| Constant | 2.935 | 1.019 | 0.004 |
| Static Information | Notation |
|---|---|
| Agent ID | |
| Threshold for the number of continuous dissatisfaction | |
| Threshold for the number of continuous incompliance | |
| Threshold for the number of continuous transition |
| Dynamic Information | Notation |
|---|---|
| The round of information provision | |
| Box ID (1, 2, or 3) | |
| Number of continuous dissatisfaction | |
| Number of continuous incompliance | |
| Number of continuous transition |
| Notations | Definitions |
|---|---|
| objective function | |
| total travel time on route between origin–destination (OD) pair | |
| penalty parameter | |
| weighting parameter in robust control | |
| number of scenarios considered in robust control | |
| objective value under scenario | |
| group of drivers who choose route 1 | |
| group of drivers who choose route 2 | |
| group of drivers who comply with VMS-based information | |
| set of routes between OD pair | |
| traffic flow rate on route at time | |
| satisfaction rate of VMS information at time | |
| compliance rate of VMS information service at time | |
| ratio of red segments in the VMS panel on route at time | |
| ratio of yellow segments in the VMS panel on route at time | |
| estimated ratio of red segments on route at time | |
| estimated ratio of yellow segments on route at time | |
| proactive adjustment of red segment ratio on route at time | |
| proactive adjustment of yellow segment ratio on route at time | |
| disturbance or random component to describe the uncertainty in diversion behavior | |
| disturbance or random component to describe the uncertainty in the satisfaction rate | |
| parameters of the driver diversion model | |
| total length of route | |
| dummy variable of diversion advice, i.e., 1 indicates diversion advice on VMS panel, and 0 indicates no diversion advice | |
| parameters of driver satisfaction model | |
| probability of diversion for driver | |
| probability of driver satisfied with VMS service on route | |
| experiential split rate | |
| split rate of drivers who comply with VMS-based information at time | |
| actual split rate at time | |
| cycle time at intersection on route at time | |
| green split at intersection on route at time | |
| group of signal control parameters at time | |
| traffic state estimation function | |
| function of the compliance rate with respect to satisfaction rate | |
| decision function based on the probabilities of different choices |
| Link | Free-Flow Time (s) | Capacity (veh/h) | Length (m) |
|---|---|---|---|
| 1, 2, 4, 5 | 30 | 3000 | 300 |
| 3 | 30 | 3000– | 300 |
| 6,7, 8, 9, 10 | 30 | 2000 | 300 |
| 11, 12, 13, 14 | 30 | 1000 | 300 |
| 15, 16, 17, 18 | 30 | 1000 | 300 |
| Traffic Flow Rate | Scenario | Results | PC | RC | PI | RI (Baseline) | Improvement |
|---|---|---|---|---|---|---|---|
| 4000 veh/h | Normal traffic | Total travel time | 78.65 | 83.01 | 85.27 | 87.32 | 9.9% |
| Satisfaction rate | 0.95 | 0.83 | 0.93 | 0.76 | 20% | ||
| Incident | Total travel time | 85.97 | 116.96 | 95.64 | 121.54 | 28.8% | |
| Satisfaction rate | 0.89 | 0.58 | 0.78 | 0.74 | 23.8% |
| Case | Standard Deviation of the Estimation Error Term | Total Travel Time (h): | Difference (%): |
|---|---|---|---|
| 1 | 10% | 87.32 | - |
| 2 | 20% | 90.14 | +3.23% |
| 3 | 30% | 92.96 | +6.46% |
| 4 | 40% | 104.03 | +19.14% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Y.; Zhang, K.; Chen, X.; Li, M. Proactive Coordination of Traffic Guidance and Signal Control for a Divergent Network. Mathematics 2023, 11, 4262. https://doi.org/10.3390/math11204262
Guo Y, Zhang K, Chen X, Li M. Proactive Coordination of Traffic Guidance and Signal Control for a Divergent Network. Mathematics. 2023; 11(20):4262. https://doi.org/10.3390/math11204262
Chicago/Turabian StyleGuo, Yaming, Ke Zhang, Xiqun Chen, and Meng Li. 2023. "Proactive Coordination of Traffic Guidance and Signal Control for a Divergent Network" Mathematics 11, no. 20: 4262. https://doi.org/10.3390/math11204262
APA StyleGuo, Y., Zhang, K., Chen, X., & Li, M. (2023). Proactive Coordination of Traffic Guidance and Signal Control for a Divergent Network. Mathematics, 11(20), 4262. https://doi.org/10.3390/math11204262